Устройство относится к области судовождения, в частности к системам автоматического управления продольным движением судна.
Известно устройство управления движением судна (а.с. СССР 979204), содержащее датчик и задатчик направления движением, датчик угла перекладки руля, датчик угловой скорости судна, выходы которого подключены через суммирующий усилитель к рулевому приводу.
Это устройство управления движения судна (авторулевой) имеет следующие недостатки:
- перегружает рулевой привод при появлении волнения;
- низкая точность управления при движении судна по заданному курсу при боковом ветре и волнении.
Наиболее близким к заявленному является устройство управления движением судна (патент РФ 2150409, 10.06.2000), содержащее датчик отклонения руля, датчик угловой скорости судна, задатчик путевого угла, приемо-индикатор спутниковых навигационных систем, блок умножения, сумматор и блок оценки состояния судна, содержащий три интегратора, три сумматора.
В прототипе для осуществления автоматического управления используется линейный стационарный закон управления. Для уменьшения влияния погрешностей измерений и внешних возмущающих факторов на работу контура управления в законе управления используют оценки переменных состояния, а именно оценки отклонения путевого угла от заданного, угловой скорости судна в горизонтальной плоскости, бокового отклонения судна в горизонтальной плоскости и непосредственно измеренный угол перекладки руля. Указанные оценки формируются с помощью блока оценки состояния судна. В этом блоке используются настраиваемые коэффициенты К3, К4, К5, которые выбираются из условия устойчивости работы блока оценки состояния судна и нахождения скорости сходимости оценок к истинным значениям оцениваемых параметров в допустимом диапазоне. Слишком большая скорость сходимости приведет к прохождению высокочастотных возмущений через блок оценки состояния судна, а слишком малая скорость сходимости может привести к нарушению устойчивости работы контура управления. Для настраиваемых коэффициентов К3, К4, K5 неизвестен способ прямого нахождения этих коэффициентов по заданным собственным числам фильтра. Поэтому на практике коэффициенты К3, K4, К5 могут быть найдены методом подбора на испытаниях судна с установленным авторулевым или с помощью итерационной процедуры на компьютере с использованием математической модели движения судна. Итерационный процесс подбора коэффициентов К3, К4, К5 приведет к использованию на практике неоптимальных значений этих коэффициентов и к понижению по сравнению с оптимальными значениями таких эксплуатационных показателей авторулевого, как точность удержания на заданной траектории и загрузка привода руля при сильном волнении.
Известное устройство обладает невысокими эксплуатационными свойствами из-за недостаточной точности регулирования.
Предлагаемое устройство вырабатывает оценку угла дрейфа, которая не измеряется при обычном составе датчиков на судне из-за сложности такого устройства. Технический результат, достигаемый при использовании изобретения, заключается в повышении точности работы контура управления благодаря введению дополнительного параметра в закон управления: оценки угла дрейфа.
Указанный технический результат достигается тем, что в устройстве управления движением судна, которое содержит датчик угла перекладки руля, датчик угловой скорости поворота судна, задатчик путевого угла, рулевое устройство судна, механически связанное с датчиком угла перекладки руля, приемник спутниковых навигационных систем с антенной, механически связанной с корпусом судна, автоматический регулятор путевого угла, состоящий из блока оценки состояния судна и сумматора, причем выход датчика угловой скорости поворота судна соединен с первым входом автоматического регулятора путевого угла, со вторым входом которого соединен выход датчика угла перекладки руля, три выхода блока оценки состояния судна соединены с тремя входами сумматора, выход которого является выходом автоматического регулятора путевого угла и соединен с приводом рулевого устройства судна, блок оценки состояния судна содержит три интегратора, выходы которых являются тремя выходами блока оценки состояния судна, согласно изобретению автоматический регулятор путевого угла дополнительно содержит вычислитель бокового отклонения судна от заданной траектории, первый вход которого является третьим входом автоматического регулятора путевого угла, который соединен с первым выходом приемника спутниковых навигационных систем с антенной, а второй вход вместе с первым входом блока оценки состояния судна и пятым входом сумматора является четвертым входом блока автоматического регулятора путевого угла, который соединен с выходом задатчика путевого угла, блок оценки состояния судна содержит четыре сумматора, четыре умножителя и четвертый интегратор, выход которого является четвертым выходом блока оценки состояния судна и соединен с четвертым входом сумматора автоматического регулятора путевого угла, первый вход первого сумматора является первым входом блока оценки состояния судна, его второй вход соединен с выходом первого интегратора и первым входом второго сумматора, второй вход которого является вторым входом блока оценки состояния судна и пятым входом блока автоматического регулятора путевого угла, который соединен со вторым выходом приемника спутниковых навигационных систем, второй вход третьего сумматора является третьим выходом блока оценки состояния судна и первым входом блока автоматического регулятора путевого угла, первый вход третьего сумматора соединен с выходом второго интегратора, первым входом первого и третьего интеграторов и первым входом первого умножителя, второй вход которого соединен с первым входом второго, третьего и четвертого умножителей, является четвертым входом блока оценки состояния судна и шестым входом блока автоматического регулятора путевого угла и соединен с третьим выходом приемника спутниковых навигационных систем, второй вход четвертого умножителя является пятым входом блока оценки состояния судна и вместе с шестым входом сумматора автоматического регулятора путевого угла образует второй вход блока автоматического регулятора путевого угла, второй вход четвертого сумматора является шестым входом блока оценки состояния судна и соединен с выходом вычислителя бокового отклонения судна от заданной траектории, его первый вход соединен с выходом четвертого интегратора, а выход соединен с третьим входом четвертого интегратора и четвертым входом первого, второго и третьего интеграторов, второй вход второго умножителя соединен со вторым входом первого и третьего интеграторов и выходом третьего интегратора, выход четвертого умножителя соединен со вторым входом третьего умножителя и третьим входом первого и третьего интеграторов, выходы первого, второго и третьего сумматоров соединены с первым и вторым входом четвертого интегратора и пятым входом первого интегратора соответственно, выходы первого, второго и третьего умножителей соединены с первым, вторым и третьим входами второго интегратора соответственно.
На фиг.1 представлена структурная схема устройства управления движением судна, на фиг.2 - схема блока оценки состояния судна.
Устройство содержит задатчик путевого угла 1, приемник спутниковых навигационных систем (СНС) с антенной 2, датчик угловой скорости поворота судна 3, датчик угла перекладки руля 4, привод рулевого устройства 5, автоматический регулятор путевого угла 6, корпус судна 7, с которым механически связан приемник СНС с антенной 2, рулевое устройство судна 8, механически связанное с датчиком угла перекладки руля 4. Выходы задатчика путевого угла, датчиков угловой скорости поворота судна и угла перекладки руля и выходы приемника СНС с антенной соединены с соответствующими входами автоматического регулятора путевого угла. Автоматический регулятор путевого угла состоит из вычислителя бокового отклонения судна от заданной траектории 9, выходом соединенного с блоком оценки состояния судна 10, и сумматора 11. Четыре выхода блока оценки состояния судна соединены с входами сумматора 11, выход которого является выходом автоматического регулятора путевого угла, который соединен с приводом рулевого устройства. Один вход вычислителя 9 соединен с первым выходом приемника СНС с антенной 2, а другой объединен с одним из входов блока оценки состояния судна и сумматора, образует вход автоматического регулятора путевого угла, который соединен с выходом задатчика путевого угла.
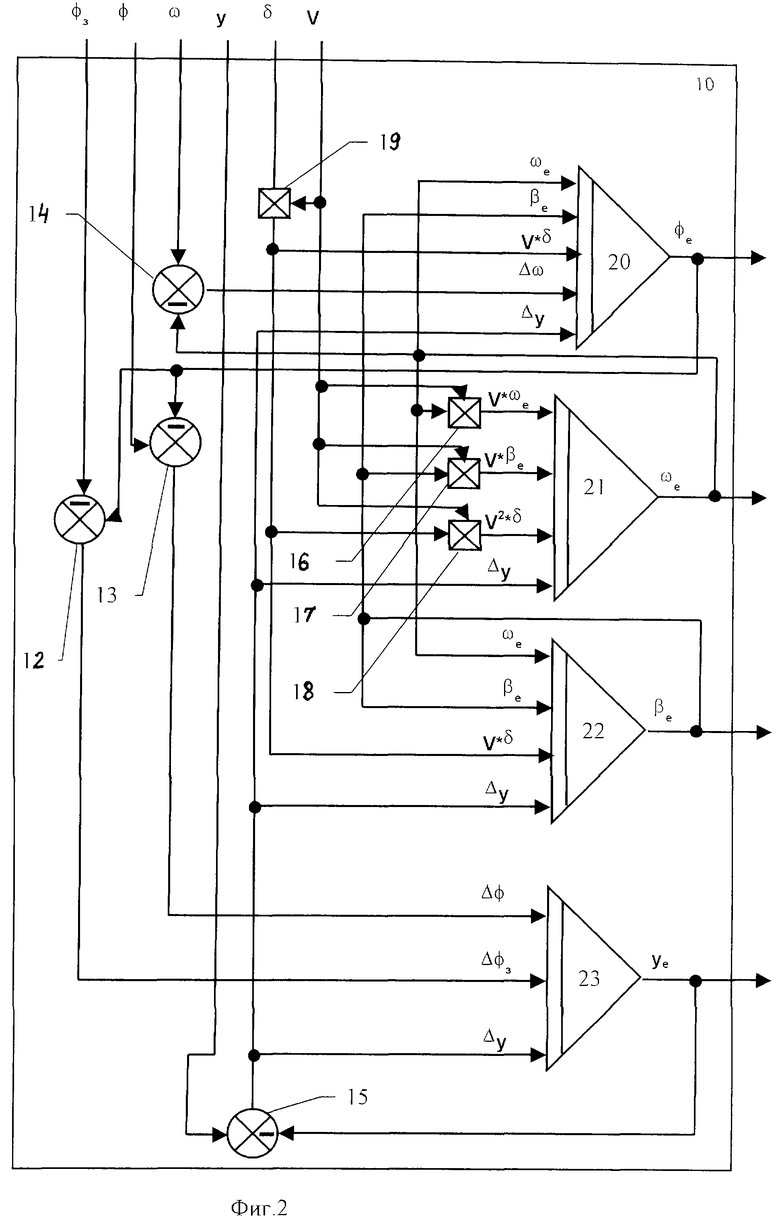
Блок оценки состояния судна 10 состоит из сумматоров 12, 13, 14, 15, умножителей 16, 17, 18, 19 и интеграторов 20, 21, 22, 23.
Один из входов каждого из сумматоров 12, 13, 14, 15 является входом блока оценки состояния судна. Указанные входы соединены соответственно с выходами задатчика путевого угла, приемника СНС с антенной, датчика угловой скорости поворота судна и вычислителя бокового отклонения судна от заданной траектории. Оба входа умножителя 19 являются входами блока оценки состояния судна, которые соединены с выходами датчика угла перекладки руля и приемника СНС. Другой вход сумматора 14 соединен с выходом интегратора 21, и входами интеграторов 20, 22 и умножителя 16. Другой вход сумматора 13 соединен с другим входом сумматора 12, и выходом интегратора 20. Другой вход сумматора 15 соединен с выходом интегратора 23. Выходы сумматоров 14-12 соединены соответственно с одним из входов интеграторов 20, 23, а выход сумматора 15 соединен с входами интеграторов 20-23. Вход умножителя 15, соединенный с третьим выходом приемника СНС с антенной, соединен также с входами умножителей 16-18, его выход - с входом интеграторов 20, 22 и умножителя 18. Вход умножителя 17 соединен с входом интеграторов 20 и 22 и выходом интегратора 22. Выходы умножителей 16-18 соединены с входами интегратора 21, а выходы всех интеграторов 20-23 являются выходами блока оценки состояния судна.
Возможен вариант реализации предложенной аппаратуры на элементах цифровой техники.
Устройство работает следующим образом.
Требуемое направление движения судна (φз) задается задатчиком путевого угла 1 и сигнал, соответствующий этому направлению передается в блок оценки состояния судна 10, сумматор 11 и вычислитель бокового отклонения судна от заданной траектории 9. Приемник СНС 2 вырабатывает приблизительно один раз в секунду сигнал, пропорциональный значению путевого угла (φ), абсолютной величине путевой скорости (V) и координатам судна: широте и долготе (Ш, Д). Значение бокового отклонения судна от заданной траектории (у) вычисляется вычислителем бокового отклонения судна от заданной траектории 9. Значения этих параметров поступают в блок оценки состояния судна 10. Датчик угловой скорости 3 измеряет угловую скорость поворота корпуса судна в горизонтальной плоскости (ω) и передает ее значение в блок оценки состояния судна 10. Датчик угла перекладки руля 4 измеряет текущее отклонение рулевого устройства от нейтрального положения (δ) и передает его значение в блок оценки состояния судна 10 и сумматор 11. Блок оценки состояния судна 10 на основе полученных данных и заданной модели движения судна вырабатывает оценки путевого угла (φe), угловой скорости судна в горизонтальной плоскости (ωe), угла дрейфа (βe), бокового отклонения судна (уе) и эти данные передаются в сумматор 11. Сумматор 8 формирует сигнал управления пропорциональный скорости перекладки руля  и этот сигнал поступает в привод рулевого устройства.
и этот сигнал поступает в привод рулевого устройства.
Оценки параметров движения (φe,ωe,βe,γe), вырабатываемые блоком оценки состояния судна 10, составляют полный вектор параметров движения судна.
Сигнал управления формируется согласно линейному стационарному закону управления по формуле
где Kp,Kω,Kβ,Ky,Kδ - постоянные коэффициенты закона управления, которые определяются гидродинамикой судна и требуемым качеством управления.
Если оценка путевого угла равна заданному путевому углу, оценки угловой скорости судна в горизонтальной плоскости, угла дрейфа, бокового отклонения равны нулю и угол перекладки руля равен нулю, то согласно закону управления (1) скорость перекладки руля будет равна нулю. Если судно отклонится от заданного путевого угла, то появится сигнал управления, приводящий к отклонению рулевого устройства 8 от нейтрального положения, после этого начнется поворот судна к заданному направлению движения. Через некоторое время судно вернется на заданное направление движения, а рулевое устройство - в нейтральное положение.
В предложенном устройстве автоматического управления движением судна стабилизация и управление движением осуществляются по более сложному закону, чем в прототипе: добавлено слагаемое Kβ•βe, которое обеспечивает управление движением судна с учетом полного вектора параметров движения судна, что обеспечивает более точное движение по заданной траектории.
Формирование оценок параметров движения в блоке оценки состояния судна 10 осуществляется следующим образом.
Сумматор 14 вырабатывает невязку оценки угловой скорости Δω = ω-ωe.
Сумматор 13 вырабатывает отклонение оценки путевого угла от заданного путевого угла Δφз = φe-φз.
Сумматор 12 вырабатывает невязку оценки путевого угла Δφ = φ-φe.
Сумматор 15 вырабатывает невязку оценки бокового отклонения Δy=y-yе.
Умножитель 19 вырабатывает произведение текущей скорости на текущее положение руля V•δ.
Умножитель 16 вырабатывает произведение текущей скорости на текущую оценку угловой скорости V•ωe.
Умножитель 17 вырабатывает произведение текущей скорости на текущую оценку угла дрейфа V•βe.
Умножитель l8 вырабатывает произведение квадрата текущей скорости на текущее положение руля V2•δ.
Первый интегратор 20 выполняет интегрирование выражения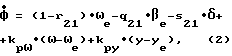
где r21, q21 - коэффициенты математической модели движения судна, определяемые гидродинамикой судна, kpω, kpy - коэффициенты блока оценки состояния судна.
Второй интегратор 21 выполняет интегрирование выражения
где r31, q31 - коэффициенты математической модели движения судна, определяемые гидродинамикой судна, kωy - коэффициент блока оценки состояния судна.
Третий интегратор 22 выполняет интегрирование выражения
где kβy - коэффициент блока оценки состояния судна.
Четвертый интегратор 23 выполняет интегрирование выражения
y = V•sin(φe-φз)+kур•(ϕ+ϕe)+kyy•(y-ye), (5)
где kyp, kyy - коэффициенты блока оценки состояния судна.
Коэффициенты блока оценки состояния судна имеют следующие размерности: kpω, град. /(град. /с); kpy, град./м; kωy, (град./с)/м; kβy, град./м; kyp, м/град.; kyy, безразмерный.
При указанной размерности коэффициенты kpω и kyp равны единице. Коэффициенты kpy,kωy,kβy,kyy могут быть вычислены на компьютере по заданным собственным числам блока оценки состояния судна без использования итерационной процедуры. Методика вычисления коэффициентов kpy,kωy,kβy,kyy состоит из следующих шагов. Пусть А - матрица линейной модели продольного движения судна, С - матрица измерений, λZ - вектор заданных собственных чисел блока оценки состояния судна, К1 - вспомогательная матрица.
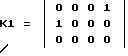
Вычислить матрицу Atk = AT - С•К1. К матрице Atk применить процедуру, в результате ее работы вырабатывается вектор (kpy,kωy,kβy,kyy), элементами которого являются искомые коэффициенты.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОВОДКИ СУДНА ПО УЗКИМ УЧАСТКАМ ФАРВАТЕРОВ | 2008 |
|
RU2382987C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПО ГЛУБИНЕ | 2012 |
|
RU2513157C1 |
Изобретение относится к области судовождения, в частности к системам автоматического управления продольным движением судна. Устройство управления движением судна содержит датчик угла перекладки руля, датчик угловой скорости поворота судна, задатчик путевого угла, рулевое устройство судна, приемник спутниковых навигационных систем с антенной, автоматический регулятор путевого угла. Автоматический регулятор путевого угла состоит из вычислителя бокового отклонения судна от заданной траектории, блока оценки состояния судна и сумматора. Блок оценки состояния судна содержит четыре сумматора, четыре умножителя и четыре интегратора, выходы которых являются выходами блока оценки состояния судна. Закон, по которому осуществляется стабилизация и управление движением судна, включает оценку угла дрейфа. Изобретение позволяет повысить точность работы контура управления. 2 ил.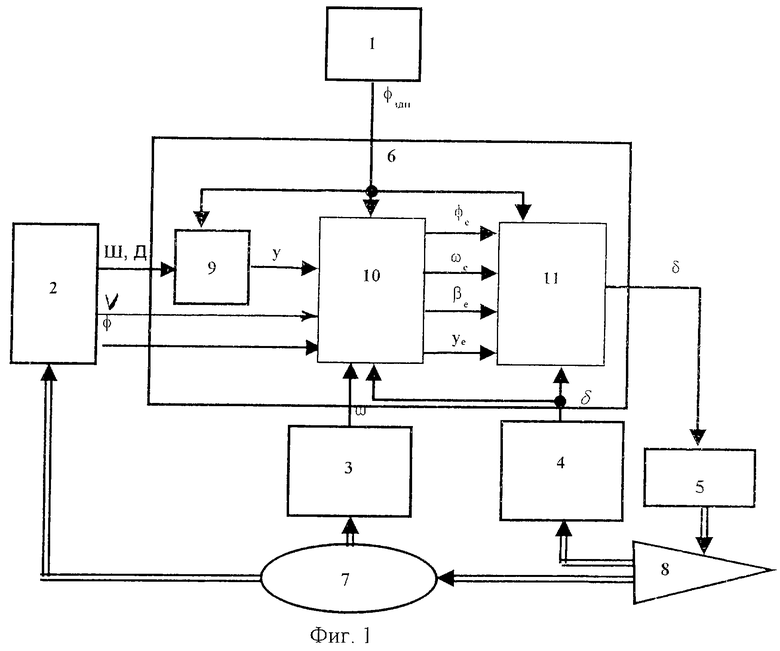
Устройство управления движением судна, содержащее датчик угла перекладки руля, датчик угловой скорости поворота судна, задатчик путевого угла, рулевое устройство судна, механически связанное с датчиком угла перекладки руля, приемник спутниковых навигационных систем с антенной, механически связанной с корпусом судна, автоматический регулятор путевого угла, состоящий из блока оценки состояния судна и сумматора, причем выход датчика угловой скорости поворота судна соединен с первым входом автоматического регулятора путевого угла, со вторым входом которого соединен выход датчика угла перекладки руля, три выхода блока оценки состояния судна соединены с тремя входами сумматора, выход которого является выходом автоматического регулятора путевого угла и соединен с приводом рулевого устройства судна, блок оценки состояния судна содержит три интегратора, выходы которых являются тремя выходами блока оценки состояния судна, отличающееся тем, что автоматический регулятор путевого угла дополнительно содержит вычислитель бокового отклонения судна от заданной траектории, первый вход которого является третьим входом автоматического регулятора путевого угла, который соединен с первым выходом приемника спутниковых навигационных систем с антенной, а второй вход вместе с первым входом блока оценки состояния судна и пятым входом сумматора является четвертым входом блока автоматического регулятора путевого угла, который соединен с выходом задатчика путевого угла, блок оценки состояния судна дополнительно содержит четыре сумматора, четыре умножителя и четвертый интегратор, выход которого является четвертым выходом блока оценки состояния судна и соединен с четвертым входом сумматора автоматического регулятора путевого угла, первый вход первого сумматора является первым входом блока оценки состояния судна, его второй вход соединен с выходом первого интегратора и первым входом второго сумматора, второй вход которого является вторым входом блока оценки состояния судна и пятым входом блока автоматического регулятора путевого угла, который соединен со вторым выходом приемника спутниковых навигационных систем, второй вход третьего сумматора является третьим выходом блока оценки состояния судна и первым входом блока автоматического регулятора путевого угла, первый вход третьего сумматора соединен с выходом второго интегратора, первым входом первого и третьего интеграторов и первым входом первого умножителя, второй вход которого соединен с первым входом второго, третьего и четвертого умножителей, является четвертым входом блока оценки состояния судна и шестым входом блока автоматического регулятора путевого угла и соединен с третьим выходом приемника спутниковых навигационных систем, второй вход четвертого умножителя является пятым входом блока оценки состояния судна и вместе с шестым входом сумматора автоматического регулятора путевого угла образует второй вход блока автоматического регулятора путевого угла, второй вход четвертого сумматора является шестым входом блока оценки состояния судна и соединен с выходом вычислителя бокового отклонения судна от заданной траектории, его первый вход соединен с выходом четвертого интегратора, а выход соединен с третьим входом четвертого интегратора и четвертым входом первого, второго и третьего интеграторов, второй вход второго умножителя соединен со вторым входом первого и третьего интеграторов и выходом третьего интегратора, выход четвертого умножителя соединен со вторым входом третьего умножителя и третьим входом первого и третьего интеграторов, выходы первого, второго и третьего сумматоров соединены с первым и вторым входами четвертого интегратора и пятым входом первого интегратора соответственно, выходы первого, второго и третьего умножителей соединены с первым, вторым и третьим входами второго интегратора соответственно.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2133491C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 1999 |
|
RU2151713C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |

