Изобретение относится к машиностроению, а более конкретно к станкостроению, и может быть использовано в прецизионных станках с вертикально перемещающимися узлами.
Известны устройства для уравновешивания подвижных органов станков [1]. Недостатком известных устройств для уравновешивания подвижных органов станков является отсутствие контроля их положения относительно направляющих стойки.
Этот недостаток устранен в устройстве для уравновешивания подвижного органа [2], содержащем систему автоматического регулирования, включающую два датчика перемещения, установленных в корпусе гайки, связанной с рабочим органом, и соединенных с блоком управления, выход которого через управляемый золотник связан с дополнительным приводом, закрепленным на тяге троса с возможностью взаимодействия с упругим регулирующим элементом.
Недостатком такого устройства является затрудненная управляемость подвижным органом, из-за того, что уравновешивание осуществляется одним тросом, а усилие, развиваемое им, создает опрокидывающий момент, направленный только по часовой стрелке, относительно центра тяжести, что приводит к потере точности обработки заготовок.
Задачей настоящего изобретения является повышение управляемости подвижного узла путем введения второго троса.
Указанная задача достигается тем, что в известное устройство уравновешивания подвижного органа станка [2], содержащее шариковинтовой механизм, упругий элемент, тянущий трос, датчики перемещения, систему управления, управляемый золотник и привод гидравлического типа, вводится второй трос, который через систему блоков вместе с первым тросом крепится диаметрально противоположно оси шпинделя.
На фиг.1 изображен общий вид устройства управления подвижным узлом станка.
Устройство содержит подвижный узел 1, перемещающийся по направляющим 2 стойки, к которому через систему блоков 3 крепятся тросы 4 и 5, связанные через тяги 6 и 7 упругими элементами 8 и 9 с приводами гидравлического типа 10 и 11 соответственно, шариковинтовой механизм, винт 12 которого кинематически связан с ходовым винтом 13 посредством группы зубчатых колес 14, расположенных в основании 15, а гайка 16 ходового винта 13 перемещается синхронно с подвижным узлом 1. На гайке 17 шариковинтового механизма располагаются приводы гидравлического типа 10 и 11 управления подвижным узлом 1. Гайка 16 снабжена датчиками перемещения 18 и 19, вмонтированными в шариковинтовую пару, являющуюся измерительной базой, т.е. базой, относительно которой осуществляется контроль положения шпиндельного узла. Датчики перемещения 18 и 19 связаны с блоком управления 20, который через управляемые золотники 21 и 22 соответственно связан с масляной станцией 23.
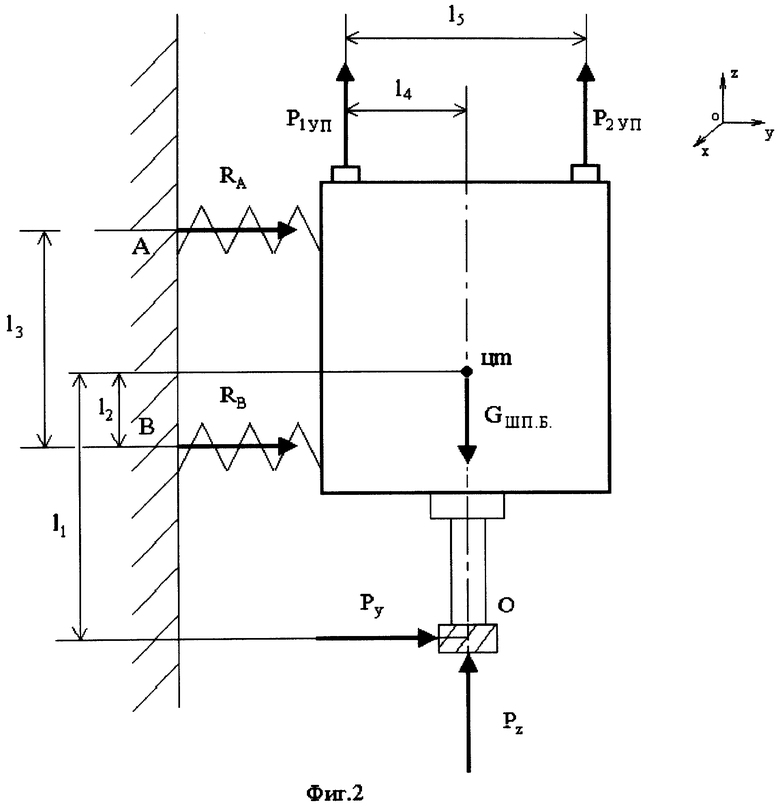
На фиг.2 представлена схема подвижного узла станка, перемещающегося по вертикальным направляющим стойки.
Управление положением осуществляется силами Р1УП и Р2УП развиваемых тросами. Вес подвижного узла представлен силой GШП.Б, а RA и RБ реакции, возникающие между узлом и направляющими. Ру и Рz - составляющие силы резания. Силы Р1УП и Р2УП могут быть определены расчетным путем при решении системы уравнений из условий:


В автоматическом режиме устройство управления подвижным узлом станка работает следующим образом.
Электрические сигналы датчиков перемещения 18 и 19, установленных в корпусе гайки 16 и контролирующих величины радиальных зазоров между гайкой 16 и ходовым винтом 13, поступают в блок управления 20, где сравниваются между собой, и в зависимости от знака разности на ту или иную катушку управляемых золотников 21 и 22 соответственно поступает управляющий сигнал. Давление рабочей жидкости, развиваемое масляной станцией 20, подается в одну из полостей гидроцилиндров 6 и 7 соответственно. При этом перемещение штоков гидроцилиндров приводит к изменению усилий Р1УП и Р2УП, создаваемых пружинами 21 и 22 соответственно. Работа устройства протекает в автоматическом режиме, и осуществляется до тех пор, пока разность рассогласования датчиков перемещения 14 и 15 не станет равной нулю.
Таким образом, устройство управления подвижным узлом станка позволяет существенно повысить управляемость шпиндельного узла, что приводит к повышению качества обработки.
Источники информации
1. А.с. №457549, МПК В 23 В 47/26. Устройство для уравновешивания подвижного органа / Ушаков К.П., БИ №3, 1975.
2. А.с. №1276445, МПК В 23 В 47/26. Устройство для уравновешивания подвижного органа/Горшков Б.М., Равва Ж.С., Осипов А.В., Батин В.Д., БИ №46, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания подвижного органа | 1985 |
|
SU1276445A2 |
| Устройство для уравновешивания подвижного органа | 1973 |
|
SU457549A1 |
| ГИДРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯУРАВНОВЕШИВАНИЯ ПОДВИЖНЫХ УЗЛОВМЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1971 |
|
SU420408A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| Колодочный тормоз с пружинным замыканием | 1977 |
|
SU617644A1 |
| Устройство для уравновешивания вертикально подвижного узла | 1982 |
|
SU1060340A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| Устройство для управления деформациями в системе СПИД | 1982 |
|
SU1071371A1 |
| Устройство для перемещения подвижного узла металлорежущего станка относительно неподвижного | 1979 |
|
SU1113233A1 |
Изобретение относится к машиностроению, а более конкретно к станкостроению, и может быть использовано в прецизионных станках с вертикально перемещающимися узлами. Сущность изобретения заключается в том, что устройство управления подвижным узлом станка, содержащее шариковинтовой механизм, упругий элемент, тянущий трос, датчики перемещения, систему управления, управляемый золотник и привод гидравлического типа, дополнительно снабжено вторым тянущим тросом, связанным упругим элементом с приводом гидравлического типа и закрепленным диаметрально противоположно оси шпинделя. Технический результат изобретения состоит в повышении качества обработки. 2 ил.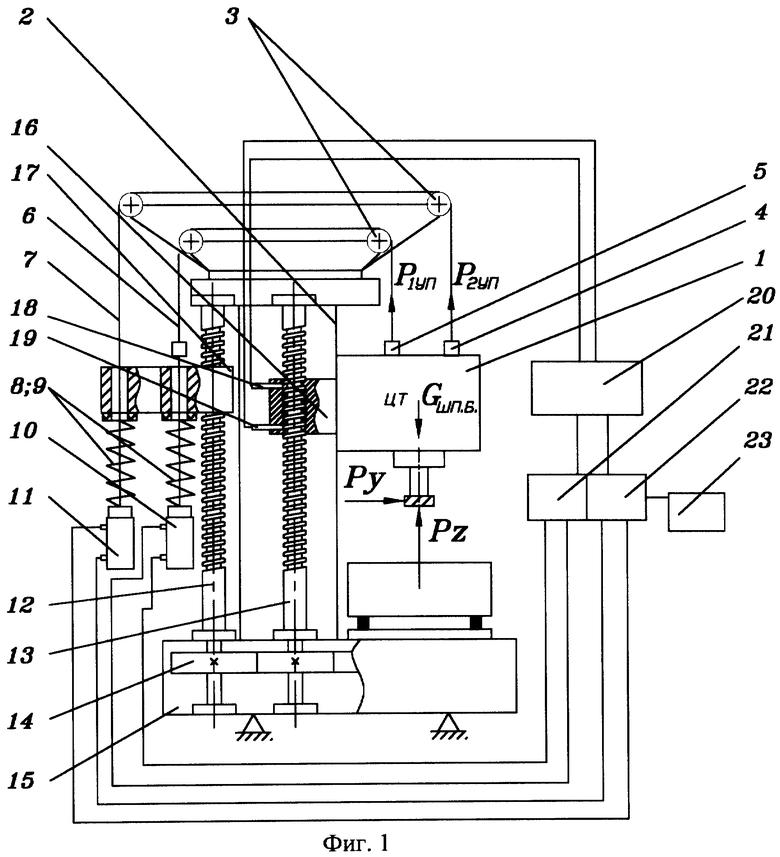
Устройство управления подвижным узлом станка, содержащее шариковинтовой механизм, упругий элемент, тянущий трос, датчики перемещения, систему управления, управляемый золотник и привод гидравлического типа, отличающееся тем, что оно снабжено вторым тянущим тросом, связанным упругим элементом с приводом гидравлического типа и закрепленным диаметрально противоположно оси шпинделя станка.
| Устройство для уравновешивания подвижного органа | 1985 |
|
SU1276445A2 |
| Устройство уравновешивания вертикально-подвижного узла | 1980 |
|
SU872200A1 |
| Устройство уравновешивания вертикально-подвижного узла металлорежущего станка | 1983 |
|
SU1117143A1 |
| US 3822961 А, 29.08.2002. | |||

