(54) ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ
РЕГУЛЯТОР
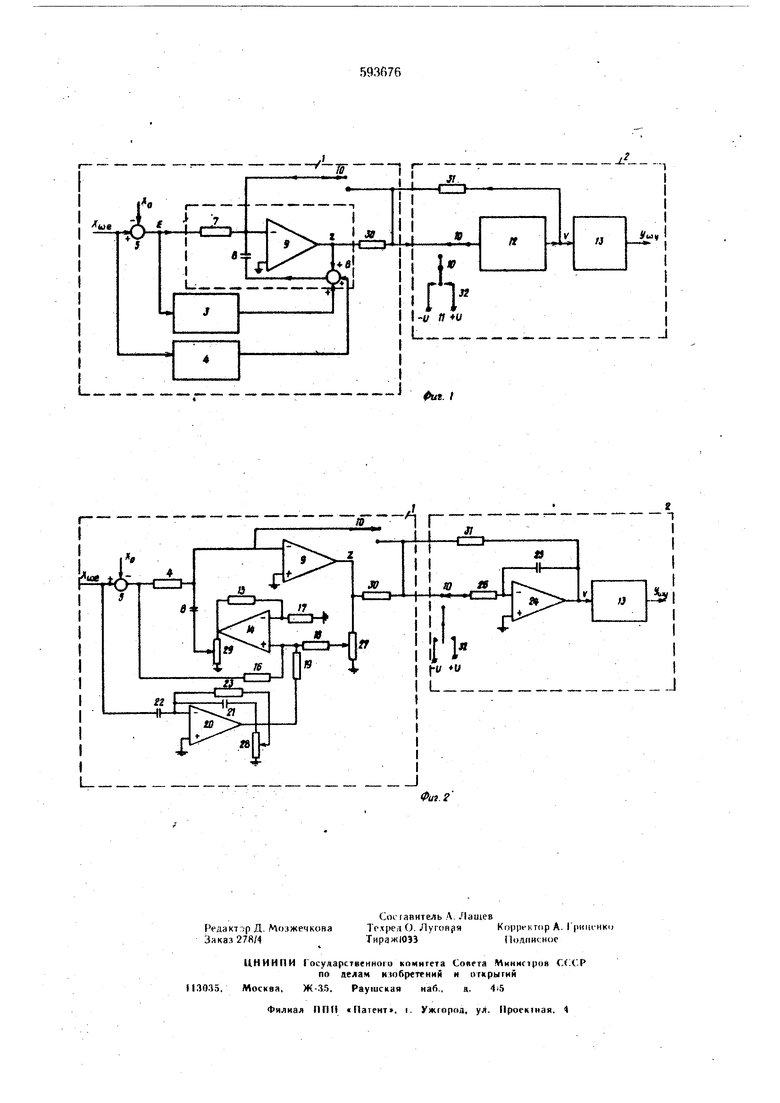
На фиг. 1 изображена структурная схема регулятора; на фиг. 2 представлен пример технического осуществления регулятора.
Регулятор состоит из пропорционально-дифференциального (ПИЛ) блока I и блока 2 ручного управления.
Блок (ПИД) состоит из пропорционального блока 3. дифференцирующего блока 4, первого сумматора 5, второго сумматора 6, первого элемента 7 обратной связи , второго элемента 8 обратной связи, усилителя 9.
Блок 2 ручного управления состоит из переключателя 10, источника И постоянного напряжения интегрирующего блока 12, исполнительного элемента 13,
Второй сумматор 6 состоит из усилителя 14 и резисторов 15-19.
Дифференцирующий блок 4 состоит из усилителя 20, конденсаторов 21 и 22 и резистора 23 в качестве элементов обратной-связи.
Интегрирующий блок 12 состоит из усилителя 24, конденсатора 25 и резистора 26.
Потенциометры 27, 28, 29 служат для устйновки динамических параметров регулятора.
В состав регулятора входят третий и четвертый элементы обратной сВязи - резисторы 30, 31 и кнопка 32 ручного управления.
Устройство следующим образом.
Входной сигнал,регулятора Х- еПодается на дифференцирующий 4 и на сумматор 5, где он сравнивается с задан1йым значением Хс. Ошибка регулйровандя Е пйдйется на пропорциональный блок 3 и на первйй элемент обратной связн 7..
Выходной сигнал усилителя 9, являющийся выходным сигналом ПИД блока 1, подается через резистор 30 на вход лока 2 ручного управления и на сумматор 6, на вход которого кроме выходного сигнала г подается тзк,же сигнал с дифференцирующего блока 4 и с пропорционального блока 3. Выходной сигнал V интегр 1рующего блока 12, пропорциональный выходному сигналу Z ПИД блока I, преобразуется в выходных цепях исполнительного элемента 13 в нормализованный выходной сигнал регулятора У,.
В ручном режиме управления статическая обратная свя-зь, осуществленная резисторами 30 и 31, через переключатель 10 отключается от входа интегрирующего блока 12.
Ручное управление осуществляется посредством кнопки 32 ручного управления, с помощью которой ня вход интегрирующего блока Г2 подается постоянный сигнал У соответствук щего знака, вызывающий изменение значения выходного сигнала регулятора.
Для обеспечения перехода без возмущений с режима ручного управления на автоматический необходимо, чтобы выходной сигнал2 ПИД блока f во время ручного управления был равен выходному сигналу V интегрнрующего блока 12. Это достигается благодаря охвату усилителя 14 сумматора 6. статической обратной связь о с помощью тех же резисторов 30 и 31.
Переход без возмущений с автоматического режима управления на ручной осуществляется благодаря применению при ручном управлении интегрирующего блока 12, который «затюмннает последнее значение напряжения автоматического управления перед переходом на ручное управление.
Регулятор позволяет простым способом без возмущений и без дополнительных операций переходить с автоматического управления на ручное и обратно и осуществляет автоматическое переключение одного или нескольких регуляторов, что особенно важно.для того, чтобы не допускать отсутствия напряжения питания в схемах управления цифровой мащиной.
Формула изобретения
Пропорционально-интегрально-дифференциальный регулятор, содержащий интегрирующий блок, соединенный со входом исполнительного элемента, переключатель, источник постоянного напряжения, первый сумматор, вход которого соединен с дифференцирующим блоком,
а выход - со входом пропорционального блока и первым элементом обратной связи, соединенным с усилителем и через второй элемент обратной связи - с выходом второго сумматора, входы которого соединены с выходами пропорционального и дифференцирующего блоков и усилителя, отличающийся тем, что, с целью повыщения надежности регулятора, он содержит последовательно соединенные третий и четвертый элементы обратной связи, выход усилителя через третий элемент обратной связи и переключатель подключен к входам усилителя и
интегрирующего блока, а через четвертый элемент обратной связи - к выходу интегрирующего блока, связанного с источником постоянного напряжения.
Источники информации, принятые во вннмание при экспертизе:
1. Баранчук Е. И. «Проектирование и настройка электронных регуляторов, Мащгиз, 1963.
2. Авторское свидетельство СССР № 298923, кл. G 05 В 11/00, 1966.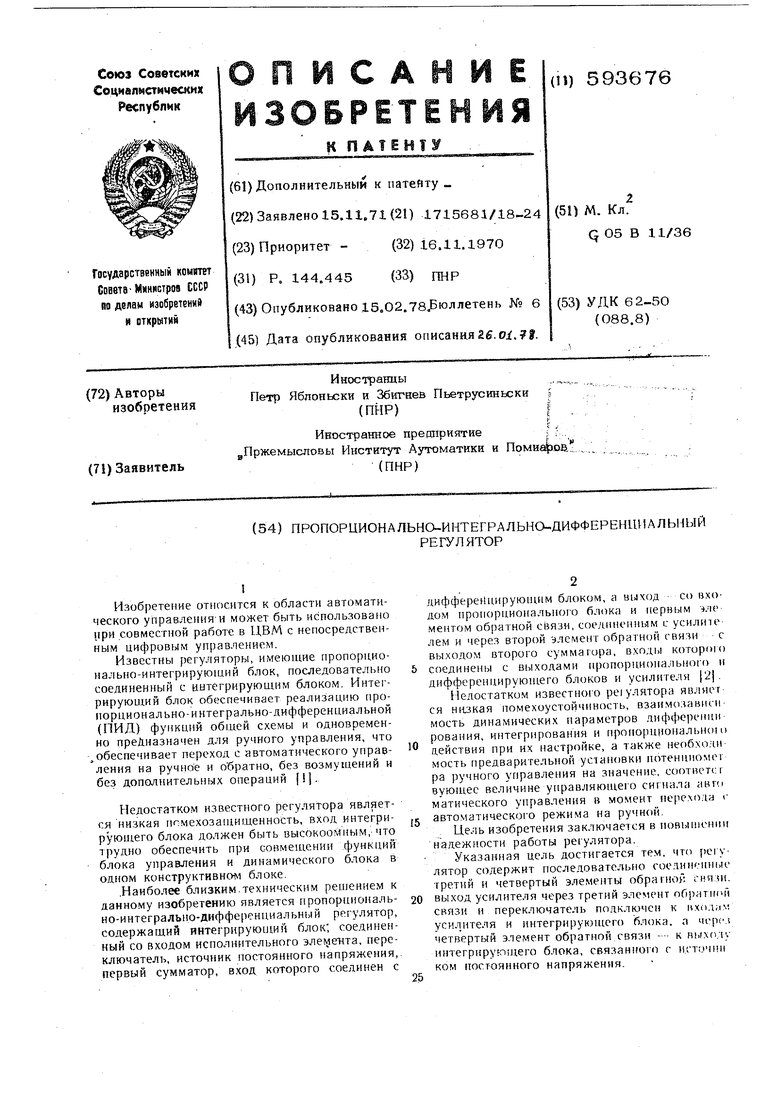
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПО ПИД-ЗАКОНУ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510956C2 |
| АВТОМАТИЧЕСКИЙ ЭЛЕКТРИЧЕСКИЙ РЕГУЛЯТОР | 1971 |
|
SU298923A1 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
| УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ДЛЯ РЕГУЛЯТОРА СКОРОСТИ ГИДРОТУРБИНЫ | 2005 |
|
RU2292483C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| БЛОК РУЧНОГО РЕЗЕРВИРОВАНИЯ | 2004 |
|
RU2282882C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫХОДНЫМ ДАВЛЕНИЕМ РАБОЧЕЙ ЖИДКОСТИ НАСОСНОЙ СТАНЦИИ И СТАБИЛИЗАЦИИ ЭТОГО ДАВЛЕНИЯ И НАСОСНАЯ СТАНЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2003 |
|
RU2251025C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |