Предлагаемая система относится к области неразрушающего контроля и технической диагностики.
В процессе эксплуатации элементы конструкции любого объекта подвергаются старению и физическому износу. Мероприятия, имеющие целью предотвратить разрушение объекта (ограничение срока эксплуатации, соблюдение правил эксплуатации, профилактический ремонт и т.д.), не всегда приводят к положительному результату. Не говоря уже о том, что указанные мероприятия и правила не всегда соблюдаются. Так или иначе, но объекты иногда разрушаются во время эксплуатации. Последствия, порой, бывают катастрофическими.
В целях предупреждения аварийных ситуаций на некоторых объектах создаются системы диагностики, отслеживающие возникновение опасных дефектов в процессе эксплуатации объекта.
Так, в RU 2193771, С 27 G 01 N 29/04, Ермаков Б.С. и др. "Способ диагностики и контроля качества материала трубопроводов" предлагается система контроля за состоянием эксплуатируемого газопровода высокого давления. Для чего газопровод разбивается на участки длиной 500-2000 м, на концах которых стационарно устанавливаются генераторы вибрационных колебаний и измерительная аппаратура, отслеживающая прохождение волны вибрационных колебаний по трубопроводу. По характеру колебаний в трубопроводе определяется возникновение дефектов в материале трубопровода, способных привести к аварийному разрушению, выбросу газа, взрывам, пожару. Поскольку газопровод имеет многокилометровую длину и, зачастую, располагается в труднодоступном районе, управление системой предлагается осуществлять по радиоканалу с самолета, совершающего дежурные облеты трассы газопровода.
Аналогично, в RU 94978, С 27 G 01 N 29/04, Дегтев Н.И. и др. "Способ контроля технического состояния пролетных строений" предлагается система контроля за появлением дефектов в конструкции пролета моста. Система имеет несколько групп угловых акселерометров, установленных в контрольных точках. В каждой контрольной точке устанавливается три угловых акселерометра, измерительные оси которых лежат в трех взаимно перпендикулярных плоскостях. Благодаря такой ориентации акселерометры выдают в блок управления системы информацию о распространении вибраций в трех взаимно перпендикулярных направлениях. Вибрации в пролете создаются посредством воздействия на него динамической нагрузкой. Блок управления, на основе анализа распространения вибраций в трех взаимно перпендикулярных направлениях, определяет наличие или отсутствие дефектов, способных привести к разрушению конструкции пролета моста.
В целях создания более простых и дешевых систем, пригодных для контроля за состоянием как крупных, дорогостоящих объектов, так и менее крупных, не столь дорогих, предлагается "Вибрационная система диагностики и предупреждения аварийной ситуации на эксплуатируемом объекте".
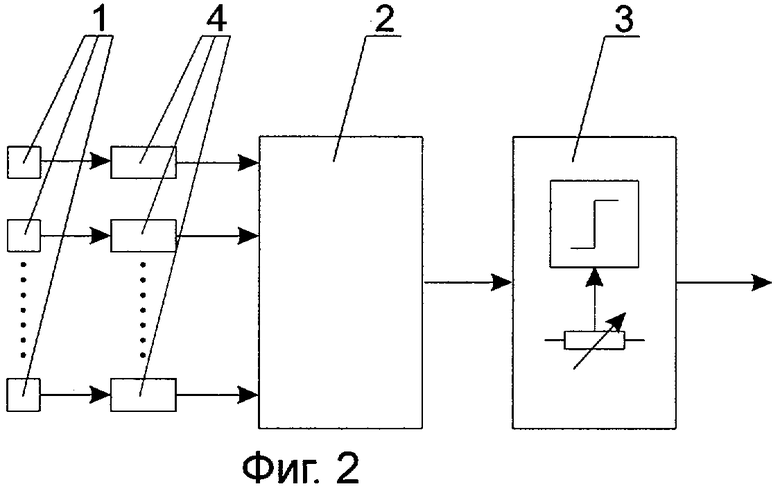
Система, показанная на фиг.1, имеет два или более одинаковых датчика вибраций 1, блок сравнения 2 и пороговый элемент с регулируемой величиной порога 3.
Датчики системы устанавливаются на поверхности элемента конструкции, в месте возможного разрушения, которое определяется предварительно, на основе знаний об особенностях конструкции объекта, на основе опыта разрушений аналогичных конструкций, на основе инженерных расчетов на прочность, на основе исследований, нахождения с помощью приборов мест наиболее опасных механических напряжений.
Датчики улавливают вибрационные колебания, возникающие в материале элемента конструкции в результате или функционирования объекта, или воздействия независимого источника вибраций на объект.
Сигналы от датчиков поступают в блок сравнения, который сравнивает их между собой в любом порядке (например, поочередно с сигналом какого-то датчика сигналы всех остальных датчиков, или с сигналом эталонного датчика, который может быть установлен в любом месте, в том числе и за пределами возможного возникновения трещин, или иным путем).
В исходном состоянии, когда объект исправен, элемент конструкции в месте установки датчиков, как правило, не содержит трещин в материале. Одинаковые датчики, установленные недалеко друг от друга на материале, не имеющем нарушений сплошности, вероятнее всего, будут выдавать примерно одинаковые сигналы. Поскольку одинаковы условия распространения вибрационных колебаний в зоне установки датчиков. Блок сравнения зафиксирует это равенство нулевым (или близким к нулю) сигналом на своем выходе.
В случае возникновения, в процессе эксплуатации, трещин в зоне установки датчиков изменятся условия распространения вибрационных волн в материале. Трещины пролегают случайным образом относительно расположения датчиков, вследствие чего воздействие вибрационных колебаний на датчики, после появления трещин, будет не одинаковым, и датчики выдадут не одинаковые сигналы. Блок сравнения отметит это неравенство резким увеличением сигнала рассогласования на своем выходе.
Сигнал с выхода блока сравнения подается на выходной пороговый элемент ПЭ с регулируемой величиной порога, который решает две задачи. Во-первых, четко обозначить результат контроля выдачей одного из двух сигналов: "0" (норма) или "1" (тревога). И, во-вторых, отсечь несущественные расхождения сигналов датчиков, которые могут считаться допустимыми. В том числе и те, которые появились в процессе эксплуатации объекта (например, в результате влияния внешней среды на датчики или изменения физического контакта датчика с поверхностью элемента конструкции и т.д.)
Пороговый элемент ПЭ сигналы от блока сравнения, не превышающие установленный порог, квалифицирует как нормальные, чему соответствует сигнал "0" на его выходе. И, напротив, если разница между сигналами любых из установленных датчиков превысила пороговою величину, на выходе ПЭ появляется фиксированный сигнал "1", что квалифицируется как сигнал тревоги, предупреждающий о появлении трещин - предвестников разрушения.
Величина порога определяется на основе опыта, инженерных расчетов, исследований.
Вкратце можно сказать, что предложенная система, в процессе эксплуатации объекта, контролирует состояние места возможного разрушения и, при появлении в этом контролируемом месте трещин - предвестников разрушения, выдает предупреждающий сигнал "1" на выходе ПЭ.
Следует, однако, отметить, что объекты могут значительно отличаться друг от друга (по размерам, сложности конструкции и т.д.), и велика вероятность того, что на каком-то объекте сигналы датчиков, установленных в месте возможного разрушения, будут отличаться друг от друга и при исправном состоянии объекта. Причины могут быть разные. Это и особенности конструкции объекта, и разница в размещении датчиков, и множество других причин. Даже таких как присутствие допустимых, в некоторых случаях, нарушений сплошности материала.
Чтобы исключить влияние причин, способных вызвать дисбаланс сигналов датчиков, но не имеющих отношения к началу процесса разрушения, и зафиксировать соотношение сигналов от датчиков при исправном состоянии элемента конструкции объекта, необходимо выполнить балансировку сигналов датчиков. А именно: сигнал каждого датчика умножить на свой "весовой" коэффициент и таким образом выровнять сигналы.
Умножить сигнал каждого датчика на свой весовой коэффициент можно, как это показано на фиг.2, с помощью компенсаторов 4.
В качестве компенсатора можно использовать, например, многооборотный потенциометр. Или использовать усилитель с регулируемым коэффициентом усиления. Или то и другое вместе. Или любое иное средство.
Балансировку можно проводить как в начале функционирования системы диагностики, так и периодически, в процессе эксплуатации объекта. Но в каждом случае - при исправном состоянии контролируемого элемента конструкции. Поскольку совокупность весовых коэффициентов фиксирует соотношение сигналов датчиков на момент выполнения балансировки.
Процесс балансировки контролируется с помощью блока сравнения по его выходному сигналу.
После выполнения балансировки объект включается в эксплуатацию.
Если в процессе эксплуатации, в контролируемой датчиками зоне, появятся трещины - предвестники разрушения, они изменят условия распространения вибрационных волн в зоне установки датчиков. Как уже отмечалось, трещины пролегают случайным образом и в разной степени влияют на датчики. Меняется соотношение сигналов от датчиков. В результате нарушается баланс между сигналами датчиков и резко возрастает сигнал рассогласования на выходе блока сравнения. Пороговый элемент ПЭ фиксирует превышение установленного порога сигналом "1" на своем выходе, предупреждающим о появлении трещин и начале процесса разрушения контролируемого элемента конструкции.
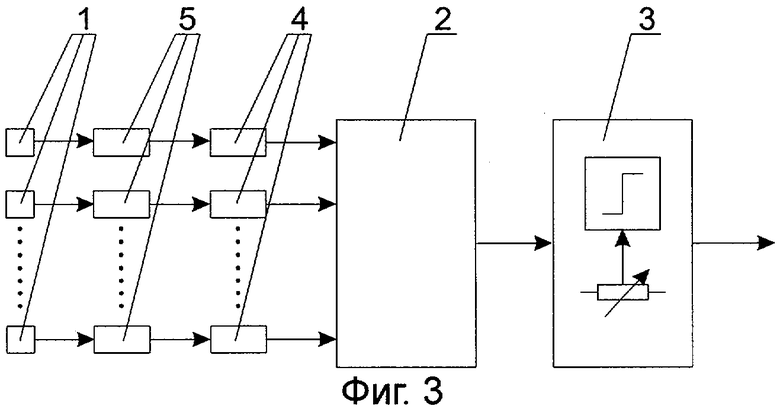
Если в процессе функционирования объект сам является источником вибрационных колебаний, вибрации, создаваемые объектом, могут содержать колебания очень широкого диапазона. От низких до высоких частот. Появление трещин в зоне установки датчиков может проявиться в виде существенных изменений колебаний, не на всех частотах. Избавиться от влияния неинформативных частот, которые создают ненужные помехи, можно с помощью фильтров 5 (см. фиг.3). Фильтрами можно выделить информативные частоты и далее использовать только эти составляющие сигналов датчиков для последующих этапов обработки, таких как балансировка, сравнение, сопоставление результатов сравнения с пороговой величиной. Определить информативные частоты можно экспериментальным путем или, если это возможно, на основе результатов, уже полученных кем-то ранее.
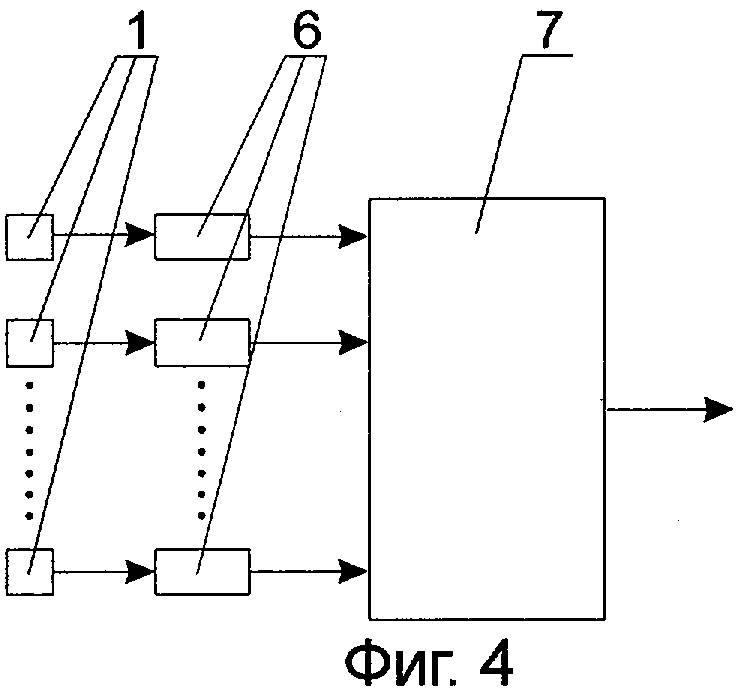
Возможен также вариант системы, показанный на фиг.4. В этом варианте сигналы с вибрационных датчиков 1 поступают на аналого-цифровые преобразователи 6, которые преобразуют их из аналоговой в цифровую форму представления и далее подают в микроконтроллер 7.
Микроконтроллер решает все остальные задачи системы. Если необходимо, выделяет информативные частоты, выполняет балансировку сигналов датчиков, сравнивает сигналы, результат сравнения сопоставляет с пороговой величиной, на выходе выдает сигнал "0", если результат сравнения сигналов не превысил пороговое значение, или "1", если имело место превышение порогового значения. Как и в предыдущих вариантах, сигнал "1" свидетельствует о появлении трещин и начале процесса разрушения.
Все варианты системы могут иметь в своем составе независимый генератор вибрационных колебаний любого вида, который может быть установлен на объекте в любом месте.
С помощью представленных вариантов системы можно контролировать любое количество мест на объекте.
Использование того или иного варианта системы зависит от конкретного объекта и требований к системе (по стоимости, размерам блоков, условиям эксплуатации, надежности, качеству и т.д.)
Весьма заманчивым является вариант с цифровой обработкой информации. Поскольку дискретные компоненты совершенствуются и развиваются наиболее активно. В результате чего снижается их стоимость, растут возможности, улучшается качество.
Не исключено, что аналоговые варианты системы подойдут для простых ситуаций, когда не требуется устанавливать много датчиков и контролировать сразу несколько мест на объекте. Если, например, можно обойтись установкой двух датчиков в контролируемом месте, блок сравнения может быть реализован на одном операционном усилителе. На инвертирующий вход подается сигнал одного датчика, на прямой вход - сигнал другого. На выходе получим сигнал, пропорциональный разности входных сигналов. Для группы более двух датчиков сложность аналогового блока сравнения значительно возрастает. Варианты исполнения могут быть разные. Например, с поочередным подключением датчиков на вход операционного усилителя. Но в этом случае надо иметь управляемый переключатель исправление для него. Возможен вариант с использованием группы операционных усилителей. С использованием сумматоров. А также иные варианты.
Что касается реализации ПЭ, вариантов известно много. Можно, например, использовать компаратор, на один вход которого подать через диодный мост (для получения абсолютного значения) сигнал с выхода блока сравнения, а на другой - пороговую величину с потенциометра, запитанного от источника питания. Фиксировать появление сигнала "1" триггером на выходе. Возможны более приемлемые решения.
Для сложного случая, со значительным количеством датчиков и контролируемых мест на объекте, вероятно, имеет смысл использовать цифровой вариант системы, организованный по типу распределенной системы сбора и обработки информации.
В заключение отметим, что, с помощью представленных вариантов системы, при соответствующей настройке ее компонентов и размещении датчиков на объекте, можно попытаться решать более широкие задачи обнаружения дефектов и контроля состояния объекта. Как для отдельных элементов конструкции, так и для объекта в целом.
Перечень фигур. Фиг.1 базовый вариант системы, включающий вибрационные датчики 1, блок сравнения 2, пороговый элемент 3. Фиг.2 - вариант системы с компенсаторами 4, предназначенными для балансировки сигналов датчиков. Фиг.3 - вариант системы с фильтрами 5, предназначенными для выделения информативных частот сигналов датчиков. Фиг.4 - вариант системы с преобразованием сигналов датчиков из аналоговой в цифровую форму представления при помощи аналого-цифровых преобразователей 6 и последующей обработкой информации на микроконтроллере 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ СПОСОБ ДИАГНОСТИКИ НАЧАЛА ПРОЦЕССА РАЗРУШЕНИЯ В ЭЛЕМЕНТАХ КОНСТРУКЦИИ ОБЪЕКТА | 2005 |
|
RU2284518C1 |
| ВИБРАЦИОННЫЙ СПОСОБ ДИАГНОСТИКИ НАЧАЛА ПРОЦЕССА РАЗРУШЕНИЯ В ЭЛЕМЕНТАХ КОНСТРУКЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324929C1 |
| Способ вибрационной диагностики процессов разрушения конструкций | 2017 |
|
RU2659193C1 |
| Способ вибрационного контроля зазоров в конструкциях изделий | 2023 |
|
RU2830992C1 |
| Устройство ультразвукового контроля состояния изделий | 2016 |
|
RU2640956C1 |
| СИСТЕМА ВИБРАЦИОННОГО КОНТРОЛЯ, ЗАЩИТЫ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ | 2011 |
|
RU2464486C1 |
| СПОСОБ И УСТРОЙСТВО ОПЕРАТИВНОЙ ДИАГНОСТИКИ МЕХАНИЗМА | 2004 |
|
RU2267094C1 |
| Универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга для управления состоянием и предупреждения аварий оборудования опасных производственных и транспортных объектов | 2019 |
|
RU2728167C1 |
| ВИБРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2319210C1 |
| Система для мониторинга искусственных сооружений высокоскоростной магистрали | 2018 |
|
RU2698419C1 |
Использование: для диагностики возникновения опасных дефектов в процессе эксплуатации объекта. Сущность заключается в том, что вибрационная система диагностики и предупреждения аварийной ситуации на эксплуатируемом объекте состоит из двух или более одинаковых датчиков вибрации, выходы которых подключаются к входам фильтров, которые выделяют из сигналов датчиков частоты, несущие информацию об изменениях вибрационных колебаний после появления трещин в контролируемом месте, а выходы фильтров подключаются к входам любого исполнения, с помощью которых, при исправном состоянии контролируемого элемента конструкции объекта, выравниваются между собой сигналы датчиков посредством умножения каждого сигнала на свой поправочный «весовой» коэффициент, а выходы компенсаторов подключаются к блоку сравнения любого исполнения, который в любом порядке сравнивает между собой сигналы датчиков вибраций, возникающих в результате функционирования объекта или воздействия независимого источника вибрационных колебаний. Технический результат: создание простой и дешевой системы для контроля за состоянием объекта. 2 н.п. ф-лы, 4 ил.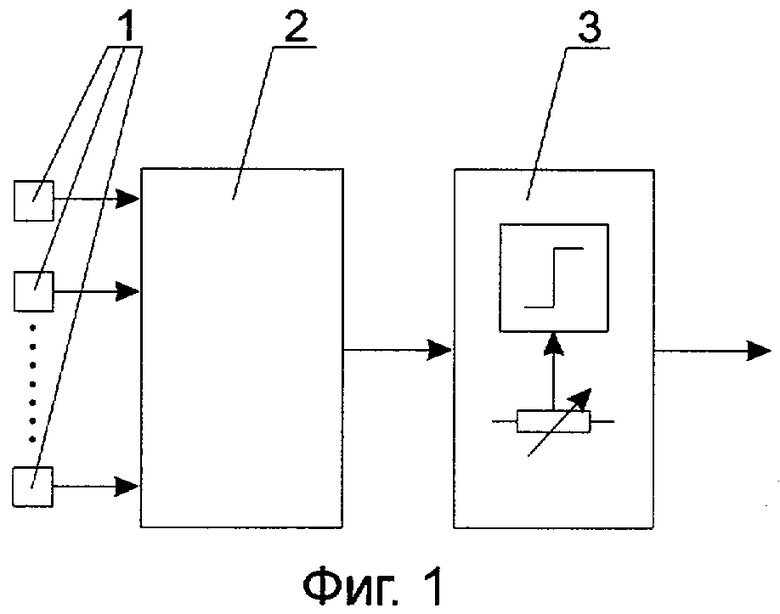
| СПОСОБ КОНТРОЛЯ ДЕФЕКТНОСТИ ИЗДЕЛИЯ | 1994 |
|
RU2111485C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПРОЛЕТНЫХ СТРОЕНИЙ | 2000 |
|
RU2194978C2 |
| Способ балансировки корреляционного измерителя шума электрохимических сейсмоприемников | 1990 |
|
SU1739324A1 |
| Способ диагностики состояния пар трения | 1988 |
|
SU1552044A1 |
| Способ вибрационной диагностики механизмов | 1987 |
|
SU1516831A1 |
| Способ контроля дефектности изделия | 1989 |
|
SU1714492A1 |
| РОЛИКОВАЯ ОПОРА, ОСТАНОВ ОБРАТНОГО ХОДА И РОЛИКИ ЛЕНТОЧНОГО КОНВЕЙЕРА (ВАРИАНТЫ) | 1997 |
|
RU2136569C1 |
| УСТРОЙСТВО И СПОСОБ РАСПРОСТРАНЕНИЯ ВЫСОКОКАЧЕСТВЕННЫХ ВИДЕО-И АУДИОПРОГРАММ К УДАЛЕННЫМ МЕСТАМ | 1999 |
|
RU2238614C2 |
| JP 61253459 A, 11.11.1986 | |||
| Способ получения гидроксотетранитронитрозорутената натрия двухводного | 1983 |
|
SU1126543A1 |

