Предлагаемое изобретение относится к области, связанной с наведением космических аппаратов на заданную орбиту, при котором обеспечиваются заданные параметры их движения в конце маневра.
Наиболее близким техническим решением является способ формирования программы ориентации разгонного блока (РБ) в продольном управлении при выполнении активного маневра [1], заключающийся в том, что в процессе реализации этого маневра периодически с тактом терминального управления Ту прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя (МД), определяют по ним прогнозируемые отклонения по радиусу, по радиальной скорости от их значений на заданной орбите и поправки к параметрам программ ориентации по тангажу, обеспечивающие выполнение терминальных условий, и формируют на их основе уточненную программу ориентации разгонного блока по тангажу ϑпр на очередной интервал терминального управления в виде:

где ϑпр - программный угол тангажа разгонного блока;
ϑ0 - начальное значение программного угла;
 - скорость изменения программного угла;
- скорость изменения программного угла;
t - время, отсчитываемое от момента выполнения прогноза.
Для начала управления значения параметров ϑ0, задаются в полетном задании.
Недостатком известного способа является предположение, что вектор тяги  маршевого двигателя направлен по продольной оси разгонного блока. Отклонение вектора тяги маршевого двигателя от продольной оси на угол Δϑр приводит к ошибке реализации заданного траекторного движения.
маршевого двигателя направлен по продольной оси разгонного блока. Отклонение вектора тяги маршевого двигателя от продольной оси на угол Δϑр приводит к ошибке реализации заданного траекторного движения.
При использовании в разгонных блоках маршевых двигателей для угловой стабилизации создание с их помощью управляющих моментов относительно центра масс выполняется путем отклонения камеры сгорания маршевого двигателя относительно продольной оси. При этом средняя (балансировочная) составляющая отклонения камеры сгорания маршевого двигателя, характеризуемая углом Δϑд, оказывает наибольшее влияние на точность реализации траекторного движения. Величина балансировочного отклонения камеры сгорания маршевого двигателя зависит от смещения центра масс разгонного блока относительно его продольной оси, деформации рамы подвеса маршевого двигателя, ошибки установки оси камеры сгорания и других причин.
Техническим результатом изобретения является компенсация влияния отклонения вектора тяги маршевого двигателя относительно продольной оси на точность реализации заданного траекторного движения и повышение тем самым точности формирования заданной орбиты.
Указанный технический результат достигается тем, что в известном способе формирования программы ориентации разгонного блока при терминальном управлении наведением его на заданную орбиту, заключающемся в том, что при текущем значении программного угла тангажа и скорости его изменения на каждом такте терминального управления прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя, определяют по ним отклонения радиуса и радиальной скорости от их значений на заданной орбите, формируют сигналы коррекции по углу и угловой скорости тангажа, корректируют значения угла тангажа и угловой скорости, определяют программу ориентации вектора тяги для очередного интервала терминального управления, дополнительно определяют по проекциям измеренных кажущихся ускорений на оси системы координат, принятой для отсчета программного угла тангажа, ориентацию вектора тяги маршевого двигателя в этой системе координат и его отклонение от значения программного угла ориентации вектора тяги, выполняют нелинейную фильтрацию этого отклонения и последующее нелинейное преобразование отфильтрованного сигнала, интегрируют преобразованный сигнал, ограничивают его на заданном уровне и определяют программу ориентации разгонного блока путем вычитания этого ограниченного сигнала из программы ориентации вектора тяги маршевого двигателя.
Таким образом, указанный технический результат достигается тем, что разгонный блок отклоняют по тангажу на дополнительный угол Δϑд в сторону, противоположную отклонению вектора тяги маршевого двигателя относительно продольной оси, и с этой целью программа ориентации разгонного блока, определяемая углом  , должна задаваться в виде:
, должна задаваться в виде:
обеспечивающем расчетное направление тяги, определяемое углом ϑпр,
где - скорректированный программный угол тангажа разгонного блока;
ϑпр - программный угол тангажа разгонного блока;
Δϑд - угол отклонения маршевого двигателя.
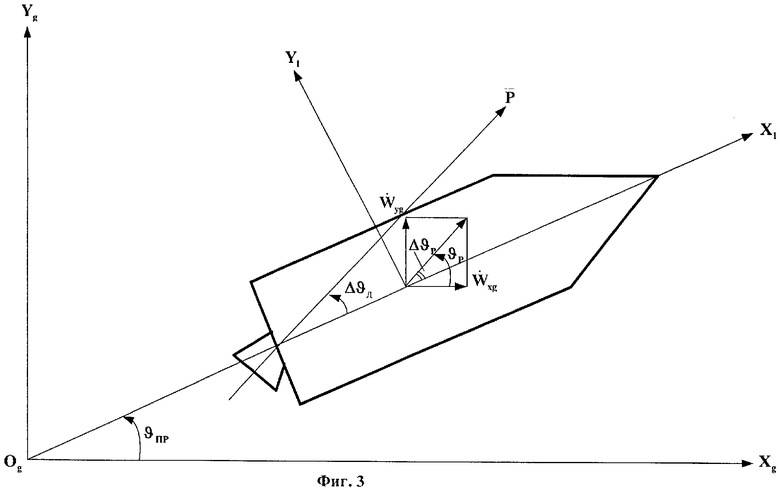
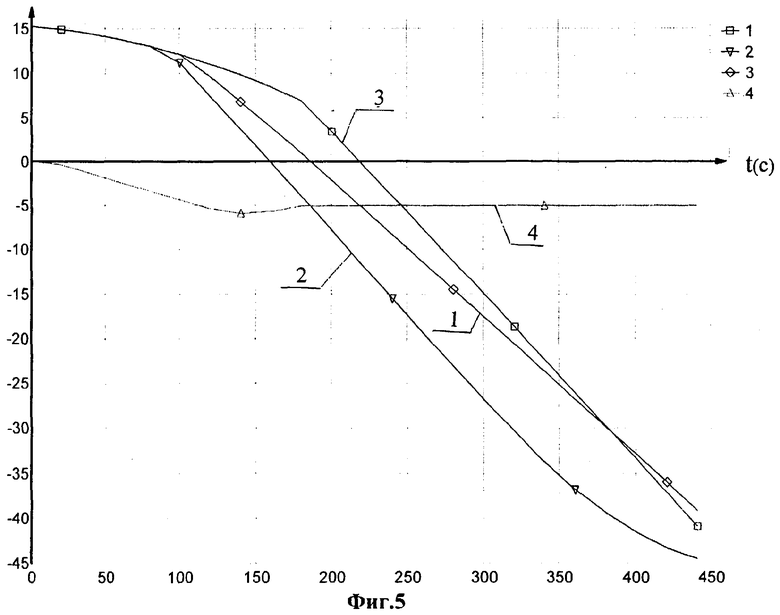
На фиг.1 представлена структурная схема блока формирования программы ориентации разгонного блока по известному способу, определяющему требуемое направление вектора тяги маршевого двигателя; на фиг.2 дана блок-схема контура формирования программы ориентации разгонного блока по предлагаемому способу; на фиг.3 показаны углы ориентации вектора тяги ϑр, программной ориентации вектора тяги ϑпр и отклонения направления вектора тяги Δϑр от его программной ориентации; на фиг.4 представлена структура блоков нелинейной ориентации, нелинейного преобразования и формирования компенсирующей поправки; на фиг.5 показано изменение программ ориентации разгонного блока в процессе его наведения на заданную орбиту по известному и предлагаемому способам при различных значениях углов отклонения вектора тяги в балансировке.
Структурная схема блока формирования программы ориентации разгонного блока, реализующая известный способ, представлена на фиг.1, где 1 - блок прогноза отклонений (БПО) от заданной орбиты и расчета функций чувствительности, 2 - блок корректирующих поправок (БКП) программного управления, 3 - блок коррекции (БК) параметров программы ориентации.
В блоке 1 (БПО) по известным параметрам программы ориентации ϑ0 и непрерывно определяется текущее значение ϑпр. На каждом i-м такте терминального управления для прогнозируемого момента отключения маршевого двигателя вычисляются отклонения от заданной орбиты по радиус-вектору ΔR, по радиальной скорости ΔV и функции чувствительности L, J, S, Q вычисляемых отклонений к изменению параметров программы ориентации - угла тангажа и скорости его изменения.
На основе этих данных в блоке 2 (БКП) вычисляются корректирующие поправки Δϑ0i,  к параметрам программы ориентации, а в блоке 3 (БК) определяются скорректированные параметры программы ориентации на очередном такте терминального управления.
к параметрам программы ориентации, а в блоке 3 (БК) определяются скорректированные параметры программы ориентации на очередном такте терминального управления.
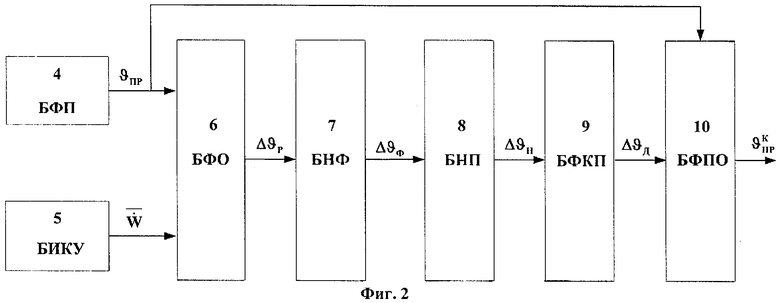
Блок-схема контура формирования программы ориентации разгонного блока по предлагаемому способу представлена на фиг.2, где 4 - блок формирования программы ориентации (БФП) по известному способу, 5 - блок измерения кажущихся ускорений (БИКУ), 6 - блок формирования отклонения (БФО) вектора тяги относительно продольной оси, 7 - блок нелинейной фильтрации (БНФ), 8 - блок нелинейного преобразования (БНП), 9 - блок формирования компенсирующей поправки (БФКП), 10 - блок формирования программы ориентации (БФПО) по предлагаемому способу.
В блоке 4 (БФП) по известному способу формируется программа ориентации вектора тяги ϑпр вида (1).
Из блока 5 (БИКУ) поступают значения проекций измеренных кажущихся ускорений разгонного блока  ,
,  на оси системы координат Og Xg Yg, используемой для отсчета программного и текущего углов тангажа (фиг.3).
на оси системы координат Og Xg Yg, используемой для отсчета программного и текущего углов тангажа (фиг.3).
В блоке 6 (БФО) вычисляется рассогласование между направлением вектора тяги и программной ориентации ϑпр, определяемое углом Δϑр. Для этого определяется текущая ориентация вектора тяги - угол ϑр:
Угол ϑр может быть представлен в виде:
ϑр=ϑпр+Δϑр
и поэтому
sinϑp=sinϑпр·cosΔϑp+cosϑпр·sinΔϑр.
Учитывая малые значения угла рассогласования Δϑр, его значение определяется из последнего уравнения по формуле:
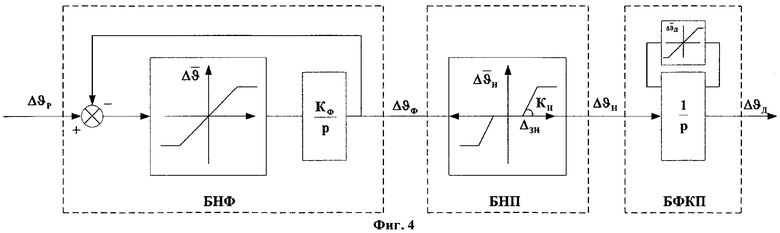
Сигнал рассогласования проходит через цепочку последовательных блоков 7, 8, 9, структура которых представлена на фиг.4. Передаточная функция блока 7 (БНФ) имеет вид:
где  постоянная времени фильтра;
постоянная времени фильтра;
Кф - коэффициент усиления линейного участка характеристики.
Максимальная скорость изменения выходного сигнала Δϑф блока 7 (БНФ) определяется величиной ограничения  и коэффициентом Кф.
и коэффициентом Кф.
Блок 7 (БНФ) исключает прохождение высокочастотных составляющих сигнала Δϑр на вход блока 8 (БНП).
Блок 8 (БНП) представляет собой нелинейное звено, состоящее из ограничения выходного сигнала на уровне  , зоны нечувствительности Δзн и имеющие коэффициент усиления Кн на линейном участке характеристики. Сигнал
, зоны нечувствительности Δзн и имеющие коэффициент усиления Кн на линейном участке характеристики. Сигнал  на выходе блока 8 (БНП) формируется по зависимости:
на выходе блока 8 (БНП) формируется по зависимости:
В блоке 9 (БФКП) выполняется интегрирование сигнала Δϑн и ограничение выходного сигнала Δϑд на уровне ±Δϑд:

Программа ориентации  формируется в блоке 10 (БФПО), на первый вход которого из блока 4 (БФП) поступает сигнал программы ориентации вектора тяги ϑпр, а на второй - сигнал Δϑд из блока 9 (БФКП):
формируется в блоке 10 (БФПО), на первый вход которого из блока 4 (БФП) поступает сигнал программы ориентации вектора тяги ϑпр, а на второй - сигнал Δϑд из блока 9 (БФКП):
Угол Δϑд изменяется до тех пор, пока ориентация вектора тяги ϑр не станет равным сформированному программному углу ориентации ϑпр. В этом случае Δϑр=0 и на вход блока 9 (БФКП) поступает сигнал Δϑн=0, что свидетельствует о достижении углом Δϑд значения, равного балансировочному отклонению камеры маршевого двигателя.
Для оценки эффективности предлагаемого способа формирования программы ориентации РБ с учетом компенсации отклонения вектора тяги маршевого двигателя проведено сравнительное моделирование выведения разгонного блока на целевую круговую орбиту с высотой Нкр=212244 м при использовании этого способа и прототипа.
Значения высот апогея На и перигея Нп при различных значениях углов балансировочного отклонения камеры сгорания маршевого двигателя δмд, требуемых для парирования соответствующих возмущающих моментов, приведены в таблице для двух способов управления. Там же приведены отклонения высот апогея ΔНа и перигея ΔНп относительно заданной высоты Нкр круговой орбиты.
Как видно из приведенных результатов, применение предлагаемого способа в условиях отклонения камеры сгорания маршевого двигателя на 5 градусов обеспечивает компенсацию этого возмущения и позволяет достигать при этом точности параметров формируемой орбиты, которые дает способ прототип при условии совпадения направления вектора тяги с продольной осью разгонного блока.
При моделировании были использованы значения параметров в блоках на фиг.4:  Кф=0,15 1/с,
Кф=0,15 1/с,  Δзн=0,16 град,
Δзн=0,16 град,  Кн=0,15.
Кн=0,15.
На фиг.5 представлены процессы формирования программ ориентации в процессе наведения на заданную орбиту и цифрами 1÷4 обозначены следующие параметры:
1, 2 - программный угол ориентации ϑпр для вариантов 1 и 2 таблицы,
3 - программный угол ориентации  для варианта 3 таблицы,
для варианта 3 таблицы,
4 - изменение угла Δϑд в варианте 3.
Источники информации.
1. А.С.Сыров, В.Н.Соколов, В.В.Ежов, Л.И.Кислик "Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью". Авиакосмическая техника и технология, №1, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2010 |
|
RU2454357C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА | 2010 |
|
RU2432595C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2003 |
|
RU2254271C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2223894C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2211786C1 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
Изобретение относится к области терминального управления траекторным движением разгонных блоков, выводящих космические аппараты на заданную орбиту с помощью маршевого двигателя. Поворотная камера сгорания данного двигателя используется для угловой ориентации и стабилизации разгонного блока с аппаратом. В предлагаемом способе прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя, определяют по ним отклонения радиуса и радиальной скорости от их значений на заданной орбите, корректируют значения угла и угловой скорости тангажа, определяют программу ориентации вектора тяги для очередного интервала терминального управления. При этом определяют по проекциям измеренных кажущихся ускорений угол фактической ориентации вектора тяги маршевого двигателя и рассогласование между фактическим и программным углами ориентации тяги. Производят нелинейную фильтрацию этого рассогласования, его нелинейное преобразование и интегрирование. Программа ориентации разгонного блока определяется как разность между программным углом ориентации тяги и сигналом, полученным после интегрирования. Техническим результатом изобретения является компенсация влияния отклонения вектора тяги маршевого двигателя относительно продольной оси разгонного блока на его траекторное движение и повышение тем самым точности формирования заданной орбиты. 5 ил., 1 табл.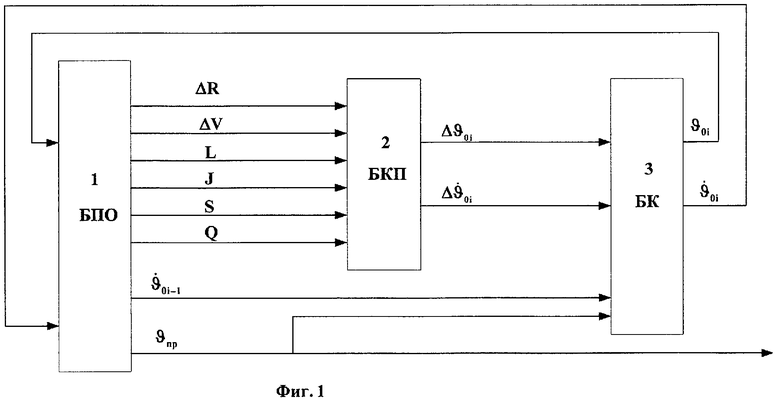
Способ формирования программы ориентации разгонного блока при терминальном управлении наведением его на заданную орбиту, заключающийся в том, что при текущем значении программного угла тангажа и скорости его изменения на каждом такте терминального управления прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя, определяют по ним отклонения радиуса и радиальной скорости от их значений на заданной орбите, формируют сигналы коррекции по углу и угловой скорости тангажа, корректируют значения угла и угловой скорости тангажа, определяют программу ориентации вектора тяги для очередного интервала терминального управления, отличающийся тем, что определяют по проекциям измеренных кажущихся ускорений на оси системы координат, принятой для отсчета программного угла тангажа, ориентацию вектора тяги маршевого двигателя в этой системе координат и его отклонение от значения программного угла ориентации вектора тяги, выполняют нелинейную фильтрацию этого отклонения и последующее нелинейное преобразование отфильтрованного сигнала, интегрируют преобразованный сигнал, ограничивают его на заданном уровне и определяют программу ориентации разгонного блока путем вычитания этого ограниченного сигнала из программы ориентации вектора тяги маршевого двигателя.
| СЫРОВ А.С., СОКОЛОВ В.Н | |||
| и др | |||
| Алгоритм наведения разгонного блока с нерегулируемым маршевым двигателем и малой тяговооруженностью | |||
| Авиакосмическая техника и технология | |||
| Способ и аппарат для получения гидразобензола или его гомологов | 1922 |
|
SU1998A1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2211786C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2223894C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ УСЛОВНОГО ВРЕМЕНИ СГОРАНИЯ МАССЫ РАЗГОННОГО БЛОКА | 2001 |
|
RU2209158C1 |
| US 4537375 А, 27.08.1985. | |||

