Изобретение относится к гироскопии и может быть использовано в системах инерциального управления объектами. Прототипом изобретения является динамически настраиваемый гироскоп (ДНГ) [1], содержащий корпус, ротор и датчик угла, закрепленные во вращающейся герметичной ампуле, электропривод, высокоскоростные газодинамические опоры (ГДО), опорные поверхности которых выполнены в корпусе полусферическими, устройство передачи информации от датчиков к корпусу и устройство передачи энергии от корпуса, подвижные элементы выполнены в виде двух жестко связанных фланцев, каждый с аналогичной опорной поверхности корпуса рабочей поверхностью и внутренней полостью. Во внутренней полости первого фланца установлена герметичная ампула и преобразователь сигнала датчика угла в код, а во внутреннюю полость второго фланца установлены элементы электропривода.
Недостатком данного ДНГ является повышенное энергопотребление и снижение точности, обусловленное перегревом элементов гироскопа.
Целью изобретения является снижение энергопотребления и обеспечение устойчивости ДНГ при вибровоздействии.
Поставленная цель достигается тем, что шипы газодинамической опоры размещены на консоли по обе стороны вращающейся части, содержащей детали ДНГ, а подшипники ГДО жестко закреплены в корпусе, причем жесткость консоли связана с параметрами газодинамической опоры соотношением:

где  - безразмерная угловая жесткость консоли,
- безразмерная угловая жесткость консоли,
Γ - угловая жесткость консольной подвески,
Рa - давление окружающей среды,
R - радиус сферической ГДО,
L - длина ГДО,
l - длина консоли,
 - безразмерный момент инерции,
- безразмерный момент инерции,
Jу - поперечный момент инерции консоли и шипа,
μ - динамическая вязкость газа,
h0 - зазор в ГДО,
δ - глубина спиральной канавки,
Re - символ действительной части комплексного числа,


 - безразмерная глубина спиральной канавки,
- безразмерная глубина спиральной канавки,  - безразмерная ширина уплотнительного пояска ГДО, ς1 - ширина уплотнительного пояска ГДО,
- безразмерная ширина уплотнительного пояска ГДО, ς1 - ширина уплотнительного пояска ГДО,

 - безразмерный параметр сжимаемости,
- безразмерный параметр сжимаемости,
Ω - угловая скорость вращения подвижной части,
α - угол захода спиральной канавки,
 - безразмерная длина консоли,
- безразмерная длина консоли,
 - безразмерный массовый параметр,
- безразмерный массовый параметр,
 , M - масса подвижной части гироскопа,
, M - масса подвижной части гироскопа,


th - символ гиперболического тангенса.
На фиг.1 представлена конструкция ДНГ. Гироскоп содержит ротор 1, первую ампулу 2, емкостные датчики угла 3 и 4, вторую ампулу 5, автогенераторы 6 и 7, смеситель 8, выпрямитель 9, первичную обмотку первого трансформатора 10, вторичную обмотку второго трансформатора 11, вторичную обмотку первого трансформатора 12, первичную обмотку второго трансформатора 13, ротор приводного двигателя 15, статор приводного двигателя 16, постоянные магниты 14 и 17, генератор опорных импульсов 18. Статор приводного двигателя 16, генератор опорных импульсов 18, вторичная обмотка 12 и первичная обмотка 13 установлены на неподвижном корпусе 26.
Для достижения поставленной цели - снижения энергопотребления и, как следствие, уменьшения температуры нагрева элементов гироскопа ампула 2 с установленными внутри нее ротором 1 и емкостными датчиками 3 и 4, ампула 5 с установленными внутри нее автогенераторами 6 и 7, смесителем 8 и выпрямителем 9, первичная обмотка первого трансформатора 10 и вторичная обмотка второго трансформатора 11, постоянные магниты 14 и 17, ротор приводного двигателя 15 размещены на подвижной части 25, по обе стороны которой установлены на консолях 19 и 20 чашки 21 и 22, которые являются шипами газодинамических опор (ГДО). Полусферы 23 и 24, профилированные спиральными канавками, жестко установлены в корпусе 26 (подшипники ГДО). При этом уменьшается радиус ГДО и, соответственно, момент сопротивления, который, согласно [2], пропорционален четвертой степени радиуса. Однако при консольном размещении шипа ГДО относительно вращающейся части возможны неустойчивые режимы, которые при вибровоздействии на гироскоп приводят к выходу из строя ГДО. Поэтому для снижения энергопотребления и обеспечения устойчивости при вибровоздействии на гироскоп следует помимо консольного размещения шипов ГДО относительно вращающейся части добиться устойчивости ГДО при нежесткой подвеске ее элементов. Для оценки устойчивости ДНГ запишем уравнения движения подвижной части, воспользовавшись схемой фиг.2.
Рассмотрим фиг.2, где а) - схема подвески шипа и установки подшипника ГДО: консоль 19 с чашкой 21, закрепленные на подвижной части 25, полусфера 23, профилированная спиральными канавками, выполненными по локсодромии (подшипник ГДО), жестко закреплена в корпусе 26,  - упругий момент консоли, (ϕ - угол поворота консоли, Jу - поперечный момент инерции консоли,
- упругий момент консоли, (ϕ - угол поворота консоли, Jу - поперечный момент инерции консоли,  - сила реакции смазочного слоя ГДО, б) - схема ГДО, где α1 - ширина канавки.
- сила реакции смазочного слоя ГДО, б) - схема ГДО, где α1 - ширина канавки.
Уравнения движения системы, подвижная часть и консоль могут быть записаны в виде:

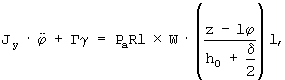
где m=M/2, M - масса подвижной части,
z - поступательное смещение деталей ГДО,
l - длина консоли,
ϕ - угол поворота консоли,
Pa - давление окружающей среды,
R - радиус сферической ГДО,
L - длина ГДО,
h0 - зазор в ГДО,
δ - глубина спиральной канавки,
Jу - поперечный момент инерции консоли,
Г - угловая жесткость консольной подвески.
Обозначим:
t - время,  , τ - безразмерное время,
, τ - безразмерное время,
 - относительное поступательное смещение деталей ГДО,
- относительное поступательное смещение деталей ГДО,
W - безразмерная сила реакции смазочного слоя ГДО,
 - безразмерный момент инерции.
- безразмерный момент инерции.
С учетом принятых обозначений и преобразования по Лапласу уравнения (1) примут вид:


где S - параметр преобразования Лапласа
 - безразмерная угловая жесткость консоли
- безразмерная угловая жесткость консоли
Согласно [2], [3],


 ζ1 - ширина уплотнительного пояска ГДО,
ζ1 - ширина уплотнительного пояска ГДО,





 - безразмерный параметр сжимаемости,
- безразмерный параметр сжимаемости,
th - символ гиперболического тангенса;
sh - символ гиперболического синуса;
ch - символ гиперболического косинуса;
 - мнимая единица; π=3,1415926...
- мнимая единица; π=3,1415926...

Характеристическое уравнение системы (2):
При S=jω, где  ν - частота колебаний подвижной части.
ν - частота колебаний подвижной части.
Уравнение (4) запишется в виде:

Из выражения (5) находим γ:

где W(jω)=ReW(jω)+jJmW(jω) - безразмерная сила реакции смазочного слоя ГДО, определяемая выражением (3) при S=jω, Re - символ действительной части комплексного числа, Jm - символ мнимой части комплексного числа.
Определим область устойчивости по параметру γ, используя метод D-разбиений, для чего построим функцию D=Reγ+jJmγ, где


Функцию D определим для следующих констант:
Jy=5,5·10-9 кгм, m=0,09 кг, l≈8·10-3 м, μ=1,86·10-10 кГ×с/см2, R≈8,1·10-3 м, L=8,83·10-3 м, ζ1=3,5·10-3 м, h0=2,8·10-6 м, δ=5·10-6 м, Ω=1132 рад/с в диапазоне частот -∞≤w≤∞. График D-разбиения приводится на фиг.3. Претендентом на область устойчивости является область Reγ≥γкр. Для подтверждения того, что претендент действительно область устойчивости, оценим устойчивость ГДО при γ=γкр. Характеристическое уравнение разомкнутой системы имеет вид:

Обозначим функцию:

Постоим годограф функции (10) при S=jω, при этом:


График годографа функции 
представлен на фиг.4. График фиг.4 не охватывает точку минус 1. Это означает, согласно критерию устойчивости Найквиста, что ГДО устойчива при γ=γкр, и область изменения безразмерной жесткости Reγ≥γкр является областью устойчивости ГДО.
Так как значение Reγ=γкр достигается при ω=Λ0, то условие устойчивости ДНГ примет вид:

Проверка справедливости критерия (14) проводилась на образце, безразмерная угловая жесткость консоли у которого γ0=0,46·103, при испытаниях на виброудар при перегрузке A=4 g произошло касание шипа и подшипника ГДО. Согласно графика фиг.3 значение γ0=0,46·103 лежит вне области устойчивости, γ0<Reγкр, (Reγкр=3,9·103). После заневоливания крышки, на которой установлена консоль с чашкой ГДО винтами, безразмерная угловая жесткость консоли составила γ1=4,38·103. Данное значение безразмерной жесткости находится внутри области устойчивости γ1>Reγкр. При испытаниях на виброудар ГДО сохранила работоспособность при воздействии виброускорения A=40 g, что и доказывает справедливость критерия (14). Следовательно, размещение элементов динамически настраиваемого гироскопа: ампулы с установленными внутри ее ротором и емкостными датчиками, а также ампулы с установленными внутри ее автогенераторами, смесителем, обмотки трансформаторов, постоянных магнитов и ротора приводного двигателя на подвижной части, а шипов ГДО - на консолях по обе стороны подвижной части гироскопа, причем безразмерная угловая жесткость консоли при этом связана с параметрами ГДО соотношением (14), позволяет обеспечить снижение энергопотребления и устойчивость динамически настраиваемого гироскопа в условиях вибровоздействия.
Источники информации
1. Белугин В.Б., Гулевич В.П., Нестеров В.В. Динамически настраиваемый гироскоп Патент РФ 2101679, Кл. 6 G 01 С 19/56.
2. Никитин Е.А., Шестов С.А., Матвеев В.А. Гироскопические системы, ч.1, "Элементы гироскопических приборов", М., Высшая школа, 1988, 431 с.
3. Дроздович В.Н. "Газодинамические подшипники", Л. Машиностроение, Ленинградское отделение, 1976, 207 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| СПОСОБ ДИАГНОСТИКИ РОТОРА ГИРОСКОПА НА ГАЗОДИНАМИЧЕСКОЙ ОПОРЕ | 1984 |
|
SU1840738A1 |
| СПОСОБ КОНТРОЛЯ ГАЗОДИНАМИЧЕСКОЙ ОПОРЫ ГИРОСКОПА | 1985 |
|
SU1840740A1 |
| ОПОРНО-ПРИВОДНОЕ УСТРОЙСТВО | 1999 |
|
RU2193703C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СФЕРИЧЕСКОЙ ГАЗОДИНАМИЧЕСКОЙ ОПОРЫ ГИРОСКОПА | 1985 |
|
SU1840742A1 |
| СПОСОБ УСТРАНЕНИЯ ТРЕНДА В МОДУЛЯЦИОННОМ ГИРОСКОПЕ | 2003 |
|
RU2262074C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОПОРЫ НА ГАЗОВОЙ СМАЗКЕ | 1986 |
|
SU1839830A2 |
| ГАЗОДИНАМИЧЕСКАЯ ОПОРА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2239734C1 |


Изобретение относится к гироскопам и может быть использовано в системах инерциального управления объектами. В основу работы гироскопа положен модуляционный принцип, с подвесом вращающейся части на газодинамических опорах (ГДО), шипы которых установлены на консоли по обе стороны вращающейся части. Опорные поверхности ГДО профилированы спиральными канавками, по локсодромии. Угловая жесткость связана с параметрами опоры соотношением, обеспечивающим устойчивость системы консоль - ГДО. При этом достигается снижение энергопотребления и обеспечивается работоспособность гироскопа в условиях вибровоздействия. 4 ил.
Динамически настраиваемый гироскоп, содержащий первую ампулу, в которой установлены ротор и два емкостных датчика угла, вторую ампулу, в которой установлены автогенераторы, смеситель, выпрямитель, а также постоянные магниты, размещенные на подвижной части, два трансформатора, в которых вторичная обмотка второго трансформатора и первичная обмотка первого трансформатора установлены на подвижной части, приводной двигатель, ротор которого размещен на подвижной части, а статор на неподвижном корпусе, генератор опорных импульсов, размещенный на неподвижном корпусе, и высокоскоростные газодинамические опоры (ГДО), отличающийся тем, что шипы газодинамических опор на консолях размещены по обе стороны подвижной части, подшипники газодинамических опор жестко связаны с неподвижным корпусом, и угловая жесткость каждой консоли связана с параметрами газодинамической опоры следующим соотношением:
где  - безразмерная угловая жесткость консоли;
- безразмерная угловая жесткость консоли;
Г - угловая жесткость консольной подвески;
Pa - давление окружающей среды;
R - радиус ГДО;
L - длина ГДО;
l - длина консоли;
 - безразмерный момент инерции;
- безразмерный момент инерции;
Jу - поперечный момент инерции консоли и шипа;
μ - динамическая вязкость газа;
h0 - зазор в ГДО;
δ - глубина спиральной канавки на поверхности газодинамической опоры;
 - безразмерный параметр сжимаемости;
- безразмерный параметр сжимаемости;
Ω - угловая скорость вращения подвижной части;


 - безразмерная глубина спиральной канавки;
- безразмерная глубина спиральной канавки;
 - безразмерная ширина уплотнительного пояска ГДО;
- безразмерная ширина уплотнительного пояска ГДО;
ς1 - ширина уплотнительного пояска ГДО;

α - угол захода спиральной канавки;
 - безразмерная длина консоли;
- безразмерная длина консоли;

 - безразмерный массовый параметр;
- безразмерный массовый параметр;
 , M - масса подвижной части гироскопа;
, M - масса подвижной части гироскопа;

| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| US 4357837 A, 09.11.1982 | |||
| US 3747417 А, 24.07.1973. | |||

