Изобретение относится к управлению подвижными объектами, частности к управлению движением морскими судами и кораблями.
Известны авторулевые для управления морскими судами, в которых для повышения точности стабилизации курса судна при построении закона управления в сигнал угла курса вводится коррекция по ошибке от угла крена. Полученные таким образом оценки сигнала угла курса исключают часть помехи в сигнале угла курса [1] .
Недостатком авторулевого является зашумленность сигналов угла курса и производной от угла курса углами рыскания судна (высокочастотной компонентой) от воздействия морского волнения. Другим недостатком является отсутствие блока контроля и диагностики, что может привести к аварийной ситуации.
В авторулевом, принятом за прототип, предложено использовать для формирования закона управления сигнал оценки угловой скорости судна, который вырабатывается с помощью модели движения судна. Система содержит датчики угла курса и угла перекладки руля, задатчик угла курса, блок формирования угловой скорости судна, суммирующий усилитель, выход которого подключен к рулевому приводу, а входы соединены соответственно с выходом модели движения судна, выходами датчика и задатчика курса, датчика положения руля. К входу модели движения судна подключен датчик положения руля, который через два интегратора подключен к выходу модели, в которую введено два сумматора с соответствующими связями для формирования сигнала оценки угловой скорости судна.
Недостатком системы является отсутствие блока контроля и диагностики, что может привести к аварийной ситуации в случае сбоя (отказа) в работе: датчика курса; модели движения судна; суммирующего усилителя; регулятора рулевого привода (отключения питания регулятора рулевого привода).
Цель изобретения - повышение безопасности управления.
Это достигается введением блока контроля и диагностики, содержащего три реле, пять световых индикаторов, сумматор, интегратор, конденсатор и резистор.
Указанные отличительные признаки в своей совокупности обеспечивают появление в заявленном объекте ряд новых свойств, заключающихся в определении и индикации судоводителю возможных отказов основных блоков системы, причем благодаря введению избыточных измерителей контролируют исправность датчиков входной информации о состоянии судна и рулевого привода по невязкам измерений углов курса и оценки угла курса (угла рыскания) и измерению угловой скорости и оценки угловой скорости по курсу. В блоке контроля и диагностики восстанавливается суммарный сигнал управления рулевым приводом, что позволяет диагностировать исправность модели движения судна и суммирующего усилителя; восстановление же истинной скорости перекладки руля и сравнение с заданной позволяет контролировать исправность работы рулевого привода.
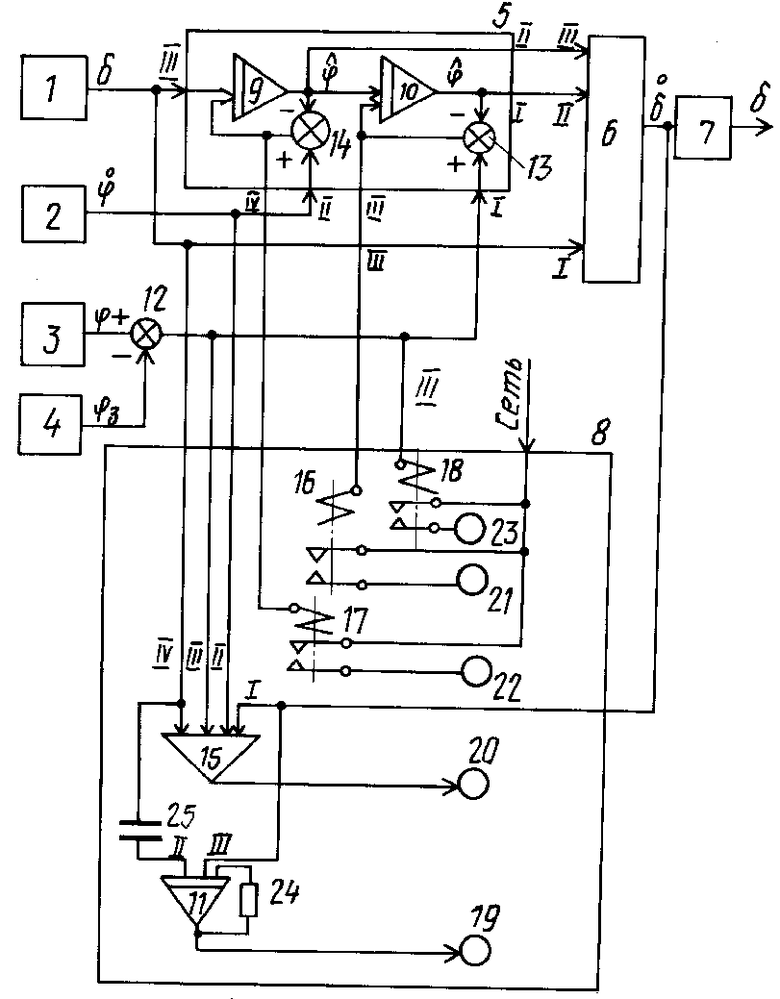
На чертеже приведена блок-схема предлагаемой системы.
Система содержит датчики положения руля 1, угловой скорости судна 2, угла курса 3, задатчик 4 курса, модель 5 движения судна, сумматор-усилитель 6, рулевой привод 7, блок 8 контроля и диагностики, три интегратора 9-11, четыре суммаатора 12-15, три реле 16-18, пять световых индикаторов 19-23, резистор 24 и конденсатор 25. Датчики 1-4 могут быть серийно выпускаемые и устанавливаемые во всех авторулевых. Модель 5 движения судна формируется на аналоговых элементах: два интегратора 9 и 10 - операционные усилители типа 140-УД-8, два сумматора 14 и 15 - операционные усилители типа 140-УД-6.
Сумматор-усилитель 6 может быть реализован на усилителе типа 140 УД-6, на выход которого подключен эмиттерный повторитель с мощностью выхода 5-10 Вт. Блок 8 контроля и диагностики 8 реализуется на операционных усилителях: сумматор 15 - "140 УД-6", интегратор 11 - "140-УД-8", трех электромагнитных реле типа РЭС-9 с одной нормально разомкнутой группой каждое,
в качестве световых индикаторов 19-23 могут использоваться световые диоды, либо электролампы.
Датчик 3 и задатчик 4 через сумматор 12 и датчики 1 и 2 подключены к входам модели 5 движения судна, выходы которой через сумматор-усилитель 6 соединены с рулевым приводом 7. Блок 8 контроля и диагностики в соответствии с блок-схемой, приведенной на чертеже, соединен с указанными датчиками, моделью 5 и сумматором-усилителем 6.
Работа системы в динамике следующая.
В системе автоматического управления курсом судна формируется закон управления рулевым приводом вида = Δϕ+K
= Δϕ+K -Kδδ
-Kδδ  (1) где Δϕ - сигнал, пропорциональный рассогласованию судна по курсу и формируемый датчиком 3 и задатчиком 4 (в соответствии с блок-схемой, приведенной на чертеже, Δϕ в зависимости (1) может формироваться как сумма Δϕ= K1(ϕ-ϕз)+(1-K1)
(1) где Δϕ - сигнал, пропорциональный рассогласованию судна по курсу и формируемый датчиком 3 и задатчиком 4 (в соответствии с блок-схемой, приведенной на чертеже, Δϕ в зависимости (1) может формироваться как сумма Δϕ= K1(ϕ-ϕз)+(1-K1) ;
; - оценка сигнала скорости изменения курса, вырабатывается моделью 5 движения судна;
- оценка сигнала скорости изменения курса, вырабатывается моделью 5 движения судна;
δ- сигнал положения руля, вырабатываемый датчиком 1.
Формирование зависимости (1) производится в сумматоре-усилителе 6 для управления регулятором 7 рулевого привода.
Таким образом, при движении судна по заданному курсу на выходе усилителя 6 сигнал равен нулю, а, следовательно, и руль неподвижен и находится в балансировочном положении. В случае изменения курса или появления угла рыскания на выходе усилителя 6 вырабатывается напряжение, приводящее к отклонению руля для сведения сигнала Δϕ к нулю.
Формирование оценки угловой скорости судна ( ) осуществляется в модели 5 движения судна в соответствии с зависимостями
) осуществляется в модели 5 движения судна в соответствии с зависимостями = K
= K -K12δ+K13(
-K12δ+K13( -
- ) (2)
) (2) =
=  +K12(Δϕ-
+K12(Δϕ- ) (3) т. е.
) (3) т. е.  - является оценкой Δϕ .
- является оценкой Δϕ .
Блок 8 контроля и диагностики позволяет непрерывно во время работы системы контролировать соответствие текущего курса заданному, исправность датчиков, исправность модели 5 движения судна и суммирующего усилителя 6, исправность рулевого привода 7 (в том числе и наличие питания на нем).
Превышение допустимого отклонения судна от заданного курса регистрируется световым индикатором 23, который подключается к сети питания при срабатывании реле 18.
Реле 18 срабатывает в случае, если сигнал Δϕ= ϕ-ϕз , снимаемый с выхода сумматора 12 превышает напряжение срабатывания реле 18, т. е. если Δϕ>Δϕ допустимое. Δϕ допустимое можно устанавливать заранее путем введения дополнительного переменного сопротивления в цепь питания обмотки реле 18.
Отказ датчиков 2 (3) сигнализирует срабатывание световых индикаторов 22 (21).
Загорание индикатора 22 происходит, если срабатывает реле 17. При отказе датчика 2 сигнал, снимаемый с него, отличается от сигнала оценки угловой скорости судна, вырабатываемой в модели движения судна на выходе интегратора 9, и если эта разница превышает напряжение срабатывания реле 17, то индикатор 22 подключается к сети питания.
При исправном датчике 2 разница сигналов на выходе сумматора 14 не должна превышать допустимое значение, так как в соответствии с зависимостью (2)  ≈
≈  (если принятая математическая модель движения судна (2) не существенно отличается от реального процесса углового движения судна).
(если принятая математическая модель движения судна (2) не существенно отличается от реального процесса углового движения судна).
Загорание индикатора 21 происходит, если срабатывает реле 16, т. е. при существенном отличии сигнала, снимаемого с сумматора 12, от сигнала оценки угла рыскания курса ( ( ) ).
) ).
Оценка угла рыскания курса  вырабатывается на выходе интегратора 10 в соответствии с зависимостью (3) и по этому при исправности датчика 3 невязка ((Δϕ-
вырабатывается на выходе интегратора 10 в соответствии с зависимостью (3) и по этому при исправности датчика 3 невязка ((Δϕ- )) близка к нулю.
)) близка к нулю.
Неисправность модели движения 5 и суммирующего усилителя 6 фиксируется загоранием индикатора 20, которое происходит, если на суммирующем усилителе 15 суммарный сигнал отличен от нуля и превышает некоторую величину (Δϕ+K
(Δϕ+K -Kδδ)-
-Kδδ)- >C1 , (4) где δ - сигнал, снимаемый с усилителя 6 в соответствии с зависимостью (1);
>C1 , (4) где δ - сигнал, снимаемый с усилителя 6 в соответствии с зависимостью (1);
(Δϕ+K -Kδδ) - сигнал, формируемый на входе сумматора 15, аналогичный вырабатываемому на выходе усилителя 6 в исправном состоянии.
-Kδδ) - сигнал, формируемый на входе сумматора 15, аналогичный вырабатываемому на выходе усилителя 6 в исправном состоянии.
Неисправность (отсутствие питания) рулевого привода выявляется по засветке индикатора 19, который срабатывает при появлении среднего значения выходного сигнала более допустимого. При исправном рулевом приводе производная от текущего значения угла перекладки руля равна заданному значению скорости перекладки руля (в линейной области работы рулевого привода); = /
= / /среднее, (5) где
/среднее, (5) где  - усредненная с выхода усилителя 6 заданная на входе рулевого привода скорость перекладки руля;
- усредненная с выхода усилителя 6 заданная на входе рулевого привода скорость перекладки руля; - сигнал текущего значения угла перекладки руля, выработанный датчиком 1 положения руля, который с датчика 1 через конденсатор 25 поступает на вход интегратора 11; последний схвачен отрицательной обратной связью, что позволяет усреднять оба входных сигнала, приведенных в зависимости (5).
- сигнал текущего значения угла перекладки руля, выработанный датчиком 1 положения руля, который с датчика 1 через конденсатор 25 поступает на вход интегратора 11; последний схвачен отрицательной обратной связью, что позволяет усреднять оба входных сигнала, приведенных в зависимости (5).
Проведенное моделирование позволяет считать, что предложенная система вполне работоспособна и позволит судоводителю своевременно исключить не только сбои отдельных блоков, но и системы в целом с рулевым приводом, повышая тем самым эффективность и безопасность автоматического управления судном. (56) Авторское свидетельство СССР N 229651, кл. G 05 D 1/00, 1966.
Авторское свидетельство СССР N 540258, кл. G 05 D 1/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
Изобретение относится к управлению движением судами и кораблями. Цель изобретения - повышение качества стабилизации и автоматического управления судна по курсу, а также повышение безопасности судовождения. Для достижения цели в систему введен блок контроля и диагностики, позволяющий отключать в динамике сильно зашумленные измерения параметров движения судна и сигнализировать судоводителю о возникновении сбоев в работе системы. 1 ил.
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА, содержащая датчики положения руля, курса судна и угловой скорости судна, задатчик курса и сумматор-усилитель, а также два интегратора и три сумматора, причем датчик положения руля подключен к первому входу сумматора-усилителя и первому входу первого интегратора, выход которого подключен к второму входу сумматора-усилителя, первому входу второго интегратора и через первый сумматор - к второму входу первого интегратора, выход второго интегратора подключен к третьему входу сумматора-усилителя и через второй сумматор - к второму входу второго интегратора, выход датчика угловой скорости судна подключен к второму входу первого сумматора, а выходы датчика курса судна и задатчика курса подключены соответственно к первому и второму входам третьего сумматора, выход которого подключен к второму входу второго сумматора, отличающаяся тем, что, с целью повышения надежности, в нее введен блок контроля и диагностики, содержащий три реле с замыкающими группами контактов, пять световых индикаторов, четвертый сумматор, интегрирующий усилитель, дифференцирующий конденсатор и масштабный резистор, причем масштабный резистор подключен к первому входу и выходу интегрирующего усилителя, выход которого также связан с первым световым индикатором, второй световой индикатор подключен к выходу четвертого сумматора, первый - четвертый входы которого связаны соответственно с выходами сумматора-усилителя, датчика угловой скорости судна, третьего сумматора и датчика положения руля, дифференцирующий конденсатор подключен к четвертому входу четвертого сумматора и к второму входу интегрирующего усилителя, третий вход которого связан с первым входом четвертого сумматора, управляющие входы первого, второго и третьего реле соединены соответственно с выходами первого, второго и третьего сумматоров, а третий, четвертый и пятый световые индикаторы связаны с сетью через замыкающие контакты соответственно первого, второго и третьего реле.
