Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для построения системы компенсации температурного дрейфа гирополукомпаса.
Известен гирополукомпас ГПК-52 (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977, стр. 166), который построен по классической схеме. ГПК-52 содержит трехстепенной гироскоп с вертикальной осью наружной рамы, систему горизонтальной коррекции, состоящую из последовательно соединенных электролитического уровня (закреплен на гироузле), выключателя коррекции и коррекционного двигателя, ротор которого закреплен на оси наружной рамы. Азимутальная коррекция моментная, состоит из широтного потенциометра, расположенного в пульте управления, подключенного к коррекционному двигателю азимутальной коррекции, ротор которого закреплен на оси подвеса гироузла. К этому коррекционному двигателю подключен также потенциометр небаланса. На оси подвеса наружной рамы установлен системный датчик угла (сельсин) и шкала, которая может разворачиваться относительно оси наружной рамы с помощью двигателя с редуктором, установленным на наружной раме. Сигнал на двигатель поступает с потенциометра задатчика курса, расположенного в пульте управления. Для уменьшения температурного дрейфа от остаточного небаланса применяется весовая биметаллическая термокомпенсация, которая представляет собой биметаллическую пластину с двумя грузами, закрепленные на кожухе.
Недостатком гирополукомпаса с биметаллической термокомпенсацией является громоздкость конструкции – наличие большого количества электромеханических элементов и пониженная точность формирования искусственного небаланса, компенсирующего температурный дрейф.
Известен прототип гирополукомпас с аналитической азимутальной коррекцией (Патент № 2799738 Российская Федерация, МПК G01C 19/54 (2006.01), СПК G01C 19/54 (2023.05). Гирополукомпас с аналитической азимутальной коррекцией: №2023112849: заявл. 18.05.2023: опубл. 11.07.2023/ Кривошеев С. В., Стрелков А.Ю., Гилемханов Р.И., заявитель "Казанский национальный исследовательский технический университет им. А.Н. Туполева - КАИ", Бюл. №20) который содержит трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а также указатель ортодромического курса, микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а выходной порт соединен с указателем ортодромического курса. В приборе влияние остаточного небаланса компенсируется аналитически на одной температуре, когда, например, проводят регламентные работы.
Недостатком прототипа является пониженная точность работы гирополукомпаса при изменении температуры внутри прибора.
Техническим результатом изобретения является повышение точности работы гирополукомпаса при изменении температуры внутри прибора.
Технический результат достигается тем, что в гирополукомпасе с компенсацией температурного дрейфа, содержащем трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала, задатчик начального курса, указатель ортодромического курса и микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а выходной порт соединен с указателем ортодромического курса, который формируется в микроконтроллере, новым является то, что гирополукомпас содержит датчик средней температуры, состоящий из N датчиков температуры, размещенных внутри корпуса прибора, выходы которых подключены на суммирующий усилитель, выход которого, являющийся выходом датчика средней температуры, соединен с пятым входным портом микроконтроллера, при этом систематическая составляющая дрейфа от температурного небаланса формируется по формуле
 и суммируется с показанием системного датчика угла,
и суммируется с показанием системного датчика угла,
где  значения угловых скоростей дрейфа записанные в память микроконтроллера в процессе калибровки на заводе-изготовителе;
значения угловых скоростей дрейфа записанные в память микроконтроллера в процессе калибровки на заводе-изготовителе; среднее значение температуры;
среднее значение температуры;  шаг выполнения программы для обеспечения работы микроконтроллера в реальном масштабе времени;
шаг выполнения программы для обеспечения работы микроконтроллера в реальном масштабе времени;  номер температурного поддиапазона, на которые разделен рабочий температурный диапазон.
номер температурного поддиапазона, на которые разделен рабочий температурный диапазон.
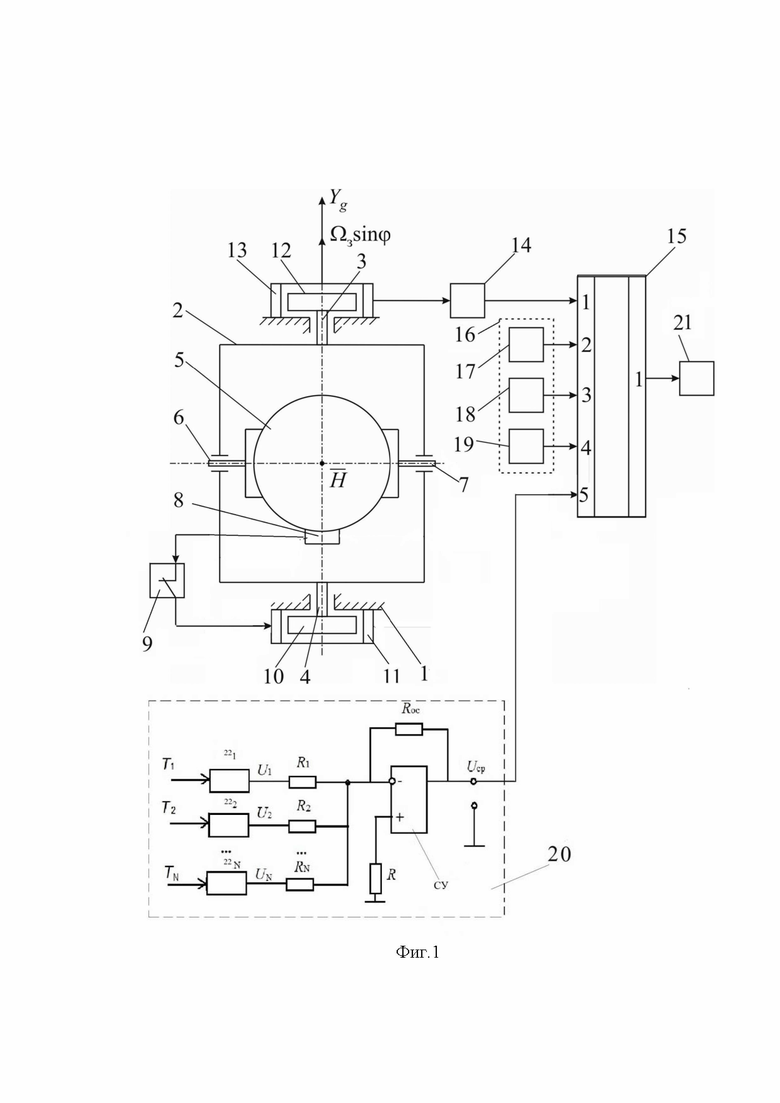
ГПК с автоматической компенсацией температурного дрейфа поясняется структурно-кинематической схемой, представленной на фиг.1.
На фиг. 1 приняты следующие обозначения:
1 – корпус;
2 – наружная рама;
3;4 – полуоси подвеса наружной рамы;
5 – гироузел;
6;7 – полуоси подвеса гироузла;
8 – маятниковый чувствительный элемент;
9 – выключатель коррекции;
10 – ротор коррекционного мотора горизонтальной коррекции;
11 – статор коррекционного мотора горизонтальной коррекции;
12 – ротор системного датчика угла;
13 – статор системного датчика угла;
14 – преобразователь аналог-код;
15 – микроконтроллер;
16 – пульт управления;
17 – задатчик широты;
18 –задатчик балансировочного сигнала;
19 –задатчик начального курса;
20 – датчик средней температуры;
21 – указатель ортодромического курса;
 вектор кинетического момента;
вектор кинетического момента;
 местная вертикаль;
местная вертикаль;
 температура
температура  датчика температуры, где
датчика температуры, где 
22 -  датчик температуры (ДТ), где
датчик температуры (ДТ), где 
 напряжение на выходе
напряжение на выходе датчика температуры, где
датчика температуры, где 
СУ – суммирующий усилитель;
 резистор во входной цепи СУ для
резистор во входной цепи СУ для  датчика температуры;
датчика температуры;
 резистор в цепи обратной связи СУ;
резистор в цепи обратной связи СУ;
 заземляющий резистор для не инвертирующего входа СУ;
заземляющий резистор для не инвертирующего входа СУ;
 выходное напряжение датчик средней температуры.
выходное напряжение датчик средней температуры.
В соответствии с фиг.1 гирополукомпас с компенсацией температурного дрейфа состоит из трехстепенного гироскопа с вертикальной осью наружной рамы, направленной по местной вертикали  . Наружная рама 2 полуосями 3 и 4 кинематически установлена в опорах корпуса 1. Гироузел 5 с помощью полуосей 6 и 7 кинематически установлен в опорах наружной рамы 2. Горизонтальная коррекция состоит из маятникового чувствительного элемента 8, который через размыкающий контакт выключателя коррекции 9 соединен со статором коррекционного мотора горизонтальной коррекции 11. Ротор коррекционного мотора горизонтальной коррекции 10 соединен с полуосью 4 подвеса наружной рамы 2. Системный датчик угла, например, синусно-косинусный трансформатор, является датчиком гироскопического курса и состоит из ротора 12, закрепленного на полуоси 3 наружной рамы 2, и статора 13, закрепленного на корпусе 1. Аналитическая азимутальная коррекция формируется программно в микроконтроллере 15 путем обработки сигналов статора системного датчика угла 13, прошедшего преобразование в двоичный код в преобразователе аналог-код 14, и задатчика широты 17, расположенного в пульте управления 16, которые соответственно подключены на первый и второй входные порты микроконтроллера 15. Компенсация температурного дрейфа осуществляется программно в микроконтроллере 15 путем анализа сигнала датчика средней температуры 20, который подключен на пятый входной порт микроконтроллера 15.
. Наружная рама 2 полуосями 3 и 4 кинематически установлена в опорах корпуса 1. Гироузел 5 с помощью полуосей 6 и 7 кинематически установлен в опорах наружной рамы 2. Горизонтальная коррекция состоит из маятникового чувствительного элемента 8, который через размыкающий контакт выключателя коррекции 9 соединен со статором коррекционного мотора горизонтальной коррекции 11. Ротор коррекционного мотора горизонтальной коррекции 10 соединен с полуосью 4 подвеса наружной рамы 2. Системный датчик угла, например, синусно-косинусный трансформатор, является датчиком гироскопического курса и состоит из ротора 12, закрепленного на полуоси 3 наружной рамы 2, и статора 13, закрепленного на корпусе 1. Аналитическая азимутальная коррекция формируется программно в микроконтроллере 15 путем обработки сигналов статора системного датчика угла 13, прошедшего преобразование в двоичный код в преобразователе аналог-код 14, и задатчика широты 17, расположенного в пульте управления 16, которые соответственно подключены на первый и второй входные порты микроконтроллера 15. Компенсация температурного дрейфа осуществляется программно в микроконтроллере 15 путем анализа сигнала датчика средней температуры 20, который подключен на пятый входной порт микроконтроллера 15.
Датчик средней температуры построен следующим образом. Внутри корпуса гирополукомпаса в специально выбранных местах устанавливают  датчиков температуры
датчиков температуры  ,
,  , которые через входные резисторы
, которые через входные резисторы  подключены на инвертирующий вход суммирующего усилителя СУ, куда также подключен резистор обратной связи
подключены на инвертирующий вход суммирующего усилителя СУ, куда также подключен резистор обратной связи  .
.
Желательно  размещать как можно ближе к гироузлу, а их количество может быть в принципе любым, например,
размещать как можно ближе к гироузлу, а их количество может быть в принципе любым, например, 
Напряжение  на выходе СУ будет определяться средней температурой
на выходе СУ будет определяться средней температурой  внутри корпуса прибора в соответствии с фиг.1
внутри корпуса прибора в соответствии с фиг.1
где  крутизна датчиков температуры (можно считать одинаковой у всех датчиков),
крутизна датчиков температуры (можно считать одинаковой у всех датчиков),  средняя температура.
средняя температура.
Если принять, что  средняя температура будет определяться формулой
средняя температура будет определяться формулой

Работу устройства будем рассматривать в двух режима:
1. Режим настройки осуществляется на заводе-изготовителе, при котором в микроконтроллере 15 в зависимости от средней температуры (1) формируется база угловых скоростей дрейфа от температурного небаланса, записываемая в его память.
2. Режим полетный, при котором с определенным шагом по времени измеряется средняя температура и в зависимости от ее значения к измеренному ГПК углу в микроконтроллере 15 программно с определенным знаком добавляется приращение угла, взятое из памяти микроконтроллера, которое компенсирует дрейф от температурного небаланса.
Работа ГПК в режиме настройки
Прибор устанавливают осью наружной рамы в вертикальное положение, включают питание. После набора гиромотором рабочих оборотов и тестовой проверки микроконтроллера 15 задатчиком 17 задают широту завода- изготовителя. Задатчиком 19 нет необходимости задавать стояночный курс (оцениваться будет приращение угла системного датчика, снимаемого со статорных обмоток 13 в случае синусно-косинусного трансформатора). Задатчиком 18 подается команда для программного перехода к формированию базы данных температурного дрейфа в функции средней температуры. Так как процесс изменения температуры инерционный, то нет необходимости вводить коррекцию на каждом шаге измерения температуры. При этом температурный диапазон внутри прибора  разбивается на несколько равных k поддиапазонов
разбивается на несколько равных k поддиапазонов

где  граничные значения средних температур записывают в память микроконтроллера 15.
граничные значения средних температур записывают в память микроконтроллера 15.
Так как поддиапазоны выбраны равными, то между граничными значениями температур существуют очевидные соотношения

где  шаг изменения температуры.
шаг изменения температуры.
Например, если  , будет 14 поддиапазонов.
, будет 14 поддиапазонов.
Рассмотрим формирование температурного дрейфа для i-го поддиапазона средних температур 
где  температурный дрейф для i-го поддиапазона изменения средней температуры;
температурный дрейф для i-го поддиапазона изменения средней температуры;  показания системного датчика угла при граничных значениях температур;
показания системного датчика угла при граничных значениях температур;  показания системного таймера, соответствующего граничным значениям средних температур.
показания системного таймера, соответствующего граничным значениям средних температур.
Вычисленные значения температурного дрейфа  записывают в ячейки памяти, для которых определяющим фактором является нахождение
записывают в ячейки памяти, для которых определяющим фактором является нахождение  в поддиапазоне .
в поддиапазоне .
Режим ГПК полетный
Когда самолет находится на стоянке, включают питание. После набора гиромотором рабочих оборотов и тестовой проверки микроконтроллера 15 задатчиком 17 задают широту его нахождения (в полете широта вводится либо навигационной системы, либо вручную). Задатчиком 19 задают стояночный курс самолета. Задатчиком 18 подается команда для программного перехода к полетному режиму ГПК. Программа микроконтроллера автоматически осуществляет аналитическую компенсация температурного дрейфа в функции средней температуры в следующей последовательности.
1). Измеряется средняя температура датчиком 20 и через 5-ый порт микроконтроллера записывается в его память. При этом шаг опроса преобразователя аналог-код, к которому по внутренней цепи подключен порт, значительно больше шага опроса преобразователя аналог-код 14 системного датчика угла (в силу более инерционного процесса изменения температуры, чем изменение угла поворота самолета).
2). Программно определяется поддиапазон  из набора поддиапазонов (2), к которому принадлежит измеренная средняя температура и выбирается соответствующая ему записанная в память микроконтроллера угловая скорость температурного дрейфа
из набора поддиапазонов (2), к которому принадлежит измеренная средняя температура и выбирается соответствующая ему записанная в память микроконтроллера угловая скорость температурного дрейфа  .
.
3). На основании выбранного температурного дрейфа формируется на каждом шаге  работы микроконтроллера компенсационная добавка к углу поворота самолета, измеренному системным датчиком ГПК
работы микроконтроллера компенсационная добавка к углу поворота самолета, измеренному системным датчиком ГПК
Заявленный технический результат достигается автоматической компенсацией температурного дрейфа, на основании измерения в заводских условиях средней температуры датчиком 20, значений систематических составляющих дрейфа гирополукомпаса зависящих от изменения температуры в рабочем диапазоне, затем эти значения записываются в микроконтроллер 15 для осуществления автоматической компенсации температурного дрейфа в процессе эксплуатации гирополукомпаса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Способ измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805425C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Устройство для настройки выключателя коррекции, построенного на базе двух гироскопических датчиков угловых скоростей | 2024 |
|
RU2839681C1 |
| Тренажер для изучения гирополукомпаса | 2021 |
|
RU2761381C1 |
Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для построения системы компенсации температурного дрейфа гирполукомпаса. Гирополукомпас (ГПК) с компенсацией температурного дрейфа дополнительно содержит датчик средней температуры, состоящий из N датчиков температуры, размещенных внутри корпуса прибора, выходы которых подключены на суммирующий усилитель, выход которого, является выходом датчика средней температуры. Выход датчик средней температуры соединен с пятым входным портом микроконтроллера, при этом систематическая составляющая дрейфа от температурного небаланса формируется по заданной формуле. Технический результат – повышение точности работы гирополукомпаса при изменении температуры внутри прибора. 1 ил.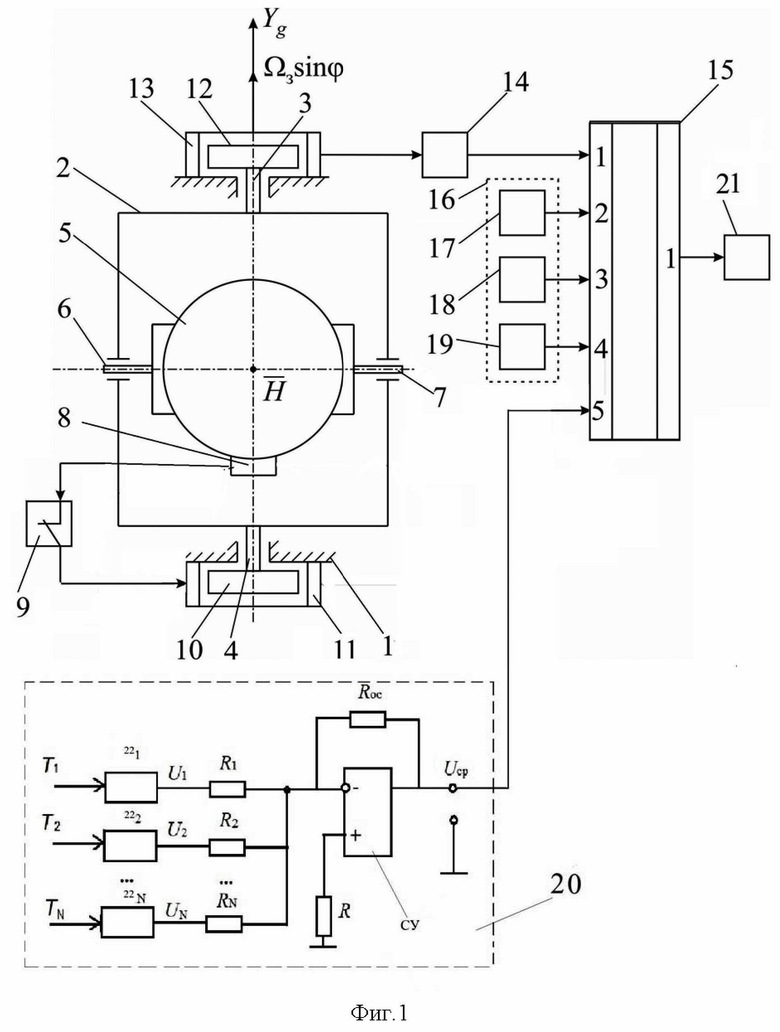
Гирополукомпас с компенсацией температурного дрейфа, содержащий трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала, задатчик начального курса, указатель ортодромического курса и микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а выходной порт соединен с указателем ортодромического курса, который формируется в микроконтроллере отличающийся тем, что гирополукомпас содержит датчик средней температуры, состоящий из N датчиков температуры, размещенных внутри корпуса гирополукомпаса, выходы которых подключены на суммирующий усилитель, выход которого, являющийся выходом датчика средней температуры, соединен с пятым входным портом микроконтроллера, при этом систематическая составляющая дрейфа от температурного небаланса формируется по формуле 


| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| CN 109425334 A, 05.03.2019. | |||

