Изобретение относится к использованию преимущественно при конструировании летательных аппаратов с вертикальным подъемом для индивидуального пользования и может найти применение при конструировании устройства для создания дополнительных усилий при всплытии и погружении подводных лодок.
В предлагаемом способе силу для вертикального подъема создают посредством возвратно-поступательных прямолинейных движений колебательного элемента 4 так, что высота подъема аппарата за время перемещения колебательного элемента из верхней мертвой точки до нижней больше, чем снижение за время свободного падения за время перемещения колебательного элемента из нижней точки до верхней мертвой точки. Во время перемещении колебательного элемента из верхней мертвой точки до нижней точки засасывают среду внутрь корпуса колебательного контура 1 через открываемые окна 2, изменяя площадь верхней лобовой поверхности аппарата, а при перемещении колебательного элемента из нижней мертвой точки до верхней вытесняют среду через окна 5 в колебательном элементе 4. При этом вектор скорости подъема колебательного элемента 4 совпадает с вектором скорости аппарата, перпендикулярен плоскости колебательного элемента и горизонтальной плоскости аппарата.
Известны способы перемещения тела в пространстве:
1. Способ передвижения транспортных средств в воздушной среде.
RU 94021129 A1, B 64 С 33/00. 1996.06.02.
2. Способ передвижения транспортных средств в воздушной среде.
RU 02094319 С1, В 64 С 33/00. 1997.10.27.
3. Способ горизонтального прямолинейного машущего полета летательного аппарата тяжелее воздуха.
RU 02129506 С1, В 64 С 33/00. 1996.09.30.
В перечисленных способах подъемная сила возникает за счет маховых колебаний крыльев летательного аппарата.
К причинам, препятствующим достижению указанного ниже технического результата, относится то, что в известных способах RU 94021129 A1, B 64 С 33/00, 1996 г., RU 02094319 C1, B 64 С 33/00, 1997 г., RU 02129506 C1, B 64 С 33/00, 1996 г. затруднен взлет аппарата из-за ограничения амплитуды взмаха крыла.
4. Аппарат для перемещения в воздушном пространстве.
Патент Франции №541110, 1922 г.
В данном летательном аппарате подъемная сила возникает на двух горизонтальных поверхностях, совершающих прямолинейные возвратно-поступательные движения-колебания относительно друг друга и при угле атаки, равном 90 градусов. Из-за того что колебания нижней поверхности осуществляются не в корпусе, невозможно использовать данный способ, используемый в конструкции летательного аппарата, при конструировании более аэродинамичных летательных аппаратов, и затрудненно целенаправленное горизонтальное их перемещение.
Способ перемещения, заложенный в данном устройстве, и взят за прототип.
Задачей изобретения является повышение эффективности и расширение сферы использования способа перемещения, заложенного в прототипе.
Поставленная цель достигается тем, что в предлагаемом способе силу для вертикального подъема, например, летательного, подводного аппарата создают посредством возвратно-поступательных прямолинейных движений колебательного элемента 4 так, что высота подъема аппарата за время перемещения колебательного элемента из верхней мертвой точки до нижней больше, чем снижение за время свободного падения за время перемещения колебательного элемента из нижней точки до верхней мертвой точки. Во время перемещении колебательного элемента из верхней мертвой точки до нижней точки засасывают среду внутрь корпуса колебательного контура 1 через открываемые окна 2, изменяя площадь верхней лобовой поверхности аппарата, а при перемещении колебательного элемента из нижней мертвой точки до верхней вытесняют среду через окна 5 в колебательном элементе 4. При этом вектор скорости подъема колебательного элемента 4 совпадает с вектором скорости аппарата, перпендикулярен плоскости колебательного элемента и горизонтальной плоскости аппарата.
Горизонтальное перемещение аппарата осуществляется за счет планирования и струи среды (воздуха, воды), вытесняемой из пространства колебательного контура 1 через окна 5 в колебательном контуре.
Изобретение поясняется чертежами:
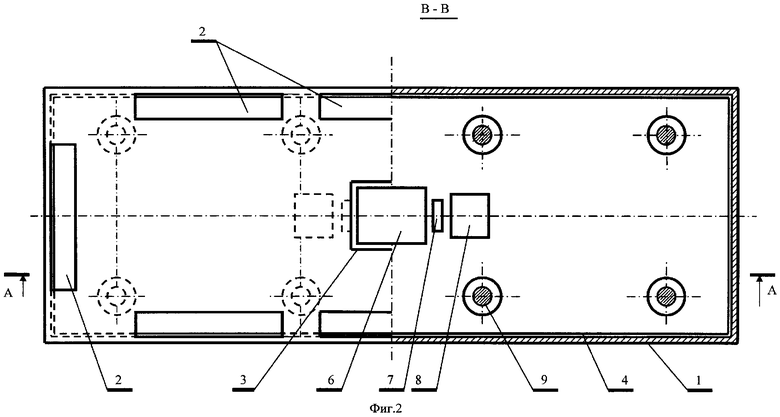
фиг.1 - главный вид колебательного контура,
фиг.2 - вид сверху колебательного контура,
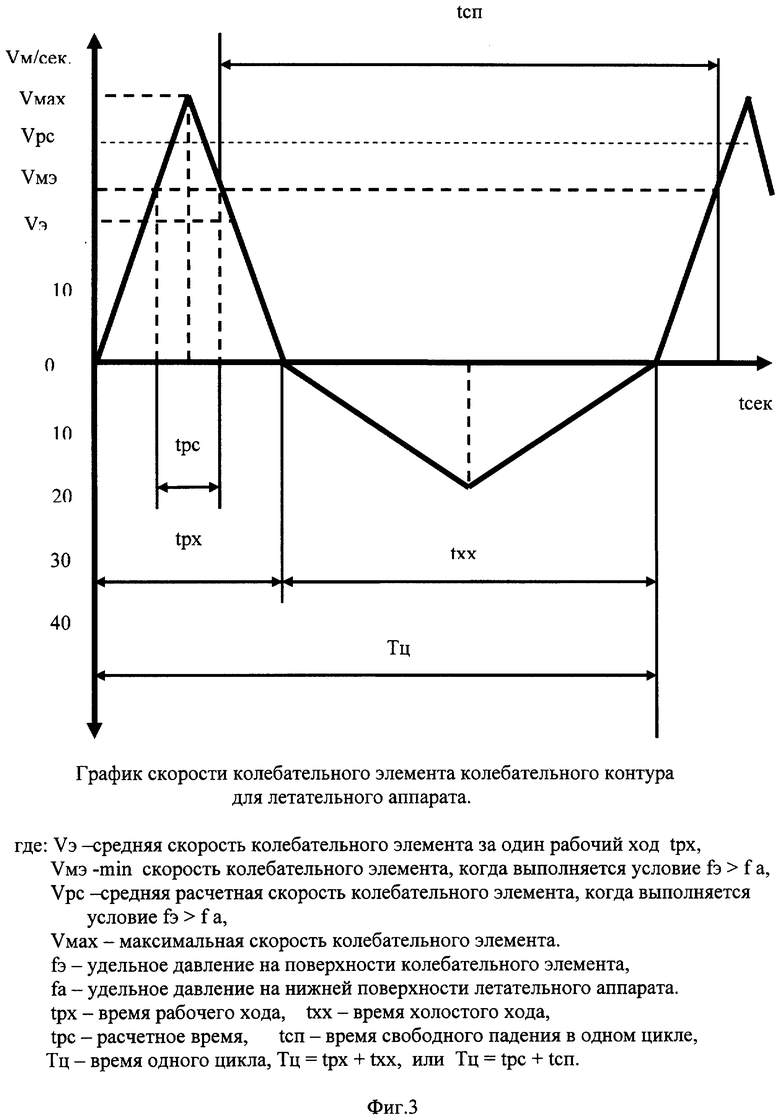
фиг.3 - график скорости колебательного элемента.
На фиг.1-2 предлагается устройство колебательного контура аппарата, в котором заложен предлагаемый способ перемещения тела (аппарата) в пространстве (среде - воздушной, водной).
Колебательный контур 1 состоит из обечайки, верхнюю часть которой закрывает поверхность. Снизу в обечайку устанавливается колебательный элемент 4, контур которого совпадает по контуру с обечайкой колебательного контура. Внутри, между колебательным контуром 1 и колебательным элементом 4, расположен механизм, приводящий в движение колебательный элемент.
Механизм привода колебательного элемента состоит из двигателя 6 внутреннего сгорания, фрикционной муфты 7, маслонасоса или компрессора 8, гидропневмоцилиндров 9. В случае использования воздуха в системе в механизм колебательного элемента устанавливают ресиверы.
В верхней поверхности колебательного контура по ее краю и по всему периметру расположены окна 2, открываемые при движении колебательного элемента вниз за счет сопротивления среды или пилотом.
В нижней части колебательного элемента по периметру расположены окна 5, имеющие управляемые заслонки. Через заднее (хвостовое) окно за счет выброса струи среды (воздуха, воды) из колебательного контура осуществляется горизонтальное перемещение аппарата, при этом окна 5 по бокам и в передней части колебательного элемента закрываются.
Механизм привода колебательного элемента можно монтировать как на самом колебательном элементе, так и на горизонтальной поверхности колебательного контура 1, например, снизу или сверху.
Расположение оборудования на колебательном элементе позволяет увеличить скорость подъема, например, летательного аппарата.
Колебательный элемент 4 может быть любой формы и конфигурации. Например: прямоугольной, круглой, овальной, конусной, сферической и т.п. формы и конфигурации.
На аппарате возможна установка одного и более колебательных контуров.
Окна 2, 5 могут быть прямоугольной, круглой или овальной формы.
При конструировании летательного аппарата по периметру колебательного контура устанавливаются стабилизирующие плоскости, имеющие возможность поворачиваться вниз для уменьшения сопротивления верхней лобовой поверхности летательного аппарата при его подъеме и вниз или вверх во время его спуска. Во время поворота (опускания) вниз стабилизирующей плоскости открываются окна 2. Кабина устанавливается сверху колебательного контура.
Принцип работы колебательного контура для летательного аппарата.
После установления в гидропневмосистеме рабочего давления включается механизм работы цилиндров 9. Во время хода колебательного элемента 4 вниз (рабочий ход), открываются окна 2,5, и воздух засасывается в пространство колебательного контура, что позволяет снизить нагрузку на привод. Во время хода колебательного элемента вверх (холостой ход) окна 2 закрываются, а окна 5 остаются открытыми, и через них выходит вытесняемый из колебательного контура воздух.
При горизонтальном полете окно 5 остается открытым в хвостовой части колебательного элемента, а с боков и в носовой части окна 5 закрывают.
Принцип работы колебательного контура для подводного аппарата.
Он не отличается от принципа работы колебательного контура для летательного аппарата, но при этом при подъеме можно использовать как дополнительную силу воду, вытесняемую из балластной системы, направляя ее в колебательный контур при движении колебательного элемента вниз.
Сущность изобретения заключается в следующем.
Подъемная сила аппаратов возникает за счет сопротивления среды (воздушной, водной) согласно формуле:

где F - подъемная сила (Н),
р - плотность среды (кг/м3),
S - площадь колебательного элемента (м2),
α - угол атаки (град.),
V - скорость колебательного элемента (м/сек).
Указанный технический результат при осуществлении изобретения достигается тем, что в предлагаемом способе при угле атаки α, равном 90 градусов, Sin90 градусов равен единице, т.е. для данного способа формула (1) имеет вид:
F=p×S×V2/2(Н),
подъемная сила для вертикального подъема аппарата, возникает за счет скорости прямолинейных возвратно-поступательных движений-колебаний колебательного элемента 4, расположенного в корпусе колебательного контура 1, а горизонтальное перемещение осуществляется за счет планирования и струи среды (воздуха, воды), вытесняемой из пространства колебательного контура.
При этом средняя скорость колебательного элемента должна быть достаточной для создания на поверхности Sэ - колебательного элемента 4 удельного давления - fэ(Н), превышающего удельное давление веса, например, летательного аппарата - fa(H), приходящегося на единицу его общей поверхности Sa.
fэ>fa(Н/м2).
Время перемещения поверхности колебательного элемента Sэ-4 колебательного контура от нижней мертвой точки до верхней txx может быть равно или больше времени перемещения поверхности Sэ от верхней мертвой точки до нижней tpx.
txx≥tpx (сек).
Основным условием для предлагаемого способа перемещения тела в пространстве является то, что расстояние (путь) - Нап, пройденное поверхностью колебательного контура 1 за время tpc в одном цикле, должно быть больше расстояния, пройденного колебательным контуром (аппаратом) при свободном падении Нсп, т.е. за время tсп.
tсп=Тц-tpc сек в одном цикле Тц (сек).
Тц=tpx+txx (сек) или Тц=tpc+tсп.
См. график скорости колебательного элемента (фиг.3).
Следовательно, путь (высота) подъема за время одного цикла - Тц равен:
Нап=Нрс-Нсп (м),
где: Нрс - путь, пройденный колебательным контуром (аппаратом) за промежуток времени tpc, т.е. когда действует подъемная сила Fп (м),
Нсп - путь, пройденный колебательным контуром (аппаратом) за промежуток времени, когда на колебательный элемент не оказывает сопротивление воздушный или водный напор потока, т.е. за время свободного падения tсп.
В предлагаемом способе вектор скорости подъема совпадает с вектором движения колебательного контура, т.е. угол между ними составляет ноль градусов, и вся мощность двигателя расходуется на подъем аппарата.
В предлагаемом способе коэффициент лобового сопротивления верхней поверхности аппарата составляет меньше единицы, а коэффициент лобового сопротивления колебательного элемента равен или больше единицы.
В предлагаемом способе с целью увеличения подъемной силы верхняя лобовая поверхность колебательного контура изменяет свою площадь при движении аппарата вверх.
В предлагаемом способе передачу колебаний колебательному элементу 4 можно осуществлять при помощи пневматического или гидравлического привода, а также за счет газово-воздушной струи или за счет прямого воздействия поршневой системы ДВС с колебательным элементом.
В подводных аппаратах при подъеме можно использовать как дополнительную силу воду, вытесняемую из балластной системы, направляя ее в колебательный контур при движении колебательного элемента вниз. При применении данного способа, для создания дополнительных усилий при всплытии и погружении подводных аппаратов, например: подводных лодок, батискафов, в гидропневмосистеме можно использовать как воздух для продува балласта, так и балластную воду, что позволит подводным аппаратам безопасно погружаться на большую глубину.
На подводных аппаратах колебательные контуры можно устанавливать как в нижней части корпуса для всплытия, так и верхней части корпуса для погружения подводного аппарата. При установке на верхней части корпуса подводного аппарата роль колебательного элемента выполняет корпус колебательного контура 1.
В предлагаемом способе отсутствуют вращающиеся элементы, соприкасающиеся со средой.
Изобретение относиться к области аппаратов, предназначенных для перемещения в текучей среде. Способ заключается в том, что силу для вертикального подъема создают посредством возвратно-поступательных прямолинейных движений колебательного элемента так, что высота подъема аппарата за время перемещения колебательного элемента из верхней мертвой точки до нижней точки больше, чем снижение за время свободного падения за время перемещения колебательного элемента из нижней точки до верхней мертвой точки. При перемещении колебательного элемента из верхней мертвой точки до нижней точки засасывают среду внутрь обечайки через открываемые окна, изменяя площадь верхней лобовой поверхности аппарата. При перемещении колебательного элемента из нижней мертвой точки до верхней точки вытесняют среду через окна в колебательном элементе. Вектор скорости подъема колебательного элемента совпадает с вектором скорости аппарата, перпендикулярен плоскости колебательного элемента и горизонтальной плоскости аппарата. Технический результат - повышение эффективности перемещения. 2 з.п. ф-лы, 3 ил.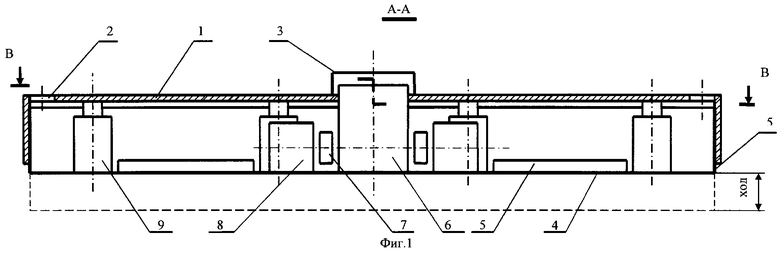
| Способ количественного определения диметилсульфида | 1973 |
|
SU541110A1 |
| ДИФРАКЦИОННЫЙ ИК-СПЕКТРОМЕТР ДЛЯ ИССЛЕДОВАНИЯ ТОНКИХ ПЛЕНОК | 1986 |
|
SU1514046A1 |
| Способ полета летательного аппарата | 1977 |
|
SU1066137A1 |
| МАХОВОЙ ДИАФРАГМЕННЫЙ ДВИЖИТЕЛЬ (ЕГО ВАРИАНТЫ) И МАХОВОЙ САМОЛЕТ НА ЕГО ОСНОВЕ | 1996 |
|
RU2123455C1 |

