Предлагаемое изобретение относится к области терминального управления и может быть использовано в системах управления движением космических аппаратов, в частности разгонных блоков.
Известен способ коррекции параметров программы ориентации при терминальном управлении наведением разгонного блока (РБ) на заданную орбиту [1], заключающийся в том, что прогнозируют параметры движения РБ на момент отсечки маршевого двигателя, определяют по ним отклонения радиуса ΔR и радиальной скорости ΔV от их значений на заданной орбите, определяют чувствительность этих траекторных параметров к изменению параметров программы ориентации, формируют сигналы коррекции управления по углу тангажа Δϑ и угловой скорости тангажа  , ограничивают сигнал коррекции по углу тангажа на заданном уровне
, ограничивают сигнал коррекции по углу тангажа на заданном уровне  и изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально сформированному значению сигнала коррекции по углу, тангажа. Эти поправки суммируют с программными значениями угла тангажа ϑ и угловой скорости
и изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально сформированному значению сигнала коррекции по углу, тангажа. Эти поправки суммируют с программными значениями угла тангажа ϑ и угловой скорости  , определяя тем самым новые значения параметров программы ориентации.
, определяя тем самым новые значения параметров программы ориентации.
Недостатком известного способа является скачкообразное изменение программы ориентации РБ за счет коррекции угла тангажа, что отражается на точности стабилизации РБ относительно заданной ориентации. При скачках в программе ориентации (даже ограниченных) угловые отклонения угла тангажа от заданного направления могут выходить за допустимый интервал, определяющий требуемую точность направления вектора тяги. Отработка изменений в программе ориентации и приведение углового положения РБ в заданную трубку точности требует определенного времени на переходные процессы. Периодически повторяющиеся скачки в программе ориентации приводят к необходимости соответствующих отклонений маршевого двигателя для создания управляющих моментов, и это приводит к дополнительным возмущениям в контурах угловой стабилизации.
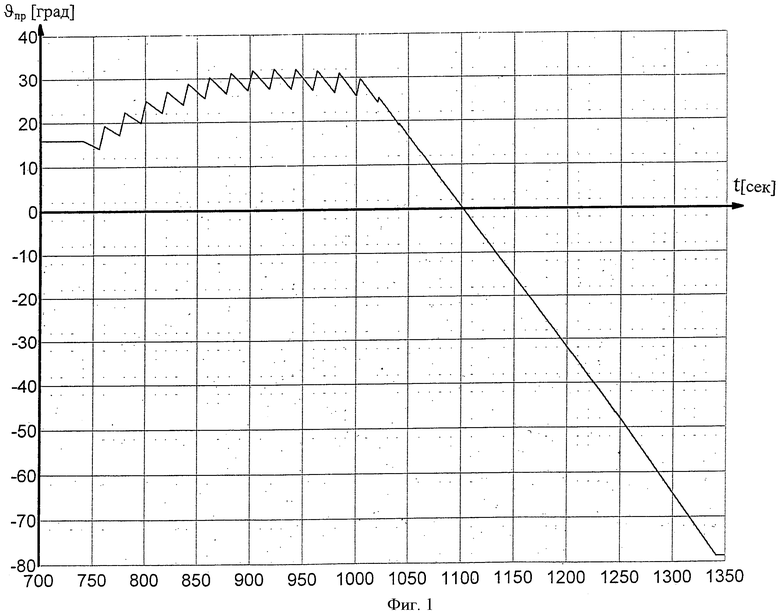
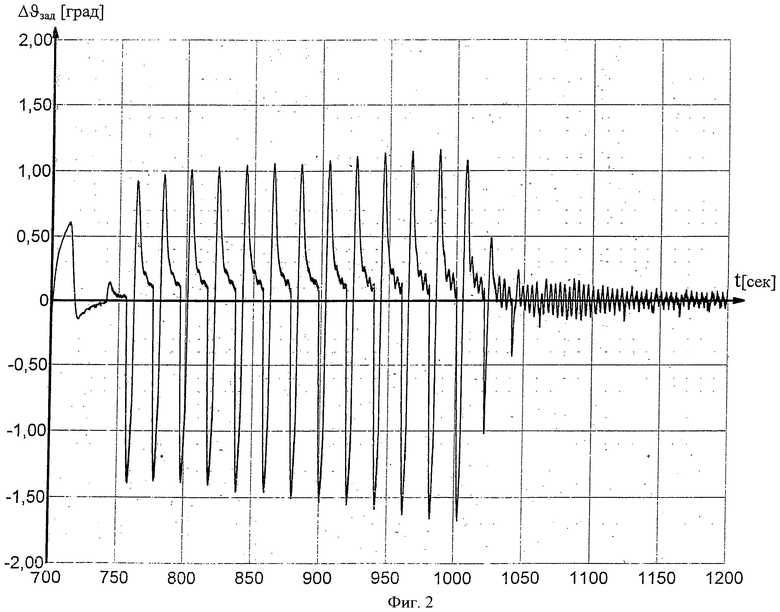
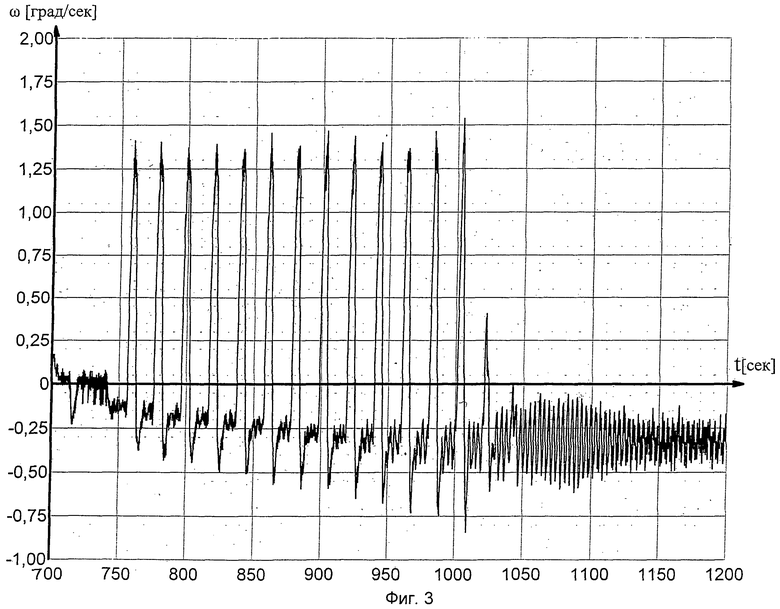
На фиг.1 приведен пример изменения программы ориентации по углу тангажа (Δϑпр) при известном способе коррекции ее параметров. При ограничении поправки по углу тангажа в пределах ±6 градусов происходит пилообразное изменение программы ориентации по углу тангажа в течение 250 сек (фиг.1) и из-за этого отклонения по углу тангажа от заданных значений (Δϑзад) достигают 1.7 град (фиг.2), превышая заданную трубку точности ±1 градус, а угловая скорость изменения угла тангажа (ω) доходит до 1.5 град/сек (фиг.3).
Техническим результатом изобретения является повышение точности угловой стабилизации РБ относительно заданной ориентации за счет снижение уровня возмущений, действующих на контур угловой стабилизации РБ.
Указанный технический результат достигается тем, что в известном способе коррекции параметров программы ориентации при терминальном управлении наведением РБ на заданную орбиту, заключающемся в том, что прогнозируют параметры движения РБ на момент отсечки маршевого двигателя, определяют по ним отклонения радиуса и радиальной скорости от их значений на заданной орбите, определяют чувствительность этих траекторных параметров к изменению параметров программы ориентации, формируют сигналы коррекции управления по углу тангажа и угловой скорости тангажа, ограничивают сигнал коррекции по углу тангажа на заданном уровне, изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально сформированному значению сигнала коррекции по углу тангажа, суммируют эти поправки с программными значениями угла тангажа и угловой скорости, вводят согласно изобретению в указанную программу ориентации в качестве дополнительного параметра угловое ускорение тангажа, определяют чувствительность отклонений по радиусу и радиальной скорости к изменению углового ускорения, определяют по прогнозируемым отклонениям радиуса и радиальной скорости от их значений на заданной орбите корректирующие поправки по угловой скорости тангажа и угловому ускорению тангажа, ограничивают сигнал коррекции по угловой скорости тангажа на заданном уровне и изменяют сигнал коррекции по угловому ускорению тангажа пропорционально уровню ограничения сигнала коррекции по угловой скорости тангажа и обратно пропорционально сформированному значению сигнала коррекции по угловой скорости тангажа, суммируют эти поправки с программными значениями угловой скорости и углового ускорения тангажа, определяя тем самым новые значения параметров программы ориентации.
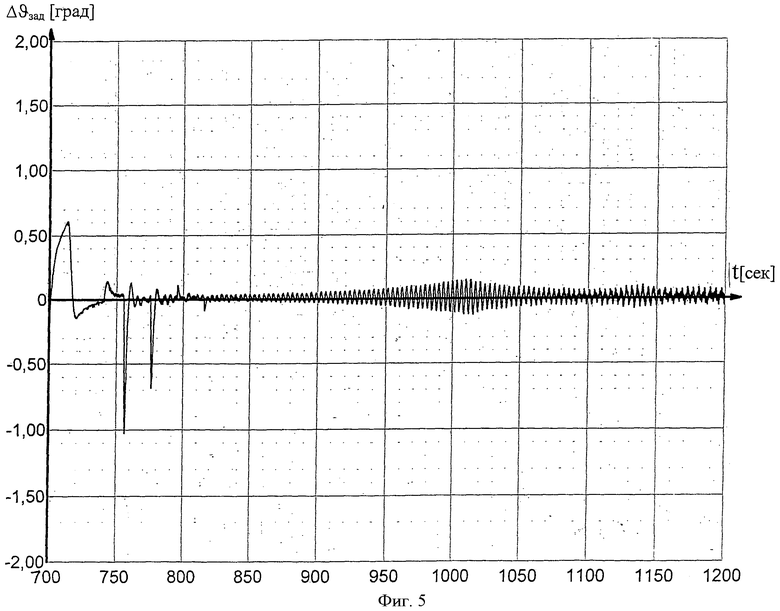
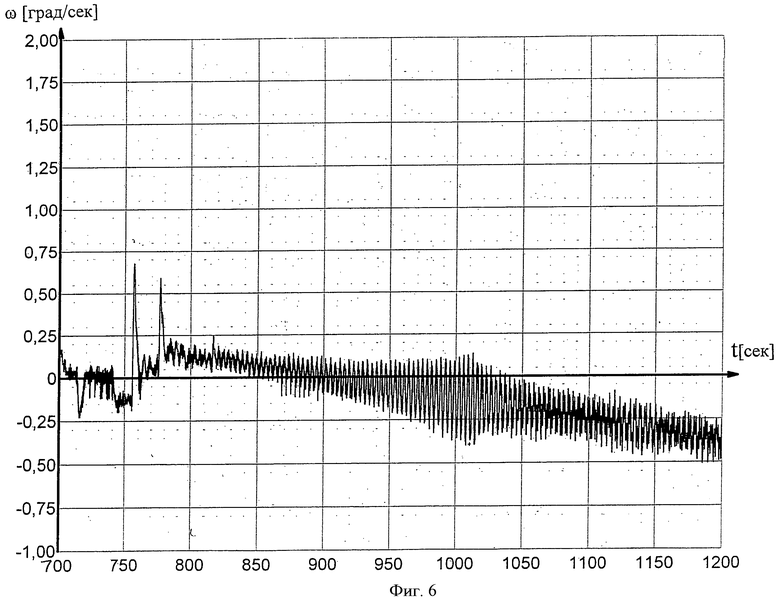
На фиг.1 представлена программа ориентации по углу тангажа (ϑпр) для известного способа формирования корректирующих поправок при ограничении сигнала коррекции по углу тангажа на уровне  градусов, на фиг.2 приведены соответствующие этой программе отклонения по углу тангажа от заданной ориентации (Δϑзад), а на фиг.3 - угловые скорости изменения угла тангажа (ω), на фиг.4 представлена программа ориентации по углу тангажа (ϑпр) для предлагаемого способа формирования корректирующих поправок, на фиг.5 приведены соответствующие этой программе отклонения по углу тангажа от заданной ориентации (Δϑзад), а на фиг.6 представлены угловые скорости изменения угла тангажа (ω).
градусов, на фиг.2 приведены соответствующие этой программе отклонения по углу тангажа от заданной ориентации (Δϑзад), а на фиг.3 - угловые скорости изменения угла тангажа (ω), на фиг.4 представлена программа ориентации по углу тангажа (ϑпр) для предлагаемого способа формирования корректирующих поправок, на фиг.5 приведены соответствующие этой программе отклонения по углу тангажа от заданной ориентации (Δϑзад), а на фиг.6 представлены угловые скорости изменения угла тангажа (ω).
Предложенный способ коррекции параметров программы ориентации при терминальном управлении наведением РБ на заданную орбиту реализуется следующим образом.
Для продольного движения в программу ориентации РБ вводят дополнительный параметр - угловое ускорение по углу тангажа 
 .
.
При этом изменение ускорения  , нормального к базовой траектории, при изменении угловой скорости тангажа и его углового ускорения описывается нелинейной по времени зависимостью
, нормального к базовой траектории, при изменении угловой скорости тангажа и его углового ускорения описывается нелинейной по времени зависимостью

в которой  - ускорение РБ от маршевого двигателя, определяемое по формуле
- ускорение РБ от маршевого двигателя, определяемое по формуле
 ,
,
где J - удельный импульс тяги маршевого двигателя;
τ - условное время сгорания массы РБ;
t - время, отсчитываемое от начала прогноза.
Производные изменения ускорения  по управляющим воздействиям
по управляющим воздействиям  и
и  имеют вид
имеют вид
 ,
,
 .
.
Интегрирование этих производных дает в прогнозируемой точке окончания маневра функции чувствительности по радиальной скорости  , а повторное интегрирование - по линейному отклонению от базовой траектории
, а повторное интегрирование - по линейному отклонению от базовой траектории 
 ,
,
 ,
,
 ,
,
 .
.
После интегрирования этих уравнений определяются следующие зависимости:

 ,
,
 ,
,
 ,
,

где Ls=ln[τ/(τ-ts)];
ts - время от момента определения поправок Δϑ,  до окончания маневра, то есть оставшееся время до прогнозируемого момента отсечки маршевого двигателя.
до окончания маневра, то есть оставшееся время до прогнозируемого момента отсечки маршевого двигателя.
Связь между отклонениями ΔV, ΔR и корректирующими поправками записывается в виде системы уравнений
 ,
,
 ,
,
из решения которой определяются искомые поправки
 ,
,
 ,
,
где  ,
,
 ,
,
 ,
,
Dk - определитель решаемой системы
 .
.
На каждом такте терминального управления после расчета корректирующих поправок происходит скачкообразное изменение параметров программы ориентации. Для уменьшения этих скачков сигнал коррекции управления по угловой скорости тангажа ограничивают на заданном уровне  и пропорционально этому изменению уменьшают сигнал коррекции по угловому ускорению
и пропорционально этому изменению уменьшают сигнал коррекции по угловому ускорению
 при
при 
На фиг.4 представлена программа ориентации по углу тангажа для предлагаемого способа формирования корректирующих поправок при ограничении  град/сек. Эта программа сформирована для тех же условий, что и программа по известному способу (фиг.1). При использовании предлагаемого способа программа ориентации не имеет скачков по углу тангажа, и это позволяет существенно улучшить процессы угловой стабилизации (фиг.5, 6). При этом отклонения по углу тангажа от заданного направления (фиг.5) уменьшились до значений ±0.15 град (примерно на порядок по сравнению с прототипом), а колебания по угловой скорости с отклонениями ±1 град/сек (в прототипе) сократились до ±0.25 град/сек.
град/сек. Эта программа сформирована для тех же условий, что и программа по известному способу (фиг.1). При использовании предлагаемого способа программа ориентации не имеет скачков по углу тангажа, и это позволяет существенно улучшить процессы угловой стабилизации (фиг.5, 6). При этом отклонения по углу тангажа от заданного направления (фиг.5) уменьшились до значений ±0.15 град (примерно на порядок по сравнению с прототипом), а колебания по угловой скорости с отклонениями ±1 град/сек (в прототипе) сократились до ±0.25 град/сек.
Источник информации
1. Патент РФ №2211786, 18.01.2002, B64G 1/24.
Изобретение относится к области терминального управления траекторным движением разгонных блоков, выводящих космические аппараты на заданную орбиту с помощью маршевого двигателя с нерегулируемой тягой. В способе прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя и определяют по ним отклонения радиуса и радиальной скорости от их значений на заданной орбите. Определяют чувствительность этих траекторных параметров к изменению параметров программы ориентации. Формируют сигналы коррекции управления по углу тангажа и угловой скорости тангажа и суммируют поправки с программными значениями угла тангажа и угловой скорости. Вводят в указанную программу ориентации в качестве дополнительного параметра угловое ускорение тангажа и определяют чувствительность отклонений по радиусу и радиальной скорости к изменению углового ускорения. Определяют по прогнозируемым отклонениям радиуса и радиальной скорости от их значений на заданной орбите корректирующие поправки по угловой скорости тангажа и угловому ускорению тангажа. Ограничивают сигнал коррекции по угловой скорости тангажа на заданном уровне и изменяют сигнал коррекции по угловому ускорению тангажа пропорционально уровню ограничения сигнала коррекции по угловой скорости тангажа и обратно пропорционально сформированному значению сигнала коррекции по угловой скорости тангажа. Суммируют эти поправки с программными значениями угловой скорости и углового ускорения тангажа, определяя тем самым новые значения параметров программы ориентации. Достигается снижение уровня возмущений, действующих на контур угловой стабилизации разгонного блока, и повышение точности угловой стабилизации разгонного блока относительно заданной ориентации. 6 ил.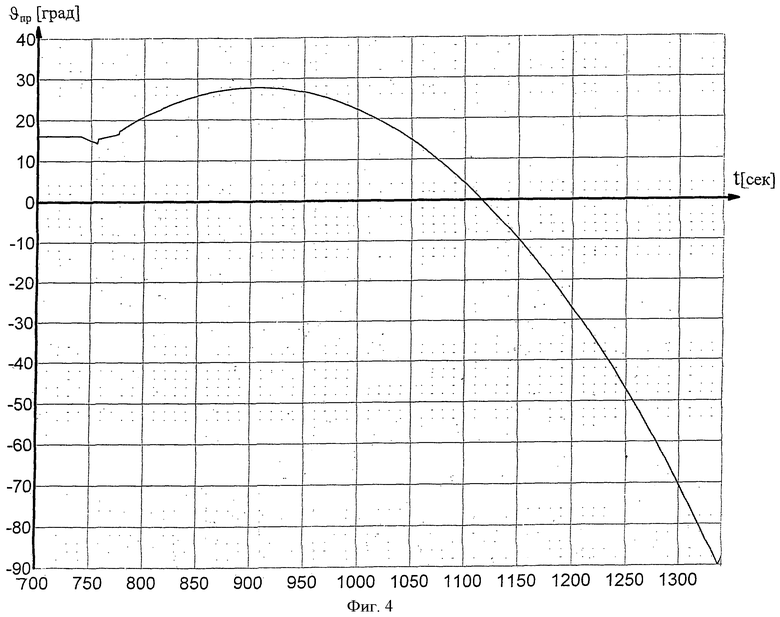
Способ коррекции параметров программы ориентации при терминальном управлении наведением разгонного блока на заданную орбиту, заключающийся в том, что прогнозируют параметры движения разгонного блока на момент отсечки маршевого двигателя, определяют по ним отклонения радиуса и радиальной скорости от их значений на заданной орбите, определяют чувствительность этих траекторных параметров к изменению параметров программы ориентации, формируют сигналы коррекции управления по углу тангажа и угловой скорости тангажа, ограничивают сигнал коррекции по углу тангажа на заданном уровне, изменяют сигнал коррекции по угловой скорости тангажа пропорционально уровню ограничения сигнала коррекции по углу тангажа и обратно пропорционально сформированному значению сигнала коррекции по углу тангажа, суммируют эти поправки с программными значениями угла тангажа и угловой скорости, отличающийся тем, что вводят в указанную программу ориентации в качестве дополнительного параметра угловое ускорение тангажа, определяют чувствительность отклонений по радиусу и радиальной скорости к изменению углового ускорения, определяют по прогнозируемым отклонениям радиуса и радиальной скорости от их значений на заданной орбите корректирующие поправки по угловой скорости тангажа и угловому ускорению тангажа, ограничивают сигнал коррекции по угловой скорости тангажа на заданном уровне и изменяют сигнал коррекции по угловому ускорению тангажа пропорционально уровню ограничения сигнала коррекции по угловой скорости тангажа и обратно пропорционально сформированному значению сигнала коррекции по угловой скорости тангажа, суммируют эти поправки с программными значениями угловой скорости и углового ускорения тангажа, определяя тем самым новые значения параметров программы ориентации.
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2211786C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2002 |
|
RU2223894C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2003 |
|
RU2254271C2 |
| US 6471161 B1, 29.10.2002. | |||

