Уже известны способы экспериментального определения чувствительности временных характеристик замкнутых систем автоматического управления к изменению их параметров, основанные на моделировании коэффициентов влияния этих систем к вариациям упомянутых параметров.
Предложенный способ отличается от известных тем, что в результате подачи возмущающего воздействия сигнал с выхода исследуемой системы задерживают на проме(уток времени, достаточный для затухания переходного процесса, и затем вновь подают на ег вход, а полученный при этом сигнал рассогласования системы пропускают через блок с передаточной функцией, зависящей только от того параметра, влияние которого определяют в данный момент времени. Это позволило упростить технику эксперимента и уменьщить требуемый состав моделирующей аппаратуры. Пример схемы реализации способа приведен на чертеже.
Определяемые коэффициенты влияния
(t, cii ), т. е. частные производные вида
П.
9,;- параметр;
t- время,
вычисляется в соответствии с формулами, преобразованными к виду
Q(P,q,)x(P).ф. (P;)Wf(P),
(1)
где Р - оператор Лапласа
dW, (Р)
гГ(р) -- .
(2)
Wi(P) д In У
функция, зависящая от передаточной функции W (Р)-го звена системы,
Фг (Р.д) - передаточная функция системы по ощибке. Во временной области соответственно
Г (t,g,) L-1 IX(P) Ф, (Я, q) . Wt (Р). (3) Приведенный вариант схемы относится к случаю определения чувствительности функции веса системы управления к вариации постоянной времени Т входящего в нее периодического звена. В соответствии с (2)
Т,Р
W(P) (4)
Т(Р + 1
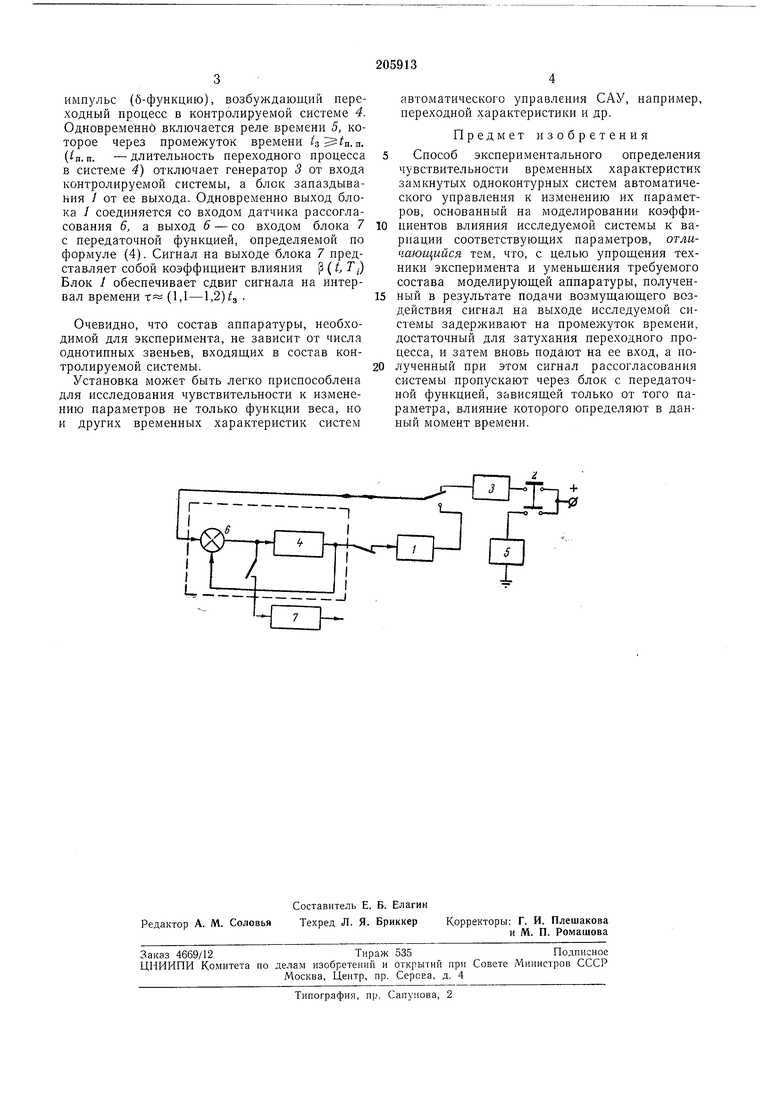
На чертеже показана блок-схема, поясняющая способ.
Для создания временной задержки т используется блок / постоянного запаздывания типа БПЗ-1, входящий в комплект модели МН-7.
импульс (б-функцию), возбуждающий переходный процесс в контролируемой системе 4. Одновременно включается реле времени 5, которое через промежуток времени .п. (п. п. -длительность переходного процесса в системе 4} отключает генератор 3 от входа контролируемой системы, а блок запаздывания 1 от ее выхода. Одновременно выход блока / соединяется со входом датчика рассогласования 6, а выход 6 - со входом блока 7 с передаточной функцией, определяемой по формуле (4). Сигнал на выходе блока 7 представляет собой коэффициент влияния (t, Тj) Блок 1 обеспечивает сдвиг сигнала на интервал времени т (1,1 - ,2.)ts
Очевидно, что состав аппаратуры, необходимой для эксперимента, не зависит от числа однотипных звеньев, входящих в состав контролируемой системы.
Установка может быть легко приспособлена для исследования чувствительности к изменению параметров не только функции веса, но и других временных характеристик систем
автоматического управления САУ, например, переходной характеристики и др.
Предмет изобретения
Способ экспериментального определения чувствительности временных характеристик замкнутых одноконтурных систем автоматического управления к изменению их параметров, основанный на моделировании коэффициентов влияния исследуемой системы к вариации соответствующих параметров, отличающийся тем, что, с целью упрощения техники эксперимента и уменьщения требуемого состава моделирующей аппаратуры, полученный в результате подачи возмущающего воздействия сигнал на выходе исследуемой системы задерживают на промежуток времени, достаточный для затухания переходного процесса, и затем вновь подают на ее вход, а полученный при этом сигнал рассогласования системы пропускают через блок с передаточной функцией, зависящей только от того параметра, влияние которого определяют в данный момент времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения функцийчуВСТВиТЕльНОСТи СиСТЕМыАВТОМАТичЕСКОгО упРАВлЕНия | 1978 |
|
SU834675A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Пневматическое устройство компенсациизАпАздыВАНия | 1975 |
|
SU805255A2 |
| Система управления для объектов с запаздыванием | 1984 |
|
SU1239686A1 |
| Регулятор для объектов с запаздыванием | 1986 |
|
SU1361503A1 |
| Устройство для регулирования теплового режима методической индукционной установки | 1984 |
|
SU1202082A2 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Комбинированная система управления | 1987 |
|
SU1536352A1 |
