Изобретение относится к области, связанной с управлением движением разгонного блока (РБ) при наведении его на заданную орбиту.
Наиболее близким техническим решением является способ коррекции параметров программы ориентации РБ, заключающийся в том, что прогнозируют параметры движения РБ на момент отсечки маршевого двигателя (МД), определяют по ним отклонения радиус-вектора и радиальной скорости центра масс РБ от их значений на заданной орбите, формируют сигналы коррекции управления по углу и угловой скорости тангажа, ограничивают сигнал коррекции по углу тангажа на заданном уровне и изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально значению сигнала коррекции по углу тангажа, сформированному до ограничения этого сигнала [1].
Коррекция параметров программы ориентации с помощью терминального управлении основывается на том, что прогнозируемые отклонения по радиальной скорости ΔV0 и радиус-вектору ΔR0 от требуемых величин на заданной орбите будут приведены к нулевым значениям в прогнозируемый момент отсечки маршевого двигателя Тпр. Фактическая отсечка МД выполняется в момент Тф при достижении текущим функционалом энергии заданного в полетном задании значения.
Недостатком известного способа коррекции параметров программы ориентации является тот факт, что за счет разницы времен ΔT=Тф-Тпр маневр заканчивается с отличными от нуля отклонениями по радиальной скорости ΔVк и радиус-вектору ΔRк, что отражается на точности формируемой орбиты.
Техническим результатом изобретения является повышение точности формируемой орбиты.
Указанный технический результат достигается тем, что в известном способе коррекции параметров программы ориентации РБ, заключающемся в том, что прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя, определяют по ним отклонения радиус-вектора и радиальной скорости центра масс РБ от их значений на заданной орбите, формируют сигналы коррекции управления по углу и угловой скорости тангажа, ограничивают сигнал коррекции по углу тангажа на заданном уровне и изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально значению сигнала коррекции по углу тангажа, сформированному до ограничения этого сигнала, дополнительно на установленном интервале времени до прогнозируемого момента отсечки маршевого двигателя принимают прогнозируемое отклонение по радиус-вектору равным нулю.
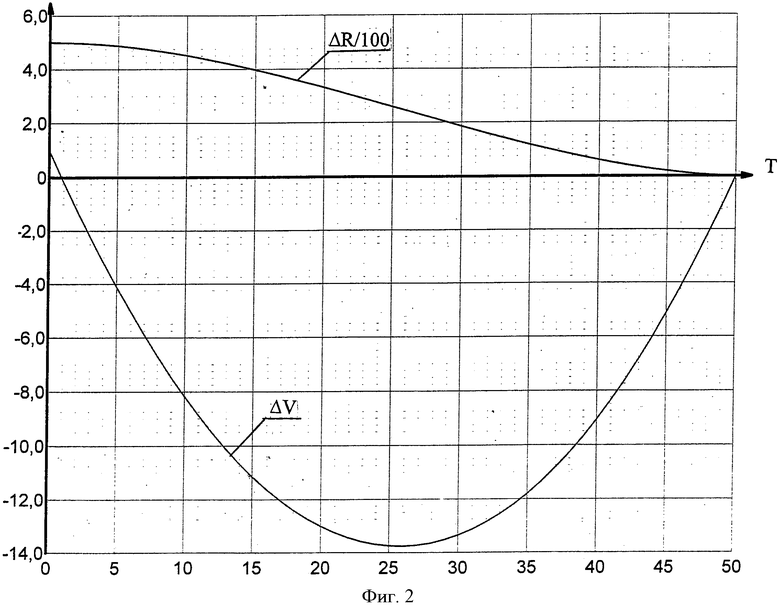
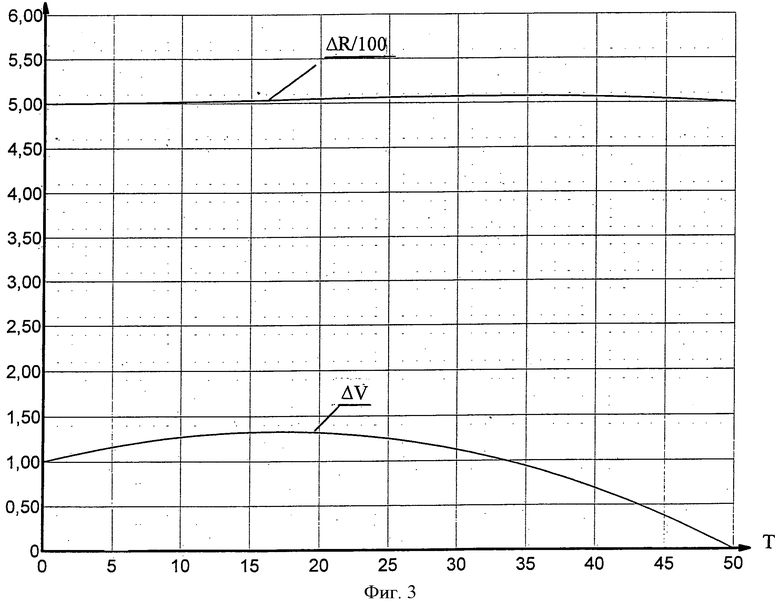
На фиг.1 представлен процесс возникновения отклонений по радиальной скорости ΔVк и радиус-вектору ΔRк в конце маневра из-за отличия прогнозируемого Тпр и фактического Тф времени отсечки МД, на фиг.2 представлен процесс изменения отклонений ΔV, ΔR по способу-прототипу, а на фиг.3 - по предлагаемому способу.
Эффективность обнуления радиус-вектора определяется из следующих соображений.
Для продольного движения используется линейная по времени программа ориентации РБ по углу тангажа ϑпр=ϑ+ ·t, где ϑ и
·t, где ϑ и  - угол и угловая скорость на очередном такте терминального управления, а время t отсчитывается от начала этого такта.
- угол и угловая скорость на очередном такте терминального управления, а время t отсчитывается от начала этого такта.
Реакция отклонений ΔR0, ΔV0 на изменение управляющих параметров Δϑ, Δ определяется функциями чувствительности:
 ,
,  ,
, 
которые имеют следующий вид:

где U - удельный импульс МД;
τ - условное время сгорания массы РБ;
ts - время, оставшееся до конца маневра.
Сигналы коррекции в виде поправок по параметрам управления Δϑ, Δ, компенсирующие прогнозируемые отклонения ΔV0, ΔR0, определяются из системы уравнений:

Решение системы (2) дает:


где

Если вычисленная корректирующая поправка по углу тангажа Δϑ превышает допустимый уровень Δ , то ее величина ограничивается этим значением:
, то ее величина ограничивается этим значением:

В этом случае вычисленная корректирующая поправка по угловой скорости тангажа Δ изменяется пропорционально уровню ограничения угловой поправки Δ и обратно пропорционально угловой поправке, сформированной до ее ограничения, то есть принимается равной
 .
.
При кажущемся ускорении  от работы МД и вычисленных поправках Δϑ,
от работы МД и вычисленных поправках Δϑ,
Δ к программе ориентации изменение по времени отклонений в конечной (терминальной) точке описывается уравнениями:


или


где функции  ,
,  ,
,  ,
,  зависят от времени и соответствуют функциям (1) при замене tS на t. С учетом этого и используя (3) и (4), последние два уравнения представляются в виде:
зависят от времени и соответствуют функциям (1) при замене tS на t. С учетом этого и используя (3) и (4), последние два уравнения представляются в виде:


К прогнозируемому моменту отсечки МД отклонения ΔR, ΔV обнуляются, но подходят к этим значениям с отличными от нуля производными  ,
,  .
.
Поскольку отсечка МД выполняется в момент Тф при достижении функционалом энергии заданного в полетном задании значения, а отработка отклонений до нулевого уровня должна заканчиваться в прогнозируемый момент Тпр отсечки МД, то в случае отличия этих моментов на величину ΔТ=Тф-Тпр при ≠0, ≠0, окончание маневра выполняется с ошибками ΔRк и ΔVк (фиг.1):
 ,
,
 ,
,
влияющими на точность формирования орбиты.
После дифференцирования зависимостей (10), (11) получим:


или


где градиенты по параметрам ΔR0, ΔV0 имеют следующий вид:




Из определения функций чувствительности следует, что
 ,
,
 .
.
С учетом этого приведенные выше градиенты при t=ts принимают вид:


и из этого следует, что

В конце маневра при отработке малого отклонения радиальной скорости ΔV0 в соответствии с (12) скорость изменения радиальной погрешности в момент отсечки МД достаточно мала. Поэтому радиальная ошибка ΔRк, которая может возникнуть из-за разницы ΔT прогнозируемого и фактического моментов отсечки МД, практически не скажется на параметрах формируемой орбиты. Основная погрешность формирования орбиты возникает за счет радиального ускорения , в котором существенный вес имеет составляющая, зависящая от радиального отклонения ΔR0. Для устранения ее влияния в предлагаемом способе коррекции параметров программы ориентации на установленном интервале времени ТR перед отсечкой МД отклонение по радиус-вектору ΔR0 принимается равным нулю.
Величина интервала времени ТR задается в полетном задании и должна обеспечивать не менее одного такта терминального управления с использованием предлагаемого способа коррекции параметров программы ориентации. Для маневров малой продолжительности начало интервала времени TR может совпадать с началом терминального управления.
Для оценки влияния прогнозируемых отклонений ΔR0, ΔV0 на радиальное ускорение в таблице приведены расчетные данные на момент окончания терминального управления (за 50 секунд до прогнозируемого момента отсечки МД на последнем маневре).






На фиг.2 представлен процесс отработки отклонений ΔR0=500 м и ΔV0=1 м/с по известному способу-прототипу при условиях, соответствующих приведенной таблице, а на фиг.3 - по предлагаемому способу.
При отклонениях ΔR0=500 м и ΔV0=1 м/с радиальное ускорение в конце маневра в способе-прототипе равно =1.314 м/с2, что при разнице в 0.5 с между прогнозируемым и фактическим временами отсечки МД дает отклонение по радиальной скорости 0.65 м/с. Если бы при этих условиях поправки к программе ориентации вычислялись без учета радиального отклонения, как в предлагаемом способе коррекции, то отклонение по радиальной скорости было бы равным 0.0408 м/с, то есть в 16 раз меньше. Для геостационарной орбиты с высотой Н=35863095 м радиальная скорость 0.65 м/с приводит к отклонению по высоте 8935 м, а при 0.0408 м/с - к отклонению 561 м, что даже с учетом некомпенсированного радиального отклонения в 500 м показывает эффективность предлагаемого способа.
Таким образом, предлагаемый способ коррекции параметров программы ориентации повышает точность формируемой орбиты за счет того, что на установленном интервале времени до прогнозируемого момента отсечки маршевого двигателя принимают прогнозируемое отклонение по радиус-вектору равным нулю.
Источники информации
1. Патент РФ №2211786, 18.01.2002, B64G 1/24.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2003 |
|
RU2254271C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2010 |
|
RU2454357C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ ЕГО НАВЕДЕНИЕМ НА ЗАДАННУЮ ОРБИТУ | 2005 |
|
RU2282568C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ВРЕМЕНИ ОКОНЧАНИЯ МАНЕВРА И ОТСЕЧКИ МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА | 2011 |
|
RU2467930C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2223894C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ КАЛИБРОВКИ ИМПУЛЬСА ТЯГИ МАРШЕВОГО ДВИГАТЕЛЯ | 2009 |
|
RU2388665C1 |
Изобретение относится к области, связанной с управлением движением разгонного блока (РБ) при выведении его на заданную орбиту. Техническим результатом изобретения является повышение точности формируемой орбиты. Он достигается тем, что терминальное управление обеспечивает отработку отклонений от заданной орбиты по радиальной скорости ΔМ и радиус-вектору ΔR в прогнозируемый момент Тпр отсечки маршевого двигателя (МД). При этом фактическая отсечка МД выполняется в момент Тф при достижении текущим функционалом энергии заданного в полетном задании значения. При не совпадении моментов Тпр и Тф маневр заканчивается с отклонениями по радиальной скорости ΔVк и радиус-вектору ΔRк, что сказывается на точности формируемой орбиты. В предложенном способе прогнозируют параметры движения РБ на момент отсечки МД. По этим параметрам определяют отклонения радиус-вектора и радиальной скорости центра масс РБ от их значений на заданной орбите. Формируют сигналы коррекции управления по углу и угловой скорости РБ в канале тангажа. При этом ограничивают сигнал коррекции по углу тангажа на заданном уровне. Далее изменяют сигнал коррекции по угловой скорости тангажа пропорционально этому уровню ограничения и обратно пропорционально значению сигнала коррекции по углу тангажа, сформированному до указанного ограничения, и на установленном интервале времени до прогнозируемого момента отсечки МД принимают прогнозируемое отклонение по радиус-вектору равным нулю. 3 ил., 1 табл.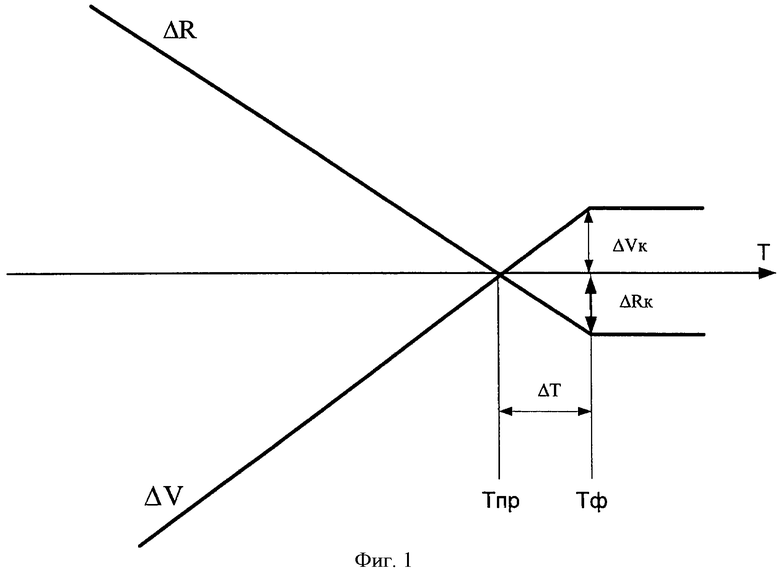
Способ коррекции параметров программы ориентации разгонного блока, заключающийся в том, что прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя, определяют по ним отклонения радиус-вектора и радиальной скорости центра масс разгонного блока от их значений на заданной орбите, формируют сигналы коррекции управления по углу и угловой скорости тангажа, ограничивают сигнал коррекции по углу тангажа на заданном уровне и изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально значению сигнала коррекции по углу тангажа, сформированному до ограничения этого сигнала, отличающийся тем, что на установленном интервале времени до прогнозируемого момента отсечки маршевого двигателя принимают прогнозируемое отклонение по радиус-вектору равным нулю.
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2211786C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| US 4537375 A, 27.08.1985. | |||

