Изобретение относится к области электротехники, а именно к компрессорной технике, приводимой в действие силовыми электромагнитами возвратно-поступательного движения, применяемой в нефтегазовой промышленности.
В авторском свидетельстве SU 1607021 (МПК H01F 7/18, опубл. 15.11.1990) описано устройство, позволяющее управлять электромагнитом. Согласно изобретению в непосредственной близости от рабочего зазора между якорем и статором электромагнита установлен магнитодиод, на который оказывает воздействие магнитный поток выпучивания между статором и якорем электромагнита. По мере уменьшения рабочего воздушного зазора электромагнита, вследствие движения якоря, магнитный поток выпучивания уменьшается, что приводит к снижению сопротивления магнитодиода, что, в свою очередь, согласно схеме его включения, приводит к уменьшению скважности электрического напряжения подаваемого на обмотки электромагнита. Таким образом, формируется максимальная скважность подаваемого на электромагнит напряжения при максимальном рабочем зазоре между статором и якорем электромагнита и наоборот, тем самым снижая электромагнитное усилие в конце хода якоря.
Недостатком является нелинейная зависимость интенсивности магнитного потока выпучивания между статором и якорем электромагнита, в зависимости от величины рабочего зазора, что обуславливает относительно высокую сложность настройки работы предлагаемой в патенте схемы питания электромагнита при ее практической реализации.
Регулирование хода якоря в реверсивном линейном приводе известно из патента RU 2373623 (МПК H02K 33/16, F04B 35/04, опубл. 20.11.2009). Якорь реверсивного линейного привода с обмоткой возбуждения под действием магнитного поля обмотки возбуждения совершает линейное колебательное движение в осевом направлении с заданным ходом (Н). Предусмотрены средства для определения текущего положения (х) якоря, средства для измерения текущего значения тока (Iist) обмотки возбуждения и средства для задания тока (Isoll) обмотки возбуждения, так чтобы в течение каждой полуволны движения якоря к нему подводилось ровно столько энергии, сколько нужно для получения амплитуды колебаний (+L1, -L2), соответствующей заданному ходу (Н) якоря.
Недостатком является необходимость определения промежуточного параметра - величины энергии, обеспечивающей заданную амплитуду колебаний, что вносит дополнительную погрешность, в том числе при изменении противодействующего движению якоря усилия.
Наиболее близким к заявляемому является способ управления быстродействующим электромагнитом (патент RU 2284600, МПК H01F7/18, опубл. 27.09.2006), включающий формирование широтно-модулированных импульсов напряжения, подаваемых на электромагнит, и регулирование скорости движения якоря. При этом импульсы напряжения двухполярные, а для обеспечения закона движения с минимальной скоростью в конце хода якоря используется закон изменения магнитодвижущей силы обмотки во времени (F(t)), который формируется системой управления методом широтно-импульсной модуляции напряжения, подаваемого на обмотку электромагнита путем вычитания противодействующей характеристики, действующей на якорь электромагнита, из расчетной силовой характеристики, необходимой для обеспечения заданного закона движения якоря, и затем последующим восстановлением из полученной разности и статических тяговых характеристик электромагнита необходимой зависимости для магнитодвижущей силы (F(t)).
Недостатком данного способа является необходимость использования семейства зависимостей электромагнитного усилия от координаты якоря и величины магнитодвижущей силы (потребляемого тока), представляющего собой семейство нелинейных зависимостей, что увеличивает погрешность в отработке заданной координаты якоря и требует создания относительно сложных алгоритмов управления электромагнитом, как системой с нелинейными свойствами.
Технической проблемой изобретения является разработка способа управления величиной напряжения питания электромагнита, позволяющего формировать требуемое значение тока, потребляемого электромагнитом, в зависимости от относительного расстояния между статором и якорем.
Технический результат заключается в обеспечении колебательного, безударного характера движения якоря.
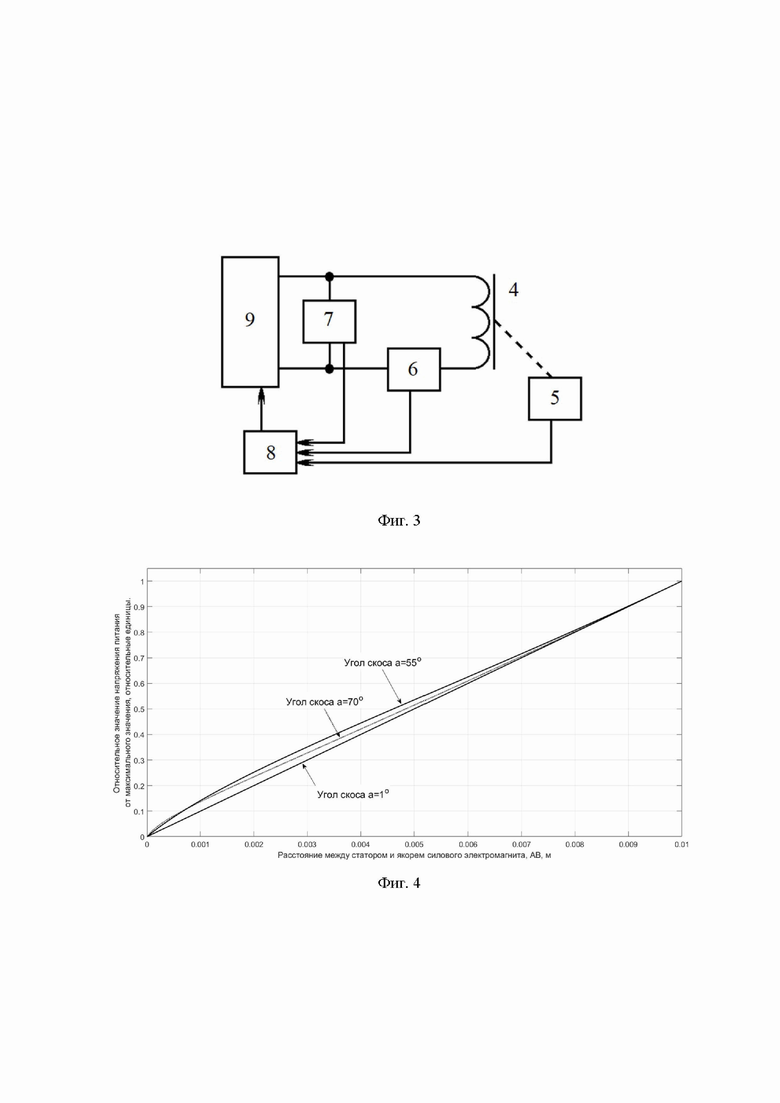
Технический результат достигается тем, что в способе управления силовым электромагнитом, включающем управление движением якоря путем изменения напряжения, согласно решению, в качестве электромагнита выбирают электромагнит осесимметричной конструкции с двумя рабочими зазорами между статором и якорем, с отличной от нуля величиной угла скоса между образующей соприкасающихся поверхностей между статором и якорем и перпендикуляром к оси симметрии магнитопровода электромагнита, определяют параметры эллипса, проходящего через точки А и Б, образованного первой осью, расположенной на отрезке EF, образованного пересечением поверхности якоря, обращенной к статору и секущей плоскостью, и второй осью, расположенной на отрезке, перпендикулярном к первой оси и проходящей через середину отрезка КМ при максимальной величине рабочего зазора между статором и якорем электромагнита, вычисляют расстояние АС от точки А, являющейся серединой отрезка ЕF, до точки С, являющейся точкой проекции середины отрезка К1М1, соответствующего отрезку КМ при произвольном относительном местоположении статора на эллипс, и изменяют величину напряжения в процессе движения якоря пропорционально расстоянию АС.
Предлагаемое изобретение поясняется чертежами: на фиг. 1 - представлена конструкция электромагнита (разрез); на фиг. 2 - приведены геометрические построения, поясняющие принцип определения требуемого значения тока, потребляемого электромагнитом, в зависимости от относительного расстояния между статором и якорем (величины рабочего воздушного зазора) в целях создания колебательного, безударного характера движения якоря; на фиг. 3 - представлена структурная схема реализации способа; на фиг. 4 - представлен пример расчета величины напряжения питания в зависимости от расстояния между статором и якорем, согласно предлагаемому способу управления.
Позициями на чертежах обозначено:
1 - якорь;
2 - статор;
3 - обмотка возбуждения магнитного поля;
4 - электромагнит;
5 - датчик местоположения якоря;
6 - датчик тока;
7 - датчик напряжения;
8 - пропорционально-интегрально-дифференциальный регулятор;
9 - управляемый источник питания.
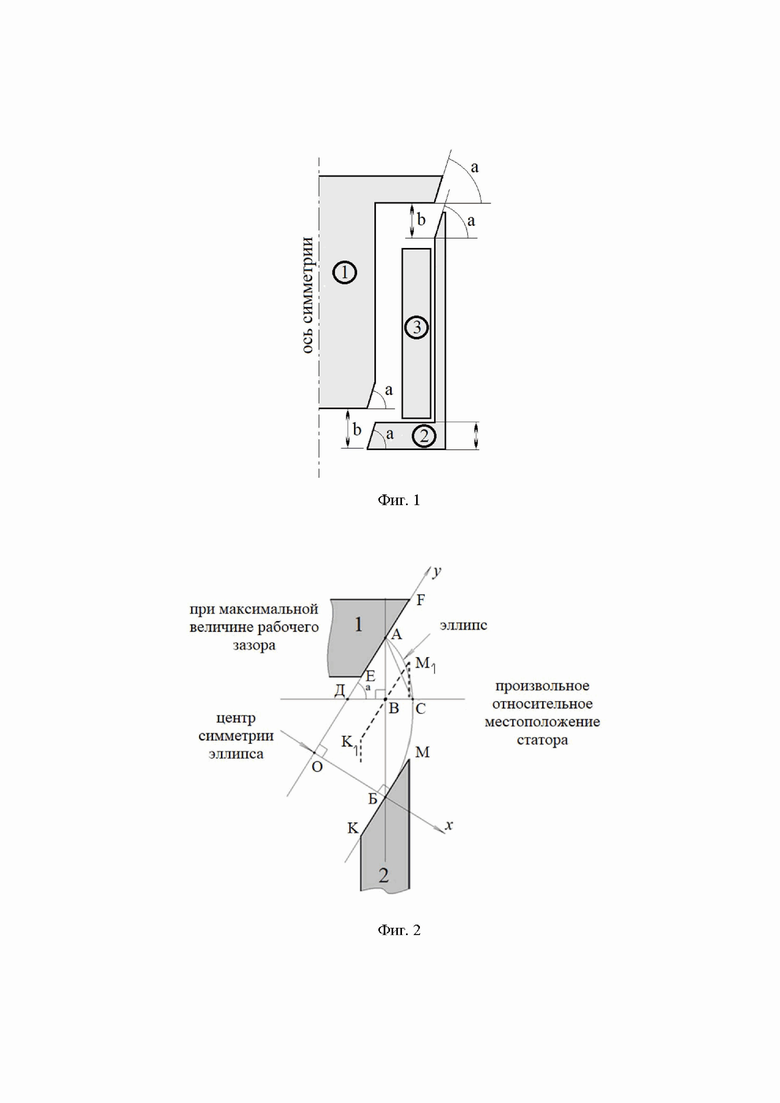
Электромагнит состоит из якоря 1, статора 2 и обмотки возбуждения магнитного поля 3. Магнитопровод электромагнита, сформирован статором и якорем осесимметричной конструкции с двумя рабочими зазорами между статором и якорем, с некоторой величиной угла скоса между образующей, соприкасающейся поверхностью между статором и якорем, и перпендикуляром к оси симметрии магнитопровода (фиг. 1). Якорь 1 имеет возможность под действием электромагнитного усилия (направлено вниз) и противодействующего усилия нагрузки (не показана на фигуре, направлена вверх) совершать колебательные движения в пределах максимального рабочего зазора величиной b с заданной частотой f и амплитудой усилия.
Суть изобретения заключатся в применении формулы, описывающей зависимость прилагаемого электрического напряжения к обмотке возбуждения магнитного поля, формирующего потребление электромагнитом периодической функции тока, параметры которой (частота f и мгновенное значение тока i) согласованы, зависят и в полной мере определяются параметром конструкции электромагнита - углом скоса a образующей рабочего зазора между статором и ротором (фиг. 1).
Электрический ток, потребляемый электромагнитом 4 и определяемый питающим электрическим напряжением, приложенным к обмотке возбуждения магнитного поля 3, формирует величину электромагнитного усилия, наблюдаемого между статором 2 и якорем 1 электромагнита (фиг. 2). Исходя из вибрационного принципа работы электромагнита, функция тока (а, значит, и питающего электрического напряжения) должна представлять собой периодическую функцию с заданной частотой f. При неизменной величине тока, электромагнитное усилие значительно возрастает при приближении якоря к статору, что требует формировать снижение тока в момент приближения якоря к статору.
Предлагаемая в изобретении функция тока должна быть пропорциональна изменению в процессе движения якоря, длины отрезка АС, соединяющего точку пересечения эллипса АСБ и линии ВС, перпендикулярной направлению движения якоря и определяющей некоторое относительное местоположения статора (контур статора обозначен пунктирной линией на фиг. 2). При этом ось эллипса ОА лежит на образующей якоря, а вторая ось ОБ образуется отрезком, перпендикулярным образующей статора и выходящим из середины данной образующей. При относительном движении статора и якоря точка С скользит по эллипсу БСА, а длина отрезка АС снижается от величины, равной максимальному рабочему зазору (АБ) до нулевого значения - при полном выборе рабочего зазора электромагнита. Изменение величины тока, соответственно с приведенными геометрическими построениями, обеспечит согласование величины электромагнитного усилия и расстояния между статором и якорем, при формировании колебательного режима работы электромагнита.
Местоположение точки С определится решением уравнений описывающих эллипс БСА и прямой ВС в координатах Ox-Oy (фиг. 2):
- эллипс описывается уравнением:
- прямая ВС описывается уравнением:
 . (2)
. (2)
Подставив (2) в (1) получим
 , (3)
, (3)
После раскрытия скобок, и сокращения выражение (3) примет вид:
 , (4)
, (4)
где
 , (5)
, (5)
 , (6)
, (6)
 . (7)
. (7)
Решением уравнения (4), в первом квадрате координат (фиг. 2), то есть при
(фиг. 2), то есть при и
и  , относительно
, относительно  является:
является:
 , (8)
, (8)
Подставляя (8) в выражение (2) получим значение координаты  :
:
 . (9)
. (9)
На основании выражений (5 - 9) длина отрезка АС определится выражением:
 . (10)
. (10)
Таким образом, на основании выражений (5-10) становится возможным определить зависимость длины отрезка АС от величины расстояния между статором и якорем АВ. Формирование величины тока, потребляемого электромагнитом, пропорционального значению АС, в зависимости от расстояния между статором и якорем АВ позволяет сформировать колебательное движение якоря электромагнита, отличающееся отсутствием ударного усилия (при соприкосновении якоря и статора).
Структурная схема формирования требуемой функции тока представлена на фиг. 3. Режим работы электромагнита 4 фиксируется с помощью датчика местоположения якоря 5, датчика тока 6 и датчика напряжения 7. На основании информации поступающей с данных датчиков в пропорционально-интегрально-дифференциальном регуляторе 8, на основании разности между требуемой величиной тока и напряжения, а также их фактическими значениями формируется управление источником питания 9.
Итак, чтобы управлять силовым электромагнитом необходимо вычислять параметры эллипса (фиг. 2), проходящего через точки А и Б, образованного первой осью, расположенной на отрезке ЕF, образованного пересечением поверхности якоря, обращенной к статору и секущей плоскостью, и второй осью, расположенной на отрезке, перпендикулярном к первой оси и проходящей через середину отрезка КМ при максимальной величине рабочего зазора между статором и якорем электромагнита, вычислять расстояние АС от точки А, являющейся серединой отрезка ЕF, до точки С, являющейся точкой проекции середины отрезка К1М1, соответствующего отрезку КМ при произвольном относительном местоположении статора на эллипс, и изменять величину напряжения в процессе движения якоря пропорционально расстоянию АС.
Реализация предлагаемого способа управления напряжением питания возможно с применением современных схемотехнических решений систем электропривода. Расчет выражений (5 - 10) возможно производить с относительно высокой скоростью на базе современных цифровых контроллеров. Первичной информацией для расчетов должны являться геометрические размеры конкретной магнитной системы (угол скоса а, максимальный рабочий зазор b (фиг. 1), b=АБ (фиг. 2)), управляемого электромагнита и информация с датчиков напряжения, тока и пространственной координаты общепромышленного применения. Управление скважностью питающего электромагнит напряжения возможно реализовать с применение силовых полупроводниковых ключей.
Настройка способа управления напряжением питания электромагнита будет заключаться в формировании некоторого оптимального угла сдвига фаз между требуемыми функциями напряжения, тока и расстояния между статором и якорем, на который будет оказывать влияние масса якоря, противодействующее усилие, заданная частота и амплитуда электромагнитного усилия, развиваемого электромагнитом. Таким образом, изобретение упрощает построение системы управления колебательным режимом работы электромагнита, в зависимости от заданной амплитуды, частоты и амплитуды электромагнитного усилия.
Пример расчета напряжения питания силовым электромагнитом, в соответствии с предлагаемым способом управления, представлен на фиг. 4. По мере приближения якоря к статору и уменьшению расстояния АВ между ними, напряжение питания должно изменяться от максимального значения, при максимальном значении АВ, до нуля, при равенстве АВ нулю. При настройке системы управления силовым электромагнитом необходимо учесть инерцию движения якоря, при его приближении к статору и сместить график, представленный на фиг. 4 вправо, на величину пути якоря, в течение которого он полностью остановится под действием противодействующего усилия к моменту касания статора. Это позволит избежать удара якоря о статор. При обратном движении якоря график, представленный на фиг. 4 смещать вдоль горизонтальной оси не нужно, что обеспечит постепенный разгон якоря, вследствие постепенного возрастания электромагнитного усилия, в соответствии с повышением питающего напряжения определяющего потребляемый силовым электромагнитом ток. Нелинейность изменения напряжения, подаваемого на обмотку в зависимости от расстояния между якорем и статором, что видно из фиг. 4, формирует колебательный режим работы силового электромагнита, учитывающий его конструктивные особенности - угол скоса а.
Предлагаемое изобретение позволяет упростить систему управления колебательным режимом работы электромагнита, в зависимости от заданной амплитуды, частоты и амплитуды электромагнитного усилия и повысить отношение значения производительности компрессорной техники к ее массогабаритным показателям, за счет согласования развиваемого электромагнитного усилия, в процессе колебательного движения якоря электромагнита, с углом скоса образующей поверхности рабочего зазора между статором и якорем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ БЫСТРОДЕЙСТВУЮЩЕГО РАСПРЕДЕЛИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2329412C1 |
| СПОСОБ РЕАЛИЗАЦИИ ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ АСИММЕТРИЧНОГО ВИБРАЦИОННОГО ДВИЖЕНИЯ КОЛЕБАТЕЛЬНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ | 1995 |
|
RU2091183C1 |
| КЛАПАННЫЙ РАСПРЕДЕЛИТЕЛЬ | 2011 |
|
RU2451857C1 |
| Вибрационное транспортирующее устройство | 1989 |
|
SU1713866A1 |
| СПОСОБ ПОВЫШЕНИЯ БЫСТРОДЕЙСТВИЯ НЕЙТРАЛЬНЫХ ЭЛЕКТРОМАГНИТОВ И НЕЙТРАЛЬНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218624C2 |
| ЭЛЕКТРОМАГНИТНОЕ ПРИВОДНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2002 |
|
RU2263987C2 |
| ЭЛЕКТРОМАГНИТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2010 |
|
RU2466472C2 |
| ЭЛЕКТРОМАГНИТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2008 |
|
RU2389100C2 |
| РЕЗОНАНСНЫЙ ВИБРАТОР | 1999 |
|
RU2160494C2 |
| Поворотный электромагнит | 2019 |
|
RU2704962C1 |
Изобретение относится к области электротехники, а именно к компрессорной технике, приводимой в действие силовыми электромагнитами возвратно-поступательного движения, применяемой в нефтегазовой промышленности. Технический результат заключается в обеспечении колебательного, безударного характера движения якоря. Технический результат достигается тем, что в способе управления силовым электромагнитом, включающем управление движением якоря путем изменения напряжения, в качестве электромагнита выбирают электромагнит осесимметричной конструкции с двумя рабочими зазорами между статором и якорем, с отличной от нуля величиной угла скоса между образующей соприкасающихся поверхностей между статором и якорем и перпендикуляром к оси симметрии магнитопровода электромагнита. Определяют параметры эллипса, проходящего через точки А и Б, образованного первой осью, расположенной на отрезке ЕF, образованного пересечением поверхности якоря, обращенной к статору и секущей плоскостью, и второй осью, расположенной на отрезке, перпендикулярном к первой оси и проходящей через середину отрезка КМ при максимальной величине рабочего зазора между статором и якорем электромагнита. Вычисляют расстояние АС от точки А, являющейся серединой отрезка ЕF, до точки С, являющейся точкой проекции середины отрезка К1М1, соответствующего отрезку КМ при произвольном относительном местоположении статора на эллипс. И изменяют величину напряжения в процессе движения якоря пропорционально расстоянию АС. 4 ил.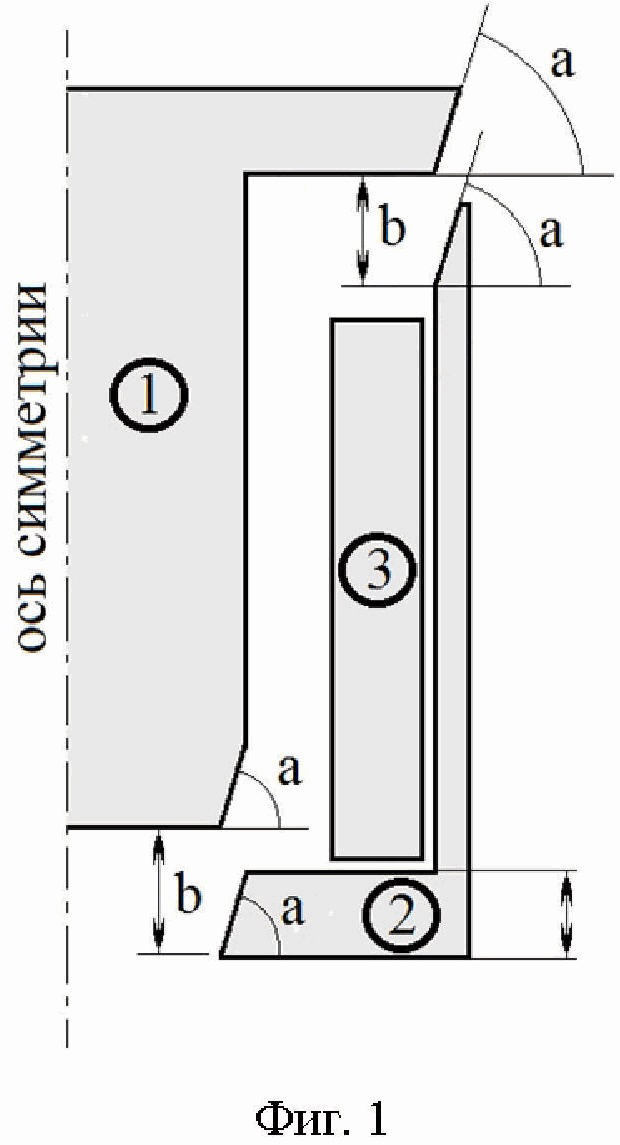
Способ управления силовым электромагнитом, включающий управление движением якоря путем изменения напряжения, отличающийся тем, что в качестве электромагнита выбирают электромагнит осесимметричной конструкции с двумя рабочими зазорами между статором и якорем, с отличной от нуля величиной угла скоса между образующей соприкасающихся поверхностей между статором и якорем и перпендикуляром к оси симметрии магнитопровода электромагнита, определяют параметры эллипса, проходящего через точки А и Б, образованного первой осью, расположенной на отрезке ЕF, образованного пересечением поверхности якоря, обращенной к статору и секущей плоскостью, и второй осью, расположенной на отрезке, перпендикулярном к первой оси и проходящей через середину отрезка КМ при максимальной величине рабочего зазора между статором и якорем электромагнита, вычисляют расстояние АС от точки А, являющейся серединой отрезка ЕF, до точки С, являющейся точкой проекции середины отрезка К1М1, соответствующего отрезку КМ при произвольном относительном местоположении статора на эллипс, и изменяют величину напряжения в процессе движения якоря пропорционально расстоянию АС.
| Головка кинематографического аппарата для пропуска изношенных лент | 1923 |
|
SU2135A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2636052C1 |
| СПОСОБ УПРАВЛЕНИЯ БЫСТРОДЕЙСТВУЮЩИМ ЭЛЕКТРОМАГНИТОМ | 2004 |
|
RU2284600C2 |
| Устройство для управления электромагнитом | 1988 |
|
SU1511772A1 |
| CN 108962537 A, 07.12.2018. | |||

