Изобретение относится к авиационной технике, технике летающих роботов и технике авиамоделизма.
Известен и широко используется способ полета посредством неподвижного крыла с созданием подъемной силы посредством винта (или другого устройства), реализуемый в самолетах.
Недостатками использования такого способа в самолетах являются недостаточная маневренность на низких скоростях и невозможность двигаться в произвольном направлении без разворота всего самолета.
Общеизвестен способ полета посредством машущего крыла. Существуют многочисленные махолеты (орнитоптеры), например устройство машущих крыльев с циклической круткой и управлением по крену (1). Устройство летает посредством возвратно-поступательного движения крыльев с остановкой крыла в верхней и нижней точках.
Недостатками использования такого способа в махолетах являются снижение КПД из-за движения с ускорением около точки экстремума движения крыла, проблемы устойчивости, сложности устройства и его управления.
Известен и широко используется способ полета посредством вращающегося в горизонтальной плоскости несущего винта. Существуют многочисленные вертолеты, например геликоптер с механизмом управления ротора (2), состоящий из фюзеляжа с двигательной установкой и несущего роторного винта с механизмом управления.
Недостатками использования такого способа полета в вертолетах являются их сложность и относительно низкая скорость полета.
Известен летательный аппарат (3), представляющий собой фюзеляж 9 с посадочными шасси 10 и расположенным вдоль оси фюзеляжа в центре двигателем 1, на выходных валах которого размещены редукторы 2 с выходящими противоположно вращающимися соосными валами 3 внутри валов 4 с закрепленными на их концах креплениями 6 плоскостей. В этих креплениях 6 расположены несколько механизмов поворота 7 управляемых системой управления 13, которая представляет собой бортовой компьютер.
Недостатками этого летательного аппарата является высокие требования быстродействия и сложности системы управления.
Наиболее близок по принципу функционирования робот Impass (4, 5), выбранный в качестве прототипа. Однако в существующем конструктивном исполнении он не сможет летать, даже если у него заменить форму опорных спиц на несущие плоскости и скорость их вращения.
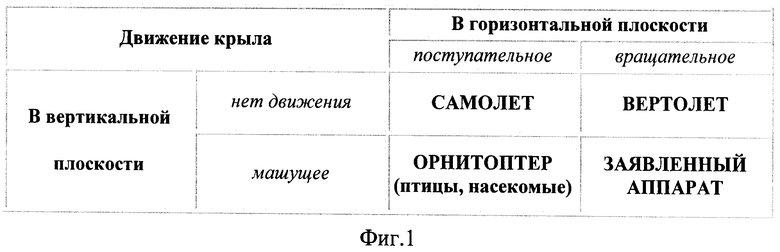
Все существующие крылатые способы полета сведены в таблицу (фиг.1) классификации крылатых летательных аппаратов по характеру движения крыла в горизонтальном полете.
Технической задачей настоящего изобретения является создание способа полета летательного аппарата, обеспечивающего более высокую скорость, чем махолеты и вертолеты при сохранении высокой маневренности, присущей вертолетам, и устранения старт-стопного режима движения крыла махолета.
Поставленная задача решается за счет того, что в способе полета летательного аппарата вертикально вращающиеся несущие плоскости перемещаются из верхнего исходного положения в нижнее, синхронно разворачиваясь на своей оси элементами наклона в заданные моменты времени под воздействием системы управления, создавая подъемную силу необходимой величины и тягу в выбранном направлении, а из нижнего положения в исходное верхнее перемещаются приводами внутри механизмов вращения по соответствующим направляющим. Таким образом, заявленный способ полета реализует принцип объединения движения машущего крыла в вертикальной плоскости махолета с вращательным движением ротора вертолета (фиг.2).
Примеры осуществления способа
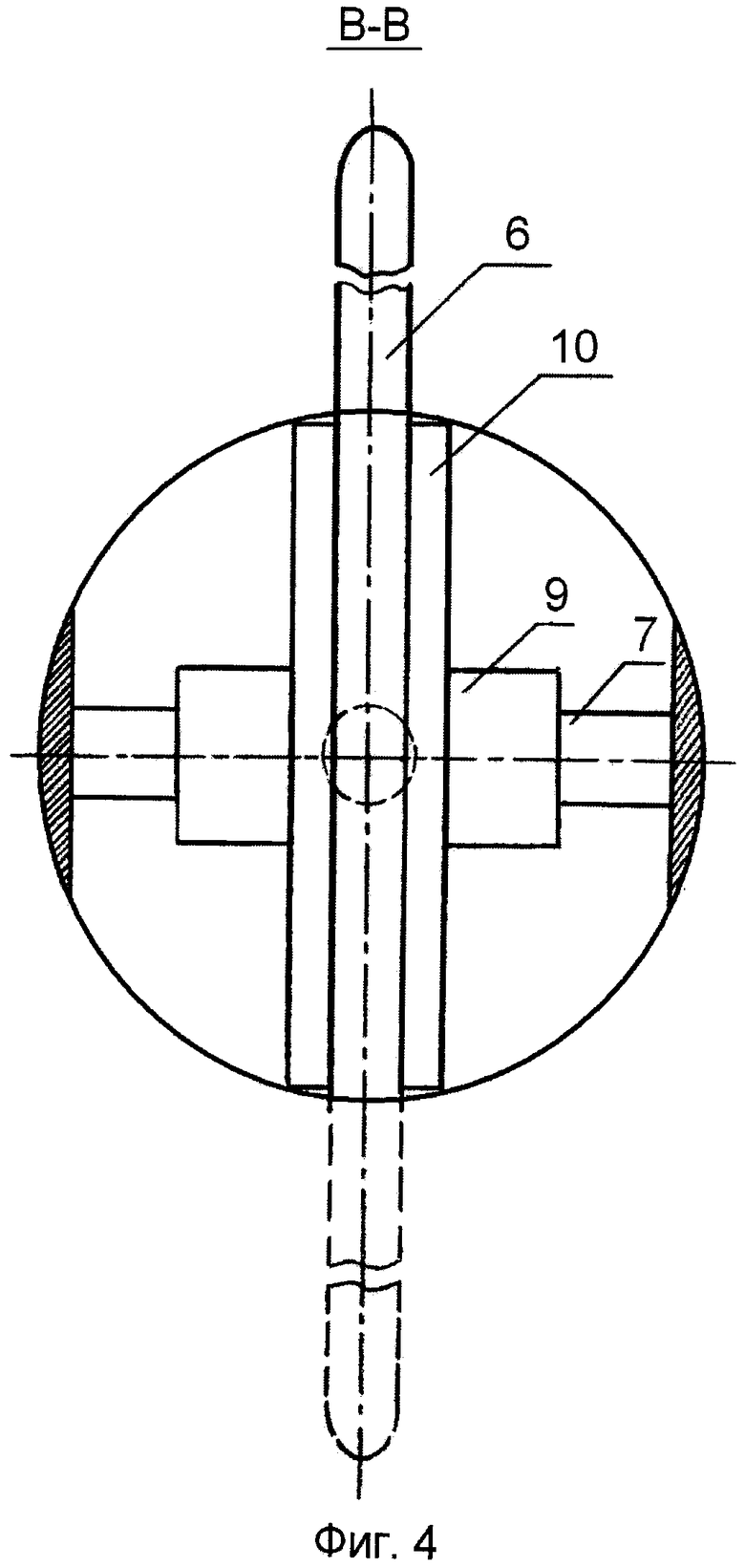
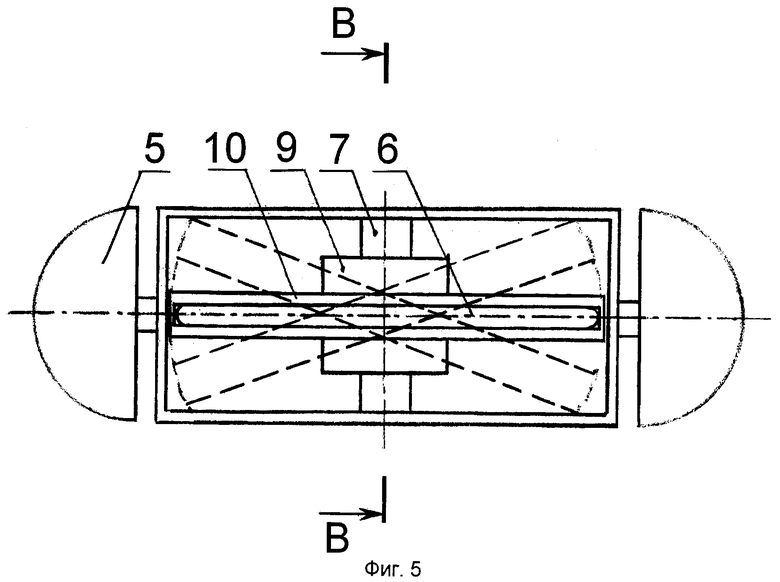
В режиме вертикального взлета (фиг.2) летательного аппарата двигатель 3 через редукторы 4 приводит механизмы вращения 5. Несущие плоскости 6 синхронно противоположно направленно вращаются из верхних точек 1 и 1', через точки 2 и 2' в нижние точки 3 и 3'. Достигнув точки 3 и 3', несущие плоскости 6 перемещаются приводами 9 внутри механизмов вращения 5 по соответствующим направляющим 10 в противоположное верхнее положение в верхних точках 1 и 1', заканчивая цикл вращения. Горизонтальное положение несущих плоскостей 6 задается элементами наклона 7 от системы управления 8, что обеспечивает в неподвижной среде вертикальный подъем летательного аппарата.
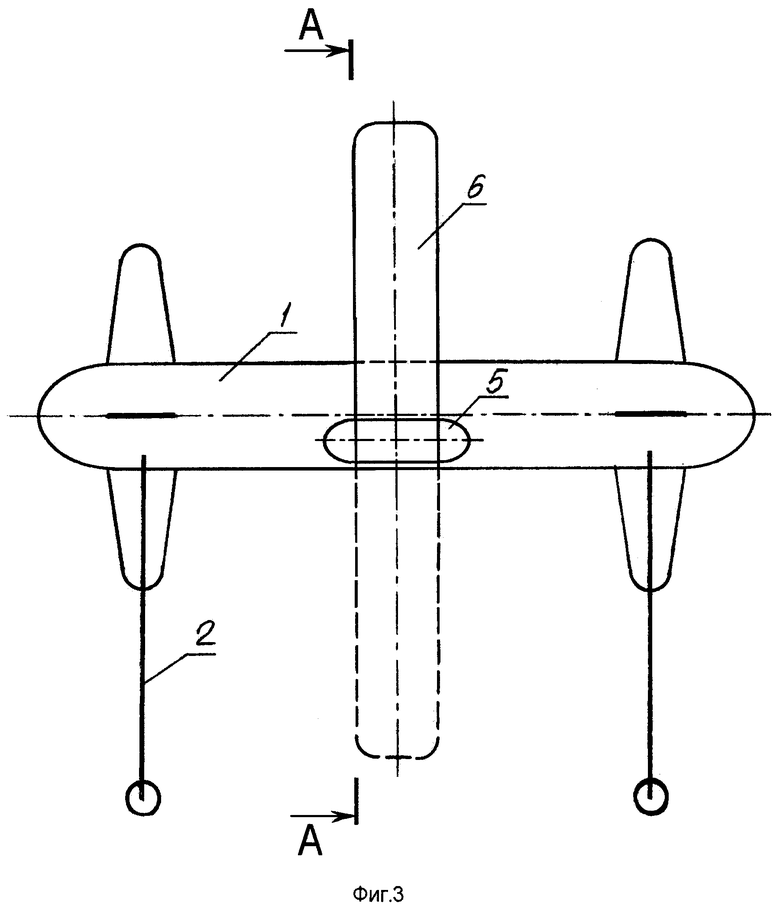
В режиме горизонтального полета летательного аппарата вперед или назад вдоль своей оси (фиг.3) несущие плоскости 6 наклоняются, создавая необходимый угол атаки для горизонтальной тяги. Способ обеспечивает заявленному летательного аппарату более высокую скорость, по сравнению с вертолетами и махолетами, за счет того, что вектор тяги при небольших углах атаки плоскости почти совпадает с направлением полета аппарата.
В режиме вертикального разворота летательного аппарата вокруг вертикальной оси несущие плоскости 6 движутся с противоположными углами атак, что создает тягу на первой несущей плоскости 6 в одну сторону, а на второй - в другую.
Кроме основных режимов способа полета, описанных выше, существуют множество других, являющихся комбинацией нескольких перечисленных режимов, кроме того возможно использовать принципы маневрирования самолета в полете.
Заявленный способ полета летательного аппарата поясняется чертежами:
- на фиг.1 - таблица существующих крылатых способов полета;
- на фиг.2 - вид спереди летательного аппарата (разрез);
- на фиг.3 - вид сбоку летательного аппарата;
- на фиг.4 - вид механизма вращения летательного аппарата (разрез);
- на фиг.5 - механизм вращения летательного аппарата (разрез).
Пример конкретной реализации
Заявленный способ полета реализован в летательном аппарате (фиг.3), представляющем собой фюзеляж 1 с посадочными шасси 2 и двигателем 3 с редукторами 4, обеспечивающими синхронизированное противоположно вращательное движение осей механизмов вращения 5 с установленными несущими плоскостями 6, причем в эти механизмы встроены элементы наклона 7 плоскостей 6 для изменения угла атаки под воздействием системы управления 8, вращающихся в вертикальной плоскости так, что часть цикла несущие плоскости 6 при движении вниз повернуты горизонтально или под углом атаки и образуют подъемную силу, а в оставшуюся часть цикла плоскости 6 перемещаются приводами 9 внутри механизмов вращения 5 по соответствующим направляющим 10 в противоположное верхнее положение, не препятствуя образованию подъемной силы, и начинают новый цикл вращательного движения. Система управления 8 представляет собой бортовой спецкомпьютер, выполняющий программу управления положением несущих плоскостей в заданные моменты для выполнения полета по заданной траектории.
Летательный аппарат функционирует следующим образом.
В исходном состоянии летательный аппарат стоит на шасси 2 и несущие плоскости 6 находятся в вертикальном положении с концами в верхних точках 1 и 1' соответственно. Двигатель 3 через редукторы 4 приводит механизмы вращения 5. Несущие плоскости 6 синхронно противоположно направленно начинают вращение через точки 2 и 2' в нижние точки 3 и 3'. Достигнув точки 3 и 3', несущие плоскости 6 перемещаются приводами 9 внутри механизмов вращения 5 по соответствующим направляющим 10 в противоположное верхнее положение в верхних точках 1 и 1'. Цикл вращения закончен. Положение несущих плоскостей 6 задается элементами наклона 7 от системы управления 8в зависимости от необходимого режима полета, согласно способу полета аппарата, описанного выше.
Летательный аппарат может иметь несколько пар плоскостей для более стабильного полета без вертикальных периодических колебаний.
Таким образом, предложенное техническое решение летательного аппарата при упрощении механизма конструкции обеспечивает более высокую скорость в режиме горизонтального полета, чем махолеты и вертолеты.
Источники информации:
1. Патент Российской Федерации №2298509.
2. Патент США №2529635.
3. Патент Российской Федерации №2387579.
4.http://www.romela.org/main/IMPASS:_Intelligent_Mobility_Platform_with_Active_Spoke_System.
5. http://www.3dnews.ru/news/gibrid_kolesa_i_nogi_dlya_robotov/.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2387579C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2006 |
|
RU2323129C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
Изобретение относится к авиационной технике, в частности к способам машущего полета и конструкциям махолетов. Способ машущего полета летательного аппарата основан на вращательном машущем движении пары плоскостей, создающих подъемную силу при движении из верхней в нижнюю точку вращения. Достигнув нижней точки вращения, плоскости перемещают внутри механизмов вращения линейно вертикально вверх в исходную точку вращения, не препятствуя образованию подъемной силы. Летательный аппарат состоит из фюзеляжа с посадочным шасси и двигателем с редукторами, обеспечивающими синхронизированное противоположно вращательное движение осей механизмов вращения с установленными несущими плоскостями. В механизмы вращения для изменения угла атаки встроены элементы наклона плоскостей, вращающихся в вертикальной плоскости так, что часть цикла плоскости при движении вниз повернуты горизонтально или под углом атаки и образуют подъемную силу, а в оставшуюся часть цикла несущие плоскости перемещаются приводами внутри механизмов вращения по соответствующим направляющим в противоположное верхнее положение. Обеспечивается повышение скорости полета при сохранении высокой маневренности. 2 н.п. ф-лы, 5 ил. 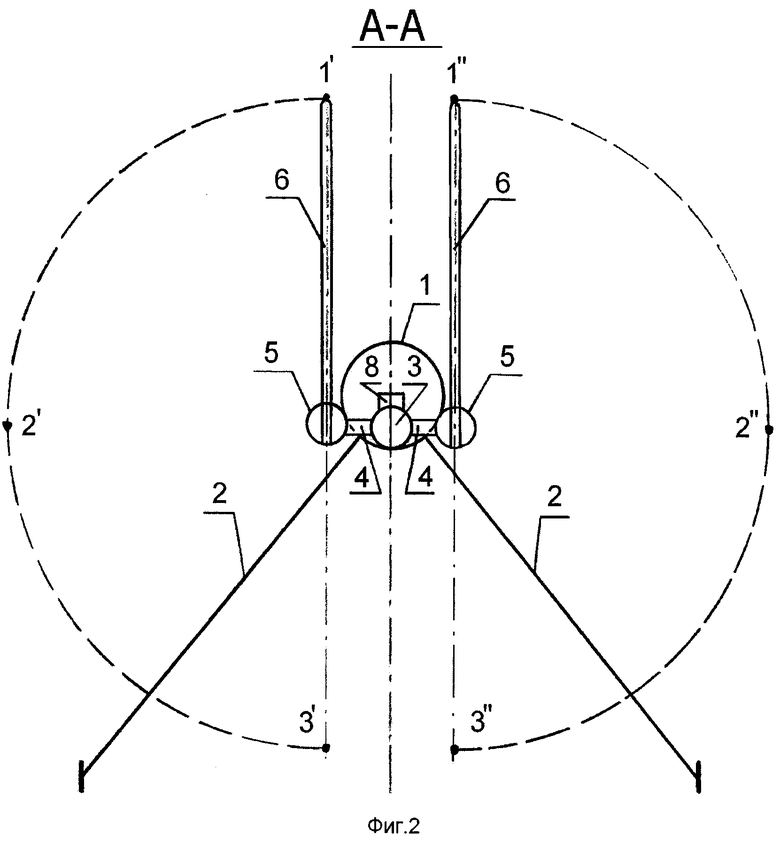
1. Способ машущего полета летательного аппарата, основанный на вращательном машущем движении пары плоскостей, создающих подъемную силу при движении из верхней в нижнюю точку вращения, отличающийся тем, что достигнув нижней точки вращения, плоскости перемещаются внутри механизмов вращения линейно вертикально вверх в исходную точку вращения, не препятствуя образованию подъемной силы, и начинают новый цикл вращательного движения.
2. Летательный аппарат, состоящий из фюзеляжа с посадочным шасси и двигателем с редукторами, обеспечивающими синхронизированное противоположно вращательное движение осей механизмов вращения с установленными несущими плоскостями, причем в эти механизмы встроены элементы наклона плоскостей для изменения угла атаки под воздействием системы управления, вращающихся в вертикальной плоскости так, что часть цикла плоскости при движении вниз повернуты горизонтально или под углом атаки и образуют подъемную силу, отличающийся тем, что в оставшуюся часть цикла несущие плоскости перемещаются приводами внутри механизмов вращения по соответствующим направляющим в противоположное верхнее положение, не препятствуя образованию подъемной силы, и начинают новый цикл вращательного движения.
| МАХОЛЕТ | 1997 |
|
RU2112703C1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО НИВЕЛЛИРОВАНИЯ | 1926 |
|
SU6742A1 |
| US 2002117583 A1, 29.08.2002 | |||
| US 6824094 B2, 30.11.2004. | |||

