Изобретение относится к комплексным моделирующим устройствам, в частности к средствам полунатурного моделирования, имитирующим угловые движения цели.
Известен аналог - Динамический имитационный стенд с трехстепенными имитаторами целей (патент РФ №179288, дата публикации 07.05.2018), содержащий имитаторы целей, в состав которых входят: прямолинейные направляющие, редуктор, связанный с приводным электродвигателем и узел доворота с приводами, датчиками. Указанный аналог обеспечивает высокую статическую точность за счет использования точных цифровых датчиков в составе имитаторов цели, а также за счет использования сложной цифровой системы управления.
Известен аналог - Динамический координатор (патент РФ №89900, дата публикации 20.12.2009), выбранный за прототип, содержащий имитаторы сигналов, каждый из которых установлен на каретке с возможностью поворота с помощью приводов в вертикальном и горизонтальном направлениях, направляющие, установленные на вертикальных фермах, и направляющая, установленная на горизонтальной планке, совмещены с зубчатыми рейками, горизонтальная зубчатая рейка установлена на средней горизонтальной направляющей, а каретки, установленные на направляющих, совмещенных с зубчатыми рейками, содержит привод движения, а также датчики положения. Прототип также обеспечивает статическую точность за счет использования в своем составе точных цифровых датчиков и сложной цифровой системы управления.
К недостаткам вышеуказанных аналогов можно отвести:
- использование сложной системы управления, обеспечивающей перемещение имитаторов целей (имитаторов сигналов);
- наличие принципиальной динамической ошибки в синхронизации узла доворота с линейным движением основной каретки.
Предлагаемое изобретение лишено указанных недостатков, так как имеет существенное преимущество - синхронизация доворота антенны-излучателя, входящего в состав имитатора цели, с линейным перемещением осуществляется механически, тем самым исключается использование сложной системы управления, так как для движения имитатора цели не требуются высокоточные приводы, контроллеры и датчики, тем самым исключается наличие принципиальной динамической ошибки в синхронизации узла доворота с линейным движением основной каретки.
Технический результат предлагаемого изобретения заключается в упрощении аппаратной сложности системы управления при исключении принципиальной динамической ошибки в синхронизации узла доворота с линейным движением основной каретки.
Указанный технический результат достигается за счет того, что в имитатор цели с механическим доворотом, состоящий из антенны-излучателя, а также основной каретки, установленной на неподвижных направляющих с зубчатой рейкой с приводной шестерней, которая через редуктор связана с приводным электродвигателем, введены задатчик постоянного напряжения, трехпозиционный переключатель,, дополнительная каретка с направляющими и мелкомодульной зубчатой рейкой, приборная передача с выходной шестерней, палец, вилка, подшипник и ось, при этом мелкомодульная зубчатая рейка через приборную передачу связана с приводной шестерней, а на дополнительной каретке закреплен палец, соединенный с пазом вилки, которая на своем другом конце жестко соединена с осью, нижний конец которой вставлен через подшипник в основную каретку, а верхний конец оси жестко соединен с антенной-излучателем, а приводной электродвигатель соединен через трехпозиционный переключатель с задатчиком постоянного напряжения.
Изобретение поясняется следующими чертежами:
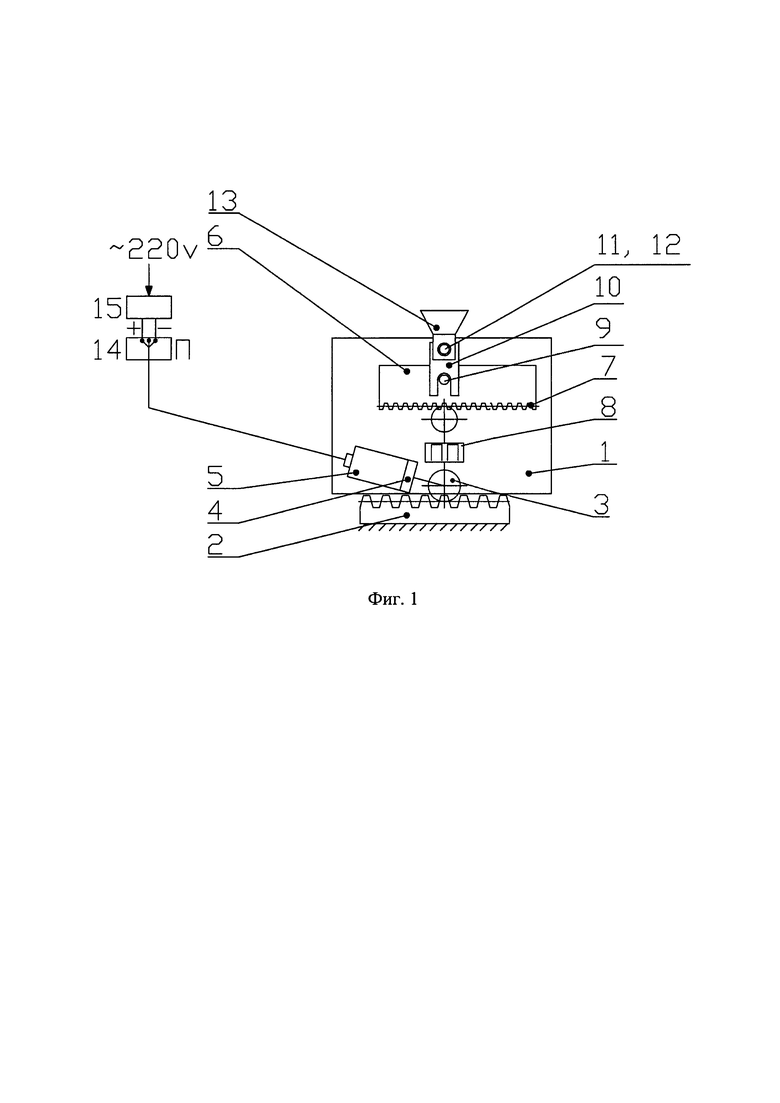
Фиг. 1 - Кинематическая схема предлагаемого изобретения.
На фиг. 1 представлены:
1 - основная каретка;
2 - зубчатая рейка;
3 - приводная шестерня;
4 - редуктор;
5 - приводной электродвигатель;
6 - дополнительная каретка;
7 - мелкомодульная зубчатая рейка;
8 - приборная передача с выходной шестерней;
9 - палец;
10 - вилка;
11 - ось;
12 - подшипник;
13 - антенна-излучатель;
14 - трехпозиционный переключатель;
15 - задатчик постоянного напряжения.
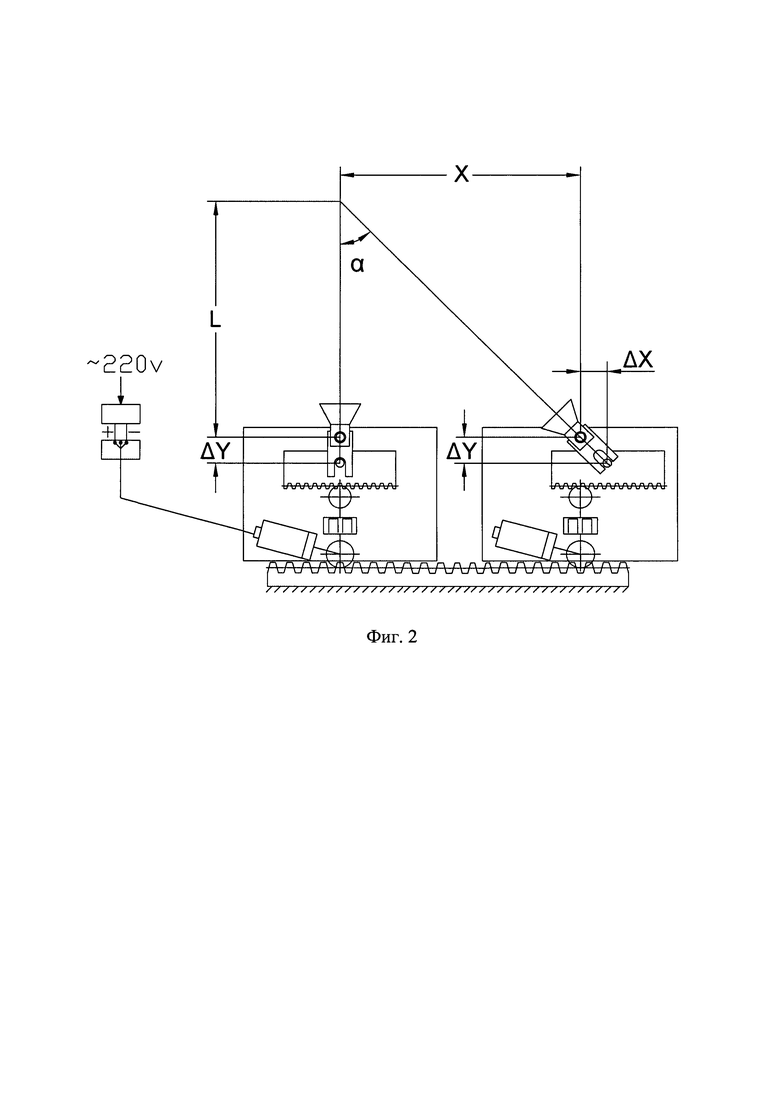
Фиг. 2 - Иллюстрация механизма доворота предлагаемого изобретения при различных его линейных положения.
Изобретение осуществляется следующим образом.
В зависимости от положения трехпозиционного переключателя 14 постоянное напряжение от задатчика 15 вращает через электродвигатель постоянного тока 5 в ту или другую сторону редуктор 4. На выходном валу редуктора 4 закреплена приводная шестерня 3, которая, вращаясь и будучи закрепленной на основной каретке 1, заставляет основную каретку 1 двигаться по зубчатой рейке 2 с ее направляющими. Приводная шестерня 3 связана с приборной передачей 8, которая, взаимодействуя с мелкомодульной зубчатой рейкой 7, установленной жестко на дополнительной каретке 6, заставляет дополнительную каретку 6 перемещаться в туже сторону. Величина перемещения определяется передаточным отношением приборной передачи 8. При этом палец 9, закрепленный на дополнительной каретке 6, поворачивает вилку 10 вокруг оси 11, жестко связанной в верхней своей части с вилкой 10. Нижний конец оси И вставлен в основную каретку 1 через подшипник 12. Таким образом, при перемещении основной каретки 1 синхронно перемещается дополнительная каретка 6 и через палец 9 поворачивается вилку 10 вокруг оси 11, на которой установлена антенна-излучатель 13, имитирующая цель.
Описанная кинематика обеспечивает направление диаграммы направленности антенны-излучателя 13 в точку, где находится приемник излучения - радиолокационная головка самонаведения (РЛГСН). Связь параметров имитатора цели с дистанцией L определяется соотношением
Х/Δх=L/Δy,
полученным из подобия прямоугольных треугольников, где:
L - дистанция до цели - первый катет большого прямоугольника;
X - линейное перемещение антенны-излучателя - второй катет большого прямоугольника;
Δу - расстояние между осью 11 и пальцем 9 при нулевом положении излучателя - первый катет малого прямоугольного треугольника,
Δх - линейное перемещение пальца 9 - второй катет малого прямоугольного треугольника.
Корректировка расстояния Δу (изменение начального положения пальца 9) реализует юстировку имитатора цели при необходимости изменения дистанции L.
Предложенное устройство позволит в технологическую цепочку создания головки самонаведения (ГСН) «проектирование - изготовление - сборка - полунатурное моделирование (ПНМ) - летные испытания» добавить этап проверки собранной ГСН непосредственно вблизи сборочного участка на заводе-изготовителе, что позволит до ПНМ выявить и устранить дефекты сборки ГСН.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
| ШЕСТЕРЕНЧАТЫЙ РЕДУКТОР И МАШИНА ДЛЯ ПРОИЗВОДСТВА ГРАНУЛ, ВКЛЮЧАЮЩАЯ ТАКОЙ ШЕСТЕРЕНЧАТЫЙ РЕДУКТОР | 2015 |
|
RU2680993C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| Стенд для ускоренных испытаний приборных зубчатых механизмов | 1984 |
|
SU1201711A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| АВТОМАТ ДЛЯ ПРОДАЖИ ШТУЧНЫХ ТОВАРОВ | 1967 |
|
SU215636A1 |
| МАНИПУЛЯТОР ДЛЯ НАПЫЛЕНИЯ СФЕРИЧЕСКИХ ОБОЛОЧЕК ИЗ СТЕКЛОПЛАСТИКА | 1966 |
|
SU214791A1 |
| УСТРОЙСТВО для ПОДЪЕМА КОЛПАКА ОТКАЧНОЙМАШИНЫ | 1971 |
|
SU321869A1 |
| Механизм зажима и подачи прутка токарного многошпиндельного автомата | 1979 |
|
SU872038A1 |
| Антенное устройство с электромеханическим приводом | 2021 |
|
RU2781039C1 |
Изобретение относится к моделирующим устройствам. Имитатор цели с механическим доворотом содержит антенну-излучатель, основную каретку, установленную на неподвижные направляющие с зубчатой рейкой, приводной электродвигатель с редуктором и приводной шестерней каретки, дополнительную каретку с закрепленной на ней мелкомодульной зубчатой рейкой, деталями приборной передачи. Приборная передача обеспечивает постоянную точку наведения ГСН при перемещениях каретки. Технический результат – упрощение системы управления при синхронизации угла доворота при линейном движении каретки. 2 ил.
Имитатор цели с механическим доворотом, состоящий из антенны-излучателя, а также основной каретки, установленной на неподвижных направляющих с зубчатой рейкой с приводной шестерней, которая через редуктор связана с приводным электродвигателем, отличающийся тем, что в имитатор цели дополнительно введены задатчик постоянного напряжения, трехпозиционный переключатель, дополнительная каретка с направляющими и мелкомодульной зубчатой рейкой, приборная передача с выходной шестерней, палец, вилка, подшипник и ось, при этом мелкомодульная зубчатая рейка, установленная жестко на дополнительной каретке, через приборную передачу с выходной шестерней связана с приводной шестерней, а на дополнительной каретке закреплен палец, соединенный с пазом вилки, которая на своем другом конце жестко соединена с осью, нижний конец которой вставлен через подшипник в основную каретку, а верхний конец оси жестко соединен с антенной-излучателем, а приводной электродвигатель соединен через трехпозиционный переключатель с задатчиком постоянного напряжения.
| Устройство для измерения перемещения деталей | 1986 |
|
SU1370435A1 |
| ОБЪЕМНЫЙ ПАНТОГРАФ | 1945 |
|
SU84963A1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ СТАБИЛИЗАТОР КООРДИНАТОРА ГОЛОВКИ САМОНАВЕДЕНИЯ | 1970 |
|
SU1840212A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1991 |
|
RU2012845C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОЙДЕННОГО СУДНОМ, САМОЛЕТОМ И Т. П. ПУТИ НА ГЕОГРАФИЧЕСКОЙ КАРТЕ | 1934 |
|
SU47457A1 |

