Изобретение относится к области приема и обработки информации в условиях воздействия помех и, в частности, к радиолокации.
Известна многоэлементная адаптивная антенная решетка с управляемой диаграммой направленности [1, с.202, рис.5.17], которая состоит из N пространственных каналов. Каждый из пространственных каналов включает в себя последовательно соединенные: элемент антенной решетки, корреляционный смеситель, усилитель, интегрирующий фильтр, элемент управления диаграммы направленности, смеситель, сумматор.
Выход каждого пространственного канала соединен с соответствующим входом сумматора, выход которого является выходом антенной решетки. Выход каждого из элементов антенной решетки подключен ко второму входу смесителя соответствующего пространственного канала. На второй вход элемента управления диаграммы направленности каждого из пространственных каналов вводится соответствующий сигнал управления диаграммы направленности. Выход антенной решетки подключен ко всем вторым входам корреляционных смесителей.
Режим работы данного устройства предполагает пространственную статичность диаграммы направленности и источника помехи. В случае изменяющегося на интервале адаптации антенной решетки пространственного рассогласования максимума диаграммы направленности и источника помех формирование провалов в диаграмме направленности будет происходить с ошибкой. Это приведет к низкой эффективности пространственного подавления помехи.
Таким образом, недостатком данного устройства является низкая эффективность пространственного подавления помех.
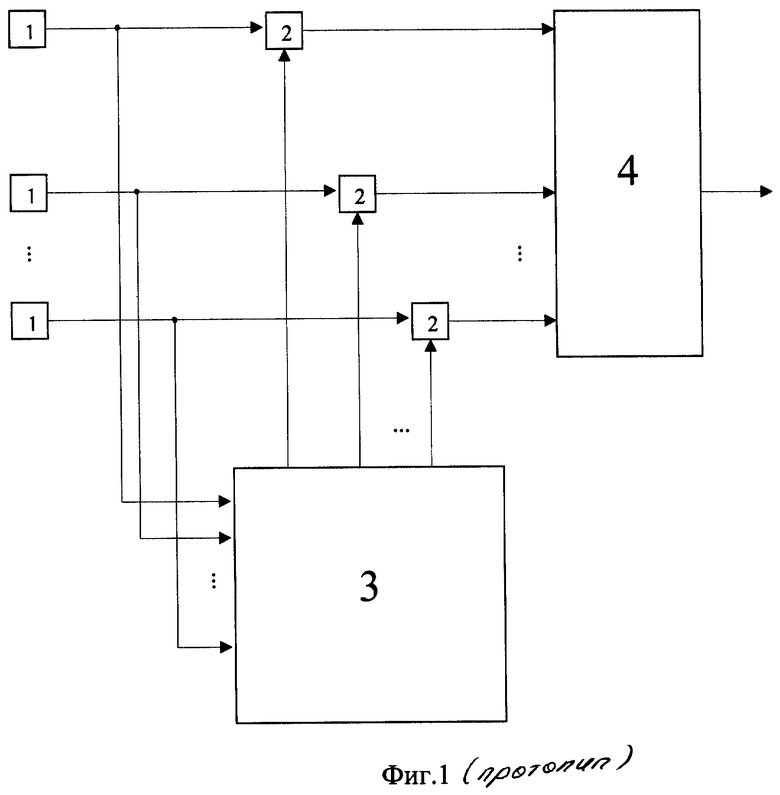
Наиболее близким к изобретению по совокупности признаков является устройство адаптивной антенной решетки [2, с.338, рис.5.10], структурная схема которого приведена на фиг.1.
Входом адаптивной антенной решетки являются N элементов антенной решетки 1, выходы которых соединены с соответствующими первыми входами N элементов весовых коэффициентов 2 и соответствующими входами адаптивного процессора 3. К каждому из управляемых входов элементов весовых коэффициентов 2 подключен соответствующий выход адаптивного процессора 3. Выходы элементов весовых коэффициентов 2 являются соответствующими входами сумматора 4, являющегося выходом адаптивной антенной решетки.
Весовые коэффициенты обеспечивают управление амплитудно-фазовым распределением элементов антенной решетки, то есть являются комплексными.
Выбор прототипа с цифровым управлением обусловлен рядом достоинств. В настоящее время в адаптивных антенных решетках наряду с цифровыми используются аналоговые контуры управления. Достоинством аналоговых контуров управления является возможность обработки сигналов в реальном масштабе времени, большой динамический диапазон сигналов, простота реализации. Однако аналоговые контуры управления обладают большими габаритами и высоким энергопотреблением. Поэтому использование их в адаптивных антенных решетках с большим числом антенных элементов 1 вызывает сложности в реализации таких адаптивных антенных решеток. Дополнительные трудности в реализации аналоговых контуров управления возникают из-за нелинейности элементов фидерного тракта, контуров управления и весовых коэффициентов. Поэтому для устранения этих недостатков в адаптивных антенных решетках используют адаптивный цифровой процессор.
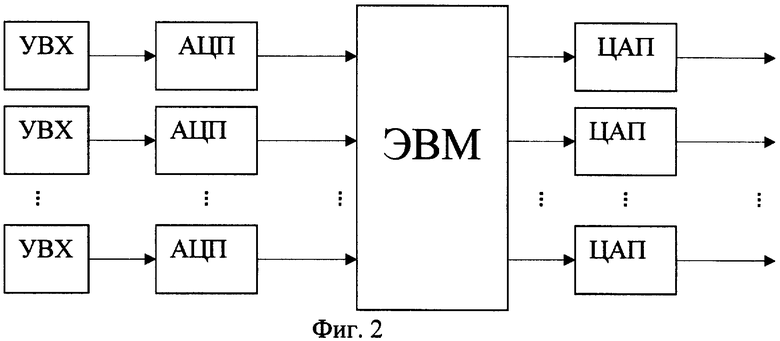
Структурная схема адаптивного процессора 3, изображенная на фиг.2, содержит:
УВХ - устройство выборки и хранения сигналов;
АЦП - аналого-цифровой преобразователь;
ЭВМ - электронно-вычислительная машина;
ЦАП - цифроаналоговый преобразователь.
В основу адаптивного процессора 3, изображенного на фиг.2, положено вычислительное устройство - электронно-вычислительная машина (ЭВМ). Такой процессор работает только с цифровыми сигналами. Поэтому на входе процессора предусматривается аналого-цифровой преобразователь (АЦП), а на входе - цифроаналоговый преобразователь (ЦАП). Для оценки весовых коэффициентов используют корреляционную матрицу помех. С этой целью перед АЦП включают устройство выборки и хранения (УВХ) сигналов. Это устройство предназначено для оценки сигнала в определенный момент времени и хранения этого значения в течение некоторого времени. В случае, когда обрабатываемый сигнал относительно низкочастотный, то есть период несущих колебаний много больше времени выполнения операций в ЭВМ, тогда цифровой процессор будет успевать отслеживать в реальном масштабе времени высокочастотный сигнал и устройство выборки и хранения сигналов при этом не понадобится.
Определение адаптивным процессором 3 весовых коэффициентов может производиться по различным критериям оптимальности. К наиболее известным критериям оптимальности при расчете весовых коэффициентов [2, с.151] относятся:
1) минимум среднеквадратической ошибки;
2) максимум отношения сигнал / (шум + помеха);
3) максимум отношения правдоподобия;
4) минимум мощности выходного сигнала.
Имеет место почти полная идентичность соотношений для расчета оптимальных весовых коэффициентов Wopt, так как все формулы для различных критериев могут быть представлены в виде:

где β - постоянный коэффициент;
R-1 - обратная корреляционная матрица;
Sc - вектор, описывающий направление прихода полезного сигнала.
В случае, когда полезный сигнал и помеха разнесены по пространству более чем на ширину диаграммы направленности (т.е. помеха воздействует по боковым лепесткам) R≈Rхх, где Rхх - корреляционная матрица помех, вычисляемая по формуле [2, с.75, формула (1.200)]:
По определению корреляционная матрица помех Rхх должна вычисляться посредством усреднения по реализациям. Но имеется только одна реализация. Поэтому в предположении об эргодичности случайного процесса [3, с.124], по которому имеется только единственная реализация, корреляционную матрицу помех Rхх вычисляют путем усреднения во времени.
Во всех известных устройствах при применении указанных критериев предполагают, что на интервале усреднения корреляционной матрицы помех пространственное рассогласование между максимумом диаграммы направленности и источником помех отсутствует. На практике рассогласование может создаваться либо при сканировании диаграммы направленности, либо при изменении угловых координат источника помех относительно РЛС, либо при одновременном существовании указанных причин. Однако, проведенные расчеты показывают, что на интервале усреднения корреляционной матрицы помех изменение угловых координат источника помех относительно РЛС вносит незначительное угловое рассогласование и в большинстве случаев им можно пренебречь. Сканирование диаграммы направленности вносит значительные ошибки в расчет корреляционной матрицы помех Rхх, чем снижает эффективность пространственного подавления помех в РЛС.
Выражение для (m,n) элемента корреляционной матрицы помех Rхх, рассчитанной в условиях сканирования диаграммы направленности на интервале усреднения, представленного последовательностью {t1,t2,...,tL}, будет в соответствии с формулой (2) иметь вид

где i - номер временного отсчета;
 - пространственная структура помехи, принятой m-м элементом антенной решетки 1 в момент времени ti;
- пространственная структура помехи, принятой m-м элементом антенной решетки 1 в момент времени ti;
 - значение фазы в пространственной структуре помехи, принятой m-м элементом антенной решетки 1 в момент времени ti, без влияния сканирования диаграммы направленности;
- значение фазы в пространственной структуре помехи, принятой m-м элементом антенной решетки 1 в момент времени ti, без влияния сканирования диаграммы направленности;
 - значение в момент времени ti в m-м элементе антенной решетки 1 фазовой составляющей в пространственной структуре помехи, вызванной влиянием сканирования диаграммы направленности;
- значение в момент времени ti в m-м элементе антенной решетки 1 фазовой составляющей в пространственной структуре помехи, вызванной влиянием сканирования диаграммы направленности;
 - пространственная структура помехи, принятой n-м элементом антенной решетки 1 в момент времени ti;
- пространственная структура помехи, принятой n-м элементом антенной решетки 1 в момент времени ti;
 - значение в момент времени ti в n-м элементе антенной решетки 1 фазовой составляющей в пространственной структуре помехи, вызванной влиянием сканирования диаграммы направленности;
- значение в момент времени ti в n-м элементе антенной решетки 1 фазовой составляющей в пространственной структуре помехи, вызванной влиянием сканирования диаграммы направленности;
 - значение фазы в пространственной структуре помехи, принятой n-м элементом антенной решетки 1 в момент времени ti, без влияния сканирования диаграммы направленности;
- значение фазы в пространственной структуре помехи, принятой n-м элементом антенной решетки 1 в момент времени ti, без влияния сканирования диаграммы направленности;
Xm(ti) - временная структура помехи, принятой m-м элементом антенной решетки 1 в момент времени ti;
Xn(ti) - временная структура помехи, принятой n-м элементом антенной решетки 1 в момент времени ti;
* - операция комплексного сопряжения.
Формула (3) показывает, что в каждый момент времени ti слагаемое образованной суммы (3) имеет добавочный множитель  приводящий к ошибкам в расчете корреляционной матрицы помех Rxx. При статическом условии, т.е. без сканирования диаграммы направленности, выражение для (m,n) элемента корреляционной матрицы помех Rxx на интервале усреднения, представленного последовательностью {t1,t2,...,tL], будет в соответствии с формулой (2) иметь вид
приводящий к ошибкам в расчете корреляционной матрицы помех Rxx. При статическом условии, т.е. без сканирования диаграммы направленности, выражение для (m,n) элемента корреляционной матрицы помех Rxx на интервале усреднения, представленного последовательностью {t1,t2,...,tL], будет в соответствии с формулой (2) иметь вид

Отличие формулы (4) от формулы (3) состоит в том, что у слагаемых в (4) отсутствуют добавочные множители  вызывающие ошибки в расчете корреляционной матрицы помех Rxx. Это объясняется тем, что неподвижность диаграммы направленности на интервале усреднения, представленного последовательностью {t1,t2,...,tL}, не вызывает появления фазовых набегов, которые образуются при сканировании диаграммы направленности.
вызывающие ошибки в расчете корреляционной матрицы помех Rxx. Это объясняется тем, что неподвижность диаграммы направленности на интервале усреднения, представленного последовательностью {t1,t2,...,tL}, не вызывает появления фазовых набегов, которые образуются при сканировании диаграммы направленности.
Таким образом, при сканировании диаграммы направленности фазовые набеги, вызванные сканированием диаграммы направленности в различные моменты времени в элементах антенной решетки 1, будут различными. Это приводит к тому, что полученная корреляционная матрица помех Rxx будет отличаться от корреляционной матрицы помех, полученной в статических условиях, т.е. без сканирования диаграммы направленности, что снижает эффективность пространственного подавления помех.
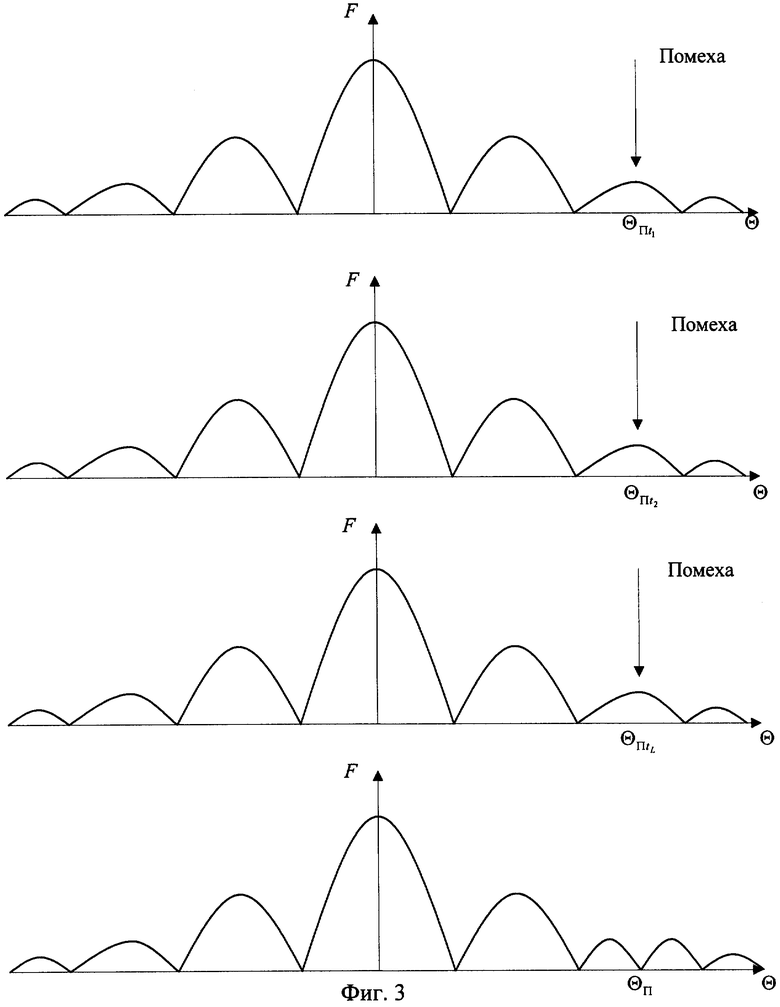
На фиг.3 показаны графики зависимости неподвижной диаграммы направленности адаптивной антенной решетки при воздействии помех [2, рис.5.1, с.328] и [4, рис.17.8, с.398]. По оси ординат буквой F обозначены значения диаграммы направленности. По оси абсцисс буквой Θ обозначены значения пространственных углов. Стрелками с надписью «Помеха» показаны угловые направления на источник помехи в моменты времени t1, t2 и tL. Пространственные углы направлений на источник помехи в указанные моменты времени обозначены, соответственно,  .
.
Представленный графический материал является иллюстрацией подавления помех адаптивной антенной решеткой при отсутствии сканирования диаграммы направленности. Показано, что в моменты времени t1, t2 и tL направление источника излучения помехи не меняется. По вычисленной корреляционной матрице помех Rxx адаптивный процессор 3 формирует весовые коэффициенты Wopt, которые обеспечивают формирование в диаграмме направленности провала до нулевого значения в направлении на источник помехи. Интерпретация работы адаптивной антенной решетки состоит из следующей последовательности действий:
1. Определяется исходная диаграмма направленности антенной решетки F0(θ).
2. Устанавливается по принятому помеховому сигналу направление на источник помехи θП.
3. Формируется с провалом в направлении на источник помехи диаграмма направленности адаптивной антенной решетки.
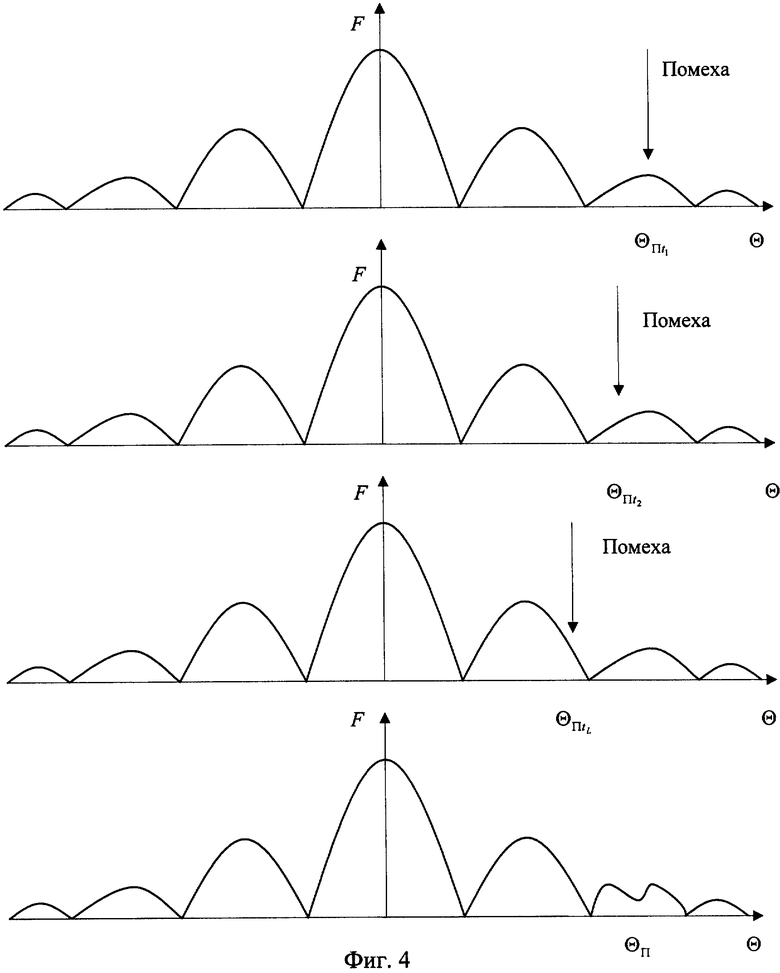
Однако, при сканировании диаграммы направленности работа адаптивной антенной решетки имеет отличия, которые отражены на фиг.4.
На фиг.4 показаны графики зависимости сканирующей диаграммы направленности адаптивной антенной решетки при воздействии помех. По оси ординат буквой F обозначены значения диаграммы направленности. По оси абсцисс буквой Θ обозначены значения пространственных углов. Стрелками с надписью «Помеха» показаны угловые направления на источник помехи в моменты времени t1, t2 и tL. Пространственные углы направлений на источник помехи в указанные моменты времени обозначены, соответственно,  .
.
Показано, что в моменты времени t1, t2 и tL направление на источник излучения помехи меняется в результате сканирования диаграммы направленности. По вычисленной корреляционной матрице помех Rxx адаптивный процессор 3 формирует весовые коэффициенты Wopt, которые, как показано на нижнем графике фиг.4, создают в диаграмме направленности провал, не обеспечивающий достижения нулевого значения в направлении на источник помехи. Это подтверждает снижение эффективности пространственного подавления помех по сравнению с пространственным подавлением помех адаптивной антенной решеткой с неподвижной диаграммой направленности.
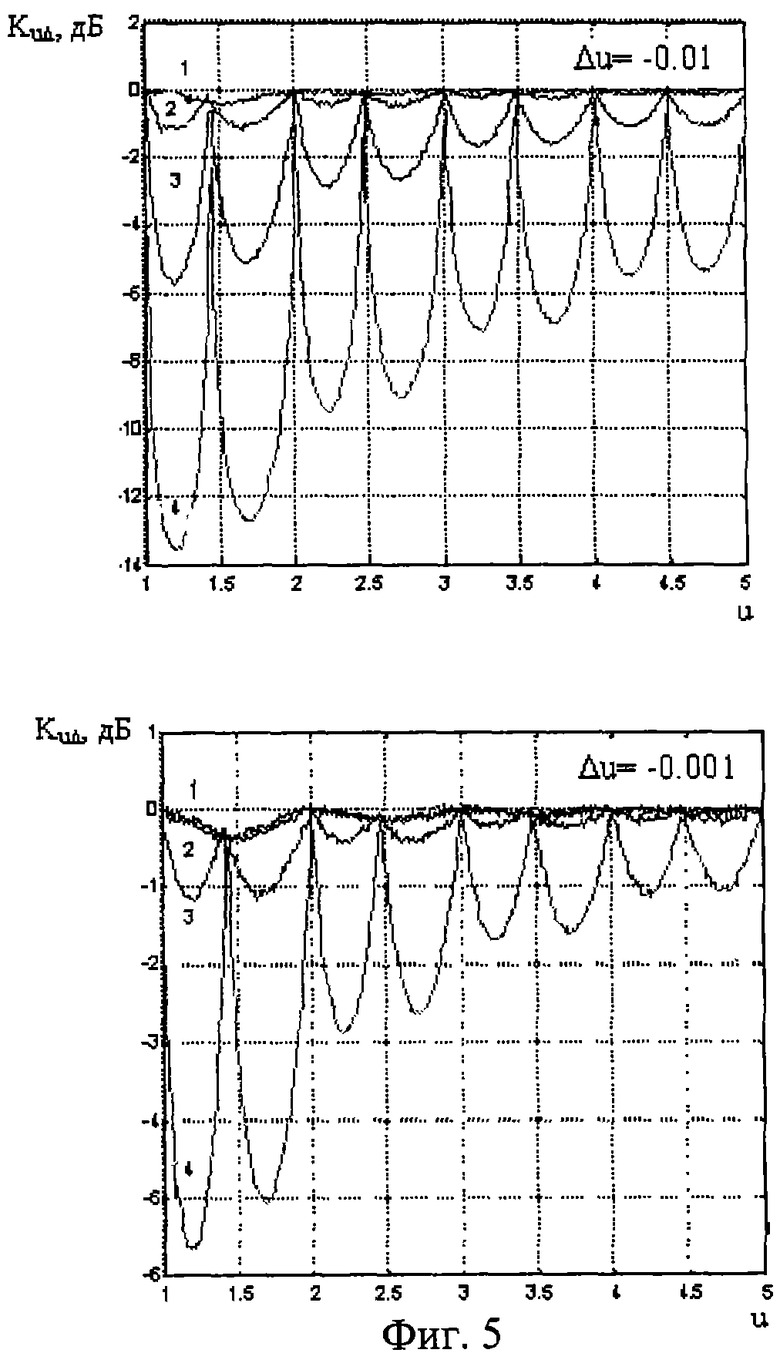
На фиг.5 показаны зависимости коэффициента использования энергии от углового параметра [5, с.115, с.321] по результатам моделирования адаптивной антенной решетки.
Коэффициент использования энергии показывает, какая часть энергии полезного сигнала используется «полезно» при наличии внешней помехи. Он характеризует потери энергии полезного сигнала при обработке полезного сигнала на фоне помех по сравнению с потерями энергии полезного сигнала при обработке полезного сигнала на фоне собственных шумов.
По оси ординат коэффициент использования энергии, измеряемый в дБ, обозначен КuΔ, дБ. По оси абсцисс буквой u обозначен безразмерный угловой параметр. Обозначены величины угловых смещений, вызванных сканированием диаграммы направленности: Δu=-0.01 и Δu=-0.001. Кривые, обозначенные цифрой 1, соответствуют воздействию помехи, превышающей собственные шумы на 20 дБ, цифрой 2 на 30 дБ, цифрой 3 на 40 дБ и цифрой 4 на 50 дБ. Результаты моделирования доказывают, что увеличение углового рассогласования, вызванного сканированием диаграммы направленности при прочих равных условиях, вызывает ухудшение эффективности пространственного подавления помех. Например, для помехи, характеризующейся уровнем 50 дБ, что соответствует кривой, обозначенной цифрой 4, ухудшение эффективности подавления при рассогласовании Δu=-0.001 составило 7 дБ и при рассогласовании Δu=-0.01 составило 13 дБ.
Таким образом, недостатком рассмотренного устройства, наиболее близкого к изобретению, является снижение эффективности пространственного подавления помех при сканировании диаграммы направленности.
Техническим результатом изобретения является создание адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, что приведет к повышению эффективности пространственного подавления помех адаптивной антенной решетки при сканировании диаграммы направленности.
Технический результат достигается тем, что в прототип, состоящий из N элементов антенной решетки, N элементов весовых коэффициентов, адаптивного процессора и сумматора, дополнительно вводятся (N×D) элементов весовых коэффициентов компенсации сканирования диаграммы направленности, D определяет количество возможных источников помех.
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема устройства, наиболее близкого к изобретению - адаптивная антенная решетка, на фиг.2 изображена структурная схема адаптивного процессора, на фиг.3 изображены графики зависимости неподвижной диаграммы направленности адаптивной антенной решетки при воздействии помех, на фиг.4 изображены графики зависимости сканирующей диаграммы направленности адаптивной антенной решетки при воздействии помех, на фиг.5 изображены графики зависимости коэффициента использования энергии в прототипе при воздействии помехи, на фиг.6 изображена структурная схема адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, на фиг.7 изображены графики зависимости коэффициента использования энергии в адаптивной антенной решетке, компенсирующей результат сканирования диаграммы направленности.
Адаптивная антенная решетка, компенсирующая результат сканирования диаграммы направленности, структурная схема которой изображена на фиг.6, состоит из N элементов антенной решетки 1, N элементов весовых коэффициентов 2, адаптивного процессора 3, сумматора 4, введенных (N×D) элементов весовых коэффициентов компенсации результатов сканирования диаграммы направленности 5, D определяет количество возможных источников помех.
Входом адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, являются элементы антенной решетки 1, выходы которых соединены с соответствующими первыми входами N элементов весовых коэффициентов 2. К каждому из управляемых входов элементов весовых коэффициентов 2 подключен соответствующий выход адаптивного процессора 3. Выходы элементов весовых коэффициентов 2 являются соответствующими входами сумматора 4, являющегося выходом адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности.
Каждый из выходов элементов антенной решетки 1 соединен с соответствующими первыми входами (N×D) элементов 5. На каждый из управляемых входов (N×D) элементов 5 подключены соответствующие (N×D) выходы адаптивного процессора 3. Каждый из выходов элементов 5 соединен с отдельными соответствующими (N×D) входами адаптивного процессора 3.
Работа адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, состоит в следующем.
При поступлении помехи на вход адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, на выходе элементов антенной решетки 1 на временном интервале усреднения при вычислении корреляционной матрицы помех Rxx появляются дополнительные фазовые набеги, возникающие в ходе сканирования диаграммы направленности. Адаптивный процессор 3, используя известные параметры сканирования диаграммы направленности, формирует управляющие сигналы для элементов 5, в которых компенсируются фазовые набеги, возникающие в ходе сканирования диаграммы направленности. В результате этого происходит устранение данных фазовых набегов. Это приводит к тому, что корреляционная матрица помех Rxx вычисляется с учетом компенсации негативного влияния сканирования диаграммы направленности, что позволяет сформировать провал в диаграмме направленности до нулевого значения, как и в статичном случае.
Достижение провала до нулевого значения в диаграмме направленности обеспечено тем, что в каждый момент времени на интервале усреднения появляющийся фазовый набег компенсируется с помощью соответствующих элементов 5. Графическая иллюстрация работы адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, в этом случае совпадает с графиками, приведенными на фиг.3.
В этой ситуации при сканирующей диаграмме направленности уровень провала в направлении на источник помех в диаграмме направленности такой же, как и в диаграмме направленности при отсутствии сканирования.
Проведем аналитический анализ полученных результатов на примере (m,n) элемента корреляционной матрицы помех Rxx. В условиях сканирования диаграммы направленности для адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, на интервале усреднения, (m,n) элемент корреляционной матрицы помех Rxx будет в соответствии с формулой (2) иметь вид

где  - значение компенсационного множителя для помехи, принятой m-м элементом антенной решетки 1 в момент времени ti;
- значение компенсационного множителя для помехи, принятой m-м элементом антенной решетки 1 в момент времени ti;
 - значение компенсационного множителя для помехи, принятой n-м элементом антенной решетки 1 в момент времени ti.
- значение компенсационного множителя для помехи, принятой n-м элементом антенной решетки 1 в момент времени ti.
Остальные обозначения совпадают с обозначениями, раскрытыми после формулы (3).
Вынесенные за знак суммы множители оказались в результате независимыми от временного отсчета i, т.е. являются константами на интервале усреднения. Физический смысл данного замечания состоит в том, что направление источника помехи за временной интервал усреднения не изменилось и сформированные весовые коэффициенты Wopt по формуле (1) позволят создать провал в диаграмме направленности адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, до нулевого значения.
Детальное описание работы адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, состоит в следующем.
При поступлении электромагнитного поля на вход адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности, с выхода N элементов антенной решетки 1 на входы N элементов весовых коэффициентов 2 и входы (N×D) элементов 5 поступает помеха X.
Отрезок времени, необходимый для вычисления корреляционной матрицы помех Rxx с целью дальнейшего формирования весовых коэффициентов Wopt, представим множеством временных отсчетов {t1,t2,...,tL}. В момент времени t1 c выходов (N×D) элементов 5 D векторов помех X, соответствующие D различным источникам, поступают на отдельные соответствующие (N×D) входы адаптивного процессора 3, в котором вычисляется корреляционная матрица Rxx(t1) на момент времени t1 по формуле (2).
В момент времени t2 на входы (N×D) элементов 5 поступает входной сигнал в виде вектора помехи Х с фазовым набегом, вызванным сканированием диаграммы направленности за интервал времени t2-t1. В адаптивном процессоре 3 имеется информация о фазовых набегах на множестве временных отсчетов {t1,t2,...,tL}, по которой адаптивный процессор 3 формирует со своих (N×D) выходов управляющие сигналы, поступающие на управляющие входы (N×D) элементов 5, устраняющих образованные сканированием диаграммы направленности фазовые набеги за интервал времени t2-t1. С выхода (N×D) элементов 5 информация в виде напряжений поступает на соответствующие (N×D) входы адаптивного процессора 3, в котором вычисляется корреляционная матрица Rxx(t2) на момент времени t2 по формуле (2).
Аналогично можно показать работу и в другие моменты времени.
Таким образом, в результате указанных действий вычисляется корреляционная матрица по формуле (2), но с особенностями применения компенсации, показанной в формуле (5) для одного элемента корреляционной матрицы помех Rxx.
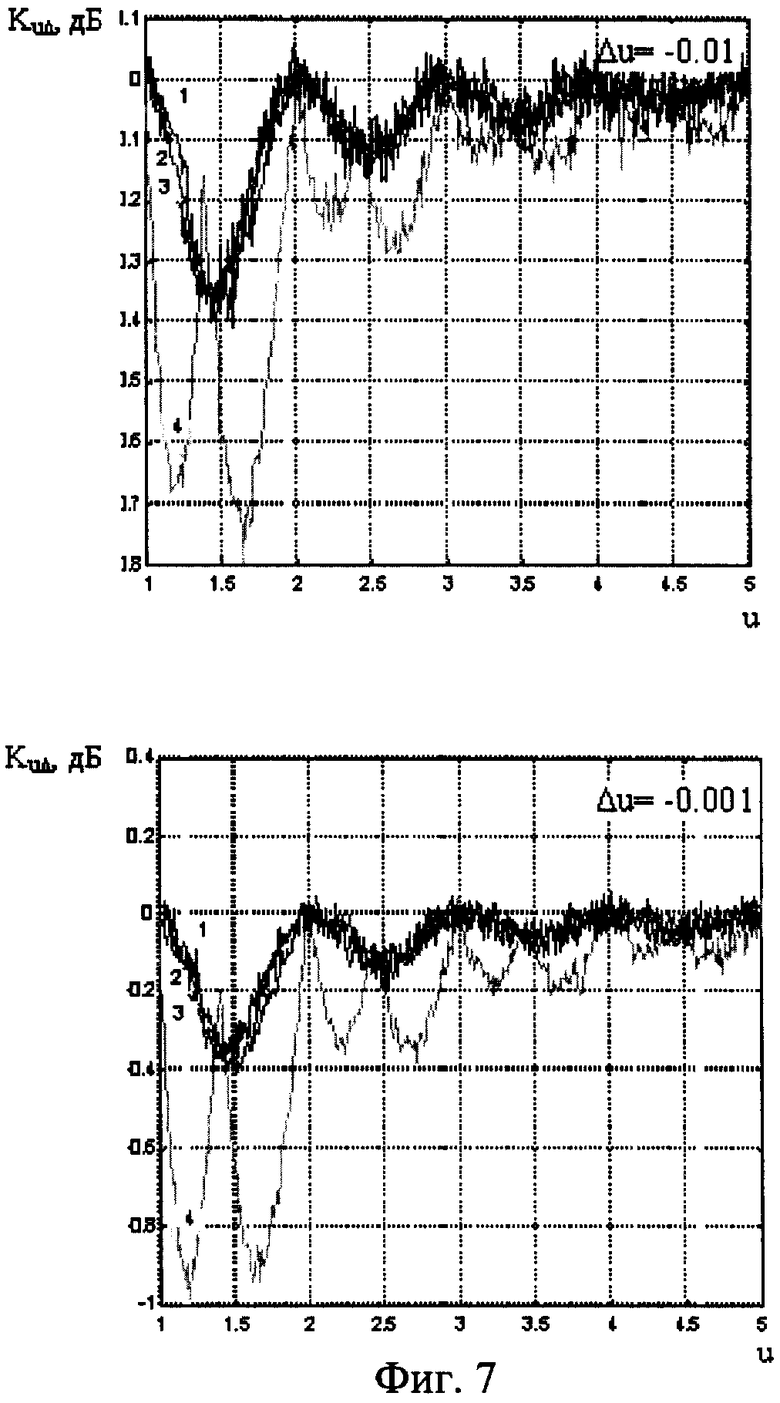
На фиг.7 показаны зависимости коэффициента использования энергии от углового параметра по результатам моделирования работы адаптивной антенной решетки, компенсирующей результат сканирования диаграммы направленности. По оси ординат коэффициент использования энергии, измеряемый в дБ, обозначен КuΔ, дБ. По оси абсцисс буквой u обозначен безразмерный угловой параметр. Обозначены величины угловых смещений, вызванных сканированием диаграммы направленности: Δu=-0.01 и Δu=-0.001. Кривые, обозначенные цифрой 1, соответствуют воздействию помехи, превышающей собственные шумы на 20 дБ, цифрой 2 на 30 дБ, цифрой 3 на 40 дБ и цифрой 4 на 50 дБ.
Результаты моделирования доказывают, что увеличение углового рассогласования, вызванного сканированием диаграммы направленности при прочих равных условиях, не вызывает ухудшения эффективности пространственного подавления помех. Например, для помехи, характеризующейся уровнем 20 дБ, что соответствует кривой, обозначенной цифрой 1, снижение эффективности пространственного подавления при рассогласовании Δu=-0.001 и при рассогласовании Δu=-0.01 не превышает 1,5 дб, что значительно меньше, чем в случае, рассмотренном в фиг.5.
Литература
1. Мозинго М.А., Миллер Т.У. Адаптивные антенные решетки. Введение в теорию. - М., Радио и связь, 1986.
2. Щесняк С.С., Попов М.П. Адаптивные антенны. - СПб.: ЛВИКА им. А.Ф.Можайского, 1995.
3. С.М.Рытов, Ю.А.Кравцов, В.И.Татарский. Введение в статистическую радиофизику. Ч.1. Случайные процессы. - М.: Наука, 1978.
4. Радиоэлектронные системы. Основы построения и теория. Справочник / Под ред. Я.Д.Ширмана. - М.: ЗАО «МАКВИС», 1998.
5. Алмазов В.Б., Манжос В.Н. Получение и обработка радиолокационной информации. - Харьков: ВИРТА ПВО, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 2008 |
|
RU2366047C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УСЛОВИЯХ МНОГОЛУЧЕВОСТИ | 1997 |
|
RU2141675C1 |
| Способ пространственно-временной обработки радиосигналов для компенсации помех | 2024 |
|
RU2836610C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА ДЛЯ ПАНОРАМНОГО РАДИОПРИЕМНИКА | 2005 |
|
RU2291458C1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1994 |
|
RU2090960C1 |
| АДАПТИВНАЯ АНТЕННАЯ СИСТЕМА | 1995 |
|
RU2099837C1 |
| СПОСОБ ПЕЛЕНГАЦИИ УЗКОПОЛОСНЫХ РАДИОСИГНАЛОВ КВ ДИАПАЗОНА | 2009 |
|
RU2407026C1 |
| Адаптивная антенная система для панорамного радиоприемника | 2018 |
|
RU2679486C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ МНОГОЛУЧЕВОЙ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ СПЕКТРА ПРОСТРАНСТВЕННЫХ ЧАСТОТ ВХОДНОГО СИГНАЛА | 2017 |
|
RU2650096C1 |
Изобретение относится к области приема и обработки информации в условиях воздействия помех и, в частности, к радиолокации. Техническим результатом является повышение эффективности пространственного подавления помех. Адаптивная антенная решетка, компенсирующая результат сканирования, содержит N элементов антенной решетки, элементы весовых коэффициентов, адаптивный процессор, сумматор, при этом дополнительно введены N×D элементов весовых коэффициентов компенсации результатов сканирования диаграммы направленности, где D - количество возможных источников помех. 7 ил.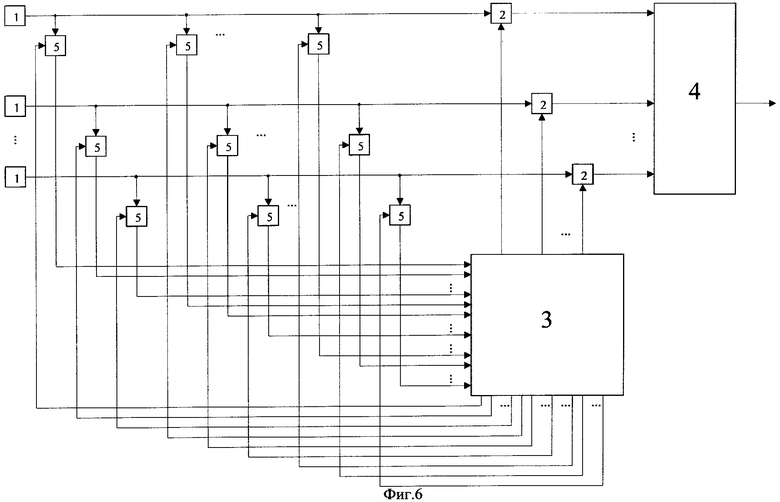
Адаптивная антенная решетка, компенсирующая результат сканирования, входом которой являются N элементов антенной решетки, каждый из выходов которых соединен с соответствующими элементами весовых коэффициентов, причем к каждому из управляемых входов элементов весовых коэффициентов подключен соответствующий выход адаптивного процессора, формирующего весовые коэффициенты, обеспечивающие формирование в диаграмме направленности провала до нулевого значения в направлении на источник помех, а выходы элементов весовых коэффициентов являются соответствующими входами сумматора, являющегося выходом устройства, отличающаяся тем, что дополнительно к выходу элементов антенной решетки подключены (N×D) элементов весовых коэффициентов компенсации результатов сканирования диаграммы направленности, где D - количество возможных источников помех, причем на каждый из управляемых входов этих элементов подключены соответствующие выходы адаптивного процессора, а каждый из выходов элементов весовых коэффициентов компенсации результатов сканирования диаграммы направленности соединен с соответствующими входами адаптивного процессора, который также формирует управляющие сигналы для элементов весовых коэффициентов компенсации результатов сканирования диаграммы направленности, в которых компенсируются фазовые набеги, возникающие в ходе сканирования диаграммы направленности.
| ЩЕСНЯК С.С | |||
| и др | |||
| Адаптивные антенны | |||
| СПб.: ЛВИКА им | |||
| А.Ф.Можайского, 1995, с.338, рис.5.10 | |||
| Адаптивная антенная решетка для систем связи с псевдослучайной перестройкой рабочей частоты | 1990 |
|
SU1786456A1 |
| АДАПТИВНАЯ АНТЕННАЯ РЕШЕТКА | 1991 |
|
RU2014680C1 |
| Устройство для сборки пластин коллектора в технологическое кольцо | 1977 |
|
SU684660A1 |
| US 5771439 A, 23.06.1998 | |||
| US 6289062 A, 11.09.2001. | |||

