Изобретение относится к нанотехнологии, а более конкретно к устройствам перемещения по трем координатам. Например, устройство перемещения может быть использовано в качестве сканера в зондовой микроскопии.
Известно устройство перемещения (пьезосканер) по трем координатам, состоящее из основания с закрепленным на нем одним концом блоком перемещения по одной координате (Z), на другом конце которого посредством соединительного элемента закреплен блок перемещения по двум взаимно перпендикулярным координатам (X, Y) в плоскости, перпендикулярной координате Z, с держателем объекта на свободном конце [1].
Недостаток данного устройства заключается в том, что конструкция с последовательно расположенными блоками перемещения по координате Z и по координатам X, Y образует протяженный рычаг с закрепленным одним и свободным другим концами. При случайном неконтролируемом воздействии на свободный конец такого рычага могут происходить поломки пьезосканера, особенно при воздействиях в направлениях, перпендикулярных его оси. Учитывая хрупкость пьезокерамических элементов, используемых в пьезосканерах, такие поломки становятся практически неизбежными.
Известно также устройство перемещения, в котором дополнительно введены направляющие по координате Z, сопряженные с основанием и с соединительным элементом по его краям [2]. В этом устройстве длина рычага, образуемого конструкцией, уменьшена и равна длине блока перемещения по координатам (X, Y), что увеличивает прочность конструкции, однако не гарантирует ее защищенность от поломок. В этом устройстве случайные воздействия также могут вызывать деформации и отклонения по осям Z, Х или Y, превышающие предел прочности, и приводить к разрушению пьезосканера.
Технический результат изобретения заключается в уменьшении возможности поломок устройства, повышении его надежности, а также в возможности повышения скорости перемещений и придании устройству перемещения метрологических качеств.
Указанный результат достигается тем, что в устройстве перемещения, состоящем из основания с закрепленным на нем одним концом совмещенным узлом блока перемещения по одной координате (Z) и блока перемещений по двум взаимно перпендикулярным координатам (X, Y), другим свободным концом совмещенного узла вместе с расположенным на нем держателем объекта на упомянутом основании введены упоры, размещенные через зазоры напротив упомянутых свободного конца совмещенного узла и держателя объекта, а величины зазоров превышают величины функциональных перемещений конца совмещенного узла и держателя объекта в направлении соответствующих упоров, но меньше, чем предельно допустимые по прочности совмещенного узла отклонения в тех же направлениях.
Одним из вариантов осуществления изобретения является расположение упоров по осям (Z, X, Y) перемещений. Предпочтительным является попарное расположение упоров, по два упора на каждом направлении напротив друг друга. Возможен вариант, в котором каждому упору на основании соответствует упорная площадка на свободном конце совмещенного узла или держателе объекта. Возможен также вариант, в котором упор и упорная площадка в своих основаниях выполнены из диэлектрического материала и заканчиваются плоскопараллельными электродами, являющимися обкладками конденсатора емкостного датчика перемещений устройства. Существует вариант, в котором для придания демпфирующих свойств упомянутый зазор заполнен вязкой жидкостью.
На фиг.1 изображено устройство перемещения с упорами в общем виде.
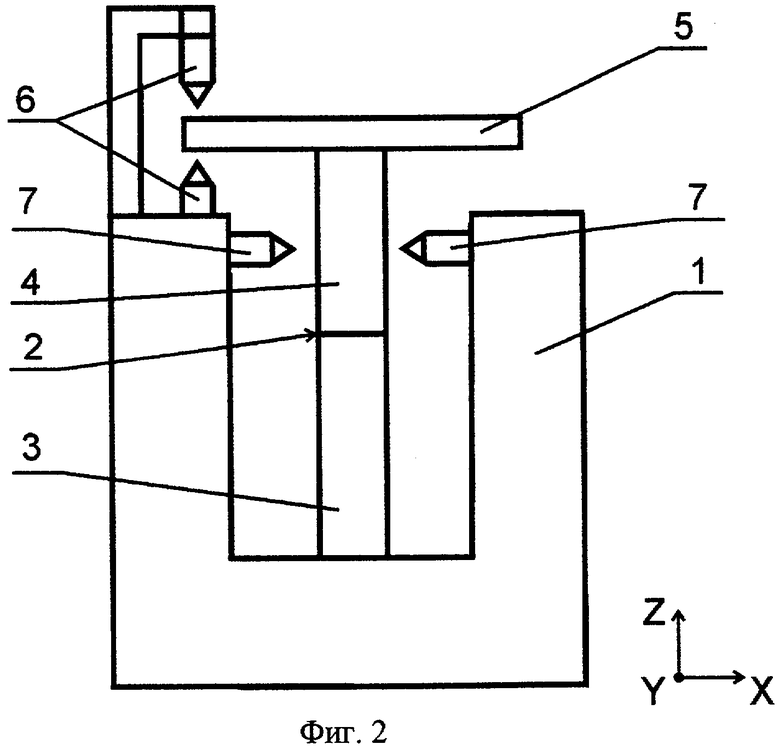
На фиг.2 - вариант попарного расположения упоров по осям координат.
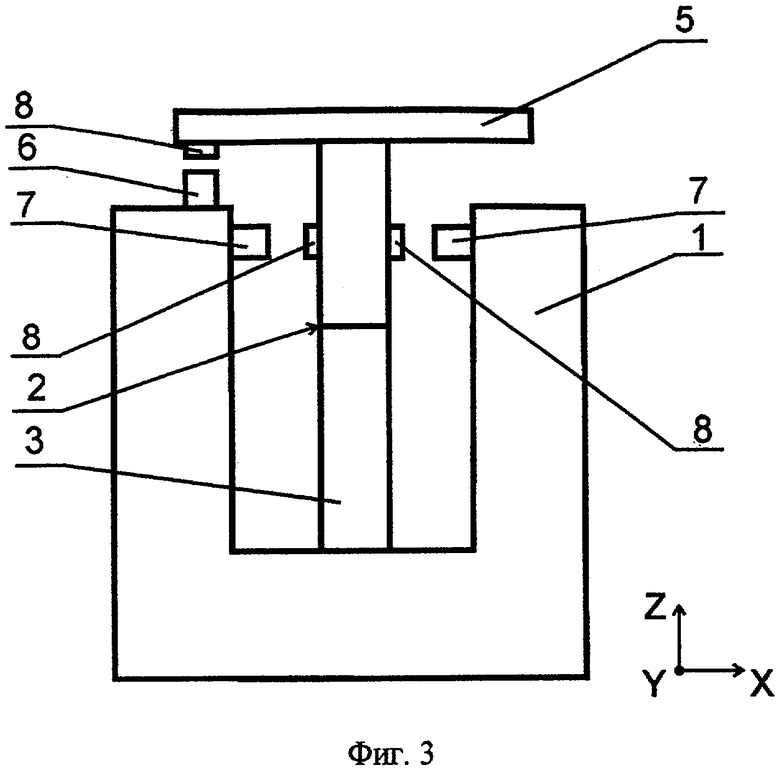
На фиг.3 - вариант выполнения устройства с упорами и упорными площадками.
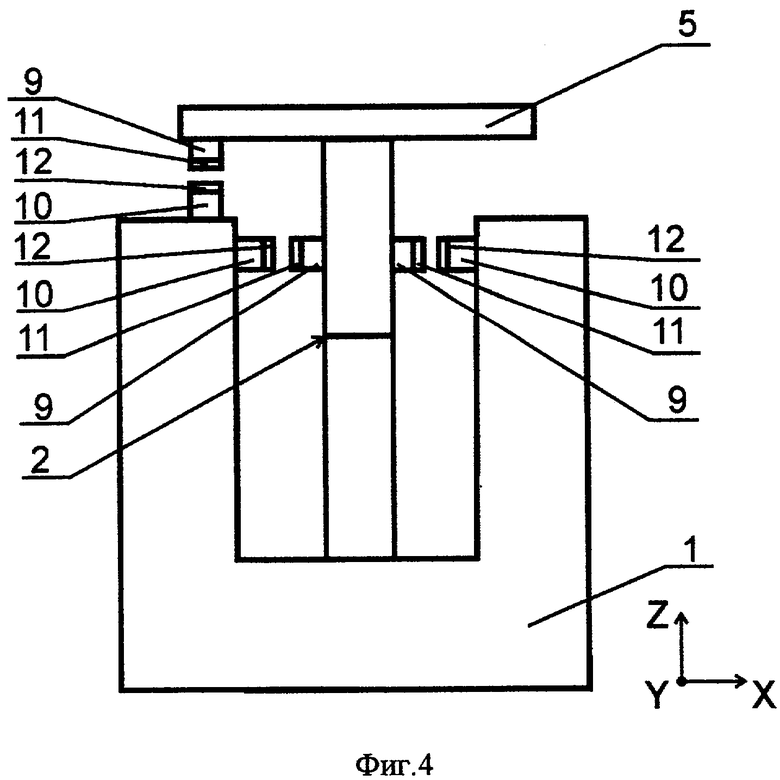
На фиг.4 - вариант выполнения упоров и упорных площадок в виде составных частей емкостного датчика перемещений.
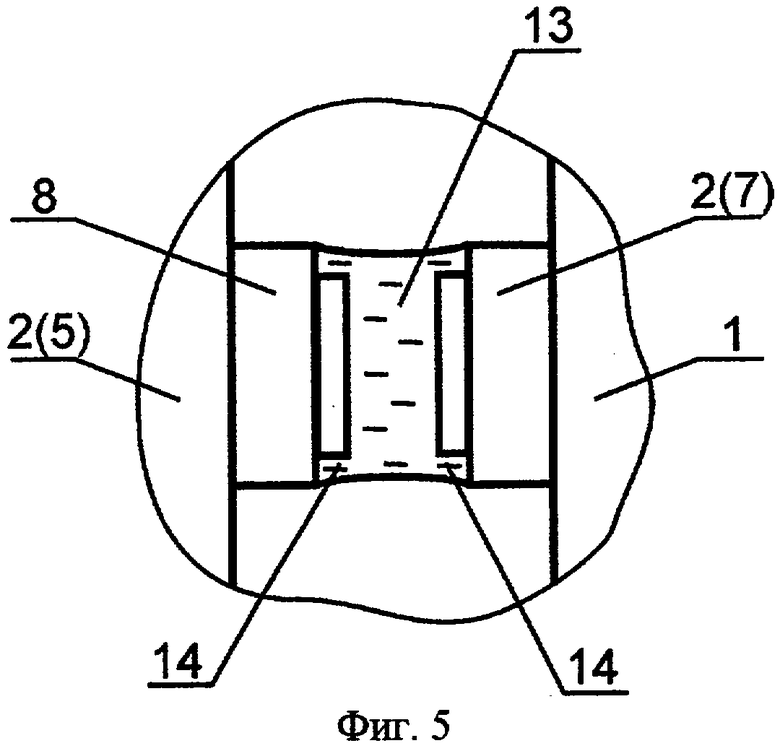
На фиг.5 - вариант выполнения упоров и упорных площадок с заполнением зазора вязкой жидкостью.
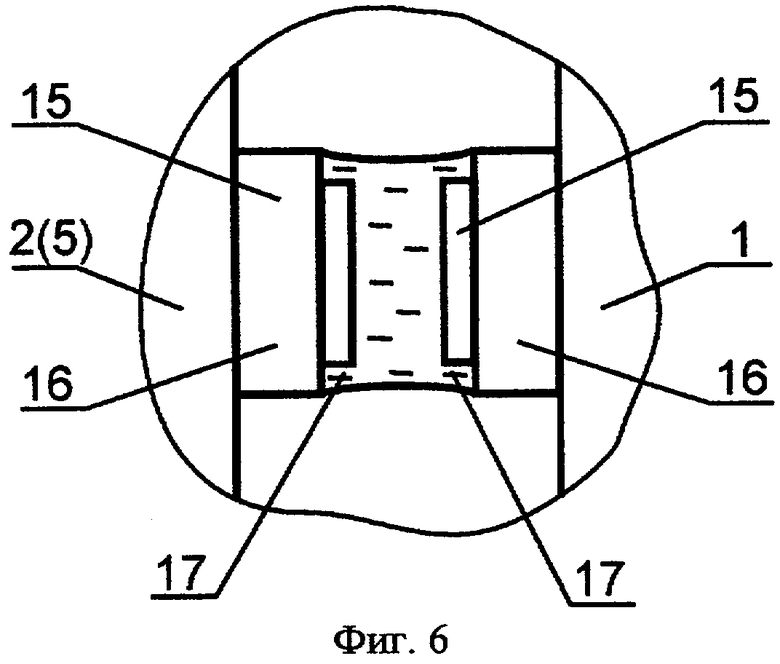
На фиг.6 - комбинированный вариант исполнения упоров и упорных площадок.
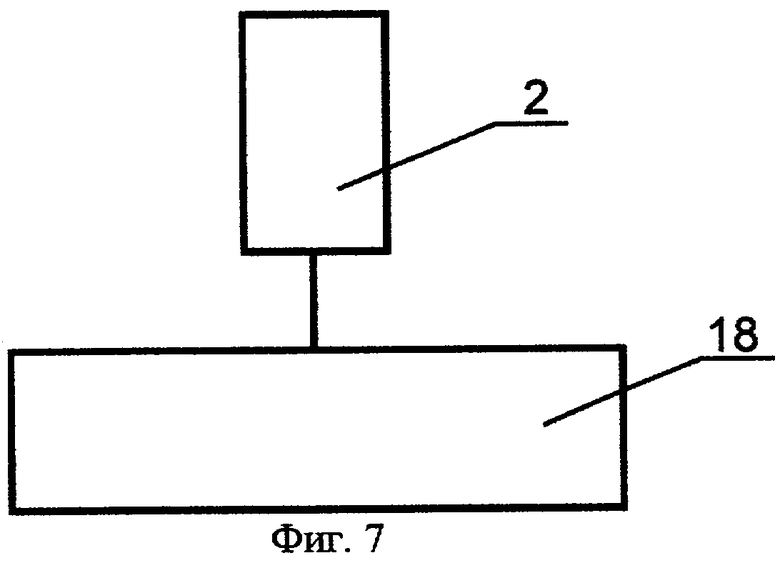
На фиг.7 представлена блок-схема устройства перемещения.
Устройство перемещения содержит основание 1 с закрепленным на нем одним концом совмещенным узлом 2 блока перемещения 3 по одной координате (Z) и блока перемещений 4 по двум взаимно перпендикулярным координатам (X, Y) с другим свободным концом совмещенного узла, оканчивающимся держателем объекта 5. Следует отметить, что взаимное расположение блоков 3 и 4 может быть обратным, в частном случае эти блоки могут быть выполнены из пьезокерамических трубок. Случай использования устройства перемещений в качестве пьезосканера в сканирующем зондовом микроскопе (СЗМ) и конкретные варианты исполнения известных устройств перемещения приведены в [3, 4].
Согласно изобретению, в устройство введены упоры 6, 7, которые отделены зазорами от свободного конца совмещенного узла 2 и держателя объекта 5. Величина зазоров устанавливается большей, чем величина функциональных перемещений свободного конца совмещенного узла 2 и держателя объекта 5, в направлении соответствующих упоров, но меньшей, чем предельно допустимые по прочности совмещенного узла отклонения в тех же направлениях. В предпочтительном исполнении упоры 6, 7 установлены попарно (фиг.2) напротив друг друга, ограничивая перемещения во взаимно противоположных направлениях. Возможен вариант, в котором каждому упору 6, 7 на основании соответствуют упорные площадки 8 (фиг.3) на свободном конце совмещенного узла 2 и держателя объекта 5. Такой вариант предпочтителен в том случае, когда упоры 6 и 7 расположены напротив хрупких частей устройства, например пьезокерамических элементов сопряженного узла 2 либо микромеханических элементов держателя объекта 5 (не показано).
Возможен также вариант, в котором упоры и упорные площадки в своих основаниях 9 и 10 (фиг.4) выполнены из диэлектрического материала и заканчиваются плоскопараллельными электродами 11, 12, являющимися обкладками конденсатора емкостного датчика перемещений устройства, с перпендикуляром к плоскости электрода, направленным вдоль соответствующего упора и соответствующей оси перемещения (X, Y или Z). Существует вариант, в котором зазор между упором и упорной площадкой заполнен вязкой жидкостью 13 (фиг.5), удерживаемой по периметру зазора силами поверхностного натяжения жидкости, а по периметру сопряженных частей упора и упорной площадки выполнено кольцевое обнижение 14, расширяющее внешнюю часть зазора. Более предпочтительным вариантом является исполнение устройства, в котором осуществлена комбинация вариантов исполнения упоров и в виде упоров с упорными площадками и в виде элементов емкостного датчика и в виде компонентов демпфера. В этом исполнении электроды 15 имеют диаметр меньший, чем диаметры диэлектрических оснований 16, так что образующийся уступ 17 между электродом и диэлектрическим основанием выполняет функцию обнижения 14.
Устройство перемещения работает следующим образом. От блока управления 18 падают управляющие сигналы на сопряженный узел 2. Алгоритмы управления устройством перемещения, используемого в качестве пьезосканера в СЗМ, приведены в [3]. Свободный конец совмещенного узла перемещений 2 с держателем объекта 5 совершает заданные перемещения, при этом упоры 6, 7 не препятствуют этим перемещениям, поскольку зазоры достаточно велики. При различных манипуляциях с устройством перемещения, например при установке на держатель объекта 5 образца или зонда (не показаны), возникают нештатные ситуации: удары, приложение чрезмерных усилий, таких, что в обычной конструкции вызвало бы отклонение свободного конца совмещенного узла, большего предельно допустимого по прочности. Согласно данному изобретению, в описанной нештатной ситуации упоры 6, 7 или их варианты исполнения с упорными площадками 8 составных частей 9, 10, 11, 12, 15, 16 емкостных датчиков препятствуют совершению предельно допустимых отклонений и разрушению устройства. Кроме основной функции упоров - защиты от недопустимых перемещений, в другом исполнении они образуют конденсаторы емкостных датчиков перемещений, что вместе с соответствующим блоком управления устройства перемещения придает ему метрологические качества.
Исполнение упоров с вариантом заполнения зазора вязкой жидкостью обеспечивает выполнение ими демпфирующих функций, что увеличивает помехозащищенность устройства перемещения и позволяет повысить регулируемую блоком управления 18 скорость перемещения без возбуждения паразитных механических колебаний совмещенного узла 2. В демпфирующем исполнении по периметру упоров и упорных площадок выполняют обнижение 14, расширяющее внешнюю часть зазора с целью образования в этой части буферного объема для вязкой жидкости, обеспечивающего гарантированное заполнение жидкостью основной узкой рабочей части зазора при всех функциональных перемещениях совмещенного узла 2 и держателя объекта 5.
Наиболее предпочтительным вариантом является исполнение упоров, в котором осуществлена комбинация их функций и как упоров, и как емкостных датчиков, и как демпферов, при этом вязкая жидкость должна обладать свойствами диэлектрика и гарантированно заполнять пространство между электродами 15. В качестве вязкой жидкости для заполнения зазора предпочтительно использовать соединения с минимальным давлением паров, ограничивающим испарение жидкости и сохранение ее объема, с наибольшей стойкостью к окислению на воздухе, обеспечивающей максимальный срок функционирования. Из известных соединений наиболее подходящими являются кремнийорганические соединения, например, полиметил- или мелиэтилсилоксановые жидкости.
Выполнение устройства требует создание в упоре зазора определенной величины, а в варианте с плоскопараллельными окончаниями упоров и упорных площадок, как в варианте с емкостными датчиками, еще и параллельности соответствующих элементов, образующих зазор. Такой зазор обеспечивают, предварительно помещая между сопрягаемыми элементами калибровочную пленку заданной толщины, поджимая друг к другу и фиксируя в таком положении сопрягаемые изначально свободные для взаимного перемещения упоры 6, 7 и упорные площадки 8 (или их варианты). Затем калибровочную пленку удаляют.
Таким образом, введение упоров в конструкцию устройства перемещения позволяет повысить его надежность, устранив почти неизбежную возможность поломки в известном устройстве, особенно при использовании в нем хрупких пьезокерамических элементов.
Это предохранительное свойство упоров обеспечивается выбором величины зазоров между упорами и противолежащими им частями совмещенного узла перемещений и держателя объекта. Величина этих зазоров должна быть такой, чтобы не препятствовать перемещениям совмещенного узла вместе с держателем объекта и в то же время не допускать перемещений, больших, критических. Такое исполнение зазоров в упорах не ограничивает выполнение устройства основных функций, а именно функций перемещения, и в то же время, наделяет упоры защитными свойствами.
Попарное расположение упоров напротив друг друга осуществляет защиту от чрезмерных деформаций совмещенного узла перемещений и держателя объекта во взаимно-противоположных направлениях воздействия, дополнительно улучшая защитные функции упоров.
Введение упорных площадок напротив каждого из упоров дает дополнительную защиту хрупких элементов устройства перемещения, например, таких, как пьезокерамические элементы совмещенного узла перемещений или тонкостенные части держателя объекта.
Предпочтительное расположение упоров по осям перемещений X, Y, Z устройства позволяет гарантированно предохранять его от повреждений для всех возможных направлений неконтролируемого воздействия, а в исполнении, совмещающем выполнение упорами еще и функций емкостных датчиков перемещений, обеспечивает измерение перемещений именно по осям координат функциональных перемещений устройства. В то же время, в нижеописанном исполнении, совмещающем выполнение упорами еще и демпфирующих функций, такое расположение упоров позволяет осуществлять взаимно-независимое демпфирование перемещений по направлению осей ортогональной системы координат.
Исполнение упоров и упорных площадок из диэлектрических материалов, покрытых плоскими электродами с определенной ориентацией относительно осей координат, позволяет совместить их основное защитное назначение с дополнительной функцией, функцией емкостного датчика перемещений, необходимых при проведении метрологических измерений с использованием устройства перемещений.
Конфигурация обращенных друг к другу частей упоров и упорных площадок, имеющая расширение периферийной части зазора между ними и обеспечивающая создание буферного объема для вязкой жидкости, заполняющей зазор в этом варианте устройства, имеет целью выполнение упорами еще одной функции, а именно функции демпфера. Демпфирующие качества позволяют подавлять возможность возбуждения паразитных колебаний устройства перемещений при увеличении скорости перемещения и приближении ее к резонансной частоте механических колебаний узла перемещений. Следовательно, демпфирующие свойства упоров в этом специальном исполнении позволяют увеличить скорость перемещений устройства.
Наиболее предпочтительным исполнением в отдельных случаях применения предлагаемого устройства является такое, в котором совмещены функции упоров как таковых с функциями демпфера и емкостного датчика перемещений.
ЛИТЕРАТУРА
1. Патент США №5173605, G 01 №23/00, 1992.
2. Патент России (прототип), №2231095 С2, 20.06.2004.
3. В.А.Быков и др. Зондовая микроскопия для биологии и медицины. Сенсорные системы. Т.12, №1, 1998, с.99-121.
4. A new ultra-high vacuum scanning tunneling microscope design for surface science studies. G.E.Poirier and J.M.White. Rev.Sci. Instrum., GO (10), October, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ОПТИЧЕСКИМ МИКРОСКОПОМ | 2002 |
|
RU2244332C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ НАНОТОМОГРАФ С МОДУЛЕМ ОПТИЧЕСКОГО АНАЛИЗА | 2016 |
|
RU2645437C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2006 |
|
RU2366008C2 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА В РЕЖИМЕ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2015 |
|
RU2597959C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| ПЬЕЗОСКАНЕР МНОГОФУНКЦИОНАЛЬНЫЙ И СПОСОБ СКАНИРОВАНИЯ В ЗОНДОВОЙ МИКРОСКОПИИ | 2003 |
|
RU2248628C1 |
Изобретение относится к нанотехнологии, а более конкретно к устройствам перемещения по трем координатам. Например, устройство перемещения может быть использовано в качестве сканера в зондовой микроскопии. В устройстве перемещения, состоящем из основания с закрепленным на нем одним концом совмещенным узлом блока перемещения по одной координате (Z) и блока перемещений по двум взаимно перпендикулярным координатам (X, Y), другим свободным концом совмещенного узла вместе с расположенным на нем держателем объекта, на упомянутом основании введены упоры, размещенные через зазоры напротив упомянутых свободного конца совмещенного узла и держателя объекта, а величины зазоров превышают величины функциональных перемещений конца совмещенного узла и держателя объекта в направлении соответствующих упоров, но меньше, чем предельно допустимые по прочности совмещенного узла отклонения в тех же направлениях. Подобное исполнение устройства перемещения повышает его надежность и придает ему метрологические качества. 6 з.п. ф-лы, 7 ил.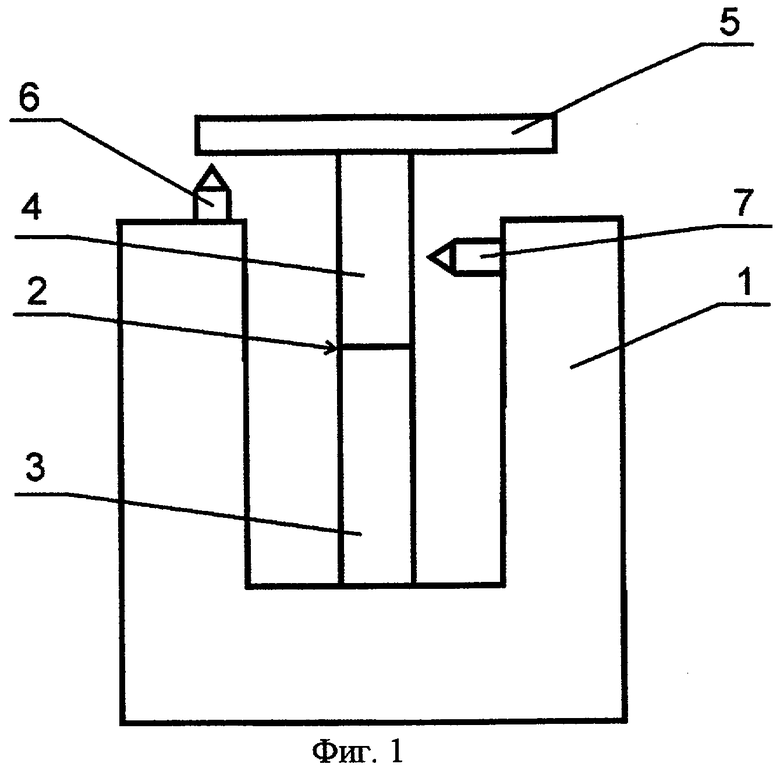
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2002 |
|
RU2231095C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| US 5173605 А, 22.12.1992 | |||
| JP 11118813 А, 30.04.1999 | |||
| JP 2001221733 А, 17.08.2001. | |||

