Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для построения системы азимутальной коррекции гирополукомпаса.
Известен гирополукомпас ГПК-52 с моментной азимутальной коррекцией (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977, стр. 166), который построен по классической схеме. ГПК-52 содержит трехстепенной гироскоп с вертикальной осью наружной рамы, систему горизонтальной коррекции, состоящую из последовательно соединенных электролитического уровня (закреплен на гироузле), выключателя коррекции и коррекционного двигателя, ротор которого закреплен на оси наружной рамы. Азимутальная коррекция моментная, состоит из широтного потенциометра, расположенного в пульте управления, подключенного к коррекционному двигателю азимутальной коррекции, ротор которого закреплен на оси подвеса гироузла. К этому коррекционному двигателю подключен также потенциометр небаланса. На оси подвеса наружной рамы установлен системный датчик угла (сельсин) и шкала, которая может разворачиваться относительно оси наружной рамы с помощью двигателя с редуктором, установленным на наружной раме. Сигнал на двигатель поступает с потенциометра задатчика курса, расположенного в пульте управления.
Недостатком гирополукомпаса с моментной азимутальной коррекцией с устройством задания курса и компенсации небаланса является громоздкость конструкции – наличие большого количества электромеханических элементов и пониженная точность формирования момента азимутальной коррекции, которая зависит от многих конструктивных факторов и, в частности, от температуры.
Известен гирополукомпас – гироагрегат ГА-3, входящей в состав точной курсовой системы ТКС-П, с кинематической азимутальной коррекцией (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977, стр. 232), принятый за прототип, который построен по классической схеме. ГА-3 содержит трехстепенной гироскоп с вертикальной осью наружной рамы, систему горизонтальной коррекции, состоящую из последовательно соединенных маятникового датчика угла (закреплен на гироузле), усилителя горизонтальной коррекции, выключателя коррекции и коррекционного двигателя, ротор которого закреплен на оси наружной рамы. Азимутальная коррекция безмоментная кинематическая, состоит из широтного потенциометра, расположенного в пульте управления, запитанного от стабилизированного источника питания и подключенного через усилитель широтной коррекции к двигателю-генератору, который через редуктор кинематически связан со статором системного датчика угла (сельсин-датчик), ротор которого закреплен на оси подвеса наружной рамы. К усилителю широтной коррекции подключен также потенциометр небаланса (для компенсации систематической составляющей небаланса) и тахогенератор двигателя-генератора для обеспечения стабильной скорости вращения статора системного датчика угла. Для начального задания курса служит задатчик курса, который подключен к двигателю-генератору либо непосредственно, либо через усилитель широтной коррекции.
Недостатком гирополукомпаса ГА-3 с кинематической азимутальной коррекцией с устройством задания курса и компенсации небаланса является громоздкость конструкции – наличие большого количества электромеханических элементов и пониженная точность формирования угловой скорости вращения статора системного датчика угла, которая зависит от многих конструктивных факторов и, в частности, от температуры.
Техническим результатом изобретения является упрощение конструкции ГПК и повышение точности работы системы азимутальной коррекции.
Технический результат достигается тем, что в гирополукомпасе с аналитической азимутальной коррекцией, содержащем трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а также указатель ортодромического курса, новым является то, что гирополукомпас содержит микроконтроллер, на первый входной порт 21 которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй 22, третий 23 и четвертый 24 входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а выходной порт соединен с указателем ортодромического курса, который в микроконтроллере формируется по формуле

где  угловая скорость вращения Земли вокруг своей оси;
угловая скорость вращения Земли вокруг своей оси;  текущая широта;
текущая широта;  систематическая составляющая дрейфа от остаточного небаланса;
систематическая составляющая дрейфа от остаточного небаланса;  добавка, формируемая задатчиком начального курса;
добавка, формируемая задатчиком начального курса;  стояночный курс самолета,
стояночный курс самолета, 
 показания системного датчика угла;
показания системного датчика угла;  время задания стояночного курса;
время задания стояночного курса;  дискретное время;
дискретное время;  номер цикла для организации работы микроконтроллера в реальном масштабе времени;
номер цикла для организации работы микроконтроллера в реальном масштабе времени;  ортодромический курс, вычисленный в микроконтроллере.
ортодромический курс, вычисленный в микроконтроллере.
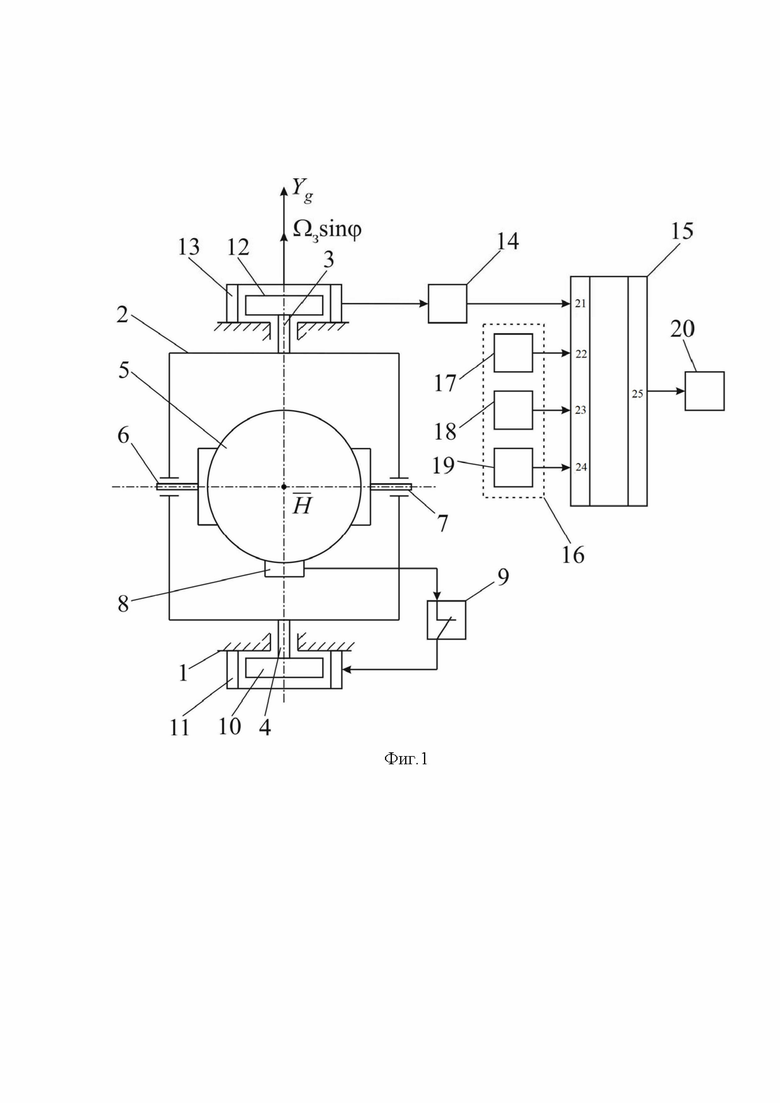
ГПК с аналитической азимутальной коррекцией поясняется структурно-кинематической схемой, представленной на фиг.1.
На фиг. 1 приняты следующие обозначения:
1 – корпус;
2 – наружная рама;
3;4 – полуоси подвеса наружной рамы;
5 – гироузел;
6;7 – полуоси подвеса гироузла;
8 – маятниковый чувствительный элемент;
9 – выключатель коррекции;
10 – ротор коррекционного мотора горизонтальной коррекции;
11 – статор коррекционного мотора горизонтальной коррекции;
12 – ротор системного датчика угла;
13 – статор системного датчика угла;
14 – преобразователь аналог-код;
15 – микроконтроллер;
16 – пульт управления;
17 – задатчик широты;
18 –задатчик балансировочного сигнала;
19 –задатчик начального курса;
20 – указатель ортодромического курса;
21 – первый вход микроконтроллера;
22 – второй вход микроконтроллера;
23 – третий вход микроконтроллера;
24 – четвертый вход микроконтроллера;
25 – выходной порт микроконтроллера;
 вектор кинетического момента;
вектор кинетического момента;
 местная вертикаль;
местная вертикаль;
 угловая скорость вращения Земли вокруг своей оси;
угловая скорость вращения Земли вокруг своей оси;
 текущая широта.
текущая широта.
В соответствии с фиг.1 гирополукомпас с аналитической азимутальной коррекцией состоит из трехстепенного гироскопа с вертикальной осью наружной рамы, направленной по местной вертикали  . Наружная рама 2 полуосями 3 и 4 кинематически установлена в опорах корпуса 1. Гироузел 5 с помощью полуосей 6 и 7 кинематически установлен в опорах наружной рамы 2. Горизонтальная коррекция состоит из маятникового чувствительного элемента 8, который через размыкающий контакт выключателя коррекции 9 соединен со статором коррекционного мотора горизонтальной коррекции 11. Ротор коррекционного мотора горизонтальной коррекции 10 соединен с полуосью 4 подвеса наружной рамы 2. Системный датчик угла, например, синусно-косинусный трансформатор, является датчиком гироскопического курса и состоит из ротора 12, закрепленного на полуоси 3 наружной рамы 2, и статора 13, закрепленного на корпусе 1. Аналитическая азимутальная коррекция формируется программно в микроконтроллере 15 путем обработки сигналов статора системного датчика угла 13, прошедшего преобразование в двоичный код в преобразователе аналог-код 14, и задатчика широты 17, расположенного в пульте управления 16, которые соответственно подключены на первый 21 и второй 22входные порты микроконтроллера 15. Установка начального ортодромического курса осуществляется задатчиком начального курса 19, подключенным на четвертый 24 входной порт микроконтроллера 15. Компенсация постоянной составляющей небаланса осуществляется задатчиком балансировочного сигнала 18, подключенного на третий 23 входной порт микроконтроллера 15. Указатель ортодромического курса 20 подключен к выходному порту микроконтроллера 15.
. Наружная рама 2 полуосями 3 и 4 кинематически установлена в опорах корпуса 1. Гироузел 5 с помощью полуосей 6 и 7 кинематически установлен в опорах наружной рамы 2. Горизонтальная коррекция состоит из маятникового чувствительного элемента 8, который через размыкающий контакт выключателя коррекции 9 соединен со статором коррекционного мотора горизонтальной коррекции 11. Ротор коррекционного мотора горизонтальной коррекции 10 соединен с полуосью 4 подвеса наружной рамы 2. Системный датчик угла, например, синусно-косинусный трансформатор, является датчиком гироскопического курса и состоит из ротора 12, закрепленного на полуоси 3 наружной рамы 2, и статора 13, закрепленного на корпусе 1. Аналитическая азимутальная коррекция формируется программно в микроконтроллере 15 путем обработки сигналов статора системного датчика угла 13, прошедшего преобразование в двоичный код в преобразователе аналог-код 14, и задатчика широты 17, расположенного в пульте управления 16, которые соответственно подключены на первый 21 и второй 22входные порты микроконтроллера 15. Установка начального ортодромического курса осуществляется задатчиком начального курса 19, подключенным на четвертый 24 входной порт микроконтроллера 15. Компенсация постоянной составляющей небаланса осуществляется задатчиком балансировочного сигнала 18, подключенного на третий 23 входной порт микроконтроллера 15. Указатель ортодромического курса 20 подключен к выходному порту микроконтроллера 15.
Так как аналитическая коррекция формируется под управлением микроконтроллера 15, то для организации работы в реальном масштабе времени достаточно пояснить один цикл работы микроконтроллера. После включения ГПК внутренний таймер через заданное время, которое определяется временем набора ротором гиромотора номинальных оборотов, разрешает опрос преобразователя аналог-код 14, к которому подключен статор системного датчика угла 13. При этом показание системного датчика угла  записывается в заданную ячейку памяти оперативного запоминающего устройства (ОЗУ).
записывается в заданную ячейку памяти оперативного запоминающего устройства (ОЗУ).
Дальнейшую работу азимутального канала ГПК с аналитической азимутальной коррекцией рассмотрим в следующей последовательности.
1. Компенсация в выходном сигнале влияния вертикальной составляющей угловой скорости вращения Земли вокруг своей оси (устанавливается на взлете и изменяется в полете в зависимости от широты).
В северном полушарии вертикальная составляющая вращения Земли вокруг своей оси направлена по местной вертикали вверх от центра Земли и равна  (в южном полушарии вертикальная составляющая направлена к центру Земли). При этом статор 13 системного датчика угла в северном полушарии будет вращаться против часовой стрелки, а в южном полушарии по часовой стрелке, если смотреть со стороны местной вертикали. Так как ротор 12 системного датчика угла стабилизирован гироскопом, то вертикальная составляющая вращения Земли вокруг своей оси создает методическую погрешность в измерении курсового угла. Для ее компенсации достаточно вычислить угол поворота, соответствующий этой угловой скорости и вычесть из показаний системного датчика угла
(в южном полушарии вертикальная составляющая направлена к центру Земли). При этом статор 13 системного датчика угла в северном полушарии будет вращаться против часовой стрелки, а в южном полушарии по часовой стрелке, если смотреть со стороны местной вертикали. Так как ротор 12 системного датчика угла стабилизирован гироскопом, то вертикальная составляющая вращения Земли вокруг своей оси создает методическую погрешность в измерении курсового угла. Для ее компенсации достаточно вычислить угол поворота, соответствующий этой угловой скорости и вычесть из показаний системного датчика угла
 ,
,
где  шаг вычислительного цикла.
шаг вычислительного цикла.
При этом  записана в ОЗУ как константа, а широта вводится либо вручную с помощью задатчика широты 17, либо его роль выполняет навигационная система. Во всех случаях микроконтроллер опрашивает задатчик 17 с определенным шагом по времени
записана в ОЗУ как константа, а широта вводится либо вручную с помощью задатчика широты 17, либо его роль выполняет навигационная система. Во всех случаях микроконтроллер опрашивает задатчик 17 с определенным шагом по времени  , например,
, например,  , где n – натуральное число. Это говорит о том, что преобразователь аналог-код опрашивается с шагом, например,
, где n – натуральное число. Это говорит о том, что преобразователь аналог-код опрашивается с шагом, например,  (так как курс самолета меняется с большой скоростью), а опрос задатчика широты может осуществляться значительно реже (так как процесс изменения широты более медленный, по сравнению с изменением угла поворота летательного аппарата).
(так как курс самолета меняется с большой скоростью), а опрос задатчика широты может осуществляться значительно реже (так как процесс изменения широты более медленный, по сравнению с изменением угла поворота летательного аппарата).
2.Задание начального стояночного курса самолета (осуществляется перед каждым полетом).
После приведения ГПК в рабочее состояние вектор кинетического момента  а, следовательно, и ротор 12 системного датчика угла займет произвольное положение в азимуте относительно статора, и системный датчик угла выдаст произвольное значение угла ортодромического курса. Чтобы в полете можно было пользоваться ГПК, необходимо выставить на указателе 20 значение стояночного курса самолета по отношению к меридиану точки вылета. Для этого необходимо воспользоваться задатчиком начального курса 19. При этом в пределах основного цикла
а, следовательно, и ротор 12 системного датчика угла займет произвольное положение в азимуте относительно статора, и системный датчик угла выдаст произвольное значение угла ортодромического курса. Чтобы в полете можно было пользоваться ГПК, необходимо выставить на указателе 20 значение стояночного курса самолета по отношению к меридиану точки вылета. Для этого необходимо воспользоваться задатчиком начального курса 19. При этом в пределах основного цикла  микроконтроллер 15 обратится к задатчику начального курса 19, на котором будет сформировано дополнительное значение для показаний системного датчика угла в виде добавки
микроконтроллер 15 обратится к задатчику начального курса 19, на котором будет сформировано дополнительное значение для показаний системного датчика угла в виде добавки  и показание микроконтроллера примет вид
и показание микроконтроллера примет вид

где  , стояночный курс самолета, показание системного датчика угла.
, стояночный курс самолета, показание системного датчика угла.
3. Компенсация в выходном сигнале влияния систематической составляющей дрейфа от остаточного небаланса (выполняется при регламентных работах через несколько полетов на стоянке самолета – своеобразная калибровка).
Для компенсации влияния остаточного небаланса необходимо с задатчика балансировочного сигнала 18 подать сигнал на проведение калибровки, которая будет проводиться заданное время 
где  время начала и окончания процесса калибровки, которые записываются в заданные ячейки ОЗУ.
время начала и окончания процесса калибровки, которые записываются в заданные ячейки ОЗУ.
В результате работы программы калибровки определяется систематическая составляющая угловой скорости дрейфа по формуле
где  – показания указателя ортодромического курса 20 в начале и в конце процесса калибровки, которые записываются в заданные ячейки ОЗУ.
– показания указателя ортодромического курса 20 в начале и в конце процесса калибровки, которые записываются в заданные ячейки ОЗУ.
При этом, если 
и, если 
Таким образом, показание указателя микроконтроллера будет определяться по формуле
в которой учтены все компоненты, влияющие на точность формирования ортодромического курса.
4. Измерение ортодромического курса в полете.
В полете статор 13 системного датчика угла будет вращаться вместе с самолетом как при колебаниях по курсу, так и при разворотах. При этом будет изменяться выходной сигнал системного датчика угла, и в выходном сигнале микроконтроллера (25) будут отсутствовать погрешности от вертикальной составляющей угловой скорости вращения Земли и от нескомпенсированного в самом ГПК остаточного небаланса с точностью до погрешностей компенсации.
Таким образом, предлагаемое устройство позволяет получить следующие положительные эффекты.
1. Упростить конструкцию ГПК, исключив из него следующие электромеханические элементы: датчик момента азимутальной коррекции, расположенный на оси подвеса гироузла, систему разворота статора системного датчика угла, состоящую из двигателя с редуктором и электромагнитной муфтой (если азимутальная коррекция моментная), или только систему кинематической азимутальной коррекции, которая предназначена для разворота статора системного датчика угла, состоящую из двигателя-генератора с редуктором и электромагнитной муфтой и усилителя (для варианта кинематической азимутальной коррекции).
2. Повысить точность компенсации влияния вертикальной составляющей угловой скорости вращения Земли и дрейфа от остаточного небаланса, так как отсутствуют электрические элементы, частично компенсирующие влияние температуры в системах азимутальной коррекции. В предлагаемой схеме точность будет определяться разрядностью микроконтроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Способ измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805425C1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Тренажер для изучения гирополукомпаса | 2021 |
|
RU2761381C1 |
Изобретение относится к точному приборостроению, а именно к гироскопической технике. Сущность предлагаемого изобретения заключается в том, что система азимутальной коррекции гирополукомпаса (ГПК) содержит микроконтроллер (МК), на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, установленного на оси подвеса наружной рамы. На второй, третий и четвертый входные порты МК соответственно подключены задатчик широты, задатчик балансировочного сигнала, задатчик начального курса, установленные в пульте управления. Выходной порт МК соединен с указателем ортодромического курса, формирующегося по формуле  где
где  угловая скорость вращения Земли вокруг своей оси;
угловая скорость вращения Земли вокруг своей оси;  текущая широта;
текущая широта;  систематическая составляющая дрейфа от остаточного небаланса;
систематическая составляющая дрейфа от остаточного небаланса;  добавка, формируемая задатчиком начального курса;
добавка, формируемая задатчиком начального курса;  стояночный курс самолета,
стояночный курс самолета, 
 показания системного датчика угла;
показания системного датчика угла;  время задания стояночного курса;
время задания стояночного курса;  дискретное время;
дискретное время;  номер цикла для организации работы микроконтроллера в реальном масштабе времени;
номер цикла для организации работы микроконтроллера в реальном масштабе времени;  ортодромический курс, вычисленный в МК. Техническим результатом изобретения является упрощение конструкции гирополукомпаса и повышение точности работы системы азимутальной коррекции. 1 ил.
ортодромический курс, вычисленный в МК. Техническим результатом изобретения является упрощение конструкции гирополукомпаса и повышение точности работы системы азимутальной коррекции. 1 ил.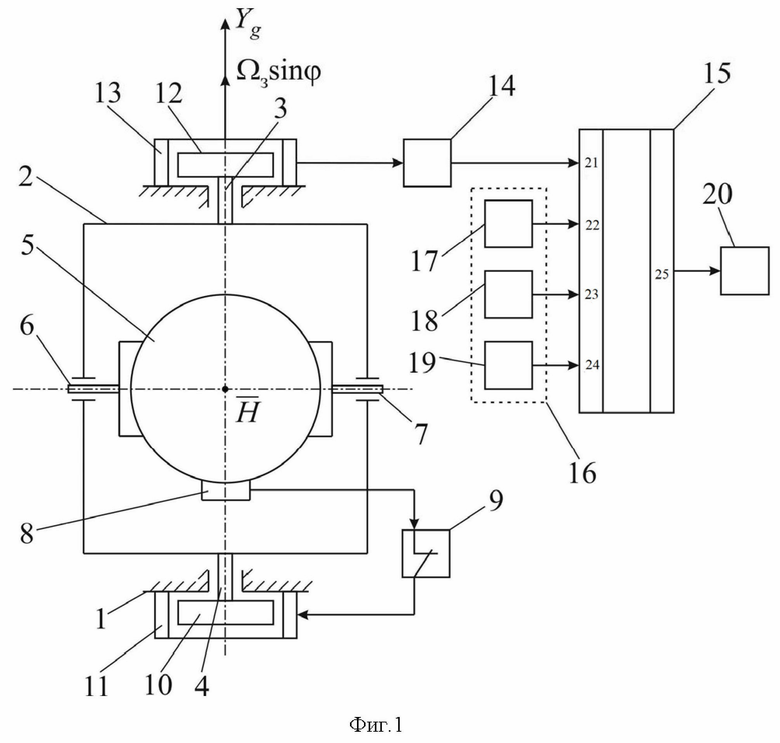
Гирополукомпас с аналитической азимутальной коррекцией, содержащий трехстепенной гироскоп с вертикальной осью наружной рамы, в которую в опорах подвеса установлен гироузел с закрепленным маятниковым чувствительным элементом, выход которого через выключатель коррекции электрически подключен к коррекционному мотору горизонтальной коррекции, расположенным на оси наружной рамы, с которой также кинематически связан ротор системного датчика угла, статор которого закреплен на корпусе прибора, пульт управления, содержащий задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а также указатель ортодромического курса, отличающийся тем, что гирополукомпас содержит микроконтроллер, на первый входной порт которого через преобразователь аналог-код подключен выход системного датчика угла, при этом на второй, третий и четвертый входные порты соответственно подключены задатчик широты, задатчик балансировочного сигнала и задатчик начального курса, а выходной порт соединен с указателем ортодромического курса, который в микроконтроллере формируется по формуле

где  угловая скорость вращения Земли вокруг своей оси;
угловая скорость вращения Земли вокруг своей оси;  текущая широта;
текущая широта;  систематическая составляющая дрейфа от остаточного небаланса;
систематическая составляющая дрейфа от остаточного небаланса;  добавка, формируемая задатчиком начального курса;
добавка, формируемая задатчиком начального курса;  стояночный курс самолета,
стояночный курс самолета, 
 показания системного датчика угла;
показания системного датчика угла;  время задания стояночного курса;
время задания стояночного курса;  дискретное время;
дискретное время;  номер цикла для организации работы микроконтроллера в реальном масштабе времени;
номер цикла для организации работы микроконтроллера в реальном масштабе времени;  ортодромический курс, вычисленный в микроконтроллере.
ортодромический курс, вычисленный в микроконтроллере.
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| Способ изготовления спиральных сверл и других цилиндрических изделий со спиральными или прямыми канавками накатыванием плоскими плашками | 1950 |
|
SU91160A1 |
| WO 2022090955 A1, 05.05.2022 | |||
| CN 0109724579 A, 07.05.2019 | |||
| JP 2000142581 A, 23.05.2000. | |||

