Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в системах защиты и управления грузоподъемных кранов.
Известен способ поддержки крановщика по обеспечению безопасной работы грузоподъемного крана, заключающийся в том, что измеряют рабочие параметры грузоподъемного крана, вводят их в вычислительное устройство и обрабатывают по заранее записанной в его памяти программе, в результате чего выявляют перегрузку крана и при ее наличии представляют на индикаторах информацию о необходимости выполнения крановщиком действий по устранению возникшей перегрузки, а также автоматически передают на исполнительное устройство сигнал блокировки (отключения) работы крана [1, 2].
Недостатком этого технического решения являются ограниченные функциональные возможности, поскольку крановщику предоставляется информация только о наличии перегрузки крана.
Более совершенным и наиболее близким к предложенному является способ поддержки крановщика по обеспечению безопасной работы грузоподъемного крана, заключающийся в том, что измеряют рабочие параметры грузоподъемного крана и, при необходимости, параметры состояния внешней среды, вводят их в вычислительное устройство и обрабатывают по заранее записанной в его памяти программе, в результате чего выявляют отклонение какого-либо параметра или режима работы крана от штатного, при наличии такого отклонения представляют на индикаторе или дисплее информацию о необходимости выполнения крановщиком действий по устранению возникшей аварийной ситуации, а также формируют на дисплее неподвижное изображение рабочей зоны крана и схематичное изображение кранового механизма в реальном масштабе времени (в динамике) [3, 4].
В этом техническом решении крановщику предоставляется не только информация о необходимости выполнения действий по устранению какой-либо возникшей аварийной ситуации, но и информация о значениях любого контролируемого рабочего параметра крана (по команде от клавиши, которую крановщик активизирует во время заданного режима работы крана). Кроме того, формирование визуального изображения рабочей зоны крана и движущегося на ней изображения кранового механизма дает возможность крановщику визуально оценить потенциальную возможность возникновения аварийных ситуаций.
Однако при этом осуществляется только формирование указанного изображения, а прогноз возможности возникновения аварийных ситуаций не производится и возлагается на крановщика. Имеющиеся в этом техническом решении рекомендации по безопасности сводятся только к выводу на дисплей грузовой характеристики крана и графического изображения рабочего процесса крана без каких-либо указаний на конкретные действия крановщика по управлению краном или по предотвращению аварийных ситуаций, что приводит к снижению безопасности работы крана.
Кроме того, в известном способе не рассматривается синтез или выбор наилучших действий крановщика или автоматической системы управления по выводу крана из аварийных ситуаций, не дается оценка величины времени до наступления аварийной ситуации и не проводится анализ ошибок крановщика при управлении краном. Это также приводит к снижению безопасности работы грузоподъемного крана.
Техническим результатом, на достижение которого направлено заявленное изобретение, является повышение безопасности работы крана при одновременном улучшении условий работы крановщика за счет:
- повышения надежности выбора решений крановщиком по управлению краном и соответственно уменьшения вероятности ошибочных действий, путем оперативной выработки для крановщика рекомендаций по принятию решений по управлению краном и определения приоритетных для безопасности крана действий крановщика с учетом прогноза развития возможных штатных и аварийных ситуаций;
- повышения эффективности, в том числе оперативности, восприятия, анализа и переработки крановщиком информации об обстановке при одновременном упрощении работы на кране (упрощении пользования прибором или системой безопасности);
- обеспечения контроля за деятельностью крановщика по предупреждению опасного развития штатных и аварийных ситуаций и соответственно возможности своевременной реализации профилактических мер, направленных на уменьшение его ошибок;
- обеспечения защиты от ошибочных или умышленных действий крановщика, приводящих к аварии крана, в том числе путем автоматического перехода от ручного управления краном к автоматическому.
В предложенном способе поддержки крановщика по обеспечению безопасной работы грузоподъемного крана, заключающемся в том, что измеряют рабочие параметры грузоподъемного крана и при необходимости параметры состояния внешней среды, вводят их в вычислительное устройство и обрабатывают по заранее записанной в его памяти программе, в результате чего выявляют отклонение по меньшей мере одного параметра или режима работы крана от штатного, при наличии такого отклонения представляют на индикаторе или дисплее информацию о необходимости выполнения крановщиком действий по устранению возникшей аварийной ситуации, поставленная техническая задача решается за счет того, что дополнительно при помощи вычислительного устройства по предварительно записанной в его памяти программе и математической модели осуществляют прогноз возникновения аварийной ситуации и величины времени до ее наступления, выявляют уменьшение величины этого времени до заранее установленного значения, после чего осуществляют дополнительное представление на индикаторе или дисплее информации о действиях крановщика по предотвращению угрозы возникновения аварийной ситуации.
При этом указанный прогноз возникновения аварийной ситуации осуществляют с помощью экспертной системы прогноза аварийных (катастрофических) ситуаций, для чего предварительно путем экспертных оценок, основанных, в частности, на анализе причин предыдущих аварий грузоподъемных кранов, создают базу данных о сочетании рабочих параметров крана, создающих потенциальную опасность в его работе, сохраняют эту базу данных на грузоподъемном кране и далее используют ее при работе вычислительного устройства для прогноза возникновения аварийной ситуации.
В базу данных о сочетании рабочих параметров крана, создающих потенциальную опасность в его работе, включают, в частности, поворот крана с грузом в сторону его меньшей устойчивости, а в качестве прогнозируемой аварийной ситуации принимают потерю устойчивости (опрокидывание) крана, при этом прогноз величины времени до наступления этой аварийной ситуации осуществляют на основании скорости изменения угла азимута и текущего значения грузовой устойчивости крана. В этом случае при дополнительном представлении на индикаторе или дисплее информации о действиях крановщика по предотвращению угрозы возникновения указанной аварийной ситуации, осуществляют отображение информации о необходимости уменьшить вылет грузозахватного органа или откинуть противовес крана.
Дополнительно для достижения указанного технического результата путем экспертных оценок может создаваться база данных о наиболее целесообразной последовательности действий крановщика по безопасному управлению краном в различных режимах его работы, которая сохраняется на грузоподъемном кране и далее используется при работе вычислительного устройства для формирования на индикаторе или дисплее информации о действиях крановщика по предотвращению угрозы возникновения аварийной ситуации. При этом формирование на индикаторе или дисплее информации о действиях крановщика по предотвращению угрозы возникновения аварийной ситуации может осуществляться, в частности, путем выбора из указанной базы данных наиболее целесообразной последовательности действий крановщика, соответствующих текущему сочетанию рабочих параметров грузоподъемного крана.
Кроме того, для получения необходимого технического результата с помощью вычислительного устройства может предварительно определяться безопасная траектория перемещения груза краном, а указанное дополнительное представление на индикаторе или дисплее информации о действиях крановщика по предотвращению угрозы возникновения аварийной ситуации может производиться с учетом реализации указанной траектории. Для этого предварительно определяют или вводят в вычислительное устройство в ручном режиме начальную и конечную точки перемещения стрелы или груза при выполнении грузоподъемной операции, после чего определяют указанную безопасную траекторию перемещения груза краном. Предварительное определение начальной и конечной точки перемещения стрелы или груза при выполнении грузоподъемной операции может осуществляться путем установки стрелы без груза или грузозахватного органа крана в начальное и конечное положение и запоминания этих положений, или при помощи бесконтактного, например лазерного, измерителя координат начального и конечного положения груза, работа которого поддерживается вычислительным устройством.
В вычислительное устройство дополнительно в ручном режиме может вводиться значение веса понимаемого груза, либо значение этого веса может определяться на начальной стадии выполнения грузоподъемной операции, с последующим выявлением при помощи вычислительного устройства возможности безопасного перемещения этого груза в конечную точку, с представлением на индикаторе или дисплее соответствующей информации для крановщика или автоматической блокировки (запрета) работы крана при отсутствии такой возможности.
Достижение заявленного технического результата может обеспечиваться также за счет того, что дополнительно выявляют уменьшение величины времени до наступления аварийной ситуации до значения, соответствующего времени предотвращения этой ситуации автоматической системой управления краном, после чего осуществляют автоматическое формирование сигналов управления краном, в частности автоматически запрещают его дальнейшую работу.
Дополнительно, для достижения необходимого технического результата, путем экспертных оценок, основанных, в частности, на анализе причин предыдущих аварий грузоподъемных кранов, создают базу данных характеристик аварийных ситуаций грузоподъемного крана и базу данных о наилучших (приоритетных) действиях по управлению краном в аварийных ситуациях, сохраняют эти базы данных на грузоподъемном кране и далее используют их при работе вычислительного устройства для представления на индикаторе или дисплее информации по наилучшим (приоритетным) действиям крановщика по выходу из аварийной ситуации или для формирования сигналов автоматического управления краном в аварийных ситуациях. Эти базы данных могут быть представлены в виде сочетаний (наборов, комбинаций) значений рабочих параметров крана в различных аварийных ситуациях и сигналов наилучшего управления краном, соответствующих каждому из этих сочетаний. В этом случае при работе грузоподъемного крана после измерения рабочих параметров грузоподъемного крана и ввода их в вычислительное устройство выявляют наличие такого сочетания и осуществляют выбор сигналов наилучшего управления краном, соответствующих выявленному сочетанию.
Кроме того, для достижения необходимого технического результата, дополнительно, например на основе данных экспертов, создают базу данных об ошибках или умышленно неправильных действиях крановщика при управлении грузоподъемным краном, сохраняют эту базу данных на грузоподъемном кране, а в процессе работы крана после измерения и введения в вычислительное устройство данных о рабочих параметрах крана, дополнительно путем обработки этих данных вычислительным устройством с использованием указанной базы данных осуществляют оценку правильности действий крановщика, после чего дополнительно представляют результаты этой оценки на индикаторе или дисплее. Эта база данных может быть представлена, в частности, в виде сочетаний (наборов, комбинаций) значений управляющих воздействий крановщика и рабочих параметров крана, по меньшей мере одно из которых отличается от штатного.
При этом результаты оценки правильности действий крановщика дополнительно записывают в энергонезависимое запоминающее устройство с возможностью считывания в случае необходимости.
Для получения указанного технического результата дополнительно выявляют начало работы грузоподъемного крана, например, путем выявления момента времени включения напряжения питания системы управления грузоподъемного крана, после чего из энергонезависимого запоминающего устройства дополнительно считывают данные о результате оценки правильности действий крановщика за предыдущий период работы грузоподъемного крана и представляют их на индикаторе или дисплее. Кроме того, на этих индикаторе или дисплее дополнительно представляют информацию о том, что данные о рабочих параметрах грузоподъемного крана или действия крановщика по управлению грузоподъемным краном записываются в энергонезависимое запоминающее устройство.
Достижение заявленного технического результата обеспечивается также благодаря тому, что представление информации на дисплее о необходимости выполнения крановщиком действий по управлению краном осуществляют с применением мультипликации, либо представляют эту информацию в виде системы пиктографических знаков, дифференцированных по степени отклонения контролируемых параметров от штатных и отражающих оценку степени безопасности крана. Дополнительно в энергонезависимое запоминающее устройство может предварительно записываться информация о правилах безопасной эксплуатации грузоподъемного крана, которая по командам крановщика или автоматически при помощи вычислительного устройства может быть выведена (представлена) на индикатор или дисплей.
Из приведенных признаков наиболее важными отличительными признаками заявленного способа являются:
- автоматический прогноз возникновения аварийной ситуации и величины времени до ее наступления с использованием математической модели крана;
- реализация этого прогноза с помощью экспертной системы прогноза аварийных (катастрофических) ситуаций, включающей в себя базу данных о сочетании рабочих параметров крана, создающих потенциальную опасность в его работе;
- создание путем экспертных оценок базы данных о наиболее целесообразной последовательности действий крановщика по безопасному управлению краном в различных режимах его работы и использование ее для формирования рекомендаций крановщику по предотвращению угрозы возникновения аварийных ситуаций;
- автоматическое представление на индикаторе или дисплее рекомендаций крановщику о его действиях по предотвращению угрозы возникновения аварийной ситуации при уменьшении времени до возникновения аварийной ситуации;
- определение безопасной траектории перемещения груза краном и формирование рекомендаций крановщику по управлению краном с учетом этой траектории;
- ввод в вычислительное устройство (или определение на начальной стадии выполнения грузоподъемной операции) значения веса поднимаемого груза с последующим определением возможности его безопасного перемещения в конечную точку и при отсутствии такой возможности представление на индикаторе или дисплее соответствующей информации для крановщика или автоматическая блокировка работы крана;
- выявление уменьшения времени до наступления аварийной ситуации до значения, соответствующего времени предотвращения этой ситуации автоматической системой управления краном, с последующим автоматическим переходом от ручного управления краном к автоматическому;
- создание базы данных характеристик аварийных ситуаций грузоподъемного крана и базы данных о наилучших (приоритетных) действиях по управлению краном в различных аварийных ситуациях и использование этих баз данных для предоставления крановщику рекомендаций по его наилучшим (приоритетным) действиям по выходу из каждой аварийной ситуации или для формирования соответствующих сигналов автоматического управления краном;
- создание базы данных об ошибках или умышленно неправильных действиях крановщика при управлении грузоподъемным краном и использование этой базы данных для оценки правильности действий крановщика, с последующим отображением результатов этой оценки на индикаторе или дисплее и записью в энергонезависимое запоминающее устройство;
- использование для представления информации на дисплее мультипликации, а также пиктографических знаков, дифференцированных по степени отклонения контролируемых параметров от штатных и отражающих оценку степени безопасности крана;
- запись в энергонезависимое запоминающее устройство информации о правилах безопасной эксплуатации грузоподъемного крана и ее последующее воспроизведение на дисплее.
Ранее эти признаки в устройствах и системах сигнализации, защиты или управления грузоподъемных кранов не использовались. Применение этих признаков в других областях техники для повышения безопасности работ при одновременном улучшении условий работы оператора-крановщика также неизвестно.
Реализация этих признаков приводит к уменьшению вероятности ошибочных действий крановщика, к повышению эффективности, в том числе оперативности, восприятия, анализа и переработки крановщиком информации об обстановке, обеспечивает защиту от ошибочных или умышленных действий крановщика, приводящих к аварии крана, а также позволяет осуществить контроль за деятельностью крановщика по предупреждению опасного развития штатных и аварийных ситуаций и соответственно дает возможность своевременно реализовать профилактические меры по снижению аварийности работы грузоподъемного крана.
Очевидно, что это приводит к существенному повышению безопасности работы крана при одновременном улучшении условий работы крановщика. Поэтому указанные отличительные признаки предложенного технического решения находятся в непосредственной причинно-следственной связи с достигаемым техническим результатом.
На чертеже в качестве примера приведена система безопасности грузоподъемного крана, выполненная в виде экспертной системы и поясняющая сущность предложенного способа поддержки крановщика по обеспечению безопасной работы грузоподъемного крана.
Система безопасности (экспертная система) содержит подсистему взаимодействия с внешней средой 1, подсистему прогноза поведения крана 2, информационную подсистему 3 и подсистему взаимодействия с крановщиком 4. Все указанные подсистемы 1-4 объединены через интеллектуальный контроллер 5, который организует обмен данными между подсистемами и внешними каналами связи.
Каждая из подсистем 1-4 и интеллектуальный контроллер 5 реализованы программно на основе вычислительных устройств, каждое из которых содержит микроконтроллер, блоки памяти, в том числе энергонезависимой памяти программ и данных, и периферийные устройства. Возможна также реализация нескольких подсистем 1-4 и интеллектуального контроллера 5 на основе одного вычислительного устройства, вычислительные ресурсы которого выбираются из условия возможности реализации всех возложенных на него функций.
Подсистема взаимодействия с внешней средой 1 включает в себя:
- устройство (или блок) идентификации ситуации 6, выполненное в виде датчиков рабочих параметров грузоподъемного крана (например, датчиков угла наклона и длины стрелы, датчика азимута, датчика приближения к линии электропередачи, датчика нагрузки, датчика положения грузозахватного органа и т.д.), датчиков параметров окружающей среды (датчика скорости ветра, датчика температуры окружающей среды и т.д.) и датчиков управляющих воздействий крановщика (набора кнопок-клавиш на пульте управления прибором (системой) безопасности, датчиков положения рычагов управления гидравлическими распределителями и т.д.);
- устройства (или блока) проверки информации на достоверность 7, реализованного программно или аппаратно, обеспечивающего подтверждение правильности, точности и полноты восприятия информации блоком 6;
- устройства (или блока) идентификации решаемой задачи 8, реализованного программно или аппаратно и обеспечивающего выявление выполняемой задачи или режима работы грузоподъемного крана в данный момент времени (например, транспортного состояния крана, режима подъема груза, режима перемещения груза, режима возврата стрелы или грузозахватного органа в исходное состояние и т.д.).
Подсистема прогноза поведения крана 2 включает в себя:
- базу (блок памяти) данных моделей крана (или данных моделей составных частей крана) 9, представленную, в частности, в виде набора коэффициентов или параметров математических моделей, в том числе с учетом возможных изменений этих коэффициентов и параметров, вызванных аварийными ситуациями и неисправностями грузоподъемного крана, а также предельных (отличающихся от штатных) значений рабочих параметров крана, включая грузовую характеристику крана, и параметров окружающей среды;
- базу (блок памяти) моделей крана (или моделей составных частей крана) 10, представленную, в частности, в виде программы решения системы уравнений, представляющих эти модели;
- блок прогноза поведения крана в штатном режиме 11, реализованный программно и обеспечивающий возможность по данным 9 и математическим моделям 10 вычислить ожидаемые значения рабочих параметров грузоподъемного крана в динамике, а также время до возникновения аварийной ситуации;
- блок прогноза поведения крана в аварийной ситуации 12, реализованный программно и обеспечивающий возможность по данным 9 и математическим моделям 10 дать прогноз изменения рабочих параметров грузоподъемного крана в различных аварийных ситуациях, в том числе при наличии неисправностей грузоподъемного крана.
Информационная подсистема 3 включает в себя:
- базы (или блоки памяти) справочных данных 13, включающие в себя базу данных о сочетании рабочих параметров крана, создающих потенциальную опасность в его работе, базу данных характеристик аварийных ситуаций грузоподъемного крана, базу данных о наилучших (приоритетных) действиях по управлению краном в штатном и аварийном режимах его работы, базу данных об ошибках или умышленно неправильных действиях крановщика при управлении грузоподъемным краном, базу графических пиктографических знаков и мультипликационных изображений для поддержки работы дисплея и базу данных о правилах безопасной эксплуатации грузоподъемного крана;
- блок тестирования и диагностики технического состояния системы безопасности 14, включающий в себя соответствующий набор программных и аппаратных средств (в частности, при реализации всех подсистем со встроенными функциями самодиагностики (самотестирования), блок тестирования и диагностики 14 осуществляет сбор и анализ диагностических данных, поступающих от подсистем 1-4);
- регистратор параметров 15, выполненный в виде энергонезависимого запоминающего устройства с возможностью записи в него и считывания данных о рабочих параметрах грузоподъемного крана, данных о параметрах внешней среды, а также данных об управляющих воздействиях крановщика, включая допущенные им ошибки и умышленно неправильные действия;
- канал связи с внешними устройствами 16, выполненный в виде радиоканала, например по стандарту GSM, GPRS, ZigBee или Bluetooth или канала инфракрасной связи по стандарту IRDA или в виде контроллера/драйвера проводной линии связи по какому-либо стандарту, например по RS-485 или RS-232C.
Подсистема взаимодействия с крановщиком 4 включает в себя:
- блок синтеза наилучших решений по управлению краном 17, реализующий программным путем выбор наилучшего решения по управлению краном на основании соответствующих баз справочных данных 13 и результатов прогноза поведения крана в штатном режиме 11 и в аварийной ситуации 12;
- блок информационной поддержки крановщика 18, содержащий дисплей, в частности графический, и (или) набор индикаторов, например светодиодных, а также соответствующий контроллер дисплея и (или) индикаторов;
- блок оценки действий крановщика 19, выявляющий программным путем ошибки и умышленно неправильные действия крановщика с использованием идентификации решаемой задачи 8 и базы справочных данных 13;
- блок поддержки принятия решений 19, реализующий, с использованием базы справочных данных 13 и прогноза поведения крана в штатном режиме 11 или в аварийной ситуации 12, автоматический переход от ручного управления краном к автоматическому при наличии опасности возникновения или неблагоприятного развития аварийной ситуации, в том числе при бездействии или при неправильных действиях крановщика.
Поясним суть предложенного способа на примере работы реализующей его системы.
Предварительно путем экспертных оценок, например при анализе ранее произошедших аварий грузоподъемных кранов, анализе требований и рекомендаций нормативных документов (правил безопасного производства работ, инструкций по охране труда, руководства по эксплуатации грузоподъемного крана и т.д.), рекомендаций специалистов-экспертов по наиболее рациональному управлению краном в штатных режимах и в аварийных ситуациях, а также на основании расчетов, выполненных при проектировании грузоподъемного крана, создаются базы данных:
- сочетаний рабочих параметров крана, создающих потенциальную опасность в его работе;
- характеристик аварийных ситуаций грузоподъемного крана;
- наилучших (приоритетных) действий по управлению краном в штатном и аварийном режимах его работы;
- ошибках или умышленно неправильных действий крановщика;
- графических пиктографических знаков и мультипликационных изображений работы крана;
- наиболее важных правил безопасной эксплуатации грузоподъемного крана, которые целесообразно представлять на дисплее.
Возможная процедура создания этих баз данных состоит в следующем.
Группа экспертов рассматривает различные аварийные ситуации грузоподъемного крана, в том числе вызванные техническими неисправностями крана, и определяет наиболее рациональные действия крановщика или автоматической системы по управлению краном в каждой отдельно взятой ситуации. Эти рекомендации обобщаются. Далее каждой аварийной ситуации сопоставляется определенный набор рабочих параметров крана, параметров окружающей среды и при необходимости управляющих воздействий крановщика. Если при этом необходимы численные значения каких-либо параметров, то они определяются расчетным путем. В результате этого сопоставления реализуется идентификация каждой аварийной ситуации. Далее каждой аварийной ситуации, в соответствии с обобщенными рекомендациями экспертов, сопоставляются данные о наиболее рациональных управляющих действиях крановщика или автоматической системы управления. В итоге формируется база данных о наилучших (приоритетных) действиях по управлению краном в штатных и аварийных режимах его работы.
База данных графических пиктографических знаков и мультипликационных изображений работы крана, а также наиболее важных правил безопасной эксплуатации грузоподъемного крана, также формируется на основе экспертных оценок. Группа экспертов дает рекомендации, какие именно пиктографические знаки, мультипликационные изображения и пункты правил безопасной эксплуатации грузоподъемного крана, в каких режимах работы крана и в какие периоды времени целесообразно отображать на дисплее для информационной поддержки крановщика (блок 18). Далее аналогичным образом каждому пиктографическому знаку, мультипликационному изображению и пункту правил безопасной эксплуатации грузоподъемного крана сопоставляется определенный набор рабочих параметров крана, параметров окружающей среды и при необходимости управляющих воздействий крановщика, при которых соответствующая информация выводится на дисплей. В результате чего и формируется эта база данных.
Аналогичным образом формируются другие указанные базы данных.
Информация в этих базах данных, зависящая от конструкции конкретного грузоподъемного крана, может быть представлена в виде многомерных таблиц или функций, аргументами которых являются рабочие параметры грузоподъемного крана, параметры внешней среды и управляющие воздействия крановщика. Эта информация записывается в память базы справочных данных 13 до начала работы грузоподъемного крана.
База данных о сочетаниях рабочих параметров крана, создающих потенциальную опасность в его работе, в частности величины нагрузок, допустимых для различных пространственных положений ее стрелы или грузозахватного органа, сохраняется в базе данных моделей 9. Дополнительно, перед началом работы грузоподъемного крана, в базу данных моделей 9 крановщик, с помощью кнопок-клавиш пульта управления прибором (системой) безопасности, входящего в устройство идентификации ситуации 6, вводит дополнительные параметры, характеризующие геометрию или условия работы грузоподъемного крана, включая максимально допустимые (пороговые или предельные) значения отдельных рабочих параметров. Количество, вид и значения этих параметров определяются конструкцией конкретного грузоподъемного крана и требованиями к его безопасной эксплуатации. К ним относятся, в частности, ограничения по координатной защите (максимально допустимые значения отдельных координат пространственного положения стрелы), вид используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура, степень запасовки грузового полиспаста, напряжение в линии электропередачи (для реализации защиты от опасного приближения к линии электропередачи) и т.д.
Вычислительные устройства (микроконтроллеры) всех подсистем 1-4 и интеллектуального контроллера 5 работают по программам, которые разрабатываются при проектировании системы безопасности (экспертной системы) и также записываются в соответствующие энергонезависимые запоминающие устройства (в блоки памяти программ) до начала работы грузоподъемного крана.
После включения системы микроконтроллер подсистемы взаимодействия с внешней средой 1, работая по программе, путем опроса датчиков рабочих параметров крана, датчиков параметров внешней среды и датчиков управляющих воздействий крановщика, осуществляет идентификацию текущей ситуации (блок 6), проверку полученной информации на достоверность (блок 7) и последующую идентификацию решаемой грузоподъемным краном задачи (блок 8).
Далее, для данной решаемой задачи микроконтроллер подсистемы прогноза поведения крана 2 с использованием моделей 10 и базы данных моделей 9 осуществляет оценку текущего состояния и прогноз изменения рабочих параметров крана, т.е. определяет предстоящие (ожидаемые) значения усилий, пространственного положения стрелы и т.д. После чего эта подсистема 2 путем сопоставления этого прогноза (ожидаемых или прогнозируемых значений рабочих параметров крана) с сохраненной в блоке 13 базой данных о сочетаниях рабочих параметров грузоподъемного крана, создающих потенциальную опасность в его работе, осуществляет прогноз возникновения аварийных ситуаций, включая прогноз времени их возникновения. Далее результаты этого прогноза через интеллектуальный контроллер 5 передаются в подсистему взаимодействия с крановщиком 4.
Блок синтеза наилучших решений по управлению краном 17 после получения результатов прогноза поведения крана в штатном режиме программным путем с использованием соответствующей базы справочных данных 13 реализует выбор наилучшего решения по управлению краном и отображает эту информацию на дисплее, входящем в блок информационной поддержки крановщика 18.
При этом дополнительно осуществляется сравнение величины прогнозируемого интервала времени до возникновения аварийной ситуации с заранее установленными значениями. Установленные значения времени до наступления аварийных ситуаций, при которых целесообразно передавать крановщику необходимые информационные сообщения, определяются путем экспертных оценок для каждого движения грузоподъемного крана и для каждого режима его работы. Очевидно, что это время, с одной стороны, должно быть выбрано из условия исключения предоставления крановщику преждевременной (излишней) информации, а с другой стороны должно быть достаточным для того, чтобы крановщик мог своевременно среагировать на потенциальную опасность и предотвратить возможную аварию крана. Полученные величины интервалов времени сохраняются в базе справочных данных 13.
Например, в базу данных о сочетании рабочих параметров крана, создающих потенциальную опасность в его работе, входящую в состав баз справочных данных 13, включают поворот крана с грузом в сторону его меньшей устойчивости, а в качестве прогнозируемой аварийной ситуации принимают потерю устойчивости (опрокидывание) крана. При этом прогноз величины времени до наступления этой аварийной ситуации в блоке 11 осуществляют на основании скорости изменения угла азимута, получаемой с блока идентификации ситуации 6 и значения грузовой устойчивости крана, предварительно записанного в базе данных моделей 9. В этом случае при представлении на дисплее блока информационной поддержки крановщика 18 информации о действиях крановщика по предотвращению угрозы возникновения указанной аварийной ситуации, выявленных блоком синтеза наилучших решений по управлению краном 17, осуществляют отображение информации о необходимости уменьшить вылет грузозахватного органа или откинуть противовес крана.
Подобным образом осуществляется также работа системы в аварийных режимах работы крана. Основное отличие при этом заключается в выборе других баз данных - базы характеристик аварийных ситуаций грузоподъемного крана и базы данных по наилучшим (приоритетным) действиям по управлению краном в аварийном режиме. В этом режиме, очевидно, задача предотвращения аварий не рассматривается, а целью функционирования системы является выход с наименьшими потерями из аварийной ситуации, уже возникшей по каким-либо причинам (например, вследствие механического повреждения крана). В данном случае фактически рассматривается вопрос о выработке рекомендаций крановщику в части выбора наиболее оптимального (наилучшего) действия из нескольких альтернативных. Если, например, автомобильный стреловой кран был установлен на опорах на грунте с низкой несущей способностью и при повороте крана в сторону одной из его опор, произошла просадка грунта под этой опорой, т.е. возникла аварийная ситуация, то экспертная система дает конкретные рекомендации, каким образом целесообразнее всего выйти из этой аварийной ситуации - прекратить поворот крана или уменьшить вылет путем втягивания стрелы или опустить груз и т.д. Причем очевидно, что наиболее правильные действия крановщика зависят от конструкции конкретного грузоподъемного крана и стадии развития данной аварийной ситуации, что и подлежит определению с помощью экспертных оценок и внесению результатов этих оценок в соответствующую базу данных (одну из баз справочных данных 13).
В данной системе рассматривается одновременная работа и крановщика, и автоматической системы управления. Причем при прочих равных условиях предпочтение отдается крановщику, т.е. человек остается главным звеном системы управления краном. Именно он ставит цели управления, планирует, направляет и контролирует весь рабочий процесс.
Однако в случае его бездействия или неправильных действий возможно уменьшение величины времени до наступления аварийной ситуации до значения, соответствующего предельно возможному времени предотвращения этой ситуации автоматической системой управления краном. В этом случае блок поддержки принятия решений 19 с использованием базы справочных данных 13 и прогноза поведения крана в штатном режиме 11 или в аварийной ситуации 12 осуществляет автоматический переход от ручного управления краном к автоматическому, т.е. автоматически (независимо от крановщика) формирует сигналы управления краном, в частности запрещает дальнейшую работу крана, предотвращая неблагоприятное развитие ситуации.
Значения интервалов времени, необходимых для предотвращения аварийных ситуаций автоматической системой управления краном, зависят от конструкции крана и его конкретного исполнительного механизма, определяются экспериментальным путем или при проектировании грузоподъемного крана и составляют одну из баз справочных данных 13.
Каждое вмешательство автоматической системы в управление краном идентифицируется как ошибочное или неправильное действие крановщика. Дополнительно, путем экспертных оценок, создается и запоминается база данных об ошибках или умышленно неправильных действий крановщика. Вопросы о том, какие именно действия крановщика следует считать ошибками или умышленно неправильными, решается экспертами. К таким действиям могут быть отнесены, в частности, попытки быстрого поворота крана с большим грузом на крюке, подтаскивание груза краном и т.д.
Все ошибочные или умышленно неправильные действия крановщика и приравненные к ним вмешательства автоматизированной системы в управление краном (автоматические действия системы по предотвращению ошибок крановщика) выявляются блоком оценки действий крановщика 19 программным путем с использованием выходных данных блока идентификации ситуации 6, баз справочных данных 13 и записываются в регистратор параметров 15. Одновременно в этот регистратор записываются данные о рабочих параметрах крана, данные о параметрах внешней среды и управляющих воздействиях крановщика, что предусмотрено действующими нормативными документами по регистраторам параметров грузоподъемных кранов.
Одновременно данные о работе грузоподъемного крана, включая данные регистратора параметров 15, с использованием каналов связи 16 могут быть переданы на какое-либо внешнее устройство, например компьютер или блок считывания данных регистратора параметров, или переданы в глобальную информационную сеть Интернет.
Известно, что значительная часть аварий грузоподъемных кранов вызвана безответственностью крановщиков и сознательным нарушением установленных правил безопасного производства работ. Из опыта эксплуатации грузоподъемных кранов установлено, что число нарушений правил значительно уменьшается, если все неправильные действия крановщика фиксируются и об этом известно крановщику.
Поэтому в предложенном способе после оценки правильности действий крановщика блоком 19 производится вывод результатов этой оценки на дисплей в блоке информационной поддержки крановщика 18. Кроме того, на этот дисплей дополнительно выводится информация о том, что все действия крановщика по управлению грузоподъемным краном записываются в регистратор параметров 15 (например, путем отображения специального символа).
Кроме того, дополнительно в начале работы грузоподъемного крана, например после включения напряжения питания системы, выявляемого блоком 6, из регистратора параметров 15 (энергонезависимого запоминающего устройства) считывают данные о результатах оценки правильности действий крановщика за предыдущий период работы грузоподъемного крана и представляют их на индикаторе или дисплее. Это представление, в частности, может быть в виде текстового сообщения, например "За предыдущую рабочую смену Вы неоднократно нарушали правила безопасности" или "Вы работали без ошибок, благодарим Вас за безопасную работу" и т.д.
Дополнительно в энергонезависимое запоминающее устройство (в базы справочных данных 13) может предварительно записываться информация о правилах безопасной эксплуатации грузоподъемного крана, которая по командам крановщика или автоматически при помощи вычислительного устройства - микроконтроллера может быть выведена на индикатор или дисплей блока информационной поддержки крановщика 18. При этом очевидно, что периодическое напоминание о наиболее важных правилах безопасной эксплуатации грузоподъемного крана способствует уменьшению количества нарушений этих правил и соответственно приводит к повышению безопасности работы крана.
Для уменьшения ошибок крановщика при считывании информации с дисплея или индикаторов, в частности информации о необходимости выполнения крановщиком каких-либо действий по управлению краном, отображение технологической информации и технологических инструкций осуществляется с применением графического дисплея и мультипликации, либо пиктографических знаков, дифференцированных по степени отклонения контролируемых параметров от штатных и отражающих оценку степени безопасности крана, что позволяет повысить наглядность представления информации и повысить удобство работы крановщика. В частности, сигнальная информация трех категорий - аварийная, предупреждающая и уведомляющая, отображается на экране дисплея различными цветами в зависимости от срочности необходимых действий крановщика в той или иной ситуации.
Для реализации этого подсистема взаимодействия с крановщиком 4 при помощи блока информационной поддержки крановщика 18 отображает на дисплее этого блока информацию из базы справочных данных 13. Причем для отображения этой информации в динамике дополнительно используются данные блока идентификации ситуации 6.
Выдача рекомендаций крановщику о наиболее рациональных действиях по управлению краном может осуществляться с учетом предварительно рассчитанной блоком 11 безопасной траектории перемещения груза краном. Для этого предварительно определяют (или вводят в ручном режиме) и записывают в базу данных моделей 9 (в вычислительное устройство) начальную и конечную точки перемещения стрелы или грузозахватного органа (груза) при выполнении грузоподъемной операции.
Предварительное определение координат этих точек может осуществляться путем установки стрелы без груза или грузозахватного органа крана в начальное и конечное положения и запоминания этих положений по командам крановщика, или при помощи бесконтактного, например лазерного, измерителя (угломера-дальномера) координат начального и конечного положения груза, работа которого поддерживается блоком идентификации ситуации 6.
Дополнительно в вычислительное устройство (в базу данных моделей 9) крановщиком в ручном режиме может вводиться значение веса понимаемого груза, либо значение этого веса может определяться на начальной стадии выполнения грузоподъемной операции при помощи датчика нагрузки крана, входящего в блок идентификации ситуации 6. Далее, с использованием координат начальной и конечной точек перемещения груза и значения веса груза, подлежащего подъему, блок прогнозирования поведения крана в штатном режиме 11 выявляет возможность безопасного перемещения этого груза, а блок синтеза наилучших решений по управлению краном 17 через блок информационной поддержки крановщика 18 предоставляет крановщику на индикаторе или дисплее соответствующие рекомендации по управлению краном.
При этом обеспечивается существенное повышение безопасности работы крана, поскольку исключаются попытки поднять и переместить груз, вес которого превышает грузоподъемность крана. Т.е. реализуется заблаговременное предупреждение крановщика о невозможности выполнения грузоподъемной операции с таким грузом, либо осуществляется блокировка (запрет) работы крана, без попыток подъема груза.
Из изложенного следует, что реализация предложенного способа поддержки крановщика обеспечивает существенное повышение безопасности работы крана при одновременном улучшении условий работы крановщика за счет оперативной выработки для крановщика рекомендаций по принятию решений по управлению краном и определения приоритетного для безопасности направления действий крановщика с учетом прогноза развития возможных штатных и аварийных ситуаций, обеспечения контроля за деятельностью крановщика по предупреждению опасного развития штатных и аварийных ситуаций и соответственно возможности своевременной реализации профилактических мер по снижению аварийности работы грузоподъемного крана, а также обеспечения защиты от ошибочных или умышленных действий крановщика, приводящих к аварии крана, в том числе путем автоматического перехода от ручного управления краном к автоматическому.
Источники информации
1. RU 2011632 С1, МПК5 В 66 С 23/90, 30.04.1994.
2. RU 2116240 С1, МПК6 В 66 С 23/90, 27.07.1998.
3. RU 2093452 С1, МПК6 В 66 С 13/18, 15/00, 23/88, 20.10.1997.
4. US 5730305 А, МПК6 В 66 С 13/16, 13/18, 24.03.1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ И РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2010 |
|
RU2442742C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СПОСОБ КОНТРОЛЯ И РЕГИСТРАЦИИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2269483C2 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
Изобретение относится к машиностроению. В способе поддержки крановщика по обеспечению безопасной работы грузоподъемного крана измеряют рабочие параметры крана, обрабатывают их и представляют на индикаторе информацию о необходимости выполнения крановщиком действий по устранению возникшей аварийной ситуации. Дополнительно создают базу данных о сочетании рабочих параметров крана для различных значений его нагрузок и пространственных положений стрелы или грузозахватного органа, создающих потенциальную опасность в его работе, и сохраняют ее на кране. При помощи вычислительного устройства с использованием этой базы данных и при необходимости математической модели крана осуществляют прогноз возникновения аварийной ситуации и дополнительное представление на индикаторе информации о действиях крановщика, необходимых для предотвращения угрозы возникновения аварийной ситуации. Изобретение позволяет повысить безопасность работы крана при одновременном улучшении условий работы крановщика. 21 з.п. ф-лы, 1 ил.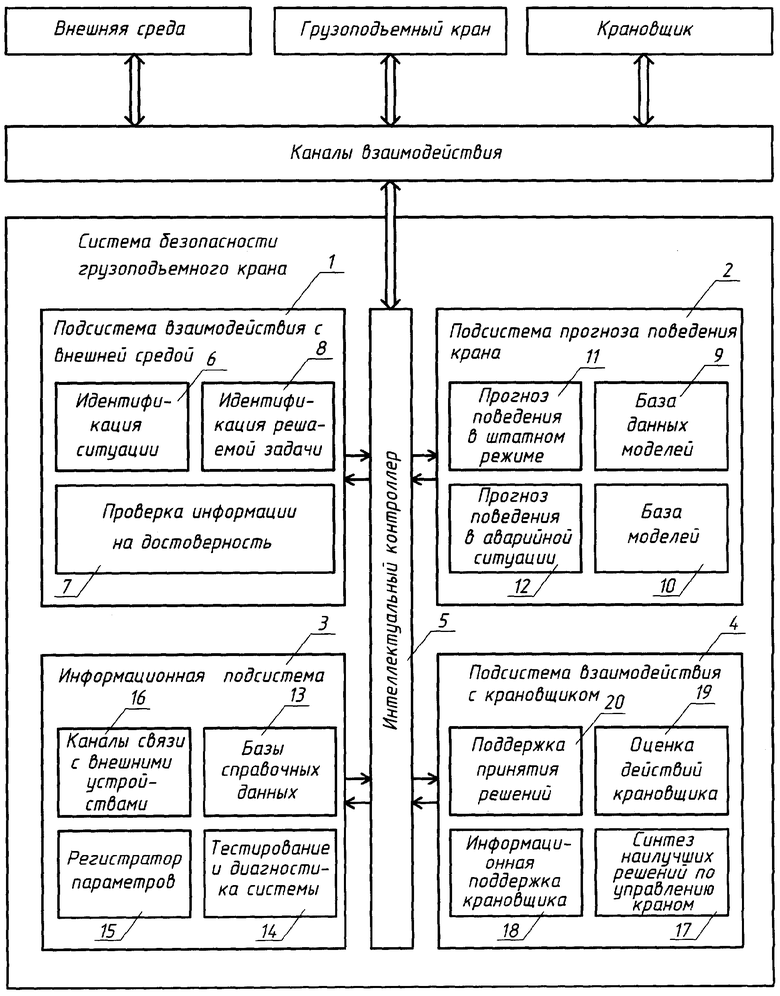
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТАМИ ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОМ РЕЖИМЕ | 1997 |
|
RU2102258C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| Устройство для управления грузоподъемным механизмом | 1972 |
|
SU548530A1 |

