Изобретение относится к области тренажных средств для подготовки космонавтов к действиям после посадки космического аппарата на водную поверхность, к средствам для имитации волнения моря при проведении исследований и испытаний в моделируемых условиях.
Известны волнопродукторы - устройства имитации морского волнения в бассейнах, обеспечивающие создание волн определенной высоты (см. www.krylov.com.ru. Мелководный бассейн. Маневренно-мореходный бассейн). Волнопродуктор представляет собой перемещающийся в воде поршень, который создает перемещающуюся в бассейне волну. Обеспечивая циклическое движение поршня, создают последовательность волн, которые воздействуют на помещенный в бассейн объект. Данные устройства требуют большого расхода энергии, т.к. перемещают большие массы воды. Такие устройства жестко привязаны к бассейну, в котором они создают волнение, и перемещение их на другие бассейны затруднительно. Кроме того, для ряда задач необходимо не создавать волнение на всей поверхности бассейна, а только в определенной его части, где размещается испытуемый объект. При этом необходимо обеспечить требуемые параметры колебаний объекта, как при воздействии на него волн заданной балльности.
Известны различные конструкции надувных лодок, содержащих в элементах корпуса надувные баллоны и для выполнения различных функций снабженных различными устройствами: муфтами для размещения грузов, ручками для переноски лодки (см. патент "Надувная лодка", номер публикации 93020085 от 1995.08.27, МПК В 63 В 7/08), продольные и поперечные балки и стойки для размещения пассажиров (см. патент "Лодка", номер публикации 2053918 от 1996.02.10, МПК В 63 В 7/08 ) и т.д.
В качестве прототипа выбрана конструкция надувной лодки (см. патент "Надувная лодка", номер публикации 96112736 от 20.04.1998, МПК В 63 В 7/08). содержащая надувные борта, сходящиеся в носовой и кормовой оконечностях лодки, днище, герметично прикрепленное к надувным бортам, и поперечную надувную банку, размещенную внутри лодки, отличающаяся тем, что днище закреплено выше нижней линии боковых надувных бортов и по нижней линии носового и кормового отсеков, образуя катамаранную конструкцию в сечении с двумя продольными баллонами бортов, при этом надувные борта разделены внутренними перемычками на герметичные отсеки, снабженные клапанами, смещенными к кормовой и носовой частям относительно поперечной оси лодки, кроме того, надувная лодка снабжена элементами для переноски ее с грузом и внутренними и внешними узлами креплении. В конструкции предлагаемого устройства имитации используются общие с прототипом признаки: первый и второй пневмобаллоны, рама крепления (днище), прикрепленная к пневмобаллонам.
Недостатками аналогов и прототипа является то, что они не позволяют обеспечить имитацию воздействия морских волн на макеты спускаемых аппаратов космических кораблей при проведении тренировок в моделируемых условиях в гидролаборатории, небольшом замкнутом водоеме или при штилевом море, т.е. они не инвариантны к бассейну, в котором проводятся тренировки.
Тренировки космонавтов к действиям после посадки проводятся на макетах спускаемых аппаратов, размещаемых в открытом море. При этом на спускаемый аппарат воздействуют морские волны, вызывая его колебания с определенной амплитудой и частотой. Космонавты отрабатывают заданные последовательности действий в условиях ряда факторов, в том числе и воздействия колебаний спускаемого аппарата. При проведении тренировок космонавтов к действиям после посадки на водную поверхность в условиях гидролаборатории, небольшого замкнутого водоема или штилевого моря необходимо обеспечить имитацию волнения моря, т.е. колебания спускаемого аппарата, помещенного в гидросреду, с определенной амплитудой и частотой, соответствующими параметрам колебания спускаемого аппарата в реальных условиях. При этом устройство должно быть инвариантно к бассейну, в котором проводятся тренировки, и обеспечивать возможность имитации воздействия морского волнения в условиях любой гидросреды.
Для обеспечения имитации воздействия морского волнения в условиях любой гидросреды в устройство, включающее первый и второй пневмобаллоны, раму крепления, введены блок задания условий тренировки, включающий первый и второй блоки задания частоты колебаний и блок задания амплитуды, блок управления, канал управления по крену, канал управления по тангажу, канал управления по амплитуде, пневмонасос, источник газа высокого давления, четыре опоры, выполненные с возможностью изменения их длины и прикрепленные к раме крепления симметрично друг относительно друга с возможностью их вращения, канал управления по крену включает первый инвертор, последовательно соединенные первый клапан наддува, первый пневмобаллон, первый пневмоклапан разрежения и последовательно соединенные второй клапан наддува, второй пневмобаллон, второй пневмоклапан разрежения, выход инвертора подключен к управляющим входам второго клапана наддува и первого пневмоклапана разрежения, канал управления по тангажу включает второй инвертор, последовательно соединенные третий клапан наддува, третий пневмобаллон, третий пневмоклапан разрежения и последовательно соединенные четвертый клапан наддува, четвертый пневмобаллон, четвертый пневмоклапан разрежения, выход второго инвертора подключен к управляющим входам четвертого клапана наддува и третьего пневмоклапана разрежения, канал управления по амплитуде включает третий инвертор, последовательно соединенные пятый клапан наддува, пятый пневмобаллон, пятый пневмоклапан разрежения, выход третьего инвертора подключен к управляющему входу пятого пневмоклапана разрежения, при этом выходы первого, второго, третьего, четвертого и пятого пневмоклапанов разрежения подключены ко входу пневмонасоса, выход которого связан со входом источника газа высокого давления, выход которого соединен со вторыми входами первого, второго, третьего, четвертого и пятого клапанов наддува, выходы первого и второго блоков задания частоты колебаний и блока задания амплитуды, являющиеся первым, вторым и третьим выходами блока задания условий тренировки, связаны с первым, вторым и третьим входами блока управления, первый выход которого подключен ко входам первого инвертора, первого клапана наддува и второго клапана разрежения, второй выход подключен ко входам второго инвертора, третьего клапана наддува и четвертого клапана разрежения, третий выход подключен ко входам третьего инвертора и пятого клапана наддува, при этом пневмобаллоны каналов управления по крену и тангажу установлены на концах опор симметрично друг относительно друга, а пневмобаллон канала управления по амплитуде установлен на раме крепления.
Структурная схема предлагаемого устройства представлена на фиг.1 и включает в себя следующие блоки и узлы: блок 1 задания условий тренировки, состоящий из первого 2 и второго 3 блоков задания частоты и блока 4 задания амплитуды, блок 5 управления, канал 6 управления по крену, первый инвертор 7, первый 8 клапан наддува, первый пневмобаллон 9, первый клапан разрежения 10, второй 11 клапан наддува, второй пневмобаллон 12, второй клапан разрежения 13, канал 14 управления по тангажу, второй инвертор 15, третий 16 клапан наддува, третий пневмобаллон 17, третий клапан разрежения 18, четвертый 19 клапан наддува, четвертый пневмобаллон 20, четвертый клапан разрежения 21, канал 22 управления по амплитуде, третий инвертор 23, пятый 24 клапан наддува, пятый пневмобаллон 25, пятый клапан разрежения 26, пневмонасос 27, источник 28 газа высокого давления.
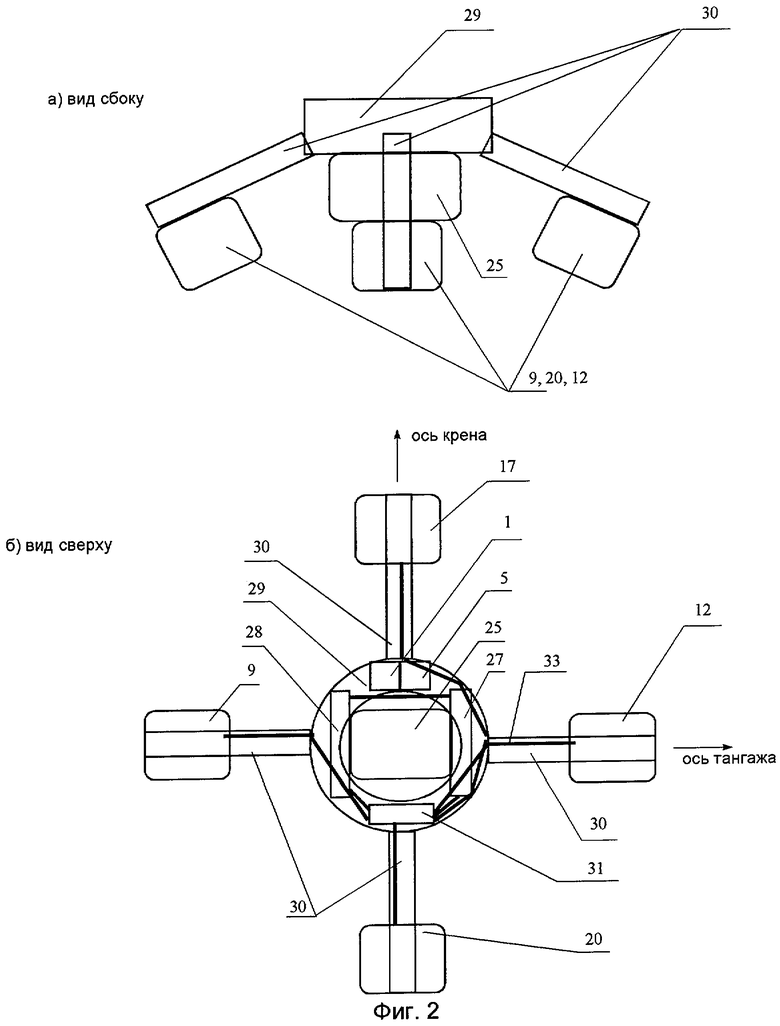
На фиг.2 приведены виды сбоку и сверху схемы размещения блоков устройства имитации волнения моря, где изображено: рама 29 крепления, четыре опоры 30, блок 31 пневмоклапанов. Опоры 30 прикреплены к раме 29 с возможностью их вращения в вертикальной плоскости относительно рамы 29 крепления. Опоры 30 выполнены с возможностью изменения их длины. На концах опор 30 прикреплены превмобаллоны 9, 12, 17, 20. Пневмобаллон 25 прикреплен к раме 29 крепления по оси симметрии. Пневмобаллоны связаны с блоком 31 клапанов пневмопроводами 33, выполненными из эластичных шлангов (резиновых, пластиковых).
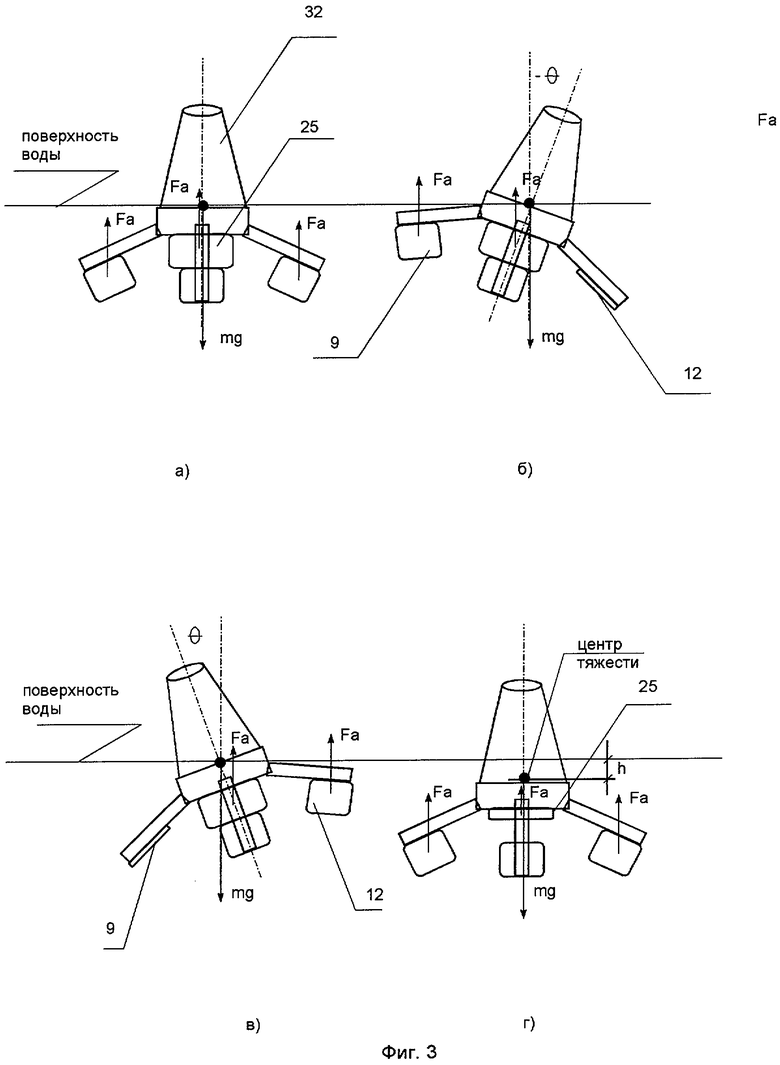
На фиг.3 приведена схема применения предлагаемого устройства на замкнутой акватории при отсутствии волнения водной поверхности, где изображено: 32 - макет спускаемого аппарата космического корабля. Макет 32 размещен на раме 29 и жестко присоединен к ней. На поз.а) представлено исходное состояние, при котором выталкивающие силы Fa со стороны пневмобаллонов 9 и 12 уравновешивают друг друга, вес макета 32 mg уравновешен суммарной выталкивающей силой. На поз.б) представлено состояние устройства в случае, когда пневмобаллон 9 наполнен газом, а из пневмобаллона 12 газ откачен, при этом выталкивающая сила со стороны пневмобаллона 9 приводит к кренению макета на угол - θ. На поз.в) представлено состояние устройства при наполнении газом пневмобаллона 12 и откачивании газа из пневмобаллона 9, это приводит к кренению макета в противоположную сторону на угол θ. На поз.г) представлено состояние устройства при откачивании газа из пневмобаллона 25, это приводит к уменьшению выталкивающей силы и опусканию центра тяжести макета 32 на высоту h.
Блок 1 задания условий тренировки предназначен для управления режимами работы имитатора. Блок 1 состоит из блоков 2 и 3 задания частоты колебаний по крену и тангажу соответственно и блока 4 задания амплитуды колебаний. Блоки 2, 3 и 4 могут быть выполнены в виде набора тумблеров, клавиатуры, кнопок. В зависимости от требуемых условий проведения тренировки связь блоков 2, 3 и 4 с блоком 5 управления может быть организована по проводам, как указано на фиг.1, или по радиоканалу.
Блок 5 управления предназначен для формирования и выдачи управляющих сигналов для открытия и закрытия пневмоклапанов 8, 16, 24 наддува и пневмоклапанов разрежения 10, 13, 18, 21, 26 в соответствии с условиями, заданными из блоков 2, 3 и 4. Блок 5 может быть выполнен в виде электронного блока, генерирующего импульсы, длительность и скважность которых зависят от параметров сигналов из блоков 2, 3 и 4. Блок 5 может быть выполнен в виде трех мультивибраторов.
Первый 7, второй 15 и третий 23 инверторы обеспечивают инвертирование управляющих сигналов из блока 5 управления и подачу их на управляющие входы клапанов 11, 19 наддува и клапанов 13, 21, 26 разрежения. Инверторы могут быть выполнены в виде электронного блока или логической микросхемы по известным схемам.
Логика работы блока 5 управления и инверторов 7, 15, 23 заключается в следующем: клапаны одного пневмобаллона всегда должны находиться в разных состояниях - если открыт клапан 8 наддува пневмобаллона 9, то клапан 10 разрежения этого пневмобаллона должен быть закрыт и соответственно при закрытии клапана 8 открывается клапан 10. Это должно выполняться для клапанов всех пневмобаллонов. При этом клапаны наддува 8 и 11 пневмобаллонов одного канала управления или по крену или по тангажу одновременно должны находиться в разных состояниях, как и клапаны 10 и 13 разрежения.
Клапаны 8 и 11 наддува предназначены для подсоединения входов заданных пневмобаллонов 9 и 12 к источнику 28 газа высокого давления. Управляющие входы первого инвертора 7, клапанов 8 и 13 канала 6 управления по крену связаны с первым выходом блока 5 управления. Клапаны могут быть выполнены в виде промышленно выпускающихся пневмоклапанов.
Выполнение блоков канала 14 управления по тангажу и канала 22 управления по амплитуде аналогично выполнению блоков канала 6. Назначение блоков также аналогично. Управляющие входы второго инвертора 15, клапанов 16 и 21 канала 14 управления по тангажу связаны со вторым выходом блока 5 управления. Управляющие входы третьего инвертора 23, клапана 24 канала 22 управления по амплитуде связаны с третьим выходом блока 5 управления.
Пневмобаллоны 9, 12, 17, 20, 25 предназначены для создания выталкивающей силы, направленной через опоры 30 на различные области рамы 29 крепления. Они могут быть выполнены в виде герметичных оболочек из резины, полимерных материалов и т.д., имеющих пневматические трубки для входа и выхода газа. Пневмобаллоны 9, 12, 17, 20 размещаются на опорах 30, прикрепленных по периметру нижней части рамы крепления. Пневмобаллон 25 размещается под центром тяжести устройства. Входы пневмобаллонов связаны с выходами соответствующих клапанов наддува.
Клапаны 10, 13, 18, 21, 26 разрежения предназначены для подсоединения выходов соответствующих пневмобаллонов к пневмонасосу 27. Управление открытием и закрытием клапанов осуществляется по командам из блока 5 управления и инверторов.
Пневмонасос 27 предназначен для откачивания газа из пневмобаллонов при открытом состоянии одного из клапанов разрежения. Пневмонасос может быть выполнен в виде стандартного электронасоса, предназначенного для перекачивания газов. Вход пневмонасоса связан с выходами каналов 6, 14, 22 управления, которые являются выходами клапанов разрежения, а выход пневматически соединен с входом источника 28 газа высокого давления.
Источник 28 газа высокого давления предназначен для хранения запаса газа, требуемого для наполнения пневмобаллонов. Он может быть выполнен в виде стандартного баллона для хранения сжатых газов или пневмонасоса.
Для упрощения схемы принято, что каждый блок, требующий энергии питания, оснащен собственным источником питания, не показанным на структурной схеме.
Рама крепления 29 предназначена для размещения и присоединения к ней основных блоков устройства и присоединения устройства к объекту, который необходимо подвергнуть воздействию волнения моря, в частности к спускаемому аппарату во время проведения испытаний и тренировок космонавтов. Она может быть выполнена из металла в виде части полусферической оболочки, соответствующей по форме головной части спускаемого аппарата, или в виде эластичной поверхности.
Опоры 30 предназначены для размещения на них пневмобаллонов. Опоры выполнены с возможностью изменения их длины, например телескопическими. Они крепятся к раме 29 во взаимно перпендикулярных плоскостях с возможностью их вращения в вертикальной плоскости. Длина опор и угол их наклона относительно рамы 29 крепления определяется требуемыми углами наклона спускаемого аппарата 32 в процессе тренировки. На свободных концах опор крепятся пневмобаллоны.
При размещении устройства на раме 29 клапаны наддува и разрежения целесообразно выполнить в виде блока 31 клапанов, который показан на фиг.2.
Функционирование устройства происходит следующим образом. Перед началом тренировки на раму 29 крепится требуемый объект 32. Устанавливается и фиксируется требуемая длина опор 30 и угол их наклона относительно рамы 29 крепления. Устройство помещается в гидросреду. Инструктор, проводящий тренировку, на блоке 1 задания условий тренировки в блоках 2 и 3 устанавливает требуемое значение частоты колебаний спускаемого аппарата по крену и тангажу соответственно, а в блоке 4 - требуемое значение амплитуды колебаний. Эти сигналы поступают на первый, второй и третий входы блока 5 управления, где в зависимости от их величины устанавливается длительность импульсов открытого и закрытого состояния клапанов наддува и разрежения. Если в блоке 5 используется мультивибратор, то длительность выдаваемых импульсов пропорциональна величине сигнала из блоков 2, 3 и 4. Сигналы из блока 5 управления поступают на вход инверторов 7, 15, 23 и преобразуются в обратные сигналы. В начальный момент времени все пневмобаллоны заполнены газом. Управляющие сигналы из блока 5 открывают клапаны 8, 13, 16, 21, 24, а сигналы от инверторов 7, 15, 23 закрывают клапаны 11, 10, 19, 18 и 26. Открытые клапаны наддува обеспечивают поступление газа из источника 28 в пневмобаллоны 9, 17 и 25. Через открытые клапаны разрежения 13, 21, 26 газ из пневмобаллонов 12, 20 откачивается пневмонасосом 27 и подается в источник газа высокого давления. Изменение объема газа в пневмобаллонах 12, 17 приводит к уменьшению выталкивающей силы (см. фиг.3, поз. б), действующей на эти пневмобаллоны, что обеспечивает наклон оси спускаемого аппарата на угол θ. При этом наклон спускаемого аппарата обеспечивается по оси крена и по оси тангажа. При изменении управляющего сигнала из блока 5 управления происходит закрытие клапанов 8, 13, 16, 21, 24, а сигналы от инверторов 7, 15, 23 открывают клапаны 11, 10, 19, 18 и 26. Открытые клапаны наддува обеспечивают поступление газа из источника 28 в пневмобаллоны 12, 20. Через открытые клапаны разрежения 10, 18, 26 газ из пневмобаллонов 9, 17, 25 откачивается пневмонасосом 27 и подается в источник газа высокого давления. Изменение объема газа в пневмобаллонах 12, 17, 25 приводит к уменьшению выталкивающей силы (см. фиг.3, поз. в, г.), действующей на эти пневмобаллоны, что обеспечивает наклон оси спускаемого аппарата на угол θ и опускание центра тяжести на величину h.
Сигналы от блока 5 управления на каждый канал 6, 14, 22 управления по крену, тангажу и амплитуде подаются со своей скважностью, что обеспечивает независимые движения устройства по каждому каналу.
При последующих циклах происходит откачивание газа из одного пневмобаллона и наполнение газом другого пневмобаллона в каждом из каналов управления по крену и тангажу. В результате происходит кренение спускаемого аппарата в двух плоскостях. Периодическое наполнение газом и откачка газа из баллона 25 приводит к опусканию центра тяжести устройства, что имитирует колебания аппарата на волновой поверхности. Наложение движений оси симметрии спускаемого аппарата по крену и тангажу и движения центра тяжести обеспечивает суммарное движение спускаемого аппарата, аналогичное его колебаниям на волновой поверхности моря. Результирующие параметры колебания спускаемого аппарата соответствует колебаниям спускаемого аппарата в условиях волнения моря.
Изменение входных параметров в блоке 1 задания условий тренировки приводит к изменению параметров сигнала, выдаваемого блоком 5 управления, и соответственно к изменению параметров колебания спускаемого аппарата.
Применение предлагаемого устройства при проведении тренировок космонавтов к действиям после посадки на водную поверхность в условиях гидролаборатории, небольшого замкнутого водоема или штилевого моря позволит обеспечить имитацию волнения моря, т.е. колебания спускаемого тренажера с определенной амплитудой и частотой.
Кроме того, при проведении таких тренировок космонавтов возможно обеспечить одинаковые условия подготовки в разные моменты времени, т.е. обеспечить типовые условия тренировок и легко варьировать их. Предлагаемое устройство не привязано к конкретному водоему и может использоваться в любых условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЁРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОСМИЧЕСКИХ КОРАБЛЕЙ К ДЕЙСТВИЯМ ПОСЛЕ ПОСАДКИ ПИЛОТИРУЕМОЙ КАПСУЛЫ НА МОРЕ С ВОЛНЕНИЕМ | 2020 |
|
RU2734659C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| ИМИТАТОР АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1988 |
|
RU1535223C |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Тренажер для обучения персонала транспортных средств | 1984 |
|
SU1163346A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
Устройство имитации морского волнения относится к области тренажных средств для подготовки космонавтов к действиям после посадки космического аппарата на море, к средствам для имитации волнения моря при проведении исследований и испытаний в моделируемых условиях в гидросреде. Устройство состоит из блока задания условий тренировки, блока управления, каналов управления по крену, тангажу и амплитуде, пневмонасоса, источника газа высокого давления, рамы крепления, опор. Каналы управления по крену и тангажу включают инвертор, по два клапана наддува и разрежения, два пневмобаллона каждый, канал управления по амплитуде включает инвертор, клапаны наддува и разрежения, пневмобаллон. Устройство размещается на раме крепления, присоединенной к спускаемому аппарату. Применение устройства при проведении тренировок космонавтов к действиям после посадки на водную поверхность в условиях гидролаборатории, небольшого замкнутого водоема или штилевого моря позволяет обеспечить имитацию волнения моря, т.е. колебания спускаемого аппарата с определенной амплитудой и частотой. При проведении тренировок обеспечиваются типовые условия для разных экипажей. Устройство инвариантно к бассейну, в котором проводятся тренировки. 7 ил.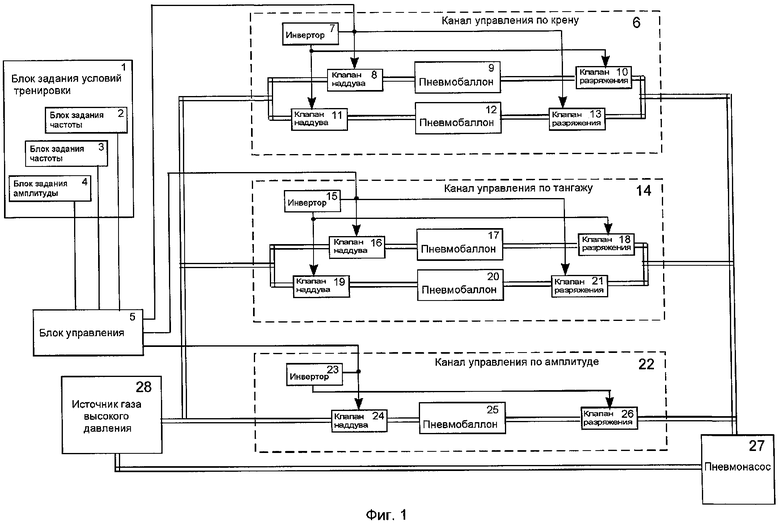
Устройство имитации морского волнения, включающее первый и второй пневмобаллоны, раму крепления, отличающееся тем, что в него введены блок задания условий тренировки, включающий первый и второй блоки задания частоты колебаний и блок задания амплитуды, блок управления, канал управления по крену, канал управления по тангажу, канал управления по амплитуде, пневмонасос и источник газа высокого давления, четыре опоры, выполненные с возможностью изменения их длины и прикрепленные к раме крепления с возможностью их вращения, канал управления по крену включает первый инвертор, последовательно соединенные первый клапан наддува, первый пневмобаллон, первый пневмоклапан разрежения и последовательно соединенные второй клапан наддува, второй пневмобаллон, второй пневмоклапан разрежения, выход инвертора подключен к управляющим входам второго клапана наддува и первого пневмоклапана разрежения, канал управления по тангажу включает второй инвертор, последовательно соединенные третий клапан наддува, третий пневмобаллон, третий пневмоклапан разрежения и последовательно соединенные четвертый клапан наддува, четвертый пневмобаллон, четвертый пневмоклапан разрежения, выход второго инвертора подключен к управляющим входам четвертого клапана наддува и третьего пневмоклапана разрежения, канал управления по амплитуде включает третий инвертор, последовательно соединенные пятый клапан наддува, пятый пневмобаллон, пятый пневмоклапан разрежения, выход третьего инвертора подключен к управляющему входу пятого пневмоклапана разрежения, при этом выходы первого, второго, третьего, четвертого и пятого пневмоклапанов разрежения подключены ко входу пневмонасоса, выход которого связан со входом источника газа высокого давления, выход которого соединен со вторыми входами первого, второго, третьего, четвертого и пятого клапанов наддува, выходы первого и второго блоков задания частоты колебаний и блока задания амплитуды, являющиеся первым, вторым и третьим выходами блока задания условий тренировки, связаны с первым, вторым и третьим входами блока управления, первый выход которого подключен ко входам первого инвертора, первого клапана наддува и второго клапана разрежения, второй выход подключен ко входам второго инвертора, третьего клапана наддува и четвертого клапана разрежения, третий выход подключен ко входам третьего инвертора и пятого клапана наддува, при этом пневмобаллоны каналов управления по крену и тангажу установлены на концах опор симметрично относительно друг друга, а пневмобаллон канала управления по амплитуде установлен на раме крепления.
| НАДУВНАЯ ЛОДКА | 1996 |
|
RU2104205C1 |
| RU 2053918 C1 10.02.1996 | |||
| RU 93020085 A 27.08.1995 | |||
| US 6178911 В1 30.01.2001 | |||
| US 6460477 В1 08.10.2002. | |||

