Изобретение относится к грузоподъемным кранам стрелового типа и может быть использовано в стационарных и передвижных, сухопутных, а также плавучих кранах.
Известен способ уравновешивания грузоподъемного крана, заключающийся в перемещении противовеса в зависимости от величины нагрузки (реализуемый устройствами и изложенный в описаниях изобретений В 66 С 23/76, а.с. №178073 и В 66 С 23/76, а.с. №1622284).
Недостатком данного способа является малая эффективность повышения грузового момента, т.к. перемещается только часть массы поворотных частей устройства, т.е. противовес, что вызывает незначительное изменение грузового момента.
Известны стреловые краны (см. «Грузоподъемные машины», под редакцией М.П.Александрова, Москва, «Высшая школа», 1972 г., стр.21-28), содержащие основание, на котором установлено опорно-поворотное устройство с установленными на нем платформой с грузовой стрелой, приводом подъема груза, приводом изменения вылета стрелы и противовесом.
Масса противовеса составляет значительную часть массы самого крана. Массу противовеса обычно выбирают из расчета, чтобы его момент полностью уравновешивал момент от собственного веса крана и половину его грузового момента (см. «Подъемно-транспортные машины» А.О.Спиваковский и Н.Ф.Руденко, Государственное научно-техническое издательство машиностроительной литературы, Москва, 1949 г., стр.408, второй абзац снизу).
Недостатком известных устройств является большая металлоемкость и энергоемкость, обусловленные наличием балластной массы противовеса и большой массой механизмов, которая вызвана повышенными нагрузками из-за наличия противовеса.
Известен способ уравновешивания грузоподъемного крана, в особенности под нагрузкой (7 В 66 С 23/90, FR 2799747 А1, ИСМ, вып.36, №4 за 2002 г., стр.12), заключающийся в перемещении противовеса в зависимости от нагруженного состояния крана.
Недостатком данного способа является малая эффективность повышения грузового момента, т.к. для уравновешивания используется только часть массы поворотных частей устройства, т.е. противовес, что вызывает незначительное изменение грузового момента.
Известно подъемно-транспортное устройство (В 66 С 23/76, №1477663), содержащее самоходное основание с поворотной платформой, на которой смонтированы стрела с грузовой подвеской и подъемный механизм с гибкой тягой, а также противовес, подвижный вдоль платформы по направляющим.
Наличие отдельного противовеса обуславливает большую металлоемкость и энергоемкость, дополнительные нагрузки на механизм поворота, на ходовую часть и механизм перемещения крана, а также сильное воздействие на окружающую среду, выражающееся повышенным давлением на грунт.
Изобретение позволяет более эффективно увеличить грузовой момент крана за счет перемещения в качестве противовеса большей, в процентном отношении, массы поворотных частей, снизить металлоемкость и энергоемкость путем исключения балластных масс и затрат энергии на их перемещение, а также уменьшить воздействие на окружающую среду.
Для этого при изменении грузового момента, т.е. при подъеме груза или изменении вылета, после определения соотношения грузового и восстанавливающего моментов в качестве подвижного противовеса для уравновешивания крана перемещают в соответствующем направлении функциональное оборудование (механизмы и элементы конструкции, предназначенные непосредственно для подъема, поддержания и перемещения груза - силовая установка, редукторы, механизмы подъема стрелы и груза и т.п.) или часть его и металлоконструкцию платформы со стрелой.
Для сохранения вылета крюка во время смещения платформы соответственно смещают конец стрелы (или грузовую тележку) на величину смещения платформы, но в противоположную смещению платформы сторону.
Для сохранения положения крюка по высоте во время смещения платформы при изменении положения стрелы или ее конфигурации включают привод изменения высоты крюка, причем изменение положения крюка направлено в сторону, противоположную вертикальному перемещению оголовка стрелы, и равно ему по величине.
Для осуществления данного способа на верхней части опорно-поворотного устройства выполнены направляющие, на которых с возможностью перемещения от привода установлена платформа с функциональным оборудованием и стрелой.
Сущность изобретения поясняется чертежами, где
на фиг.1 изображен стреловой грузоподъемный кран, реализующий заявляемый способ уравновешивания;
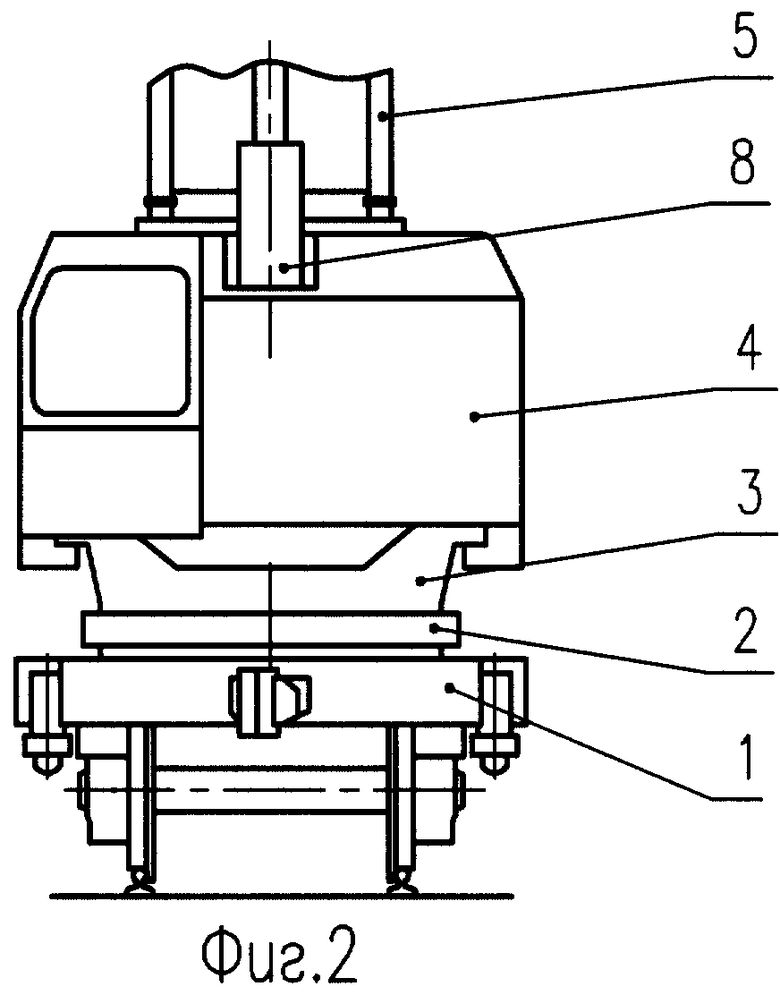
на фиг.2 - вид А на фиг.1;
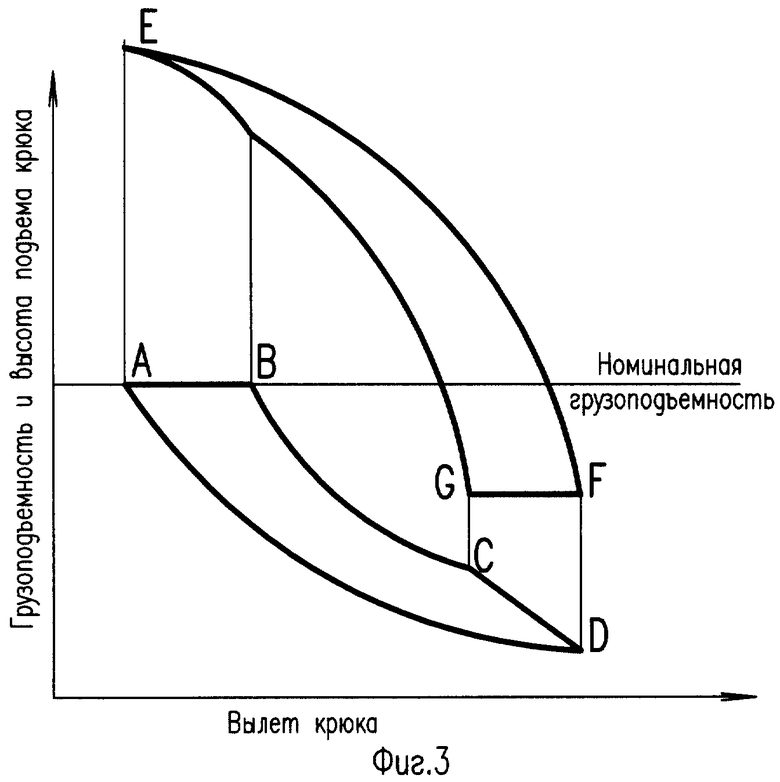
на фиг.3 показаны графики изменения грузоподъемности и высоты положения крюка заявляемого крана в зависимости от вылета.
Заявляемый способ содержит операции изменения грузового момента (подъем груза или изменение вылета стрелы), определения соотношения грузового и восстанавливающего моментов, изменения величины восстанавливающего момента путем перемещения противовеса для поддержания заданного соотношения грузового и восстанавливающего моментов, причем в качестве противовеса используют массу поворотной платформы с расположенным на ней функциональным оборудованием.
Заявляемый способ может содержать операцию компенсации изменений вылета крюка при уравновешивании, заключающуюся в горизонтальном смещении конца стрелы (или грузовой тележки) относительно платформы на величину смещения платформы, но в противоположную смещению платформы сторону.
Заявляемый способ может содержать операцию компенсации изменений положения крюка по высоте при изменении положения стрелы, заключающуюся в изменении положения (высоты) крюка относительно стрелы, причем изменение положения крюка направлено в сторону, противоположную вертикальному перемещению оголовка стрелы, и равно ему по величине.
Грузоподъемный кран, реализующий заявляемый способ (см. фиг.1), содержит основание 1, на котором установлено опорно-поворотное устройство 2, представляющее собой подшипник, нижняя обойма которого неподвижно закреплена на основании, а на верхней поворотной обойме которого выполнены направляющие 3, на которых с возможностью перемещения установлена платформа 4 с грузовой стрелой 5 и крюком 6, приводом 7 подъема груза, приводом 8 изменения вылета стрелы. Стрела может быть, например, прямой, с меняющейся геометрией (сочлененной, телескопической) или горизонтальной с грузовой тележкой. Платформа 4 снабжена приводом 9 (условно не показан) для перемещения по направляющим 3. Центр тяжести платформы 4 расположен в точке ЦТ. Основание может быть, например стационарным, плавучим, передвижным или самоходным, выполненным в виде рамы на колесном, гусеничном или ином ходу.
В исходном положении (см. фиг.1) расстояние "а" от центра тяжести ЦТ платформы 4 до оси 10 опорно-поворотного устройства 2 обеспечивает минимальный восстанавливающий момент (на фиг.1, минимально), крюк 6 крана расположен над грузом, при этом стрела находится в положении I и вылет стрелы соответствует величине "С".
Осуществляют заявляемый способ следующим образом. Включают привод 7 механизма подъема груза или привод 8 изменения вылета стрелы в сторону увеличения (если груз уже висит на крюке). По мере натяжения каната или увеличения вылета "С", грузовой момент возрастает и устойчивость, т.е. соотношение грузового и восстанавливающего моментов, изменяется.
Мгр=Р×С,
где Р - сила тяжести груза;
С - вылет стрелы (расстояние от ребра опрокидывания до точки подвеса груза).
Мвост=Мосн+Q×(а+b) - восстанавливающий момент, где
Мосн - восстанавливающий момент основания от действия его массы, вытесненной им жидкости или реакции иной опоры на окружающую среду;
Q - сила тяжести массы функционального оборудования, механизмов и металлоконструкций подвижной платформы;
а - расстояние от центра тяжести массы функционального оборудования, механизмов и металлоконструкций платформы до оси опорно-поворотного устройства;
b - расстояние от оси опорно-поворотного устройства до ребра опрокидывания.
Как только соотношение Мгр/Мвост<=1 или Мгр-Мвост<=0 достигнет верхнего заданного предела, обеспечивающего достаточную устойчивость, включают привод 9 перемещения платформы 4 в сторону увеличения восстанавливающего момента (на фиг.1 - влево). Платформа смещается, центр тяжести занимает положение ЦТ', расстояние "а" увеличивается до «а'», что приводит к увеличению восстанавливающего момента Мвост. Стрела смещается в положение II, при этом вылет стрелы "С" уменьшается, что приводит к уменьшению грузового момента Мгр. Оба эти фактора ведут к уменьшению соотношения Мгр и Мвост. При достижении соотношением нижнего заданного значения, выключают привод 9 перемещения платформы 4.
При опускании груза по мере уменьшения натяжения каната во время касания грузом опоры или при уменьшении вылета стрелы (если груз уже висит на крюке), уменьшается грузовой момент. Это приводит к тому, что соотношение грузового и восстанавливающего моментов достигает значения ниже нижнего заданного. В этот момент включают привод 9 перемещения платформы 4 в сторону уменьшения восстанавливающего момента (на фиг.1 - вправо). Расстояние "а'" уменьшается, что приводит к уменьшению восстанавливающего момента. Стрела вместе с платформой смещаются (на фиг.1 - вправо), вылет "С" увеличивается, что приводит к увеличению грузового момента. Оба эти фактора ведут к увеличению соотношения моментов. При достижении верхнего значения заданного соотношения грузового и восстанавливающего моментов или при достижении платформой 4 крайнего переднего положения, привод 9 выключают.
Таким образом, значение соотношения грузового и восстанавливающего моментов, при смещении платформы, поддерживается в заданных пределах и производится уравновешивание крана при изменении вылета стрелы или грузового момента.
Для компенсации изменения положения точки подвеса груза во время выполнения уравновешивания при увеличении грузового момента, когда платформа смещается (на фиг.1 - влево, в положение II) на величину Δа=а'-а, производят перемещение точки подвески крюка на величину смещения Δа платформы, но в противоположную смещению платформы сторону (на фиг.1 - вправо), например, путем перемещения грузовой тележки, изменением наклона прямой стрелы (из положения II в положение III) или изменением конфигурации сочлененной или телескопической стрелы, что влечет за собой сохранение вылета С и положения груза в горизонтальной плоскости.
При уменьшении грузового момента, когда платформа и стрела смещаются (на фиг.1 - вправо из положения III в положение IV) производят перемещение (на фиг.1 - влево) точки подвески крюка путем перемещения грузовой тележки, изменением наклона прямой стрелы (в положение I) или изменением конфигурации сочлененной или телескопической стрелы на величину смещения платформы, что влечет за собой сохранение вылета С и положения груза в горизонтальной плоскости. Таким образом при выполнении уравновешивания происходит сохранение вылета С.
Во время выполнения уравновешивания при увеличении грузового момента, когда платформа смещается (на фиг.1 - влево) и производят увеличение вылета, например наклоном прямой стрелы (из положения II в положение III), происходит опускание оголовка стрелы и соответственно крюка на величину Δh. Для компенсации изменения положения крюка по высоте включают привод перемещения крюка и производят его подъем на величину Δh.
Во время выполнения уравновешивания при уменьшении грузового момента, когда платформа смещается (на фиг.1 - вправо) и производят уменьшение вылета, например подъемом прямой стрелы (из положения IV в положение I), происходит подъем оголовка стрелы и соответственно крюка на величину Δh. Для компенсации изменения положения крюка по высоте включают привод перемещения крюка и производят его опускание на величину Δh.
Таким образом во время уравновешивания крана при изменении грузового момента крюк и подвешенный на нем груз остаются в неизменном положении.
На фиг.3 изображен график максимальной высоты крюка и грузоподъемности заявляемого крана при соответствующем вылете. Участки АВ и СД соответствуют грузоподъемности крана при неполном смещении платформы 4. Участок ВС соответствует грузоподъемности крана при наибольшем смещении платформы. Участок АД соответствует грузоподъемности крана без смещения платформы. Участок EF соответствует максимальной высоте крюка при различном вылете без смещения платформы. Участок EG соответствует максимальной высоте крюка при различном вылете и при наибольшем смещении платформы. Участок GF соответствует минимальной высоте крюка при неполном смещении платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2593179C2 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ СТРЕЛОВЫХ КРАНОВ | 1973 |
|
SU385889A1 |
| Самоходный стреловой кран | 1979 |
|
SU814842A1 |
| Устройство для уравновешивания стрелковых кранов | 1972 |
|
SU449004A2 |
| ПОДВИЖНЫЙ ПРОТИВОВЕС ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2268234C1 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| Стреловой самоходный кран | 1985 |
|
SU1344726A1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Стреловой кран | 1979 |
|
SU908742A1 |
Изобретение относится к грузоподъемным поворотным стреловым кранам. Способ уравновешивания грузоподъемного стрелового крана заключается в перемещении уравновешивающей массы. В качестве подвижной уравновешивающей массы используют массу функционального оборудования и металлоконструкции поворотной части крана. Грузоподъемный кран для осуществления способа содержит основание, опорно-поворотное устройство, на котором установлена поворотная платформа с расположенным на ней функциональным оборудованием и стрелой, и направляющие. Направляющие выполнены на поворотной части опорно-поворотного устройства, и на них установлена с возможностью перемещения от привода платформа с установленным на ней функциональным оборудованием и стрелой. Технический результат - увеличение грузового момента крана, снижение металлоемкости и энергоемкости, а также уменьшение воздействия на окружающую среду. 2 н. и 2 з.п. ф-лы, 3 ил.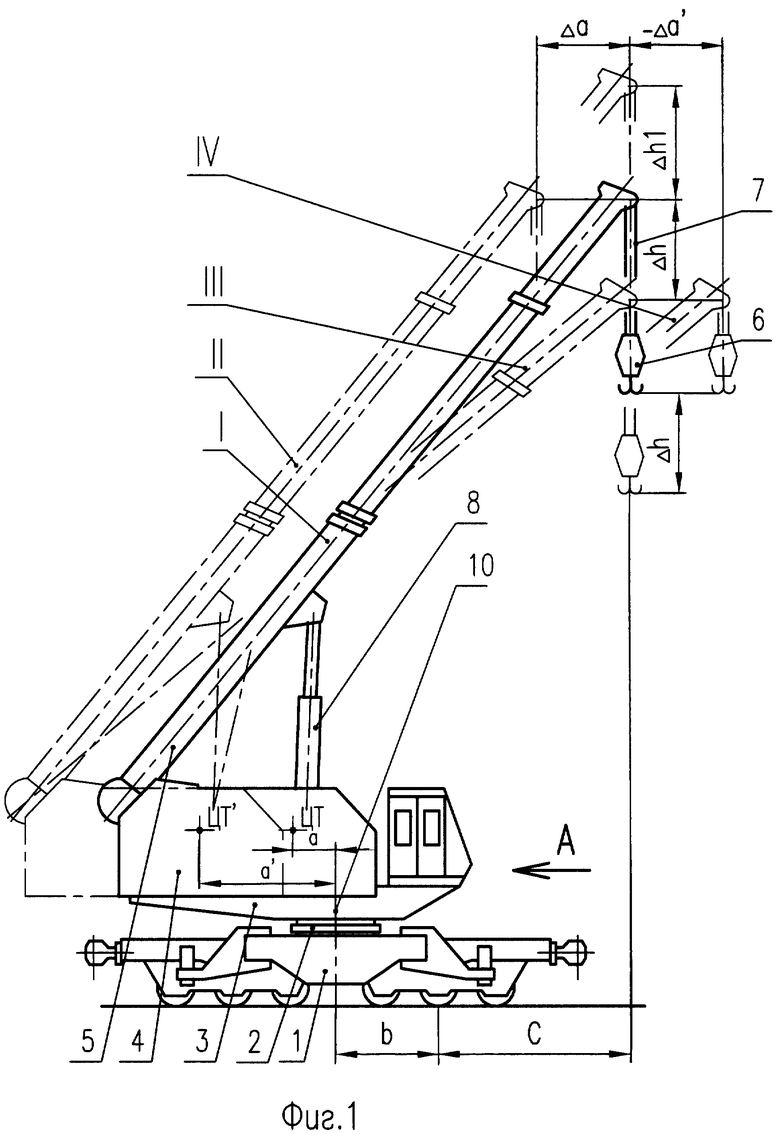
| Подъемно-транспортное устройство | 1987 |
|
SU1477663A1 |
| Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО | 2022 |
|
RU2799747C1 |
| Стреловой самоходный кран | 1983 |
|
SU1232636A1 |
| DE 4409514 A1, 13.04.1995. | |||

