ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к навигационной системе и, в частности, к способу и устройству управления на перекрестке, позволяющим эффективно формировать стрелку, показывающую направление поворота на перекрестке.
Предшествующий уровень техники
[0002] Различные виды транспорта, такие как суда, самолеты и автомобили, широко используют навигационную систему или спутниковую систему определения местоположения (далее - GPS), устанавливаемую на них для контроля их текущего местоположения и скорости движения или для определения маршрута их движения.
[0003] За последнее время рост научно-исследовательских и опытно-конструкторских работ по созданию аппаратуры для транспортных средств привел к появлению на рынке различных изделий.
[0004] В частности, была создана полнофункциональная навигационная система, в которой местоположение транспортного средства отображается на карте, чтобы направить таким образом транспортное средство по рекомендуемому маршруту. Согласно полнофункциональной навигационной системе текущее местоположение транспортного средства вычисляют с использованием информации, получаемой со спутника GPS и затем отображаемой на карте.
[0005] Кроме того, полнофункциональная навигационная система предоставляет водителю различную информацию, необходимую для вождения транспортного средства, такую, например, как направление движения транспортного средства, расстояние до пункта назначения, текущая скорость транспортного средства, маршрут, ранее выбранный водителем, оптимальный маршрут до пункта назначения и т.д.
[0006] Полнофункциональная навигационная система принимает радиосигнал с указанием широты, долготы и высоты относительно спутника GPS, вычисляет текущее местоположение транспортного средства и визуально или с помощью звукового оповещения обеспечивает водителя картографической информацией, включая текущее местоположение транспортного средства.
[0007] Обычно полнофункциональная навигационная система снабжена приемником GPS для приема радиоволны со спутника GPS и вычисления координат текущего местоположения, блоком датчиков, включающим гироскопический датчик и датчик скорости для определения угла поворота и скорости каждого транспортного средства, а также блоком памяти для хранения картографических данных.
[0008] Однако, поскольку полнофункциональная навигационная система согласно известным средствам отображает лишь местоположение транспортного средства на цифровой карте, воспроизводимой на экране, водитель, не имеющий опыта чтения карт или не умеющий быстро прочитать карту, затрудняется с нахождением заданного пункта назначения.
[0009] Кроме того, сосредоточенность водителя на вождении ослабляется из-за сложных манипуляций, что приводит к авариям.
[0010] Вместе с тем, кроме полнофункциональной навигационной системы на рынке появилась навигационная система с ведением по последовательным поворотам, управляющая маршрутом последовательно, от поворота к повороту.
[0011] Основной и важной функцией графического пользовательского интерфейса (ГПИ) при управлении маршрутом является обеспечение стрелки, показывающей направление.
[0012] Обычное управление маршрутом осуществляют, используя изображения стрелок "прямо", "левый поворот", "правый поворот" и "разворот". Однако данный способ себя не оправдывает в ситуациях реальных дорог, пересекающихся под различными углами.
[0013] В частности, если используют только простое изображение направляющей стрелки для управления на перекрестке с малыми углами между дорогами, то водитель может запутаться еще больше, потому что не отличит требуемую дорогу от других.
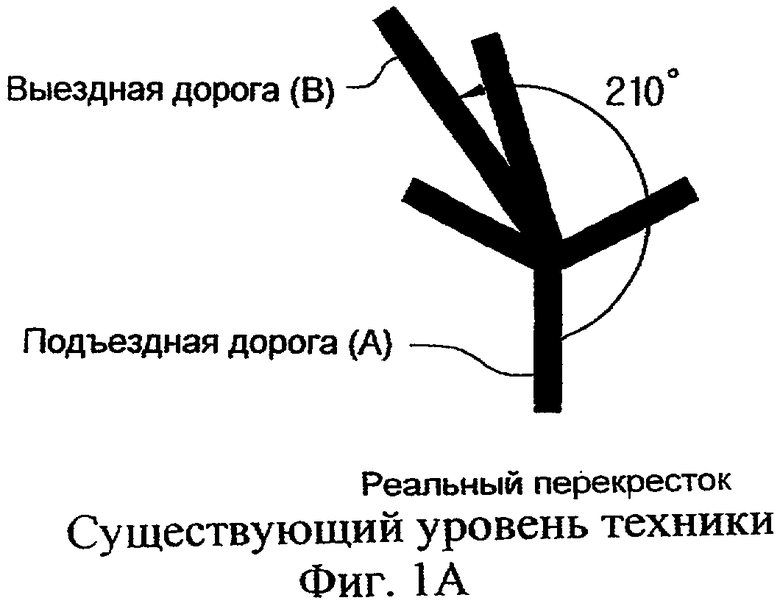
[0014] На фиг.1А-1C представлены примерные изображения направляющих стрелок для подъездной дороги к перекрестку с густой сетью пересекающихся дорог в обычной навигационной системе с ведением по последовательным поворотам.
[0015] На фиг.1А показана простая схема реального перекрестка, где все дороги соединяются с подъездной дорогой, по которой приближается транспортное средство. Показано, что дороги соединяются с подъездной дорогой под различными углами, причем углы между требуемой выездной дорогой и соседними дорогами малы.
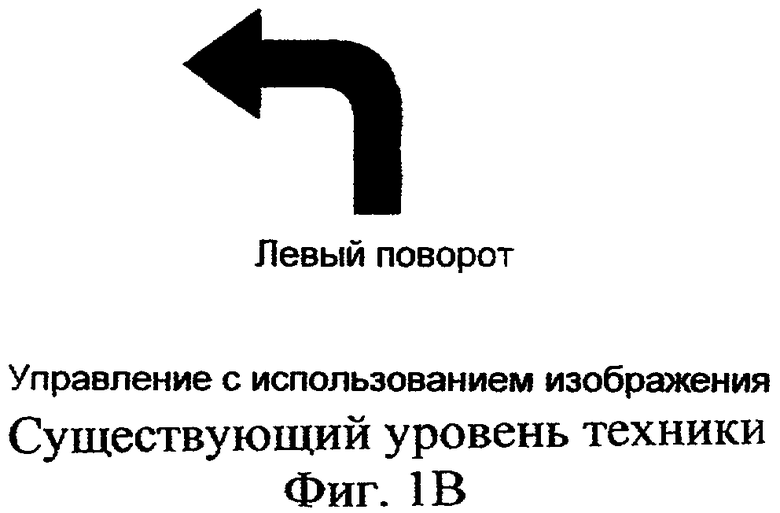
[0016] Следовательно, как показано на фиг.1В, в случае, когда обычная навигационная система с ведением по последовательным поворотам осуществляет управление на перекрестке при использовании только сохраненных изображений стрелок "прямо", "левый поворот", "правый поворот" и "разворот", то водитель может попасть не на требуемую выездную дорогу, а на одну из соседних дорог перекрестка, поскольку изображение стрелки не совпадает с требуемой выездной дорогой. Иными словами, как показано на фиг.1А, дороги, подходящие к подъездной дороге, к которой приближается транспортное средство, простираются по четырем направлениям, а требуемая выездная дорога расположена под углом около 210° к подъездной дороге в направлении против часовой стрелки. Следовательно, как показано на фиг.1В, в случае указания дороги с использованием изображения простой стрелки стрелка "левый поворот", которая более всего походит на требуемую выездную дорогу, используется для указания направления на требуемую выездную дорогу.
[0017] В данном случае, однако, водитель может перепутать поворот, поскольку изображение требуемой выездной дороги очень отличается от изображения стрелки.
[0018] Даже если обычная навигационная система с ведением по последовательным поворотам хранит различные изображения стрелок для использования во многих возможных случаях, невозможно представить точные изображения всех реальных перекрестков, так как существует ограничение в осуществлении управления на перекрестке, накладываемое характеристикой информационного терминала транспортного средства.
[0019] Кроме того, обычная навигационная система с ведением по последовательным поворотам очень неэффективна, поскольку способ показа изображения поворота для направления транспортного средства на выездную дорогу на перекрестке требует большого объема памяти.
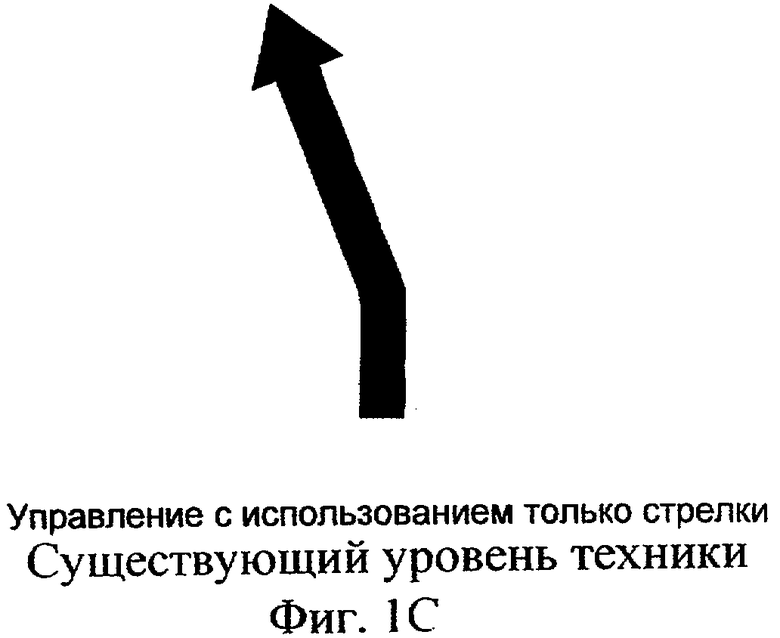
[0020] Предполагается, что стрелка на фиг.1C может представлять произвольный угол. В этом случае при отображении направляющей стрелки с произвольным углом водитель может неправильно определить требуемую выездную дорогу, если соединяющиеся подъездная и выездная дороги находятся на близком расстоянии одна от другой.
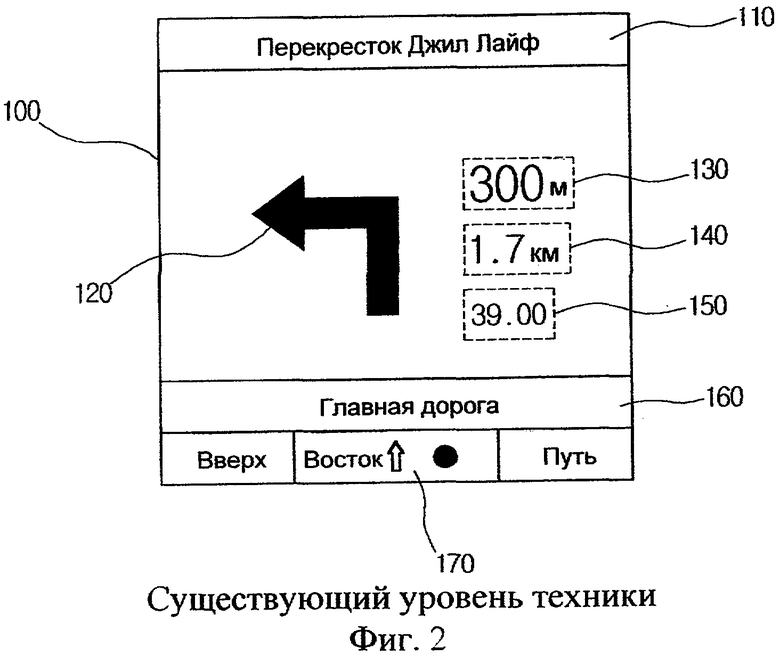
[0021] На фиг.2 показан примерный вид представления дорожной информации в обычной навигационной системе, которая формирует только направляющую стрелку поворота на перекрестке для направления транспортного средства на рекомендуемый маршрут.
[0022] Если водитель, используя навигационную систему, выбирает представление дорожной информации и вводит требуемый пункт назначения, то отображаются стрелка и другая дорожная информация для направления водителя к требуемому пункту назначения.
[0023] Название и направление 110 перекрестка, например перекресток ДЖИЛ ЛАЙФ, отображают в верхней части экрана 100 навигационной системы, а изображение направляющей стрелки поворота 120 на перекрестке - в средней части. Оставшееся расстояние до точки разветвления перекрестка 130, оставшееся расстояние до заданного пункта назначения 140 и время 150, необходимое для прибытия в пункт назначения, отображают справа от направляющей стрелки поворота 120 на перекрестке. Название дороги 160 и направление движения / получение сигнала от GPS 170 отображают в нижней части экрана 100.
[0024] Однако, если согласно навигационной системе вышеуказанной конструкции направление поворота к пункту назначения на перекрестке отображают с использованием изображения стрелки, водитель может запутаться при определении требуемой выездной дороги на перекрестке из-за значительного различия между изображением стрелки и реальной выездной дорогой.
[0025] Кроме того, хотя изображения направляющих стрелок, соответствующие реальным перекресткам, и хранятся для использования во многих возможных случаях, навигационная система сталкивается с проблемой, которая состоит в том, что ее функциональные возможности ограничены ее характеристиками.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0026] Соответственно, настоящее изобретение относится к способу и устройству управления на перекрестке, которые по существу устраняют одну или более проблем, вызванных ограничениями и недостатками известных средств.
[0027] Целью настоящего изобретения является создание способа и устройства управления на перекрестке в навигационной системе, которые позволяют эффективно и быстро формировать стрелку при приближении транспортного средства к подъездной дороге.
[0028] Другой целью настоящего изобретения является создание способа и устройства управления на перекрестке в навигационной системе, которые позволяют улучшить наглядность путем представления упрощенного изображения перекрестка вместе со стрелкой, имеющей произвольный угол.
[0029] Дополнительно преимущества, цели и признаки изобретения будут частью изложены в описании, которое приводится ниже, а частью будут ясны специалистам после изучения нижеследующего или после практического применения настоящего изобретения. Цели и другие преимущества изобретения могут быть реализованы и достигнуты в конструкции, особо выделенной в описании и формуле изобретения, а также в прилагаемых чертежах.
[0030] Согласно предпочтительному примеру осуществления настоящего изобретения способ управления на перекрестке включает следующие операции: проверку схемы перекрестка для формирования заданного перекрестка на основе информации о местоположении транспортного средства; формирование направляющей стрелки поворота, отображаемой на перекрестке; и одновременное отображение перекрестка и направляющей стрелки поворота, сформированной на нем.
[0031] Операция формирования заданного перекрестка включает следующие шаги: вычисление угла подхода подъездной дороги, по которой приближается транспортное средство, углов отхода расходящихся выездных дорог, соединяющихся с подъездной дорогой, и углов между подъездной дорогой и расходящимися выездными дорогами относительно заданного направления; расположение подъездной дороги по вертикали; и представление расходящихся выездных дорог в соответствии с вычисленными углами между подъездной дорогой и выездными дорогами, взятыми относительно подъездной дороги, расположенной по вертикали.
[0032] Операция формирования направляющей стрелки поворота включает следующие шаги: компоновка базовой стрелки, причем базовая стрелка состоит из нижнего элемента, центрального кружка, верхнего элемента и острия; вычисление угла поворота с использованием угла между подъездной дорогой и выбранной выездной дорогой, если транспортным средством управляют путем выбора одной из выездных дорог; и поворот верхнего элемента и острия согласно вычисленному углу вращения.
[0033] Согласно другому примеру осуществления настоящего изобретения устройство управления на перекрестке включает средство проверки схемы перекрестка для формирования заданного перекрестка на основе информации о местоположении транспортного средства; средство формирования направляющей стрелки поворота, отображаемой на перекрестке; и средство одновременного отображения перекрестка и направляющей стрелки поворота, сформированной на нем.
[0034] Согласно еще одному примеру осуществления настоящего изобретения навигационная система включает средство хранения данных, необходимых для формирования перекрестка; средство хранения данных базовой стрелки; запоминающее устройство для хранения координаты стрелки, показывающей направление, и таблицы тригонометрических функций; центральный процессор для управления на перекрестке с помощью направляющей стрелки поворота при использовании данных, необходимых для формирования перекрестка, данных базовой стрелки и таблицы тригонометрических функций; и средство отображения перекрестка с направляющей стрелкой поворота, при этом центральный процессор включает средство проверки схемы перекрестка для формирования заданного перекрестка на основе информации о местоположении транспортного средства, причем информация о местоположении транспортного средства извлечена из данных, необходимых для формирования перекрестка; и средство формирования направляющей стрелки поворота, отображаемой на сформированном перекрестке.
[0035] Необходимо понимать, что как вышеприведенное общее описание, так и нижеследующее подробное описание настоящего изобретения являются примерными и поясняющими и предназначены для дальнейшего объяснения настоящего изобретения в соответствии с тем, как оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0036] Чертежи, прилагаемые для более ясного понимания сущности изобретения и включенные в состав данной заявки, поясняют конкретные примеры осуществления настоящего изобретения и вместе с описанием служат для объяснения его принципов. На чертежах представлено:
[0037] на фиг.1А-1C - примерные изображения направляющих стрелок для подъездной дороги в случае, если схема перекрестка в обычной навигационной системе с ведением по последовательным поворотам является плотной;
[0038] на фиг.2 - примерный вид представления дорожной информации в обычной навигационной системе, в которой для направления транспортного средства на рекомендуемый маршрут формируют только направляющую стрелку поворота на перекрестке;
[0039] на фиг.3 - блок-схема навигационной системы с ведением по последовательным поворотам согласно настоящему изобретению;
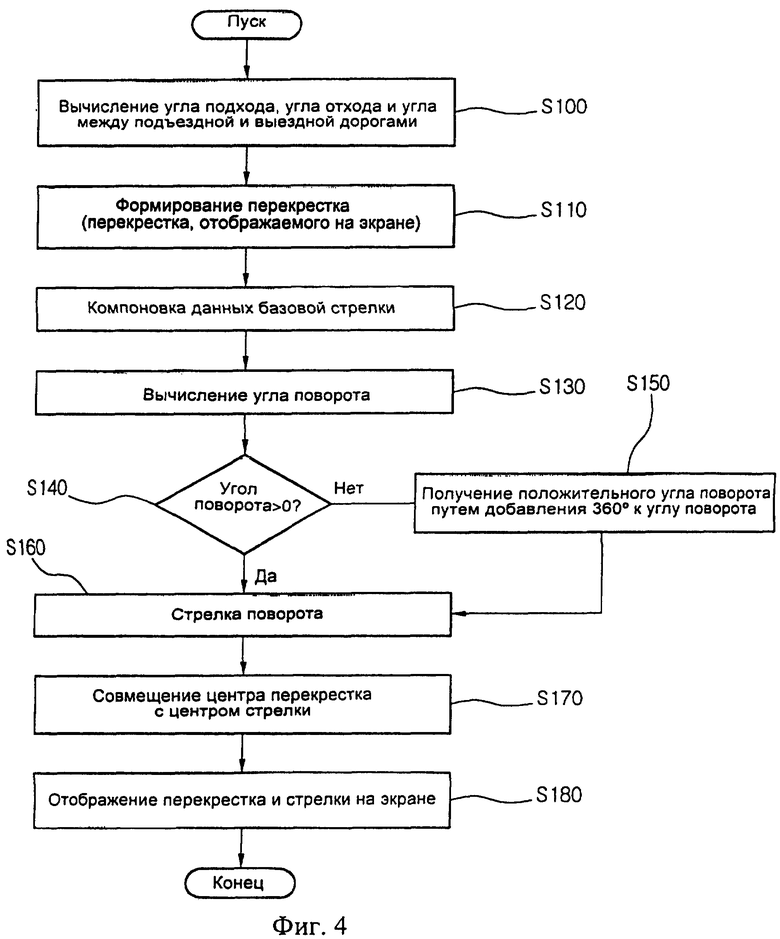
[0040] на фиг.4 - последовательность операций, отражающая способ управления на перекрестке с помощью навигационной системы с ведением по последовательным поворотам согласно предпочтительному примеру осуществления настоящего изобретения;
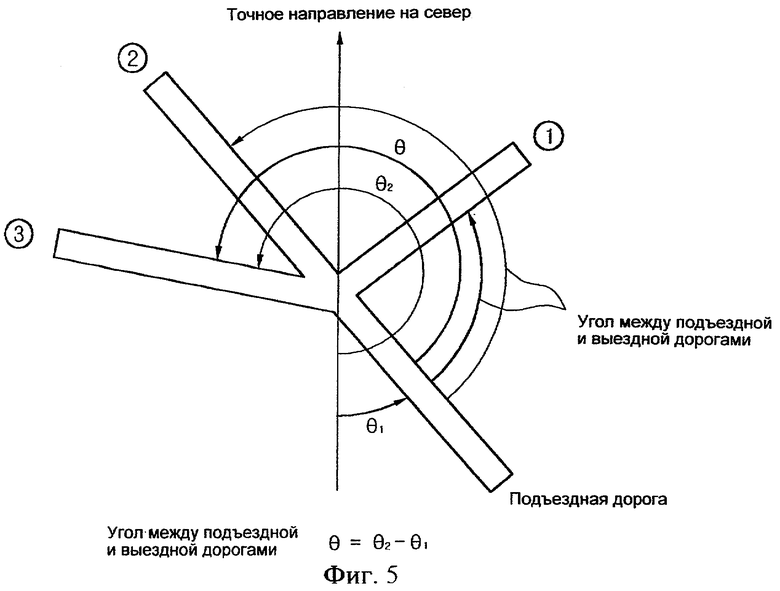
[0041] на фиг.5 - примерная иллюстрация метода вычисления углов между дорогами перекрестка;
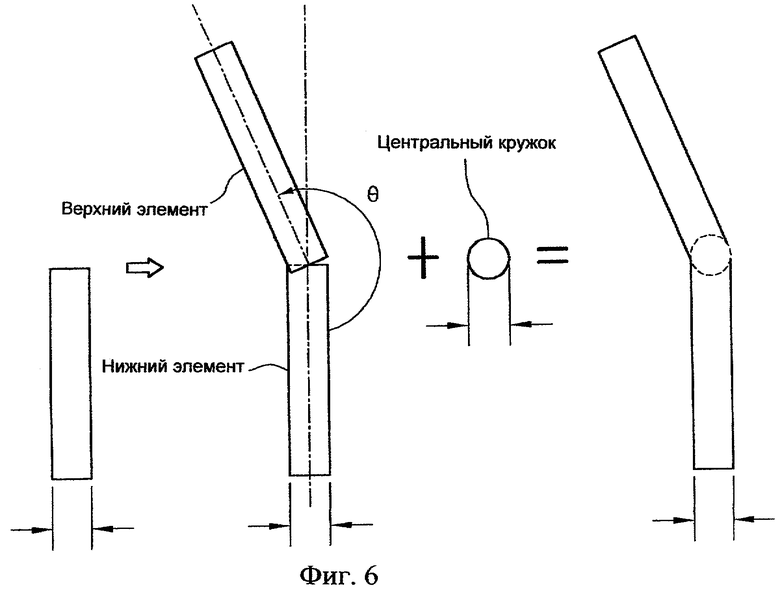
[0042] на фиг.6 - примерная иллюстрация процесса формирования перекрестка в упрощенной форме;
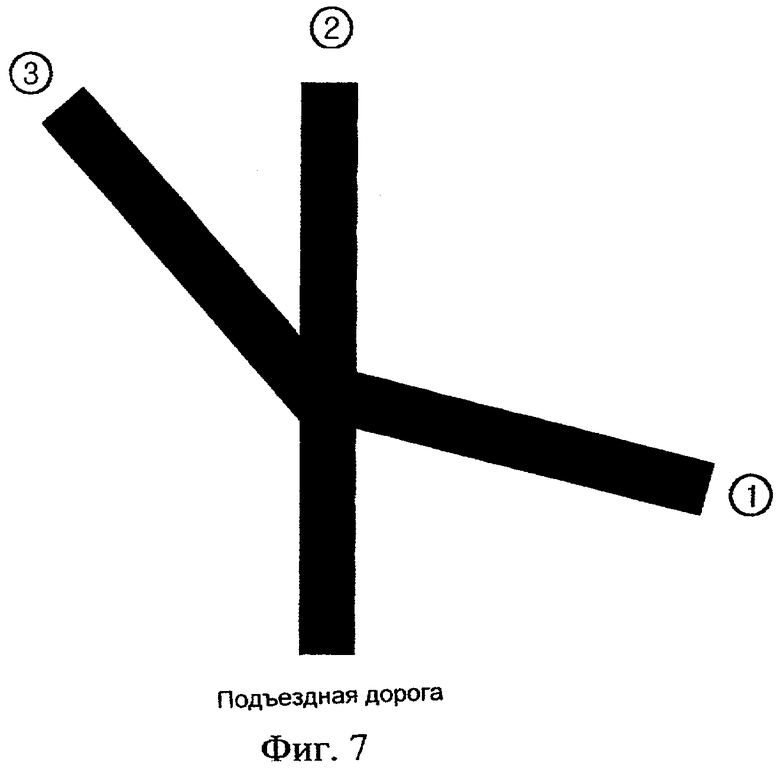
[0043] на фиг.7 - вид перекрестка, сформированного в процессе упрощения перекрестка;
[0044] на фиг.8А-8С - схемы, показывающие процесс формирования направляющей стрелки поворота;
[0045] на фиг.9 - примерный вид, в котором отображается перекресток вместе с направляющей стрелкой поворота; и
[0046] на фиг.10А-10D - примерные виды, показывающие применение различных реальных перекрестков в управлении на перекрестках согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0047] Далее будет подробно рассмотрен предпочтительный пример осуществления настоящего изобретения со ссылками на прилагаемые чертежи.
[0048] На фиг.3 представлена блок-схема, показывающая конструкцию навигационной системы с ведением по последовательным поворотам согласно настоящему изобретению.
[0049] Как показано на фиг.3, навигационная система с ведением по последовательным поворотам, выполненная в соответствии с настоящим изобретением, содержит картографическую базу данных 200 для хранения данных, необходимых для формирования перекрестка, графическую библиотеку 210 для хранения данных базовой стрелки, запоминающее устройство 220 для хранения таблицы тригонометрических функций и координаты стрелки, показывающей направление, центральный процессор 230 для формирования направляющей стрелки поворота для управления на перекрестке с использованием основной функции навигации, данных базовой стрелки и таблицы тригонометрических функций, и дисплей 240 с экраном для отображения перекрестка вместе с направляющей стрелкой поворота. Кроме того, система отслеживания местоположения 250 передает информацию о текущем местоположении на центральный процессор 230, который осуществляет прием информации о текущем местоположении с использованием данных от спутника GPS.
[0050] Подобно другим навигационным системам центральный процессор 230 определяет цель для управления на основе информации о местоположении транспортного средства, выделенной из данных, необходимых для формирования перекрестка, а также проверяет схему перекрестка для формирования заданного перекрестка, формируя таким образом направляющую стрелку поворота, отображаемую на сформированном перекрестке.
[0051] Картографическая база данных 200 хранит данные, необходимые для формирования перекрестка и получаемые от спутника GPS, например информацию о местоположении транспортного средства. Описание работы навигационной системы с ведением по последовательным поворотам, спроектированной, как описано выше, будет приведено ниже.
[0052] Центральный процессор 230 использует радиосигнал, полученный от спутника GPS через систему отслеживания местоположения 250, чтобы выделить данные, необходимые для формирования перекрестка, а затем хранит выделенные данные в картографической базе данных 200.
[0053] Теперь, если водитель вводит пункт назначения, навигационная система с ведением по последовательным поворотам указывает оптимальную дорогу, позволяющую водителю достичь пункта назначения в наикратчайшее время.
[0054] Для этого центральный процессор 230 проверяет подъездную дорогу, по которой приближается транспортное средство, и расхождение выездных дорог, соединяющихся с подъездной дорогой, с использованием данных, необходимых для формирования перекрестка.
[0055] Таким образом, если подъездную дорогу и расхождение выездных дорог проверяют для формирования перекрестка, то угол повода подъездной дороги, углы отхода выездных дорог и углы между подъездной дорогой и выездными дорогами вычисляют относительно точного направления на север. При этом подъездная дорога, углы отхода и углы между подъездной дорогой и выездными дорогами находятся в диапазоне от 0° до 360° относительно точного направления на север.
[0056] Центральный процессор 230 располагает подъездную дорогу по вертикали, а затем представляет расхождение выездных дорог относительно вертикально расположенной подъездной дороги согласно вычисленным углам между подъездной дорогой и выездными дорогами, чтобы таким образом сформировать перекресток. При этом подъездная дорога и выездные дороги могут быть представлены в соответствии со значениями тригонометрических функций, которые вычисляют по таблице тригонометрических функций, хранящейся в запоминающем устройстве 220. Соответственно, сформированный перекресток представляют в упрощенном виде.
[0057] Графическая библиотека 210 включает нижний элемент, центральный кружок, верхний элемент и острие, ширина линий которых может регулироваться, а цвета дают возможность отличать одно от другого.
[0058] Центральный процессор 230 компонует данные базовой стрелки согласно углу подхода, по которому осуществляют взаимное расположение данных базовой стрелки, представляющих собой нижний элемент, центральный кружок, верхний элемент и острие, включенные в состав графической библиотеки 210.
[0059] При этом если одну из выездных дорог выбирают и указывают в качестве кратчайшего маршрута, то вычисляют угол поворота, используя угол между подъездной дорогой и выбранной выездной дорогой. Затем данные базовой стрелки, а именно верхний элемент и острие, поворачивают в соответствии с вычисленным углом поворота для формирования таким образом направляющей стрелки поворота на перекрестке. Теперь направляющую стрелку поворота помещают на выбранную выездную дорогу из перекрестка. Направляющая стрелка поворота и все дороги перекрестка должны быть сформированы одним цветом.
[0060] Центральный процессор 230 одновременно отображает сформированный перекресток и направляющую стрелку поворота, сформированную на нем.
[0061] Далее будет описан способ управления на перекрестке в навигационной системе с ведением по последовательным поворотам, выполненной согласно вышеизложенному.
[0062] На фиг.4 представлена последовательность операций, выполняемых при осуществлении способа управления на перекрестке в навигационной системе с ведением по последовательным поворотам согласно предпочтительному примеру осуществления настоящего изобретения.
[0063] Как показано на фиг.4, схему перекрестка проверяют на основании информации о местоположении транспортного средства. Иначе говоря, проверяют подъездную дорогу, по которой приближается транспортное средство, и расхождение выездных дорог, соединяющихся с подъездной дорогой. Затем вычисляют угол подхода подъездной дороги, углы отхода выездных дорог и углы между подъездной дорогой и выездными дорогами (S100).
[0064] На фиг.5 представлена примерная схема процесса вычисления углов дорог, образующих перекресток.
[0065] Как показано на фиг.5, угол подхода θ1, угол выезда θ2 и угол θ между подъездной дорогой и выездной дорогой отсчитываются относительно точного направления на север. Вычисленные углы находятся в диапазоне от 0° до 360° в направлении против часовой стрелки.
[0066] Подъездная дорога имеет угол подхода θ1, равный 30° относительно точного направления на север против часовой стрелки, а выездные дороги ①, ② и ③ имеют углы отхода соответственно 110°, 210° и 260° относительно точного направления на север против часовой стрелки.
[0067] Следовательно, угол между подъездной дорогой и выездной дорогой ① равен приблизительно 80°, угол между подъездной дорогой и выездной дорогой ② равен приблизительно 180°, а угол между подъездной дорогой и выездной дорогой ③ равен приблизительно 230°. Другими словами, если предположить, что угол подхода дороги, по которой транспортное средство приближается, равен θ1 относительно точного направления на север, а угол отхода дороги, по которой транспортное средство выезжает, равен θ2, то угол θ между подъездной и выездной дорогами вычисляют следующим образом:
[0068] θ=θ2-θ1
[0069] В данном случае угол θ будет положительной величиной в том случае, когда угол отхода θ2 больше, чем угол подхода θ1, и угол θ будет отрицательной величиной, когда угол подхода θ1 больше, чем угол отхода θ2.
[0070] В частности, поскольку вычисленный угол θ нужен для представления перекрестка в упрощенном виде, а также для формирования направляющей стрелки поворота на перекрестке, он может храниться вместе с углом подхода и углом отхода.
[0071] Затем после расположения подъездной дороги вертикально расхождение выездных дорог представляют относительно вертикально расположенной подъездной дороги согласно вычисленному углу θ для формирования таким образом одного перекрестка (S110). Теперь сформированный перекресток можно отобразить на экране.
[0072] При представлении расхождения выездных дорог получают значение тригонометрической функции угла θ с помощью таблицы тригонометрических функций и расхождение выездных дорог поворачивают в соответствии со значением тригонометрической функции.
[0073] На фиг.6 представлена примерная схема процесса формирования перекрестка в упрощенном виде.
[0074] Как показано, при управлении на перекрестке с помощью навигационной системы с ведением по последовательным поворотам направление указывают при вертикальном расположении подъездной дороги, и это используется в качестве эталона при представлении других дорог. Иначе говоря, подъездную дорогу с заданным углом относительно точного направления на север располагают по вертикали, а каждую дорогу представляют, используя углы между подъездной дорогой и каждой другой дорогой.
[0075] При этом ширина каждой дороги идентична, и каждую дорогу представляют в виде прямых линий, каждая из которых имеет заданную ширину для минимизации числа точек (координат), то есть каждая прямая линия имеет начальную и конечную точки.
[0076] Прежде всего, подъездную дорогу располагают по вертикали, а выездную дорогу поворачивают на угол θ вокруг центра перекрестка.
[0077] Начальную точку прямой линии, имеющей некоторую ширину и представляющей подъездную дорогу, совмещают с центром перекрестка, и конечную точку прямой линии, имеющей некоторую ширину и представляющей выездную дорогу, совмещают с центром перекрестка. Затем для получения значения координаты тригонометрической функции угла между подъездной и выездной дорогами используют таблицу тригонометрических функций, хранящуюся в запоминающем устройстве 220. Координату начальной точки выездной дороги передвигают согласно полученному значению координаты. Теперь, поскольку начальная и конечная точки подъездной дороги или начальная и конечная точки выездной дороги являются относительными понятиями, они могут взаимно заменяться и поворачиваться.
[0078] Промежуток между подъездной дорогой и выездной дорогой, возникающий при повороте, заполняют, размещая кружок с диаметром, идентичным ширине дороги, в центр перекрестка.
[0079] Таким образом, перекресток может быть сформирован выездными дорогами ① и ②, поворачиваемыми на углы между подъездной дорогой и выездными дорогами.
[0080] На фиг.7 представлен перекресток, который полностью сформирован в результате процесса упрощения.
[0081] Как показано, выездные дороги ①, ② и ③ повернуты против часовой стрелки относительно вертикально направленной подъездной дороги так, что они получаются разнесенными за счет углов между подъездной дорогой и каждой другой дорогой. В то же время цвет каждой дороги идентичен цвету центрального кружка перекрестка.
[0082] Затем данные базовой стрелки, включающие в себя нижний элемент, центральный кружок, верхний элемент и острие, располагают в направлении подъездной дороги (S120). Конечную точку верхнего элемента совмещают с начальной точкой нижнего элемента. Кроме того, центр центрального кружка, размер которого идентичен ширине верхнего и нижнего элементов, совмещают с центром данных базовой стрелки, чтобы промежуток, образующийся при повороте, мог быть заполнен.
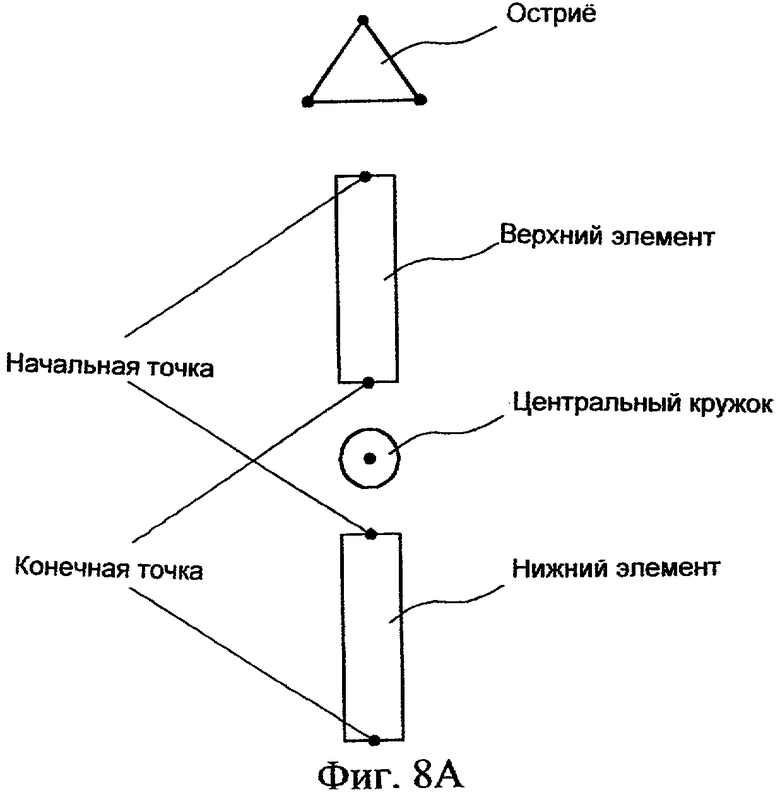
[0083] На фиг.8А-8С представлены иллюстрации к процессу формирования направляющей стрелки поворота.
[0084] На фиг.8А показан каждый элемент данных базовой стрелки. Данные базовой стрелки включают острие, верхний элемент, нижний элемент и центральный кружок. При этом с целью минимизации числа точек, используемых для поворота, верхний и нижний элементы, которые являются прямыми линиями заданной ширины, представлены с использованием только начальной и конечной точек. Центральный кружок имеет диаметр, идентичный ширине прямых линий, которые образуют верхний элемент и нижний элемент. Острие представлено треугольником с тремя точками.
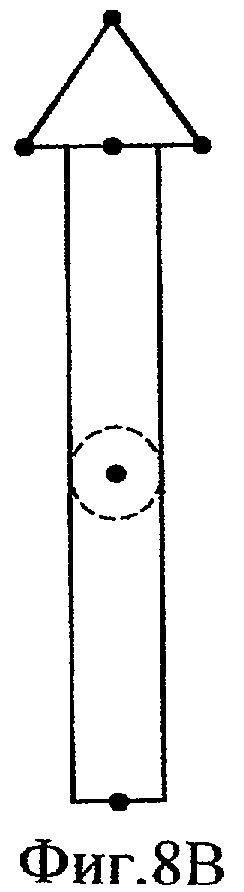
[0085] Таким образом, как показано на фиг.8В, конечную точку верхнего элемента и начальную точку нижнего элемента совмещают одну с другой, а центр нижней стороны треугольника совмещают с начальной точкой верхнего элемента. Кроме того, центр данных базовой стрелки совмещают с центром центрального кружка, имеющего диаметр, идентичный ширине как верхнего, так и нижнего элементов, так что промежуток, образующийся при повороте, может быть заполнен.
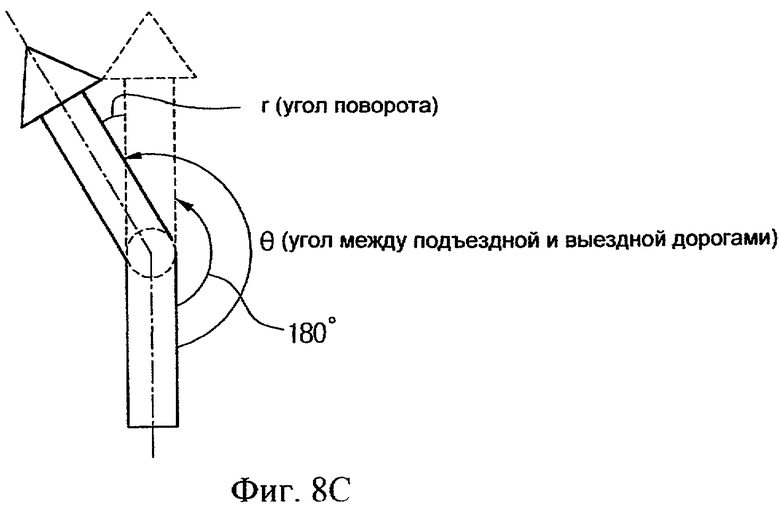
[0086] Если данные базовой стрелки расположены соответственно направлению подъездной дороги, угол поворота r вычисляют, используя угол θ относительно требуемой выездной дороги (S130). Поскольку данные базовой стрелки, представленные на фиг.8В, находятся в состоянии, когда верхний элемент уже повернут на 180°, угол поворота r может быть углом, полученным путем вычитания 180° из угла θ относительно требуемой выездной дороги. Например, если угол θ между подъездной дорогой и требуемой выездной дорогой ③ равен 230°, то угол поворота может быть равен 50°, что получено согласно (230°-180°). Таким образом, верхний элемент и острие из данных базовой стрелки поворачивают относительно их первоначального положения на 50° против часовой стрелки.
[0087] Тем временем определяют, является ли вычисленный угол поворота положительным (S140). Если угол поворота является отрицательным, то к вычисленному углу поворота добавляют 360°, чтобы таким образом отрицательный угол поворота сделать положительным. Иными словами, все вычисленные углы поворота должны быть положительными. При обращении к таблице тригонометрических функций "углы" используют в качестве индекса. В пределах от 0° до 360° эти углы должны быть положительными.
[0088] Верхний элемент и острие из данных базовой стрелки поворачивают соответственно вычисленному углу поворота (S160).
[0089] На фиг.8С представлена направляющая стрелка поворота на перекрестке в законченном виде. Как показано, верхний элемент и острие повернуты на угол поворота r против часовой стрелки, а нижний элемент направляющей стрелки поворота совмещен с направлением подъездной дороги. Верхний элемент и острие совмещены с направлением требуемой выездной дороги. Необходимо, чтобы острие, верхний элемент, центральный кружок и нижний элемент, образующие направляющую стрелку поворота, были одинакового цвета.
[0090] Затем центр сформированной направляющей стрелки поворота совмещают с центром сформированного перекрестка (S170).
[0091] В то же самое время на экране отображают перекресток с направляющей стрелкой поворота (S180).
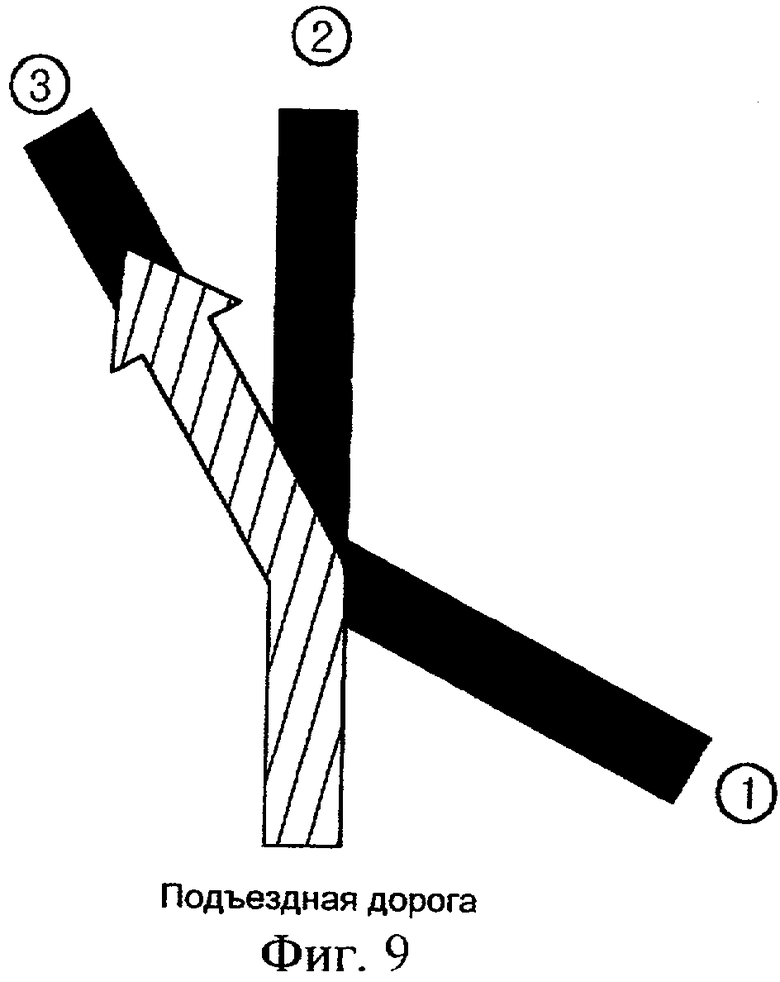
[0092] На фиг.9 представлен примерный вид отображаемого перекрестка с направляющей стрелкой поворота.
[0093] Подъездная дорога к перекрестку и нижний элемент направляющей стрелки поворота должны быть совмещены друг с другом. "Совмещение" не означает совмещения ширины и длины, а означает, что нижний элемент направляющей стрелки поворота смещают по вертикальной линии, подобно подъездной дороге, которую совмещают с вертикальной линией, а начальную точку нижнего элемента (т.е. центр направляющей стрелки поворота) совмещают с центром перекрестка. Кроме того, цвет перекрестка должен совпадать с цветом направляющей стрелки поворота.
[0094] В навигационной системе с ведением по последовательным поворотам, выполненной согласно настоящему изобретению, направляющая стрелка поворота может определять маршрут с приближением к требуемому выезду, позволяя, таким образом, водителю правильно вести транспортное средство к пункту назначения.
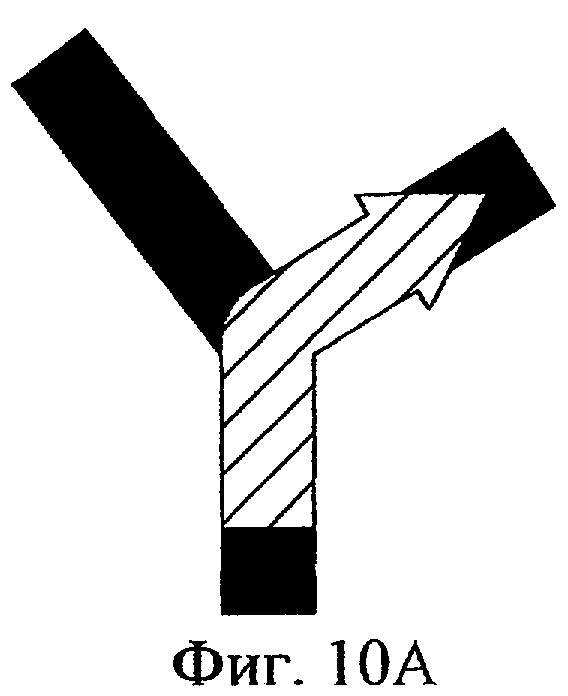
[0095] На фиг.10А-10D показано применение различных реальных перекрестков в управлении на перекрестке согласно настоящему изобретению.
[0096] На фиг.10А показан первый пример управления на перекрестке согласно навигационной системе с ведением по последовательным поворотам, выполненной по настоящему изобретению, когда транспортное средство приближается и поворачивает вправо на развилке. Как показано, направляющая стрелка поворота указывает, что транспортное средство должно повернуть вправо в направлении северо-восточной выездной дороги приблизительно на 120° от подъездной дороги против часовой стрелки.
[0097] На фиг.10В показан второй пример управления на перекрестке согласно навигационной системе с ведением по последовательным поворотам в соответствии с настоящим изобретением, когда транспортное средство приближается и поворачивает влево на развилке. Как показано, направляющая стрелка поворота указывает, что транспортное средство должно повернуть влево в направлении юго-западной выездной дороги приблизительно на 290° от подъездной дороги против часовой стрелки.
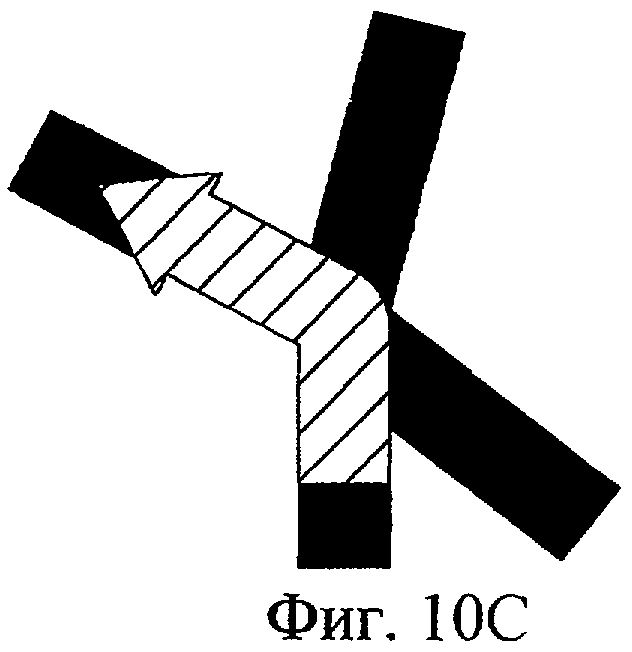
[0098] На фиг.10С показан третий пример управления на перекрестке согласно навигационной системе с ведением по последовательным поворотам в соответствии с настоящим изобретением, когда транспортное средство приближается и поворачивает влево на перекрестке. Как показано, направляющая стрелка поворота указывает, что транспортное средство должно повернуть влево в направлении северо-западной выездной дороги приблизительно на 230° от подъездной дороги против часовой стрелки.
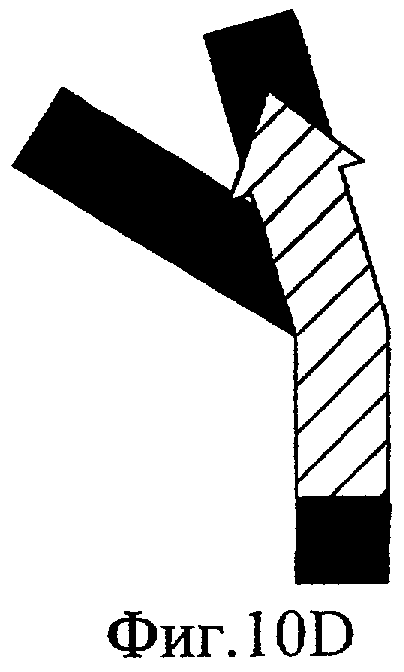
[0099] На фиг.10D показан четвертый пример управления на перекрестке согласно навигационной системе с ведением по последовательным поворотам в соответствии с настоящим изобретением, когда транспортное средство приближается и поворачивает на развилке наискосок влево. Как показано, обе выездные дороги, соединяющиеся с подъездной дорогой, расположены вплотную одна к другой. Направляющая стрелка поворота указывает, что транспортное средство должно повернуть наискосок влево в направлении северо-западной выездной дороги приблизительно на 190° от подъездной дороги против часовой стрелки.
[00100] Подобно различным видам перекрестков (например, развилка или пересечение дорог), показанным на фиг.10А-10D, в действительности могут существовать перекрестки дорог с разными углами пересечения. Кроме того, можно значительно улучшить наглядность путем одновременного отображения направляющей стрелки поворота на многоугольном перекрестке с высокой степенью визуализации и упрощенной формы реального перекрестка.
[00101] Как указывалось выше, согласно способу и устройству управления на перекрестке в навигационной системе, формируют перекресток и отображают его вместе с направляющей стрелкой поворота при направлении транспортного средства к пункту назначения, обеспечивая, таким образом, водителя руководством с улучшенной наглядностью, позволяющим транспортному средству правильно поворачивать.
[00102] Согласно способу и устройству управления на перекрестке в навигационной системе по настоящему изобретению при формировании направляющей стрелки на перекрестке и перекрестка количество точек, используемых для поворота прямой линии, многоугольника и кружка, каждый из которых имеет свою ширину, сводится к минимуму. Используя значения тригонометрических координат, полученных по индексам таблицы тригонометрических функций согласно углам поворота, объем вычислений сводится к минимуму, так что направляющая стрелка на перекрестке, имеющая произвольный угол, и форма перекрестка могут быть сформированы быстрее. Следовательно, водитель может довольно быстро проконтролировать приближение к перекрестку и осуществить поворот на нем.
[00103] Поскольку перекресток и направляющую стрелку поворота можно сформировать с минимальными вычислениями, настоящее изобретение можно использовать на наземных видах транспорта, судах и летательных аппаратах, а также на маломощных терминалах.
[00104] Специалистам очевидно, что настоящее изобретение допускает различные модификации и видоизменения. Таким образом, подразумевается, что настоящее изобретение охватывает различные модификации и видоизменения, если они входят в объем нижеприведенной формулы изобретения и эквивалентных признаков.

Группа изобретений относится к навигационной технике. Способ управления на перекрестке включает проверку схемы перекрестка для формирования заданного перекрестка на основании информации о местоположении транспортного средства. Кроме того, предусмотрены формирование направляющей стрелки поворота, подлежащей изображению на перекрестке, и одновременное отображение перекрестка и направляющей стрелки поворота, сформированной на нем. Устройство управления транспортным средством на перекрестке включает средство проверки схемы перекрестка, средство формирования направляющей стрелки поворота и средство одновременного отображения перекрестка и направляющей стрелки поворота. Навигационная система содержит средство хранения данных, необходимых для формирования перекрестка, средство хранения данных базовой стрелки, запоминающее устройство для хранения координаты стрелки для указания направления и таблицы тригонометрических функций, а также центральный процессор для управления на перекрестке с помощью направляющей стрелки поворота при использовании данных, необходимых для формирования перекрестка, данных базовой стрелки и таблицы тригонометрических функций и средство отображения перекрестка с направляющей стрелкой поворота. Группа изобретений позволяет быстро и эффективно формировать стрелку при приближении транспортного средства к подъездной дороге. 3 н. и 16 з.п. ф-лы, 10 ил.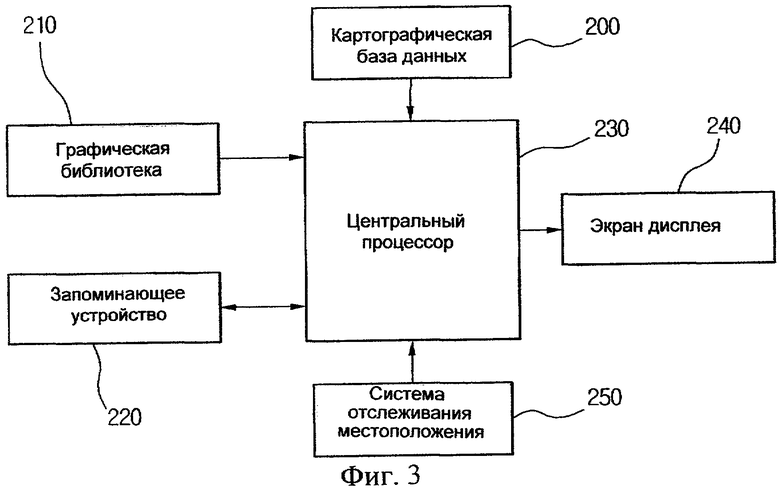
проверку схемы перекрестка для формирования заданного перекрестка на основании информации о местоположении транспортного средства;
формирование направляющей стрелки поворота, подлежащей изображению на перекрестке, и
одновременное отображение перекрестка и направляющей стрелки поворота, сформированной на нем.
вычисление угла подхода подъездной дороги, по которой приближается транспортное средство, углов отхода расходящихся выездных дорог, соединяющихся с подъездной дорогой, и углов между подъездной дорогой и расходящимися выездными дорогами относительно заданного направления;
расположение подъездной дороги по вертикали и
представление расходящихся выездных дорог согласно вычисленным углам между подъездной дорогой и выездными дорогами, взятым относительно подъездной дороги, расположенной по вертикали.
компоновку базовой стрелки, причем базовая стрелка имеет нижний элемент, центральный кружок, верхний элемент и острие;
вычисление угла поворота с использованием угла между подъездной дорогой и выбранной выездной дорогой, если транспортным средством управляют путем выбора одной из выездных дорог, и
поворот верхнего элемента и острия согласно вычисленному углу поворота.
средство проверки схемы перекрестка для формирования заданного перекрестка на основании информации о местоположении транспортного средства;
средство формирования направляющей стрелки поворота, подлежащей изображению на перекрестке, и
средство одновременного отображения перекрестка и направляющей стрелки поворота, сформированной на нем.
средство вычисления угла подхода подъездной дороги, по которой приближается транспортное средство, угла отхода расходящихся выездных дорог, соединяющихся с подъездной дорогой, и углов между подъездной дорогой и расходящимися выездными дорогами относительно заданного направления;
средство расположения подъездной дороги по вертикали и
средство представления расходящихся выездных дорог согласно вычисленным углам между подъездной дорогой и выездными дорогами относительно подъездной дороги, расположенной по вертикали.
средство компоновки базовой стрелки, причем базовая стрелка имеет нижний элемент, центральный кружок, верхний элемент и острие;
средство вычисления угла поворота с использованием угла между подъездной дорогой и выбранной выездной дорогой, если транспортным средством управляют путем выбора одной из выездных дорог, и
средство поворота верхнего элемента и острия согласно вычисленному углу поворота.
средство хранения данных, необходимых для формирования перекрестка;
средство хранения данных базовой стрелки;
запоминающее устройство для хранения координаты стрелки для указания направления и таблицы тригонометрических функций;
центральный процессор для управления на перекрестке с помощью направляющей стрелки поворота при использовании данных, необходимых для формирования перекрестка, данных базовой стрелки и таблицы тригонометрических функций, и
средство отображения перекрестка с направляющей стрелкой поворота, при этом центральный процессор включает
средство проверки схемы перекрестка для формирования заданного перекрестка на основании информации о местоположении транспортного средства, причем информация о местоположении транспортного средства выделена из данных, необходимых для формирования заданного перекрестка, и
средство формирования направляющей стрелки поворота, подлежащей изображению на сформированном перекрестке.
| US 6611753 B1, 26.08.2003 | |||
| US 5121326 A, 09.06.1992 | |||
| DE 19839798 A1, 04.03.1999 | |||
| УСТРОЙСТВО СТАШЕВСКОГО И.И. ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ АВТОМОБИЛЯ | 1999 |
|
RU2171501C2 |

