Изобретение относится к электротехнике и может быть использовано для управления быстродействующими электромагнитными приводами различных устройств для улучшения их динамических характеристик.
Известен способ управления электромагнитным приводом вибрационного движения, где в качестве источника питания постоянного тока используют блок питания постоянного тока в виде источника питания постоянного тока ограниченной мощности и накопителя энергии, перед подключением силовой обмотки электромагнита к блоку питания осуществляют накопление энергии посредством накопителя энергии до уровня, соответствующего импульсу силы электромагнита и обеспечивающего проведение заданного числа рабочих циклов рабочего органа, а повторное подключение силовой обмотки электромагнита к блоку питания после перемещения рабочего органа в обратном направлении осуществляют при уровне энергии, накопленной в накопителе энергии, обеспечивающей перемещение рабочего органа (патент №2147941, Россия, 2000 г.).
Недостатком данного способа является то, что регулируется только энергия ударного импульса, а не закон перемещения якоря электромагнита, а также невозможность обеспечить безударное включение электромагнита и контролировать закон его движения.
Известен способ управления электромагнитом, когда для регулирования закона движения якоря в течение времени форсировки на обмотку электромагнита подается постоянное во времени напряжение источника, а по истечении этого времени напряжение подается лишь периодически с определенной частотой, т.е. импульсы напряжения, питающего электромагнит, широтно-модулированные («Электрические аппараты» Межвуз. сб. науч. тр. Чебоксары: Изд-во Чувашского ун-та, 1998, 299 с).
Недостатком данного способа является невозможность формирования требуемого в некоторых случаях закона изменения тока (а значит, и магнитодвижущей силы), т.к. постоянная времени обмотки не позволяет обеспечить нужную скорость уменьшения тока.
Задачей данного изобретения является формирование заданного закона изменения тока в катушке, необходимого для обеспечения безударного срабатывания электромагнита, при сохранении требуемых динамических характеристик устройства.
Поставленная задача решается с помощью заявленного способа управления быстродействующим электромагнитом, включающего формирование широтно-модулированных импульсов напряжения, подаваемых на электромагнит, и регулирование скорости движения якоря, при этом импульсы напряжения двухполярные, а для обеспечения закона движения с минимальной скоростью в конце хода якоря используется закон изменения магнитодвижущей силы обмотки во времени (F(t)), который формируется системой управления методом широтно-импульсной модуляции напряжения, подаваемого на обмотку электромагнита путем вычитания противодействующей характеристики, действующей на якорь электромагнита, из расчетной силовой характеристики, необходимой для обеспечения заданного закона движения якоря, и затем последующим восстановлением из полученной разности и статических тяговых характеристик электромагнита необходимой зависимости для магнитодвижущей силы (F(t)).
Способ осуществляется следующим образом: на обмотку электромагнита подаются широтно-модулированные импульсы напряжения, длительность и полярность которых меняется таким образом, чтобы обеспечить изменение магнитодвижущей силы обмотки (F) во времени по заданному закону, т.е. нарастание F достигается увеличением ширины подаваемого импульса, а снижение - увеличением паузы между импульсами или изменением полярности напряжения, подаваемого на обмотку, на противоположную. Структурно-функциональная схема устройства управления, реализующего данный способ управления, представлена на фиг.1, на котором: МК - микроконтроллер, формирующий сигнал управления, СБ - силовой блок, к которому подключена непосредственно обмотка электромагнита, ЭМ - управляемый электромагнит.
Для требуемого закона перемещения якоря электромагнита во времени (x(t)) и связанного с ним исполнительного механизма можно теоретически рассчитать необходимый закон изменения действующей силы от перемещения (Р(х)). Вычитая из последней зависимость противодействующего усилия от перемещения (Рпр(х)) исполнительного механизма, получим расчетную зависимость электромагнитной силы, которую должен обеспечить электромагнит. Зная семейство зависимостей электромагнитного усилия от перемещения и магнитодвижущей силы (Рэм(х, F)), по фиксированным значениям Рэм(х, F) и x(t) можно определить необходимую характеристику изменения МДС обмотки от времени.
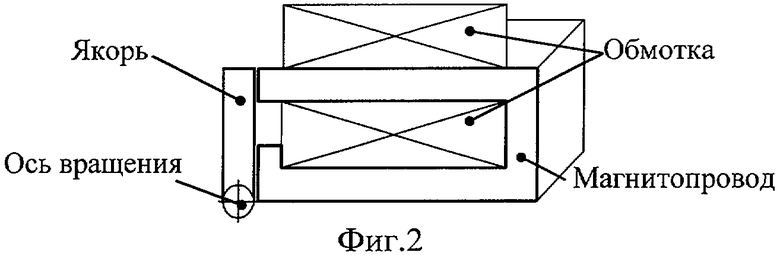
Для быстродействующих электромагнитов с внешним вращающимся якорем закон изменения МДС обмотки определяется аналогично. При этом перемещение якоря во времени определяется углом поворота ϕ(t), а силовые характеристики задаются соответствующими моментами Мэм(ϕ, F) и Мпр(ϕ), действующими на якорь.
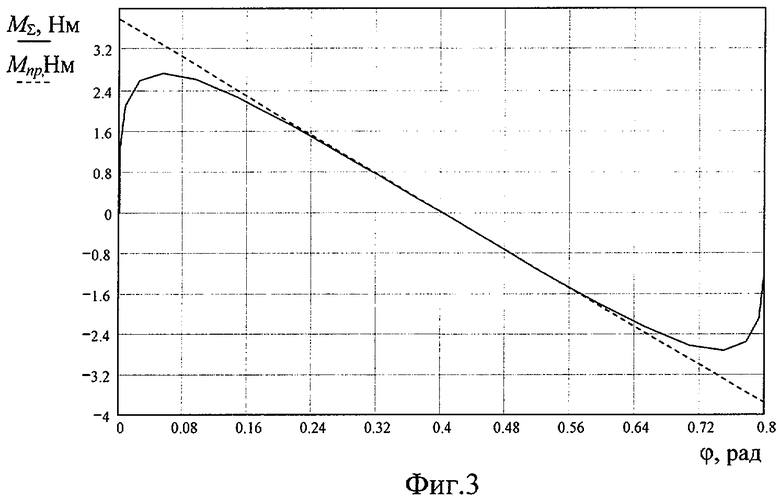
Рассмотрим на примере ЭМ (фиг.2) алгоритм определения необходимой зависимости для магнитодвижущей силы обмотки управления. Пусть электромагнит должен обеспечивать время срабатывания не более 2 мс, при этом скорость якоря в конце хода не должна превышать 0,02 рад/мс. Общий момент инерции якоря и подвижных частей исполнительного механизма составляет 2,1 г·см2, а характеристика противодействующего момента Мпр(ϕ) представлена на фиг.3 пунктирной линией.
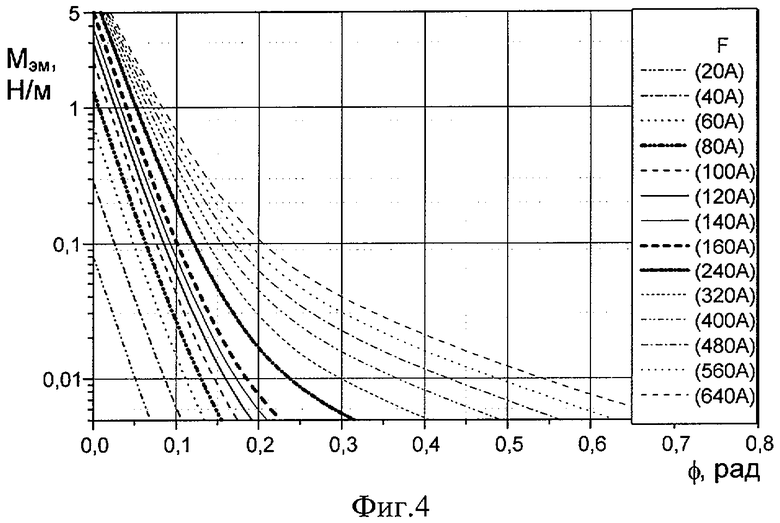
Семейство статических тяговых характеристик электромагнита Мэм(ϕ,F), представленных в виде зависимостей момента от МДС обмотки для различных углов поворота якоря ϕ, представлено на фиг.4.
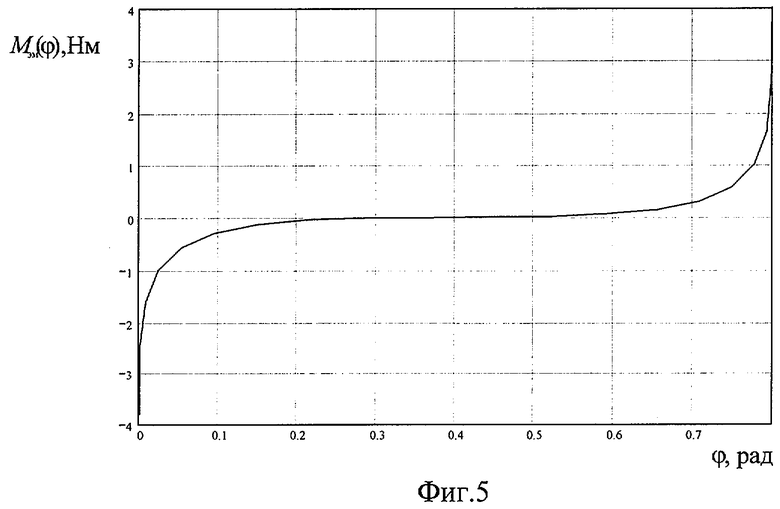
Расчетная характеристика момента, действующего на якорь М(ϕ) и обеспечивающая необходимый закон перемещения последнего ϕ(t), приведена на фиг.3 сплошной линией. Вычитая из характеристики М(ϕ) зависимость Мпр(ϕ), получим расчетную зависимость электромагнитного момента Мэм(ϕ), которую должен обеспечить электромагнит (фиг.5).
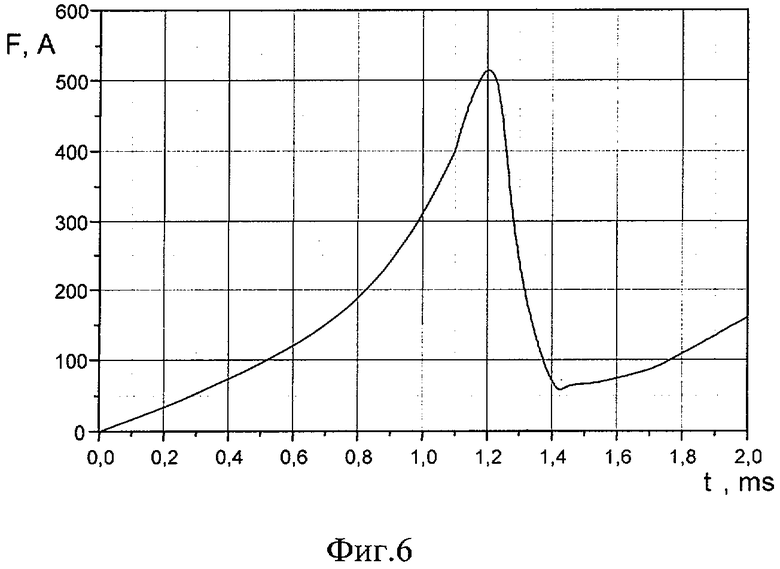
Таким образом, в каждый момент времени t известны значения Мэм(ϕ) и ϕ(t), следовательно, по этим значениям из зависимости Мэм(ϕ,F) можно восстановить необходимый закон изменения МДС обмотки F(t). Вид полученной таким образом зависимости F(t) для быстродействующего электромагнита фиг.2 представлен на фиг.6. Временные зависимости угла поворота якоря ϕ(t) и его угловой скорости  показаны на фиг.7.
показаны на фиг.7.
Система управления электромагнитом формирует последовательность широтно-модулированных импульсов напряжения, подаваемого на обмотку электромагнита так, чтобы обеспечить изменение МДС обмотки согласно полученной зависимости F(t).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИЛОВЫМ ЭЛЕКТРОМАГНИТОМ | 2023 |
|
RU2815914C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2018 |
|
RU2707645C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВЫРУБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ОБУВИ | 2009 |
|
RU2424110C1 |
| КОМБИНИРОВАННЫЙ РОТОР ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2014 |
|
RU2575920C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ИМПЛАНТИРУЕМОГО РОТАЦИОННОГО ЭЛЕКТРОНАСОСА КАРДИОПРОТЕЗА С ОБЕСПЕЧЕНИЕМ СВОЙСТВА ЖИВУЧЕСТИ (ВАРИАНТЫ) | 2013 |
|
RU2525300C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2019 |
|
RU2713305C1 |
| ЭЛЕКТРОМАГНИТ | 1996 |
|
RU2115185C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2636052C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |

Изобретение относится к области электротехники и может быть использовано для управления электромагнитными приводами различных устройств. Техническим результатом является обеспечение безударного включения электромагнита. Способ управления быстродействующим электромагнитом включает формирование широтно-модулированных импульсов напряжения, подаваемых на электромагнит, и регулирование скорости движения якоря, при этом импульсы напряжения двухполярные. 7 ил.
Способ управления быстродействующим электромагнитом, включающий формирование широтно-модулированных импульсов напряжения, подаваемых на электромагнит, и регулирование скорости движения якоря, отличающийся тем, что импульсы напряжения двухполярные.
| АХАЗОВ И.З | |||
| и др | |||
| Форсированное управление электромагнитом пускателя для электроподвижного транспорта | |||
| Сборник «Электрические аппараты» | |||
| Чувашский университет им | |||
| И.Н.Ульянова, 1998, с.182-191 | |||
| ВРЕМЯ-ИМПУЛЬСНЫЙ ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 0 |
|
SU374621A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 1997 |
|
RU2143761C1 |
| Способ управления электромагнитом | 1987 |
|
SU1649514A1 |
| US 6648297 А, 18.11.2003 | |||
| US 5214558 А, 25.05.1993. | |||

