Изобретение относится к измерительной технике и может быть использовано для обработки сигнала при бесконтактном измерении отклонений рельса в одной или нескольких плоскостях от прямой линии.
Известно устройство для контроля прямолинейности рельсовых путей (а.с. СССР №1576616, Е 01 В 35/04, G 01 В 11/30). Устройство содержит излучатель на подвижной платформе, анализатор прямолинейности, приемник, пульт управления, регистратор и вычислительное устройство.
Известно также устройство для контроля прямолинейности поверхности (заявка №3-49362, G 01 В 11/24, Япония). Устройство содержит источник оптического излучения, формирующий несколько параллельных световых пучков, последовательно установленных по ходу излучения, подставку с гладкой поверхностью для измеряемого объекта, расположенного перпендикулярно излучению, образцовый элемент, расположенный параллельно измеряемому объекту и приемник, регистрирующий прошедшее излучение, выход которого соединен с входом операционного блока.
К недостатку названных устройств относится то, что они не позволяют проводить контроль прямолинейности рельсов при поступательном перемещении последних по транспортному рольгангу в условиях поточного рельсового производства.
Известна также система для измерения прямолинейности и геометрических размеров рельсов Mesameter P SW фирмы MESACON Gesellschaft fur Messtechnik МВН (Германия) (Реферативный журнал. Металлургия. - 1997, №4 4Д69). Устройство содержит механическую часть с измерительной балкой для крепления измерительных датчиков, механизмы перемещения и фиксации измерительной балки по высоте, механизмы перемещения рельса через зону контроля, импульсные датчики пройденного рельсом пути на входе и выходе измерительной установки, щеточную машину для грубой очистки поверхности рельса от окалины, лазерные датчики для бесконтактного измерения расстояния до контролируемой поверхности и операционный блок для ввода, анализа и отображения информации. Полученная с датчиков информация анализируется по методу Фурье, в результате чего определяются пространственные длины волн и их амплитуды. Недостатками данной системы являются обязательность очистки рельсов от окалины и прочих загрязнений поверхности, необходимость образцового рельса с жесткими допусками по отклонениям от идеальной плоскости, высокие требования, предъявляемые к механизмам перемещения рельса через зону контроля, низкая скорость контроля (до 1 м/с).
Наиболее близким к предлагаемому является устройство по [а.с. СССР №2151705 С1, В 61 К 9/08]. Устройство содержит механическую часть, для крепления измерительных датчиков, механизмы перемещения рельса через зону контроля, импульсные датчики пути на входе и выходе измерительной установки и операционный блок, соответствующие входы которого соединены с выходами импульсных датчиков, не менее чем три радиочастотных датчика для бесконтактного измерения расстояния до поверхности рельса в каждой из контролируемых поверхностей и маркеры для автоматической разбраковки продукции, входы которых соединены с соответствующими выходами операционного блока, каждый из радиочастотных датчиков представляет собой последовательно соединенные катушку индуктивности и высокочастотный генератор, выход которого соединен с соответствующим входом операционного блока, причем операционный блок автоматически выполняет регулярную проверку параметров радиочастотных датчиков с целью минимизации погрешности измерения, а прямолинейность движущегося рельса рассчитывается аналитически в зависимости от величины текущих зазоров между неподвижными радиочастотными датчиками и контролируемыми поверхностями рельса. Недостатками данного устройства является невозможность измерения прямолинейности концевых участков рельса, длина которых зависит от числа установленных радиочастотных датчиков и расстояний между ними, невозможность построения профилеграммы продольного профиля рельса, а также профилеграммы местных прогибов относительно базы любой заданной длины, так как устройство позволяет построить профилеграмму местных прогибов относительно базы, длина которой зависит от того, на каких расстояниях друг от друга размещены радиочастотные датчики.
Задачей, на решение которой направлено заявляемое изобретение, является получение достоверных оценок, как продольного профиля рельса, так и местных прогибов относительно базы любой заданной длины, включая концевые участки.
Технический результат достигается тем, что устройство для контроля прямолинейности рельсов, содержащее механическую часть для крепления измерительных датчиков, механизмы перемещения рельса через зону контроля, импульсные датчики пути на входе и выходе измерительной установки, не менее трех радиочастотных датчиков для бесконтактного измерения расстояния до поверхности рельса в каждой из контролируемых плоскостей, маркеры для автоматической разбраковки продукции, операционный блок, соответствующие входы которого соединены с выходами импульсных датчиков пути и который оценивает величину зазоров между радиочастотными датчиками и рельсом на основании сигналов измерительной информации полученных от радиочастотных датчиков, а также осуществляет управление маркерами, снабжено оценивающим блоком, который оценивает продольный профиль и местные прогибы рельса в зависимости от величины зазоров между неподвижными радиочастотными датчиками и контролируемыми поверхностями рельса, используя сплайн-интерполяцию [Стечкин С.Б., Субботин Ю.Н. Сплайны в вычислительной математике. - М.: Наука, 1976] для вычисления оценок локальных профилей и процедуру последовательной сшивки оценок локальных профилей, в состав которого входят блок сплайн-интерполяции, состоящий из блока вычисления коэффициентов сплайнов, вход которого соединен с соответствующим выходом операционного блока, и из блока оценки локального профиля, вход которого соединен с выходом блока вычисления коэффициентов сплайна, выход блока оценки локального профиля соединен с входом первого блока памяти, соответствующие выходы которого соединены с входами первого, второго и третьего блока вычитания, выходы первого, второго и третьего блока вычитания соединены с входами соответственно, первого, второго и третьего сумматора, при этом первые блок вычитания и сумматор входят в состав первого функционального блока, вторые блок вычитания и сумматор входят в состав второго функционального блока и третьи блок вычитания и сумматор входят в состав третьего функционального блока, соответствующие входы второго блока памяти соединены с выходами первого, второго и третьего сумматора, выход второго блока памяти соединен с входом блока усреднения, соответствующие выходы которого через третий блок памяти соединены с соответствующими входами первого, второго, третьего сумматоров, блока оценки местных прогибов и операционного блока, выход блока оценки местных прогибов соединен с входом четвертого блока памяти, выход которого соединен с соответствующим входом операционного блока.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков, оценивающего блока, который оценивает продольный профиль и местные прогибы рельса в зависимости от величины зазоров между неподвижными радиочастотными датчиками и контролируемыми поверхностями рельса, используя сплайн-интерполяцию для вычисления оценок локальных профилей и процедуру последовательной сшивки оценок локальных профилей, в состав которого входят блок сплайн-интерполяции, состоящий из блока вычисления коэффициентов сплайнов, вход которого соединен с соответствующим выходом операционного блока и из блока оценки локального профиля, вход которого соединен с выходом блока вычисления коэффициентов сплайна, выход блока оценки локального профиля соединен с входом первого блока памяти, соответствующие выходы которого соединены с входами первого, второго и третьего блока вычитания, выходы первого, второго и третьего блока вычитания соединены с входами соответственно, первого, второго и третьего сумматора, при этом первые блок вычитания и сумматор входят в состав первого функционального блока, вторые блок вычитания и сумматор входят в состав второго функционального блока и третьи блок вычитания и сумматор входят в состав третьего функционального блока, соответствующие входы второго блока памяти соединены с выходами первого, второго и третьего сумматора, выход второго блока памяти соединен с входом блока усреднения, соответствующие выходы которого соединены с соответствующими входами первого, второго, третьего сумматоров, блока оценки местных прогибов и операционного блока, выход блока оценки местных прогибов соединен с входом четвертого блока памяти, выход которого соединен с соответствующим входом операционного блока. Таким образом, заявляемое устройство соответствует критерию изобретения "новизна".
Сравнение заявляемого решения с другими техническими решениями показывает, что использование процедуры сплайн-интерполяции для вычисления оценок локального продольного профиля и вычисление оценок продольного профиля путем последовательной сшивки оценок локальных профилей позволяет достичь результата, удовлетворяющего давно существующую общественную потребность, попытки получения которого долгое время не удавались специалистам, а именно получение продольного профиля рельса, включая его концевые части, во время транспортирования рельса через зону контроля, а значит в условиях скачков и упругого деформирования рельса как в плоскости параллельной поверхности катания, так и в перпендикулярной плоскости. Таким образом, заявляемое устройство соответствует условию "изобретательский уровень".
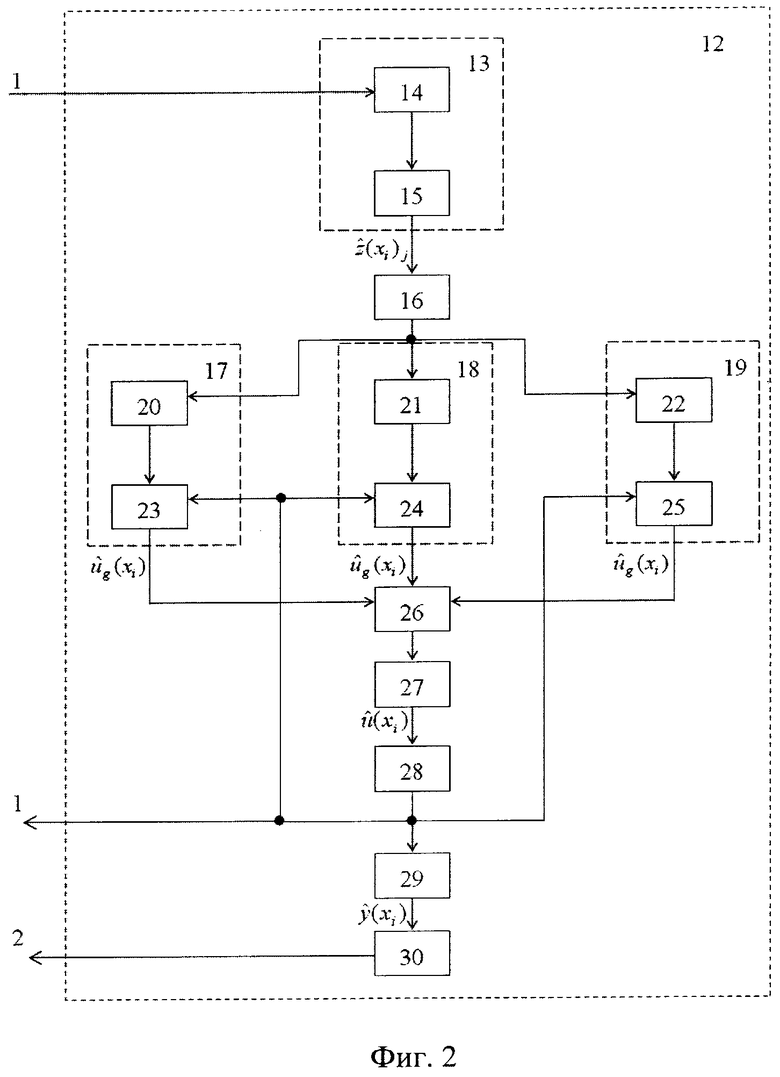
Заявляемое изобретение поясняется чертежами, где на фиг.1 представлена блочная функциональная электрическая схема устройства, на фиг.2 - блочная функциональная схема оценивающего блока, на фиг.3 - пример продольного профиля рельса, на фиг.4 - пример оценивания местного прогиба рельса, на фиг.5, 6, 7 - схемы работы блока сплайн-интерполяции соответственно в первом, втором и третьем положении рельса.
Устройство для контроля прямолинейности рельса содержит механическую часть 1 для крепления измерительных датчиков, механизмы 2 перемещения рельса через зону контроля, импульсные датчики 3 пути на входе и выходе измерительного устройства, операционный блок 4, радиочастотные датчики 5-10 для бесконтактного измерения расстояния до контролируемой поверхности, маркеры 11 для автоматической разбраковки продукции, оценивающий блок 12, блок 13 сплайн-интерполяции, блок 14 вычисления коэффициентов сплайнов, блок 15 оценки локального профиля, первый блок 16 памяти, первый 17, второй 18 и третий 19 функциональные блоки, первый 20, второй 21 и третий 22 блоки вычитания, первый 23, второй 24 и третий 25 сумматоры, второй блок 26 памяти, блок 27 усреднения, третий блок 28 памяти, блок 29 оценки местных прогибов и четвертый блок 30 памяти.
Техническая реализация устройства может быть выполнена следующим образом. Механическая часть 1 для крепления измерительных датчиков изготавливается из стального уголка или швеллера и закрепляется неподвижно на фундаменте. Механизмы 2 перемещения рельса через зону контроля могут представлять собой ролики транспортного рольганга, форма которых ограничивает свободу перемещения рельса в горизонтальной плоскости. В качестве импульсных датчиков пути может применяться устройство, представляющее собой фотоэлектрический узел, формирующий импульсы при вращении прижатого к поверхности рельса прорезиненного диска так, чтобы на пройденный рельсом определенный отрезок пути приходился один импульс. Каждый из радиочастотных датчиков 5-10 для бесконтактного измерения расстояния до контролируемой поверхности представляет собой катушку индуктивности, жестко связанную с механической частью 1 для крепления измерительных датчиков и расположенную над поверхностью рельса. В качестве маркеров 11 для автоматической разбраковки продукции может быть использован любой управляемый краскоотметчик дефектов, например, по а.с. СССР №1226264 МКИ4 G 01 N 27/82, G 01 N 29/04. Операционный 4 и оценивающий 12 блоки могут быть выполнены на базе персонального компьютера IBM PC, дополненного специальной платой ввода/вывода дискретной информации и соответствующим программным обеспечением.
Устройство работает следующим образом. Контролируемый рельс 31 (фиг.1) транспортируется с помощью механизмов 2 перемещения рельса через зону контроля в положении на подошве, при этом между радиочастотными датчиками 5-10 и поверхностью рельса имеются зазоры, величина которых должна исключать возможность повреждения катушек радиочастотных датчиков. Радиочастотные датчики 5-10 разделены на группы, которые используются для измерения прямолинейности рельса в определенных плоскостях. В каждой группе должно быть не менее трех радиочастотных датчиков. Так, радиочастотные датчики 5, 7, 9 служат для замера прямолинейности поверхности катания рельса (в вертикальной плоскости), а радиочастотные датчики 6, 8, 10 - для замера прямолинейности боковой поверхности (в горизонтальной плоскости).
Сигнал измерительной информации с выходов радиочастотных датчиков попадает на вход операционного блока 4, который вычисляет расстояния hd(i) от радиочастотных датчиков d=1, 2,..., n (n - количество датчиков в соответствующей плоскости измерения) до точек поверхности рельса в i-ый координатный пространственный дискретный отсчет координаты х, i=1, 2,...JL, jl=L/Δ (L - длина рельса, Δ=(хi-хi-1) - заданный шаг пространственной дискретизации).
Информация о величинах зазоров между радиочастотными датчиками и рельсом с выхода операционного блока 4 попадает в блок 12 оценивания (фиг.2) на вход блока 13 сплайн-интерполяции, где в блоке 14 расчета коэффициентов сплайна рассчитываются коэффициенты кубического интерполирующего сплайна с узлами в точках замеров hd(i) по рекуррентным формулам:
где С - константа, зависящая от выбранного локального условия сплайна, С∈(1÷3) [Гольденберг Л.М., Климентов В.Е., Серединский А.В. Рекуррентные методы построения интерполяционных сплайн-функций. - Автоматика и телемеханика, 1979, №3, с.173-176]; a1(0)=a2(0)=a3(0)=0. В блоке 15 оценки локального профиля вычисляются оценки  локального профиля по формуле:
локального профиля по формуле:

где k=0, 1,..., m; m=b/Δ; b - расстояние между соседними датчиками; j - номер сплайна. В узлах интерполяции 
Оценки  локальных профилей сохраняются в первом блоке 16 памяти.
локальных профилей сохраняются в первом блоке 16 памяти.
Оценки локального профиля  с выхода блока памяти 16 попадают на входы первого 17, второго 18 или третьего 19 функциональных блоков, где вычисляются вариантные оценки
с выхода блока памяти 16 попадают на входы первого 17, второго 18 или третьего 19 функциональных блоков, где вычисляются вариантные оценки  продольного профиля соответственно для начала, середины и конца рельса. В первом 20, втором 21 и третьем 22 блоках вычитания вычисляются разности
продольного профиля соответственно для начала, середины и конца рельса. В первом 20, втором 21 и третьем 22 блоках вычитания вычисляются разности  оценок локальных профилей, принадлежащих одному и тому же сплайну j, но разным пространственным координатным дискретным отсчетам i рельса:
оценок локальных профилей, принадлежащих одному и тому же сплайну j, но разным пространственным координатным дискретным отсчетам i рельса:

где r - текущий пространственный дискретный отсчет рельса; р - пространственный дискретный отсчет рельса в узле интерполяции, когда оценка локального профиля является измеренной (а не интерполированной),  g=1, 2,..., w; w - количество вариантных оценок
g=1, 2,..., w; w - количество вариантных оценок  продольного профиля для i-го отсчета. Полученные разности поступают на входы соответственно первого 23, второго 24 и третьего 25 сумматоров, где вариантные оценки
продольного профиля для i-го отсчета. Полученные разности поступают на входы соответственно первого 23, второго 24 и третьего 25 сумматоров, где вариантные оценки  продольного профиля вычисляются по формуле:
продольного профиля вычисляются по формуле:

Для i-го пространственного дискретного отсчета рельса получаем несколько вариантных оценок  продольного профиля, которые накапливаются во втором блоке 26 памяти, а затем усредняются в блоке 27 усреднения по формуле:
продольного профиля, которые накапливаются во втором блоке 26 памяти, а затем усредняются в блоке 27 усреднения по формуле:
Таким образом, в первом 17, втором 18 и третьем 19 функциональных блоках, состоящих соответственно из первого блока 20 вычитания и первого сумматора 23, второго блока 21 вычитания и второго сумматора 24, третьего блока 22 вычитания и третьего сумматора 25, в блоке 26 памяти и блоке 27 усреднения, выполняется процедура последовательной сшивки оценок  локальных профилей, в результате которой вычисляется оценка
локальных профилей, в результате которой вычисляется оценка  продольного профиля поверхности рельса.
продольного профиля поверхности рельса.
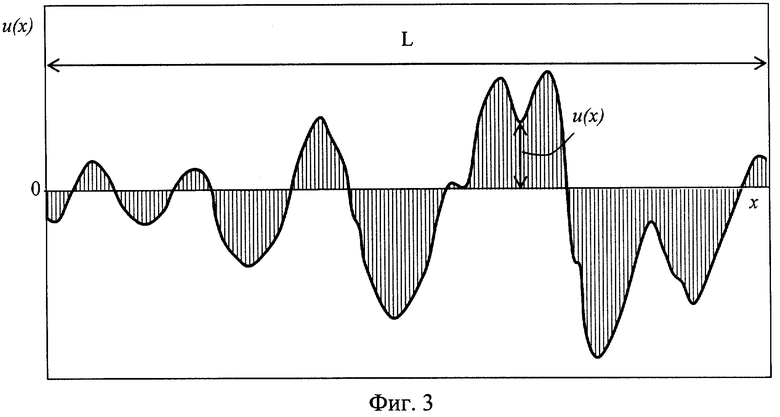
Продольный профиль - это диаграмма u(х) отклонений профиля поверхности рельса от идеальной горизонтальной линии, проведенной вдоль этого профиля по всей длине рельса L (Фиг.3).
С выхода блока 27 усреднения полученные оценки  продольного профиля рельса попадают в третий блок 28 памяти, где сохраняются.
продольного профиля рельса попадают в третий блок 28 памяти, где сохраняются.
Из третьего блока 28 памяти оценки  продольного профиля попадают на вход блока 29 оценки местных прогибов, где оценка
продольного профиля попадают на вход блока 29 оценки местных прогибов, где оценка  местных прогибов рассчитывается по формуле:
местных прогибов рассчитывается по формуле:

где s=l/(2·Δ); l - длина базы, относительно которой вычисляется местный прогиб.
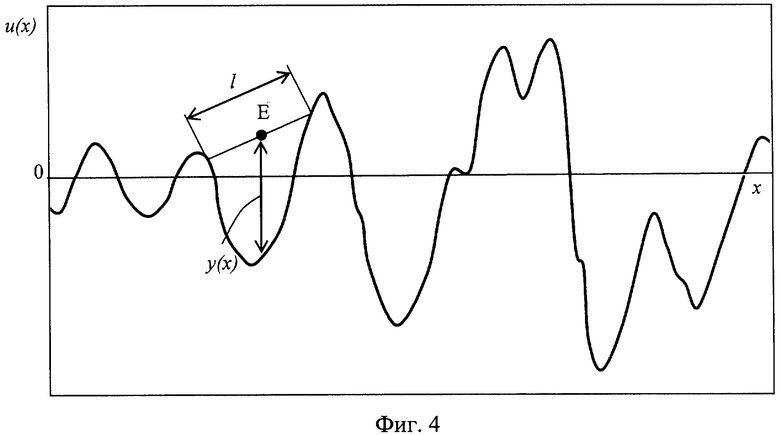
Местный прогиб - это отклонение y(x) профиля поверхности рельса от точки Е, принадлежащей прямой линии (базе) длиной l(l<L), которая скользит по поверхности рельса (фиг.4).
Полученные оценки  местных прогибов сохраняются в четвертом блоке 30 памяти.
местных прогибов сохраняются в четвертом блоке 30 памяти.
С выхода 1 оценивающего блока 12, оценки  продольного профиля и с выхода 2 оценивающего блока 12 оценки
продольного профиля и с выхода 2 оценивающего блока 12 оценки  местных прогибов попадают на соответствующие входы операционного блока, где принимается решение о принадлежности участка рельса к тому или иному "браковочному" уровню и вырабатываются управляющие воздействия на маркеры.
местных прогибов попадают на соответствующие входы операционного блока, где принимается решение о принадлежности участка рельса к тому или иному "браковочному" уровню и вырабатываются управляющие воздействия на маркеры.
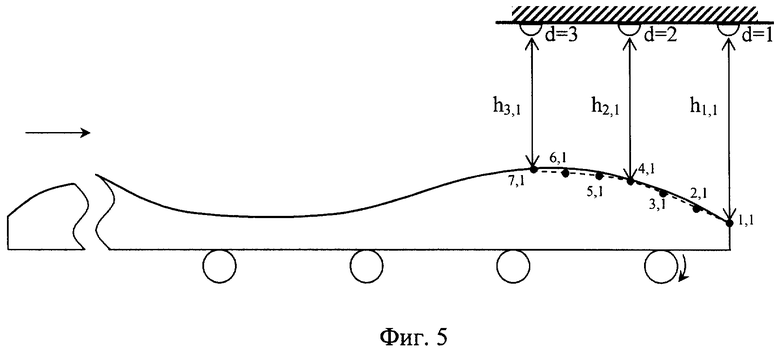
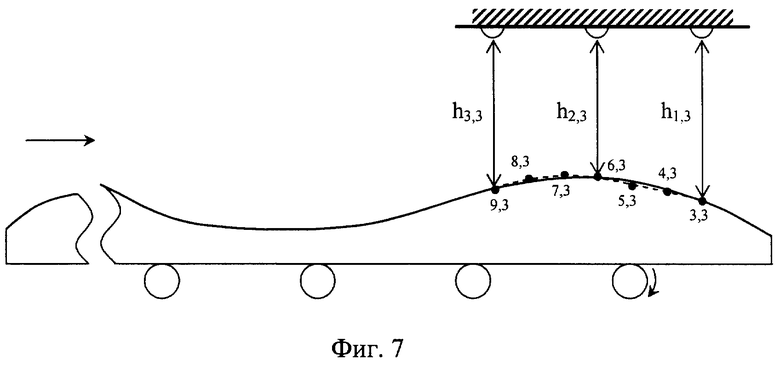
Рассмотрим пример работы оценивающего блока при следующих условиях: заявленное устройство содержит три радиочастотных датчика (d=1, 2, 3); расстояние между соседними датчиками b=0,75 м; шаг дискретизации Δ=0,25 м (в зоне контроля трехдатчиковой системы одновременно находится семь отсчетов рельса); длина рельса L=25 м; длина базы l=1,5 м (s=3).
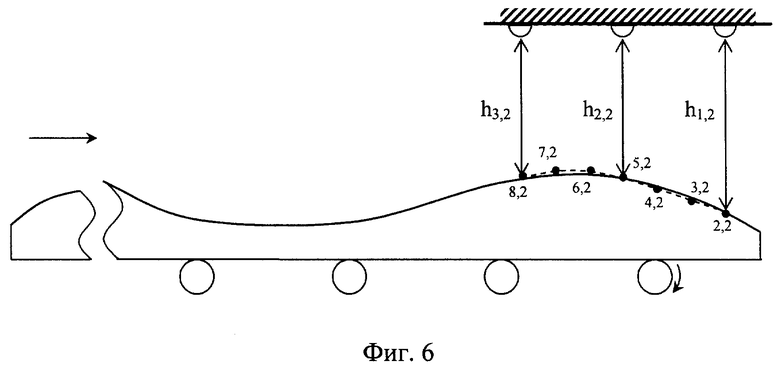
В момент времени, когда рельс впервые оказывается в зоне контроля всех трех радиочастотных датчиков, сигнал датчиков попадает на вход блока 14 расчета коэффициентов сплайна, где по формуле (1) вычисляются коэффициенты двух кубических сплайн-функций, которые интерполируют отсчеты между сигналами первого h1(i) и второго h2(i) датчиков, затем второго h2(i) и третьего h3(i) датчиков, после чего, по формуле (2), в блоке 15 оценки локального профиля, вычисляют оценки  локального профиля. На фиг.5, 6 и 7 графически изображены схемы работы блока 13 сплайн-интерполяции, где отражены три последовательных положения рельса с указанием соответствующих точек контроля.
локального профиля. На фиг.5, 6 и 7 графически изображены схемы работы блока 13 сплайн-интерполяции, где отражены три последовательных положения рельса с указанием соответствующих точек контроля.
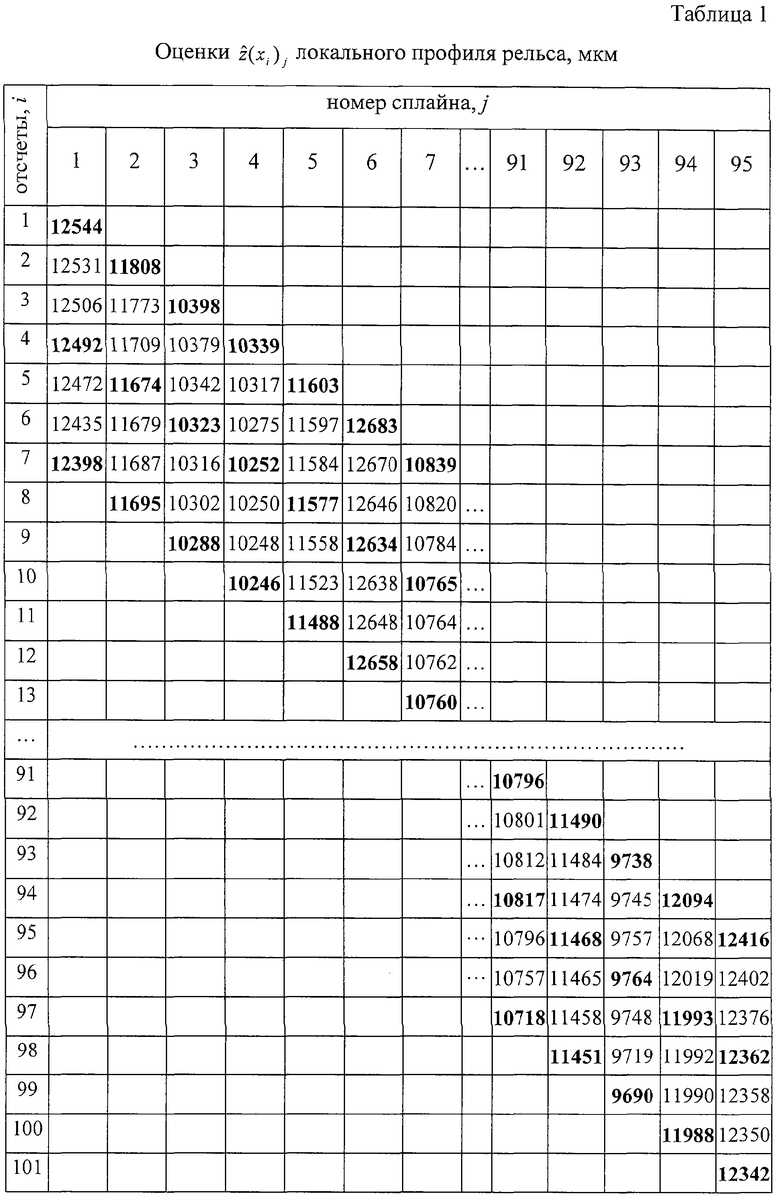
Оценки  локального профиля сохраняются в первом блоке памяти 16 в виде массива, часть которого приведена в таблице1. Полужирным шрифтом изображены измеренные оценки
локального профиля сохраняются в первом блоке памяти 16 в виде массива, часть которого приведена в таблице1. Полужирным шрифтом изображены измеренные оценки  (в узлах интерполяции).
(в узлах интерполяции).
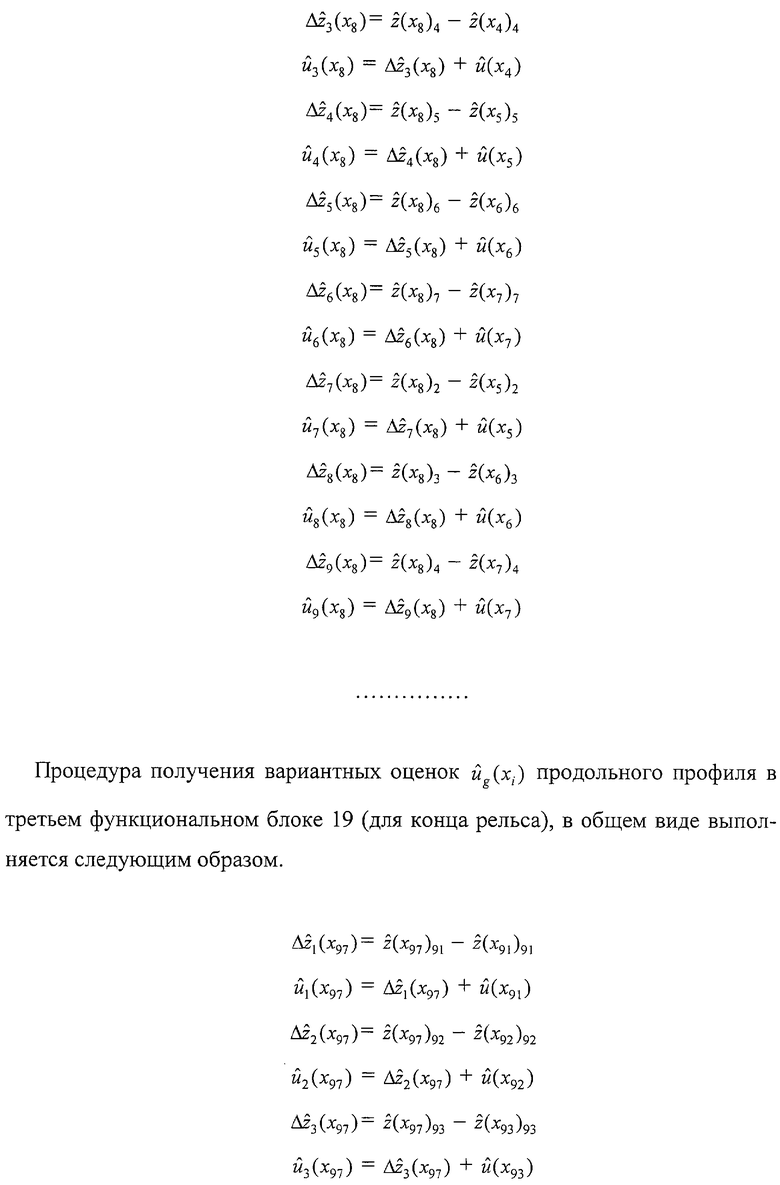
Процедура получения вариантных оценок  продольного профиля в первом функциональном блоке 17 (для начала рельса) в общем виде выполняется следующим образом.
продольного профиля в первом функциональном блоке 17 (для начала рельса) в общем виде выполняется следующим образом.
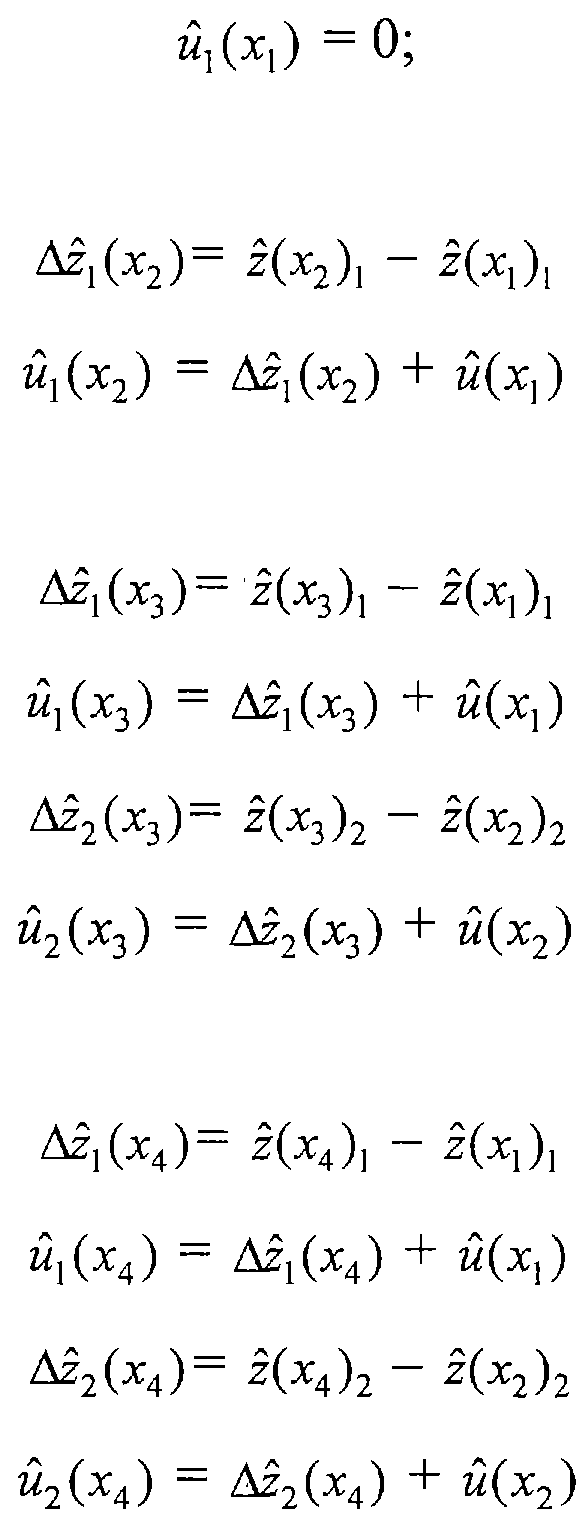

Процедура получения вариантных оценок  продольного профиля во втором функциональном блоке 18 (для середины рельса), в общем виде выполняется следующим образом.
продольного профиля во втором функциональном блоке 18 (для середины рельса), в общем виде выполняется следующим образом.
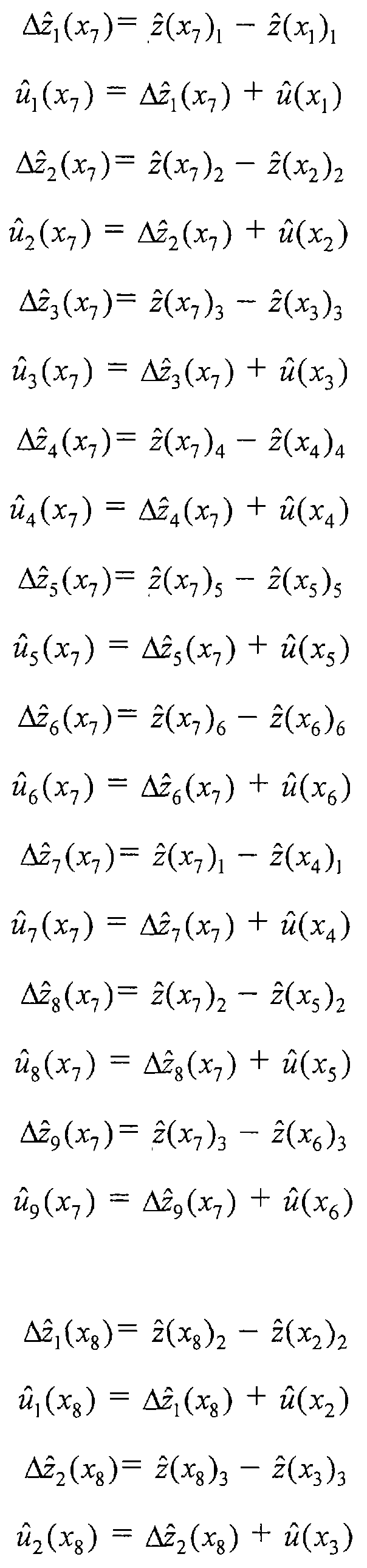
После вычисления всех вариантных оценок  продольного профиля для текущего дискретного пространственного отсчета i рельса в блоке 27 усреднения, рассчитывается оценка
продольного профиля для текущего дискретного пространственного отсчета i рельса в блоке 27 усреднения, рассчитывается оценка  продольного профиля для текущего дискретного пространственного отсчета i рельса. Для седьмого пространственного дискретного отсчета рельса оценка продольного профиля вычисляется по формуле (5):
продольного профиля для текущего дискретного пространственного отсчета i рельса. Для седьмого пространственного дискретного отсчета рельса оценка продольного профиля вычисляется по формуле (5):

Полученные оценки  продольного профиля рельса сохраняются в блоке 28 памяти. Оценки
продольного профиля рельса сохраняются в блоке 28 памяти. Оценки  продольного профиля по мере продвижения рельса через зону контроля попадают на вход блока 29 оценки местных прогибов, где рассчитывается оценка
продольного профиля по мере продвижения рельса через зону контроля попадают на вход блока 29 оценки местных прогибов, где рассчитывается оценка  местных прогибов. Для седьмого пространственного дискретного отсчета рельса оценка местных прогибов вычисляется по формуле (6):
местных прогибов. Для седьмого пространственного дискретного отсчета рельса оценка местных прогибов вычисляется по формуле (6):
Полученные оценки  местных прогибов сохраняется в блоке 30 памяти.
местных прогибов сохраняется в блоке 30 памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ РЕЛЬСОВ | 1998 |
|
RU2151705C1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1997 |
|
RU2116669C1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1998 |
|
RU2140099C1 |
| УСТРОЙСТВО РАДИОНАВИГАЦИОННОГО ОПРЕДЕЛЕНИЯ ПЛАНОВЫХ КООРДИНАТ | 2005 |
|
RU2291457C1 |
| ИНТЕРПОЛЯТОР | 1997 |
|
RU2120137C1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1999 |
|
RU2165099C2 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1997 |
|
RU2116668C1 |
| СПЛАЙН-ИНТЕРПОЛЯТОР | 1998 |
|
RU2132567C1 |
| ИНТЕРПОЛЯТОР | 1997 |
|
RU2127902C1 |
| УСТРОЙСТВО И СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КРИВИЗНЫ ДЛИННОМЕРНОГО ОБЪЕКТА | 2009 |
|
RU2439487C2 |
Изобретение относится к измерительной технике и может быть использовано для обработки сигнала при бесконтактном измерении отклонений рельса в одной или нескольких плоскостях от прямой линии. Задачей, на решение которой направлено данное изобретение, является получение достоверных оценок как продольного профиля рельса, так и местных прогибов относительно базы любой заданной длины, включая концевые участки. Устройство для контроля прямолинейности рельсов содержит механическую часть для крепления измерительных датчиков, механизмы перемещения рельса через зону контроля, импульсные датчики пути на входе и выходе измерительной установки, не менее трех радиочастотных датчиков для бесконтактного измерения расстояния до поверхности рельса в каждой из контролируемых плоскостей, маркеры для автоматической разбраковки продукции, операционный блок и оценивающий блок, состоящий из блока вычисления коэффициентов сплайнов, блока оценки локального профиля, первого блока памяти, первого, второго и третьего блоков вычитания, первого, второго и третьего сумматоров, второго блока памяти, блока усреднения, третьего блока памяти, блока оценки местных прогибов и четвертого блока памяти, соответствующим образом соединенных между собой. 7 ил. 1 табл.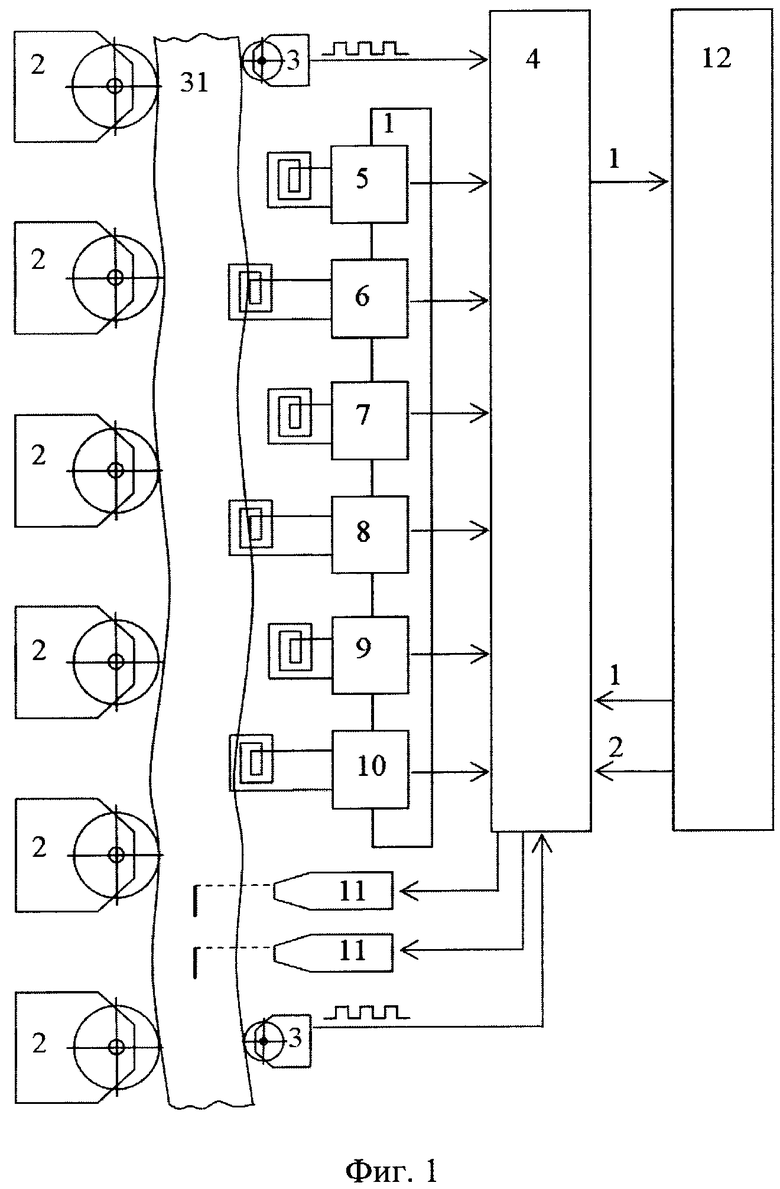
Устройство для контроля прямолинейности рельсов, содержащее механическую часть для крепления измерительных датчиков, механизмы перемещения рельса через зону контроля, импульсные датчики пути на входе и выходе измерительной установки, не менее трех радиочастотных датчиков для бесконтактного измерения расстояния до поверхности рельса в каждой из контролируемых плоскостей, маркеры для автоматической разбраковки продукции, операционный блок, который оценивает величину зазоров между радиочастотными датчиками и рельсом на основании сигналов измерительной информации, полученных от радиочастотных датчиков, осуществляет разбраковку рельсов, а также осуществляет управление маркерами и соответствующие входы которого соединены с выходами импульсных датчиков и радиочастотных датчиков, а также соответствующие выходы соединены с входами маркеров, отличающееся тем, что в него введен оценивающий блок, который оценивает продольный профиль и местные прогибы рельса в зависимости от величины зазоров между неподвижными радиочастотными датчиками и контролируемыми поверхностями рельса, используя сплайн-интерполяцию для вычисления оценок локальных профилей и процедуру последовательной сшивки оценок локальных профилей, в состав которого входят блок сплайн-интерполяции, состоящий из блока вычисления коэффициентов сплайнов, вход которого соединен с соответствующим выходом операционного блока и из блока оценки локального профиля, вход которого соединен с выходом блока вычисления коэффициентов сплайна, выход блока оценки локального профиля соединен с входом первого блока памяти, соответствующие выходы которого соединены с входами первого, второго и третьего блока вычитания, выходы первого, второго и третьего блока вычитания соединены с входами соответственно, первого, второго и третьего сумматора, при этом первые блок вычитания и сумматор входят в состав первого функционального блока, вторые блок вычитания и сумматор входят в состав второго функционального блока и третьи блок вычитания и сумматор входят в состав третьего функционального блока, соответствующие входы второго блока памяти соединены с выходами первого, второго и третьего сумматора, выход второго блока памяти соединен с входом блока усреднения, соответствующие выходы которого через третий блок памяти соединены с соответствующими входами первого, второго, третьего сумматоров, блока оценки местных прогибов и операционного блока, выход блока оценки местных прогибов соединен с входом четвертого блока памяти, выход которого соединен с соответствующим входом операционного блока.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ РЕЛЬСОВ | 1998 |
|
RU2151705C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ, СКРУЧЕННОСТИ И РАЗНОВЫСОТНОСТИ РЕЛЬСОВ | 2000 |
|
RU2199459C2 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| ОПТИЧЕСКИЙ ПРОЕКЦИОННЫЙ ЭКРАН | 1994 |
|
RU2077822C1 |

