1
Изобретение относится к подъемно- транспортному машиностроению, а именно к самоходным стреловым, преимущественно железнодорожным кранам, предназначенным для строительно-монтажных и погрузочно-разгрузочных работ с тяжелыми грузами.
Цель изобретения - расширение эксплуатационных возможностей.
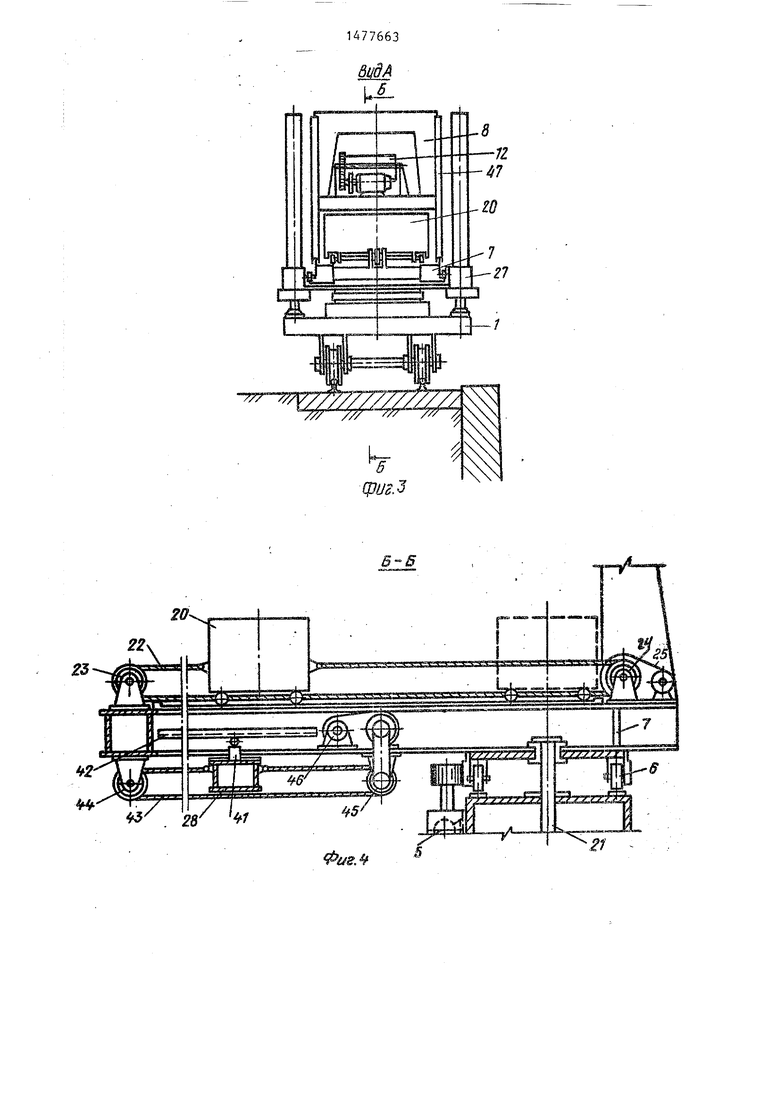
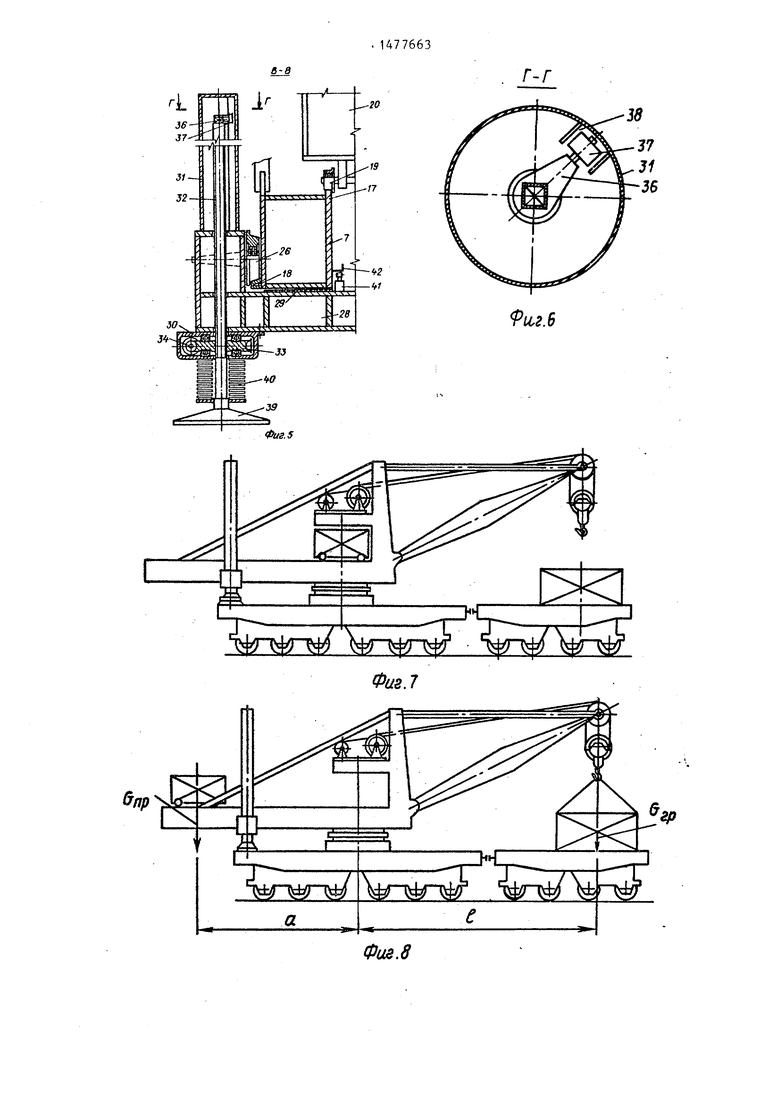
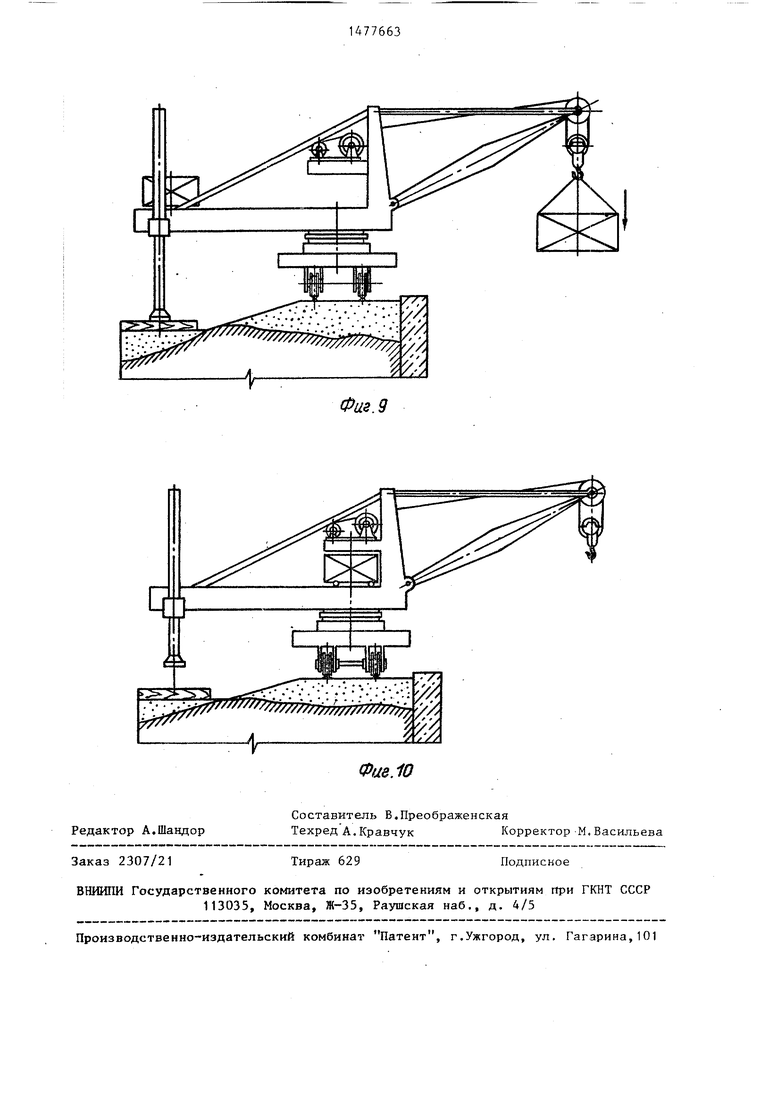
На фиг. 1 изображено подъемно- транспортное устройство, общий вид, в исходном транспортном положении; на фиг. 2 - то же, в промежуточном рабочем положении, на фиг. 3 - вид А на фиг. Г, на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 2 на фиг. 6 - разрез Г-Г на фиг. 5; на фиг. 7-10 - схематическое изображение устройства в различных рабочих положениях.
Подъемно-транспортное устройство содержит самоходное основание 1, установленное на рельсовом пути 2 посредством тележек 3 и несущее поворотную платформу 4 с приводом 5 ее поворота и катками 6, На раме 7 поворотной платформы 4 установлена стойка 8, на которой смонтирована посредством тяг 9 стрела 10 с блоками 11 на конце. В верхней части стойки 8 установлен подъемный механизм 12с гибкой тягой 13, запасованной в полиспаст 14 через блоки 11 стрелы 10 и блоки 15 грузовой подвески 16. На раме 7 поворотной платформы 4 выполнены горизонтальные направляющие 17 и параллельные им дополнительные направляющие 18. На направляющих 17 установлен подвижно посредством колес 19 противовес 20, причем стойка 8 смещена относительно оси 21 поворота платформы 4 в направлении стрелы 10 на величину, допускающую установку центра тяжести противовеса 20 на указанную ось поворота. Противовес 20 выполнен с возможностью размещения под подъемным механизмом 12,
(Л
Я 1 1
с& оъ
00
что обеспечивает максимальную ком- яактность устройства.
Механизм перемещения противовеса 20 содержит бесконечную цепь 22 (параллельную вертикальной плоскости симметрии стрелы 10), концы которой шарнирно соединены с противоположными гранями противовеса 0. Цепь 22 огибает обводную звездочку 23 и при водную звездочку 24, связанную с приводом 25. Звездочки 23 и 24 размещены по обе стороны от противовеса 20 и смонтированы на верхней плоскости рамы 7. На направляющих 18 подвешена посредством колес 26 опора 27 противовеса 20, включающая балку 28 размещенную с зазорами между поворотной платформой 4 и самоходным основанием 1 и оснащенную прокладками 29, закрепленными на верхней плоскости балки 28 с возможностью контактирования с рамой 7 поворотной платформы 4. По краям балки 28 по обе стороны рамы 7, а следовательно, по обе стороны противовеса 20 установлены аутригеры 30, каждый из которых выполнен, например, в виде винтового доамкрата, содержащего установленные в корпусе
31ходовой винт 32 с гайкой 33, выполненной в виде червячного колеса, находящегося в зацеплении с червяком 34, связанным с двигателем 35. Винт
32зафиксирован от проворота при помощи рычага 36 с роликом 37 на конце. Ролик 37 размещен в пазу 38 корпуса 31. Паз 38 параллелен оси винта 32, а рычаг 36 закреплен на верхнем конце винта. На нижнем ко нце винта 32 закреплена пята 39. Винт 32 оснащен защитным гофрированным кожухом АО.
Аутригеры 30 выполнены с возмож ностью размещения пяты 39 с зазором относительно плоскости самоходного основания 1 в собранном (сложенном) положении аутригеров, что обеспечивает возможность опирания пяты 39 на самоходное основание 1 в случае необходимости (например, когда опи- рание на железнодорожное полотно исключено) . На балке 28 установлен конечный выключатель 41, взаимодействующий с горизонтальным упором 42, закрепленным на раме 7, и предназначенный для отключения двигателя 35 в момент соприкосновения балки 28 с рамой 7, что предотвращает воздейна поворотную
0
0
5
0
ствие аутригеров 30 платформу 4.
Механизм перемещения опоры 27 противовеса 20 содержит бесконечную цепь 43, размещенную параллельно плоскости симметрии стрелы 10 и шарнирно соединенную своими концами с противоположными гранями балки 28. Цепь 43 огибает обводную звездочку 44 и приводную звездочку 45, связанную с приводом 46. Звездочки 44 и &5 размещены по обе стороны от балки 28 и смонтированы на нижней плоскости рамы 7. Для увеличения жесткости металлоконструкции поворотной платформы 4 при большой длине рамы 7 онз оснащена стяжками 47, соединяющими конец рамы 7 с вершиной стойки 8 и размещенными в вертикальных плоскостях, параллельных направляющим 18 и 17, с зазорами относительно аутригеров 30 и противовеса 20. Поворотная платформа 4 с закрепленными на ней узлами сбалансирована в исходном положении относительно своей оси поворота. На боковых гранях рамы 7 закреплены линейки 48 со шкалой 49,, отградуированной из условия сбалансированности поворотной части устройства:
Ч
5
0
5
0
5
-I
Gnt xa,
где Grp -- вес груза,
расстояние от оси поворота платформы 4 до линии подвеса груз а , Gnp- вес противовеса , а - расстояние от оси поворота платформы 4 до центра тяжести противовеса 20. На противовесе 20 закреплена стрелка- указатель 50. Устройство оснащено дополнительным подвижным основанием
51под груз 52. Основание 51 размещено с зазором относительно самоходного основания 1, связано с ним посредством сцепа 53 и предназначено для уменьшения нагрузки на рельсовый путь при транспортировке груза, что обеспечивает возможность использования подъемно-транспортного устройства на эстакадах с низкой несущей способностью.
Устройство работает следующим образом,
В исходном положении (фиг. 7) груз
52находится на дополнительном подвижном основании 51. Поворотная платформа 4 с рамой 7 и стрелой 10 занимает продольное относительно рельсового пути 2 положение. Противовес 20 размещен по оси 21 поворота платформы 4. Аутригеры 30 опираются посредством пят 39 на плоскость основания 1 либо опора 27 противовеса 20 опирается на направляющие 18 посредством колес 26, тогда между пятами 39 и плоскостью основания 1 образован зазор. В указанном исходном положении поворотная платформа 4 (с учетом размещенных на ней узлов) сбалансирована относительно своей оси поворота. В этом положении подъемно- транспортное устройство передвигается к месту разгрузки груза 52.
По достижении указанного места (фиг. 8) винты 32 при помощи двигателя 35 выдвигаются до опирания пят 39 на самоходное основание 1, а затем дальнейшим вращением гайки 33 балка 28 перемещается вверх до соприкосновения прокладок 29 с нижней плоскостью рамы 7, при этом конечный выключатель 41 приходит во взаимодействие с упором 42 и отключает двигатель 35. Затем противовес 20 посредством привода 25 цепного механизма перемещается в положение, соответствующее весу поднимаемого груза. Противовес 20 устанавливается в требуемое (из условия сбалансированности поворотной части устройства) положение визуально по шкале линейки 48. Затем подвеска 16 соединяется с грузом 52, который поднимается при помощи механизма 12 над основанием 51. С помощью двигателя 35 балка 28 опускается до опирания колес 26 на направляющие 18 рамы 7, после чего винты 32 приподнимаются, образуя зазор между пятами 39 и верхней плоскостью основания 1 (при этом благодаря определенному положению противовеса 20 поворотная часть подъемно-транспортного устройства сбалансирована относительно оси поворота) .
После этого при помощи привода 5 платформа 4 разворачивается на требуемый угол, в данном случае на 90° (фиг. 9), затем опора 27 противовеса 20 передвигается посредством привода 4G цепного механизма в направлении торца рамы 7 и останавливается в требуемом, по условиям рельефа
местности, прилегающей к железнодорожному полотну, месте. Винты 32 аутригеров 30 выдвигаются до упора пят 39 в землю, после чего балка 28 поднимается до соприкосновения с рамой 7 поворотной платформы 4. В этом положении устройство готово к разгруз- ке. Механизмом 12 груз 52 опускается в заданное положение. После ослабления гибкой тяги 13 нагрузка от противовеса 20 воспринимается опорой 27 и не передается на платформу 4, а следовательно, и на тележки 3 само5 ходного основания 1. После отсоединения грузовой подвески 16 от груза . 52 она поднимается механизмом 12 в транспортное положение, затем противовес 20 передвигается к оси 21 поо ворота платформы 4 до совмещения с указанной осью его центра тяжести, после чего винты 32 аутригеров 30 поднимаются в крайнее верхнее положение (фиг. 10) и передвигаются в ис5 ходное транспортное положение. Платформа 4 разворачивается в обратную сторону на 90е и подъемно-транспортное устройство занимает исходное положение,
0
Формула изобретения
Подъемно-транспортное устройство, содержащее самоходное основание с поворотной платформой, на которой смонтированы стрела с грузовой подвеской и подъемный механизм с гибкой тягой, а также противовес, подвижный вдоль платформы по направляющим с возможностью установки его центра
5
0
5
0
тяжести на ось ее поворота, и опора, размещенная на поворотной платформе позади стрелы, отличающее- с я тем, что, с целью расширения эксплуатационных возможностей, оно снабжено дополнительными направляющими, параллельными основным, смонтированными на поворотной платформе, а опора выполнена в виде балки с аутригерами на концах, размещенными по обе стороны противовеса, подвешенной подвижно на дополнительных направляющих над самоходным основанием.
Cft
«Ni
r
О
% ЗЯф
MI № /&
QZ
9-9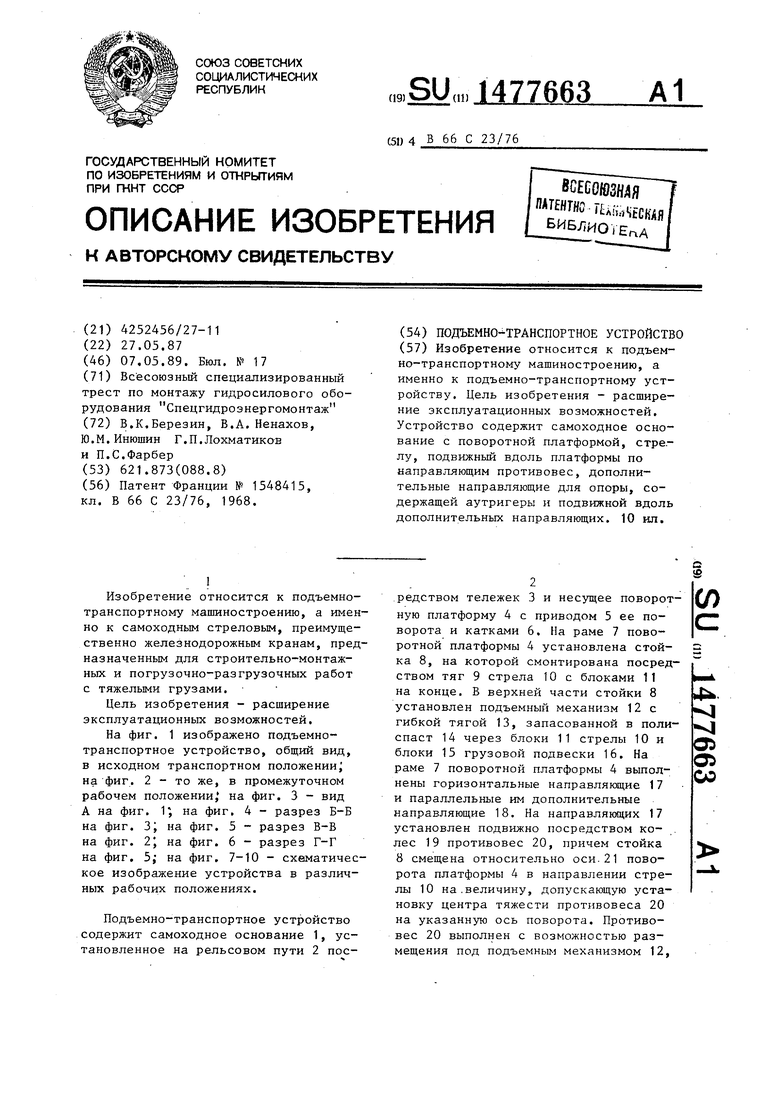
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| ПЕРЕДВИЖНОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2002 |
|
RU2238236C2 |
| ПОДЪЕМНЫЙ КРАН С ПЕРЕМЕЩАЕМЫМ ПРОТИВОВЕСОМ | 2010 |
|
RU2556678C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ГРУЗОВАЯ КОЛЕСНАЯ МАШИНА | 2007 |
|
RU2347692C1 |
| Самоходный грузоподъемный кран | 1990 |
|
SU1776630A1 |
| Самоходный грузоподъемный кран | 1986 |
|
SU1370057A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |

Изобретение относится к подъемно-транспортному машиностроению, а именно к подъемно-транспортному устройству. Цель изобретения - расширение эксплуатационных возможностей. Устройство содержит самоходное основание с поворотной платформой, стрелу, подвижный вдоль платформы по направляющим противовес, дополнительные направляющие для опоры, содержащей аутригеры и подвижной вдоль дополнительных направляющих. 2 з.п. ф-лы, 10 ил.
Ј 2Г1&
С99лш
б-в
-L
Фиг.5
&пр
Г-Г
20
38
$}ш. 6
Фиг.7
Фиг.8
Фиг. 9
Редактор А.Шандор
Составитель В.Преображенская
Техред А.КравчукКорректор М.Васильева
Заказ 2307/21
Тираж 629
ВНИИПИ Государственного комитета по изобретениям и открытиям rtpn ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Фае.10
Подписное
| Гелеобразующая композиция для обработки нефтяных скважин | 1988 |
|
SU1548415A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
