Описание изобретения
Изобретение относится к области измерительной техники и может быть использовано для автоматизированного контроля кривизны различных длинномерных объектов, например, относящихся к продукции прокатных и трубных производств, в технологическом потоке.
Известно устройство для контроля геометрических размеров рельса (описание изобретения к патенту РФ №2314953, кл. B61K 9/08, E01B 35/00, 2006 г.), включающее в себя измерительную платформу, на которой установлены шесть оптических датчиков, три из которых контролируют верхнюю поверхность, три - боковую поверхность, в начале, центре и конце рельса. Основным недостатком данного устройства является то, что для проведения измерений необходимо произвести "заневоливание" объекта, отсюда следует вывод о невозможности проведения измерений в технологическом потоке без снижения темпа работы.
Также известно устройство для контроля прогиба рельса (описание изобретения к патенту РФ №2333858, кл. B61K 9/08, E01B 35/02, 2005 г.), включающее в себя измерительную платформу, на которой установлены три оптических датчика, контролирующих рельс в его начале, конце и середине, в одной плоскости. Это устройство работает на теневом принципе оптических измерений. Недостатком является то, что существуют ограничения на поперечный размер объекта: он должен быть меньше, чем используемый осветитель. Кроме того, нет возможности измерения кривизны объекта на всей длине.
Также в вышеперечисленных устройствах отсутствует возможность контроля кривизны объекта на базовом участке длины объекта, например на 1 метре, еще одним недостатком является то, что данные устройства предназначены для проведения измерений объектов, имеющих постоянную длину.
Известно устройство для контроля радиуса кривизны поверхности (описание изобретения к патенту США №20080289205, кл. G01B 3/16, G01B 3/00, G01C 3/08, G01S 3/80, 2008 г.), состоящее из основания с закрепленными на нем бесконтактными сенсорами измерения расстояния между сенсором и измеряемой поверхностью. Данное устройство по показаниям сенсоров производит расчет радиуса кривизны. Описанное устройство может применяться для измерения кривизны движущегося длинномерного объекта, при этом для построения общей карты кривизны поверхности необходимо складывать одиночные измерения. При этом общая погрешность измерения на всю длину объекта сложится из погрешностей одиночных измерений. Таким образом, общая погрешность измерения кривизны объекта увеличивается при увеличении длины измеряемого объекта, что является недостатком указанного устройства.
Наиболее близким к предлагаемому изобретению является устройство для контроля прямолинейности рельсов (описание изобретения к патенту РФ №2283792, кл. B61K 9/08, G01B 15/04, 2004 г.), выбранное в качестве прототипа. Устройство содержит не менее трех радиочастотных датчиков для бесконтактного измерения расстояния до поверхности рельса. Оценка кривизны происходит в зависимости от величины зазоров между неподвижными радиочастотными датчиками и контролируемыми поверхностями рельса, используя сплайн-интерполяцию.
Недостатком известного устройства является низкая точность определения величины кривизны, рассчитываемая с помощью сплайн-интерполяции. Для достижения точности, приемлемой при контроле проката, необходимо увеличивать количество используемых датчиков, что одновременно ведет к увеличению времени расчета значений кривизны.
Целью изобретения является устранение указанных недостатков, повышение точности и надежности измерения, сокращение числа датчиков при измерении длинномерных объектов, минимизация затрат на внедрение и последующее обслуживание, повышение качества продукции, проведение измерений кривизны объекта на заданный участок длины (например, 1 м) и на всю длину с одинаковой погрешностью.
Предложенные устройство и способ измерения кривизны длинномерных объектов устраняет описанные недостатки, позволяет проводить измерения кривизны в условиях вибрации и поперечного смещения движущегося объекта и позволяет минимизировать количество задействованных датчиков.
Устройство и способ измерения кривизны длинномерных объектов предназначены для использования при измерении кривизны на базовом расстоянии (длиной 2t), например на 1 метре, и максимальной кривизны на всей длине объекта. Основой измерений являются датчики расстояния до объекта, закрепленные на неподвижном основании. В качестве датчиков могут применяться датчики различного типа: оптические, индуктивные, емкостные, лазерные и т.п. Показания датчиков поступают в блок анализа и обработки информации, в котором и производится последующий расчет. Условие измерений - прямолинейное движение объекта. Могут присутствовать отклонения при движении в виде поперечных смещений и вибрации.
Кроме того, для привязки измерений к длине и составления карты кривизны объекта используются показания датчика скорости, который может быть оптического или механического типа.
Пространственно размещение датчиков показано на фиг.1.
Измерения проводятся в плоскости, проходящей через ось объекта. В случае необходимости проведения измерения кривизны объекта в двух перпендикулярных осях, устанавливается дополнительный ряд датчиков под углом 90 градусов к первому ряду.
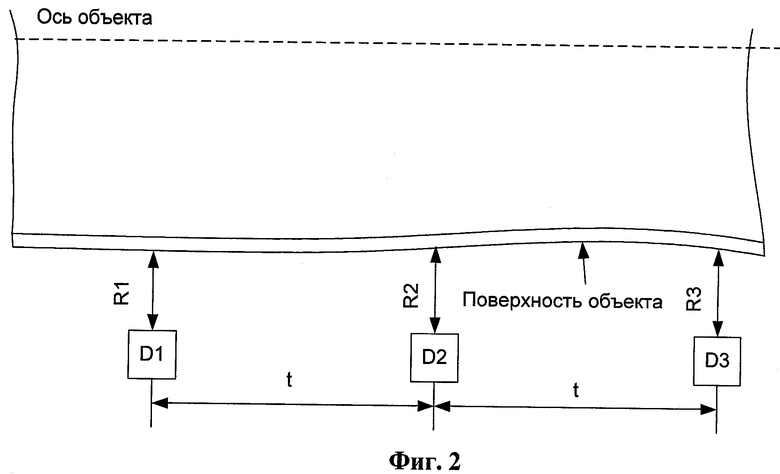
Для измерения кривизны объекта на базовом расстоянии длиной 2t используются три датчика расстояния до объекта D1, D2, D3, расположенные последовательно вдоль движения объекта на расстояниях t друг от друга, фиг.2. Датчики производят синхронное измерение расстояний до поверхности объекта R1, R2, R3 во время движения.
Измерение кривизны на длину 2t (базовая кривизна) является относительным и определяется как
CUR=R2-(R1+R3)/2
Привязка измеренной кривизны на базовую длину 2t к скорости объекта, получаемой от измерителя скорости, позволяет, после выхода объекта из зоны измерения, создать карту кривизны объекта. Таким образом, производится измерение кривизны на длину 2t в каждой точке объекта.
Одновременно по вышеописанному методу производятся замеры кривизны тройками датчиков D1, D3, D4 - на длину 4t, D1, D4, D5 - на длину 8t и т.д.
Таким образом, после выхода объекта из зоны измерения будет известна кривизна в каждой точке объекта в плоскости измерения в нескольких масштабах измерения. Это позволяет построить карту кривизны трубы со 100% покрытием измерений. Анализ карты кривизны позволяет определить максимальную кривизну как на базовой длине, так и кривизну, приходящуюся на всю длину объекта.
Блок анализа и обработки информации выполняет алгоритм построения карты кривизны объекта по следующим шагам.
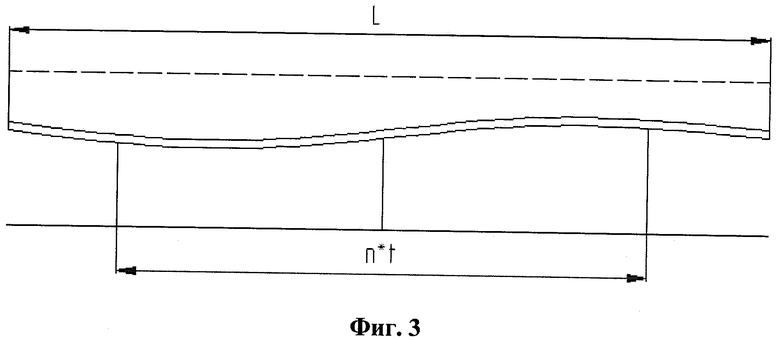
1. Выбирается замер кривизны в масштабе, максимально перекрывающем объект по длине, центральное значение которого соответствует центру объекта (см. фиг.3). Абсолютные значения выбранного замера вносятся в результирующую карту кривизны объекта и считаются опорными. Дальнейшее построение карты будет производиться относительно опорных точек.
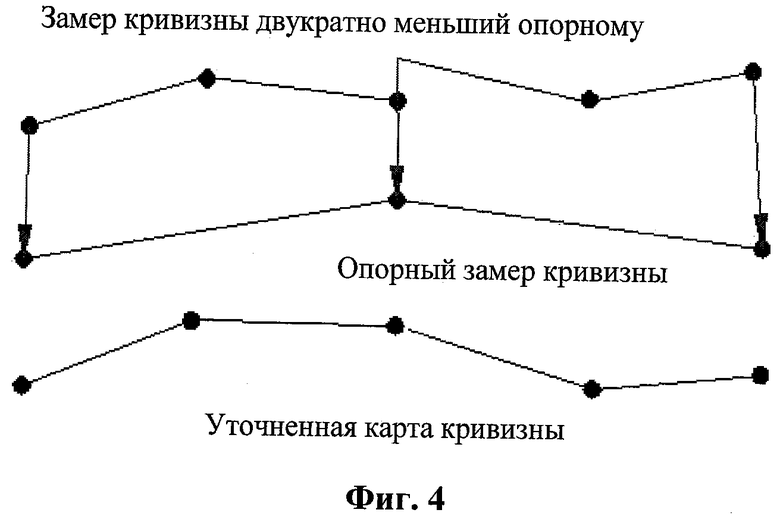
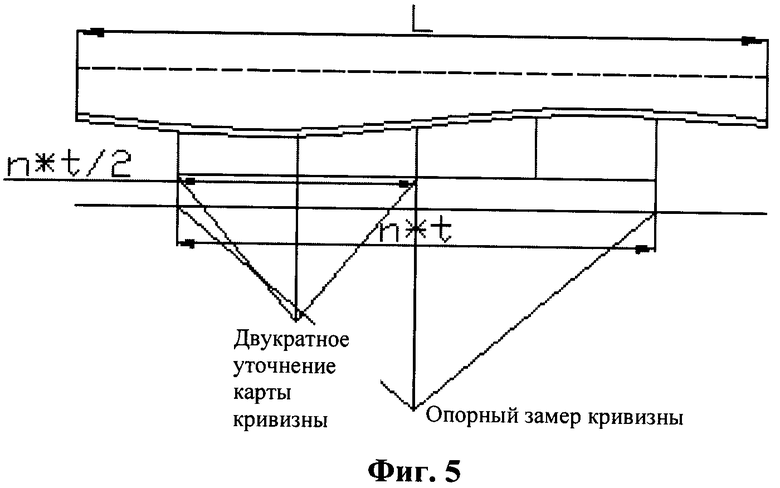
2. Производится поиск замера кривизны (из полученных значений) в масштабе в два раза меньше опорного, такого, что боковые точки измерения сходятся (привязка по длине) с крайней и центровой точками опорного замера. Абсолютные значения точек найденного замера геометрически сводятся с опорным замером кривизны таким образом, чтобы координаты боковых точек совпали с координатами боковой и центральной точек опорного замера (см. фиг.4). В результате операции получаем новую координату центральной точки найденного замера, с привязкой к опорному замеру кривизны, и двукратное уточнение итоговой карты кривизны (см. фиг.5).
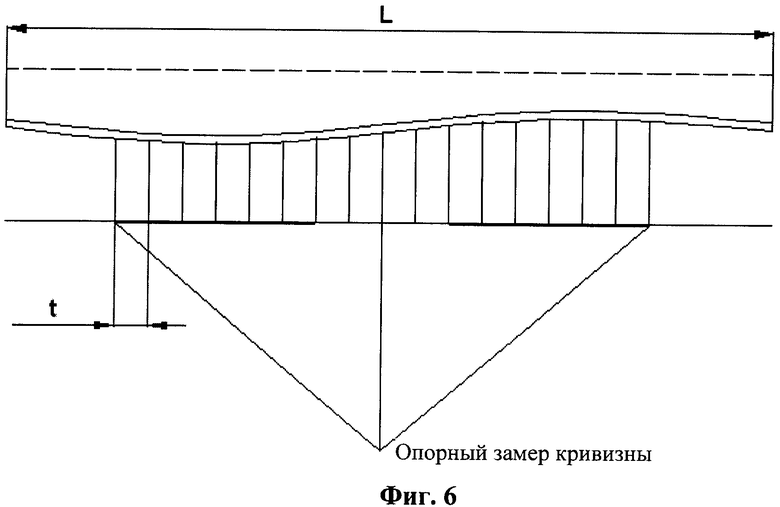
3. Операция уточнения карты кривизны рекурсивно производится до расстояния t (см. фиг.6).
4. Построение карты кривизны за краями опорного замера производится методом наращивания разницы между абсолютными замерами, произведенными в один момент времени с датчиков, расположенных на расстояниях t, 2t, 4t, 8t и т.д. (см. фиг.7).
5. На концевые участки объекта, которые не охватываются одним приращением, производится повторное приращение. Датчики расположены таким образом, что максимально требуемое количество приращений равняется двум.
В результате вышеперечисленных операций получаем полную карту кривизны, без воздействий вибрации и смещений, по которой рассчитывается максимальная кривизна объекта, приходящаяся на всю длину.
Новизна изобретения заключается в расположении датчиков на расстояниях, позволяющих уменьшить их общее количество - для одновременного измерения кривизны объекта на всю длину и на базовое расстояние 2t нет необходимости устанавливать L/t датчиков (при длине объекта L). Достаточное количество составит log2(L/t)+2 датчиков. При этом погрешность измерения останется неизменной при любой длине объекта измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2020 |
|
RU2740485C1 |
| Способ измерения радиуса кривизны длинномерной трубы и устройство для его осуществления (варианты) | 2021 |
|
RU2790885C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОГИБА РЕЛЬСА | 2005 |
|
RU2333858C2 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТУННЕЛЕЙ | 2006 |
|
RU2325618C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ РЕЛЬСА | 2005 |
|
RU2314953C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| Устройство для контроля контактов реле | 1986 |
|
SU1464736A1 |
| СПОСОБ ТЕКУЩЕГО СОДЕРЖАНИЯ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2466235C2 |
| СПОСОБ ДЛЯ КОНТРОЛЯ РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2419567C1 |

Изобретение относится к области измерительной техники и может быть использовано для автоматизированного контроля кривизны различных длинномерных объектов, например, относящихся к продукции прокатных и трубных производств, в технологическом потоке. Сущность: устройство и способ предназначены для использования при измерении кривизны на определенную базовую длину объекта (2t), например на 1 погонный метр, и максимальной кривизны на всю длину объекта. Основой измерений являются датчики расстояния до объекта. Условие измерений - прямолинейное движение объекта. Могут присутствовать отклонения при движении в виде поперечных смещений и вибрации. Для привязки измерений к длине и составления карты кривизны объекта используется датчик скорости. Достаточное количество датчиков составит log2(L/t)+2 датчиков. Датчики расположены между собой на расстояниях (t, t, 2t, 4t, 8t, 16t…), где t - половина базового расстояния для измерения кривизны. Технический результат: устройство позволяет уменьшить количество задействованных датчиков при измерении кривизны - для одновременного измерения кривизны объекта на всю длину и на базовое расстояние длиной 2t нет необходимости устанавливать L/t датчиков (при длине изделия L). 2 н.п. ф-лы, 7 ил.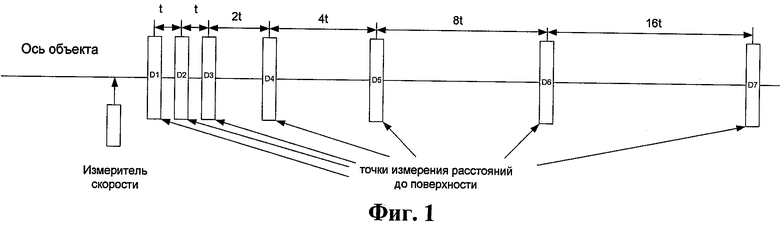
1. Способ измерения кривизны длинномерного объекта, заключающийся в том, что для измерения кривизны на базовом продольном участке объекта длиной 2t и максимальной кривизны на всю длину объекта используются датчики (оптические, индуктивные, емкостные, лазерные и т.п.) расстояний до объекта, отличающийся тем, что датчики расположены между собой на расстояниях (t, t, 2t, 4t, 8t, 16t…), где t - половина базового расстояния для измерения кривизны и требует для своей реализации log2(L/t)+2 датчиков, где L - длина объекта; t - половина базового расстояния.
2. Устройство для измерения кривизны длинномерного объекта, содержащее датчики расстояния до объекта (оптические, индуктивные, емкостные, лазерные и т.п.), отличающееся тем, что требует для своей реализации датчики в количестве log2(L/t)+2, где L - длина объекта; t - половина базового расстояния, при этом датчики расположены вдоль объекта на расстояниях между собой (t, t, 2t, 4t, 8t, 16t…), где t - половина базового расстояния для измерения кривизны, при этом устройство дополнительно содержит измеритель скорости объекта и блок анализа и обработки информации.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ РЕЛЬСОВ | 2004 |
|
RU2283792C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ РЕЛЬСОВ | 1998 |
|
RU2151705C1 |
| DE 19725726 A1, 28.01.1999. | |||

