Изобретение относится к области навигации, а именно к области бесплаформенных инерциальных навигационных систем (БИНС), и может быть использовано для определения ориентации акселерометров БИНС, т.е. для начальной выставки БИНС.
Известен способ начальной выставки БИНС в горизонт [1] на неподвижном основании, включающий получение значений базовых кажущихся ускорений в базовой системе координат, при этом кажущиеся ускорения в базовой системе координат могут быть, например, измерены акселерометрами базовой навигационной системы или рассчитаны аналитически с использованием геодезических координат местоположения, измерение ускорений акселерометрами выставляемой БИНС и определение ориентации в горизонте по разности значений измеренных и базовых ускорений.
Недостатком известного способа является то, что он может применяться только для решения задачи выставки БИНС на неподвижном основании. Как известно [2], для выставки на подвижном основании в состав БИНС требуется ввести датчики ориентации (датчики угловой скорости (ДУС) или свободные гироскопы) для определения текущей ориентации БИНС в процессе начальной выставки путем решения уравнений идеальной работы БИНС, а затем осуществляют коррекцию ориентации БИНС, производя сравнение векторов в базовой и выставляемой системах. Это сильно усложняет как сам способ, так и его аппаратную реализацию.
Задачей, на решение которой направлено изобретение, является получение возможности определения ориентации акселерометров БИНС на подвижном основании. При этом задача определения ориентации акселерометров БИНС на подвижном основании должна решаться без использования датчиков ориентации выставляемой БИНС в процессе начальной выставки БИНС и без решения уравнений идеальной работы БИНС.
Поставленная задача решается за счет того, что в способе определения ориентации акселерометров БИНС, включающем получение значений базовых кажущихся ускорений в связанной системе координат и измерение ускорений акселерометрами БИНС, согласно изобретению одновременно дополнительно измеряют ориентацию связанной системы координат относительно базовой, по двум или более отличающимся друг от друга значениям ускорений определяют взаимную ориентацию связанных систем координат, а затем, используя ориентацию связанной системы координат относительно базовой, определяют ориентацию акселерометров БИНС относительно базовой системы координат.
К существенным отличиям заявленного решения от известного относится то, что сравнением значений кажущегося ускорения на оси связанных систем координат базовой и выставляемой систем определяют их взаимную ориентацию (взаимную ориентацию осей связанных систем координат), а с использованием ориентации связанных осей относительно базовой системы координат определяют ориентацию акселерометров выставляемой БИНС, за счет этого ориентацию акселерометров выставляемой БИНС определяют на подвижном основании и без привлечения датчиков ориентации в составе выставляемой БИНС и решения уравнений идеальной работы БИНС в процессе определения ориентации.
При модернизации систем управления (СУ) введением в их состав БИНС актуальной является задача минимизации стоимости модернизации. Поэтому для СУ, имеющих в своем составе свободные гироскопы, целесообразно строить БИНС с использованием этих гироскопов в качестве датчиков ориентации. При ограниченных углах прокачки гироскопов и произвольном движении в процессе начальной выставки использование гироскопов в качестве датчиков ориентации в процессе начальной выставки невозможно. Поэтому предлагаемое техническое решение имеет существенное практическое значение.
На фиг.1 приведены системы координат, использованные в предлагаемом способе.
На фиг.2 показана взаимная ориентация связанных систем координат и вектор кажущегося ускорения, значения (компоненты вектора) которого используются для определения взаимной ориентации осей связанных систем координат.
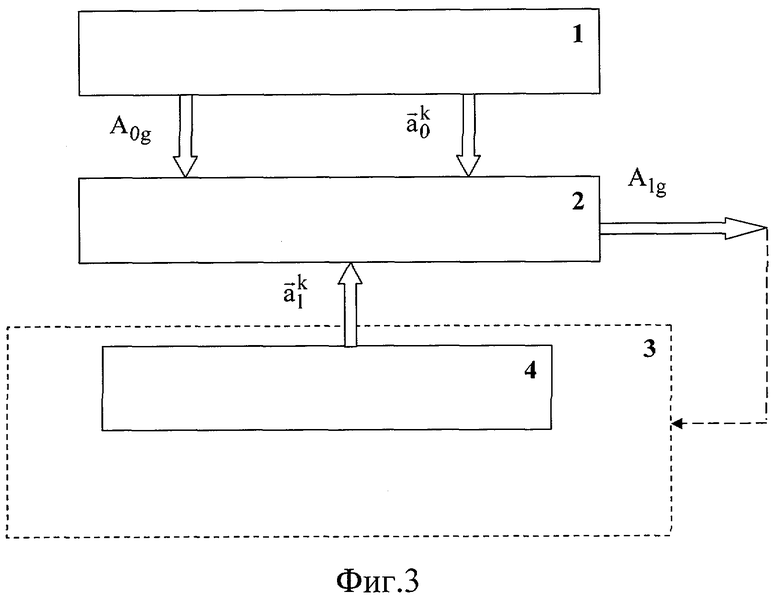
На фиг.3 приведена структурная схема устройства, поясняющая реализацию способа.
На фиг.1 показаны три оси базовой системы координат OxБ, OyБ, OzБ, три оси связанной базовой системы координат Ox1Б, Oy1Б, Oz1Б и три оси связанной с БИНС системы координат Ox1, Oy1, Oz1.
На фиг.2 показаны три оси связанной базовой системы координат Ох1Б, Oy1Б, Oz1Б, три оси связанной с БИНС системы координат Ox1, Oy1, Oz1 и вектор кажущегося ускорения  .
.
Далее по тексту введены следующие обозначения:
 - вектор кажущегося ускорения, измеренный акселерометрами базовой системы на ее связанные оси,
- вектор кажущегося ускорения, измеренный акселерометрами базовой системы на ее связанные оси,
 - вектор кажущегося ускорения, измеренный акселерометрами выставляемой системы на ее связанные оси,
- вектор кажущегося ускорения, измеренный акселерометрами выставляемой системы на ее связанные оси,
Ag0 - матрица перехода от связанной с базовой системой "0" к земной "g" системе координат,
Ag1 - матрица перехода от связанной с БИНС системой "1" к земной системе координат.
На фиг.3 приведена блок-схема устройства для реализации способа определения ориентации акселерометров БИНС, причем базовая система обозначена позицией 1, определитель ориентации позицией 2, выставляемая БИНС позицией 3, а акселерометры, входящие в состав БИНС, ориентация которых определяется, позицией 4.
В качестве базовой системы 1 может быть использована инерциальная навигационная система (ИНС) любого типа. В качестве определителя 2 ориентации может быть использовано вычислительное устройство.
Способ реализуют следующим образом.
Базовая система 1 одновременно измеряет значения кажущегося ускорения на оси связанной системы координат и ориентацию осей связанной системы координат относительно базовой системы координат, например, в виде матрицы ориентации AgБ (фиг.1, 3). Акселерометры (4) выставляемой БИНС 3 одновременно с базовой системой измеряют значения кажущегося ускорения. Определитель 1 ориентации по значениям кажущегося ускорения определяет взаимную ориентацию осей связанных систем координат, а с использованием матрицы ориентации AgБ определяет ориентацию акселерометров БИНС 3.
Сущность изобретения поясняется его описанием и обоснованием его осуществимости.
Известно, что акселерометры 4 измеряют проекции вектора кажущегося ускорения, которые используются в БИНС 3 для расчета навигационных параметров. Задача начальной выставки решена, если определена ориентация акселерометров 4 относительно известной, например, земной системы координат.
Базовая система 1, например ИНС, измеряет ориентацию связанной системы координат относительно базовой и вектор кажущегося ускорения на оси связанной системы координат.
Акселерометры 4 БИНС 3 измеряют вектор кажущегося ускорения на оси системы координат, связанной с выставляемой БИНС 3.
Определитель 2 ориентации находит ориентацию связанных осей БИНС 3 (осей акселерометров 4) относительно базовой системы координат. Эту ориентацию БИНС 3 использует в качестве начальной ориентации в момент перехода в режим автономной работы БИНС 3.
Считаем, что базовая система 1 измеряет вектор кажущегося ускорения в точке местоположения акселерометров БИНС, а взаимная ориентация связанных систем координат в процессе начальной выставки постоянна.
Пусть

Тогда

(2) представляет собой систему из трех уравнений с тремя неизвестными углами взаимной ориентации связанных систем координат.
Для малых углов взаимной ориентации систем координат
Тогда (2) запишется в виде системы линейных уравнений

Определитель системы (3) равен нулю. Следовательно, параметры взаимной ориентации по одному измерению не могут быть определены, что полностью соответствует утверждению, что для осуществления выставки необходимы 2 или более неколлинеарных вектора.
Перепишем систему (3) для независимых измерений i, n, k, введя обозначения  ,
, 
Определитель системы (4)

Если Δ≠0, то система (4) имеет единственное решение:



Найдена взаимная ориентация связанных систем координат
А01=Е-λ
Тогда ориентация акселерометров 4 БИНС 3 относительно базовой системы координат определяется по формуле
A1g=A10A0g=(Е-λ)TA0g=(E+λ)A0g
Получена ориентация связанных осей акселерометров 4 относительно базовой системы координат

Таким образом, решена задача определения ориентации акселерометров 4 в процессе начальной выставки БИНС 3 при малых углах рассогласования связанных осей.
При произвольных углах взаимной ориентации связанных осей эта ориентация известна с точностью до малых углов, которые определяются в процессе начальной выставки БИНС 3.

В - известная матрица взаимной ориентации осей связанных систем координат.
Умножая (10) слева на ВT, получим
BTA1gAg0=E+λ.
Вводя обозначение A1g=BTA1g приходим к выражению (9).
Таким образом, задача выставки при произвольной взаимной ориентации осей сведена к задаче с малыми углами взаимной ориентации.
В процессе калибровки БИНС 3 измерения акселерометров 4 и датчиков ориентации БИНС 3 (датчики угловой скорости или/и свободные гироскопы) приводят к системе координат, связанной с корпусом БИНС 3. Предложенное техническое решение может быть использовано для начальной выставки БИНС независимо от наличия в ее составе датчиков ориентации, находящихся в режиме измерения или отключенных в процессе начальной выставки БИНС.
Источники информации
1. Степанов О.А. "Особенности построения и перспективы развития инерциально-спутниковых систем", стр.28. Сборник статей и докладов "Интегрированные инерциально-спутниковые системы навигации", Санкт-Петербург, 2001 г., (прототип).
2. Патент РФ №2082098, Способ комплексирования инерциальной навигационной системы и комбинированная навигационная система, опубл. 1997.06.20., МПК G 01 C 23/00.
Изобретение относится к измерительной технике и может быть использовано для реализации режима начальной выставки акселерометров. Технический результат - расширение функциональных возможностей. Для достижения данного результата дополнительно введены операции измерения ориентации связанной системы координат относительно базовой системы координат. Определения взаимной ориентации связанных систем координат по двум или более отличающимся друг от друга измерениям ускорений и ориентации акселерометров бесплатформенной инерциальной навигационной системы относительно базовой системы координат. 3 ил.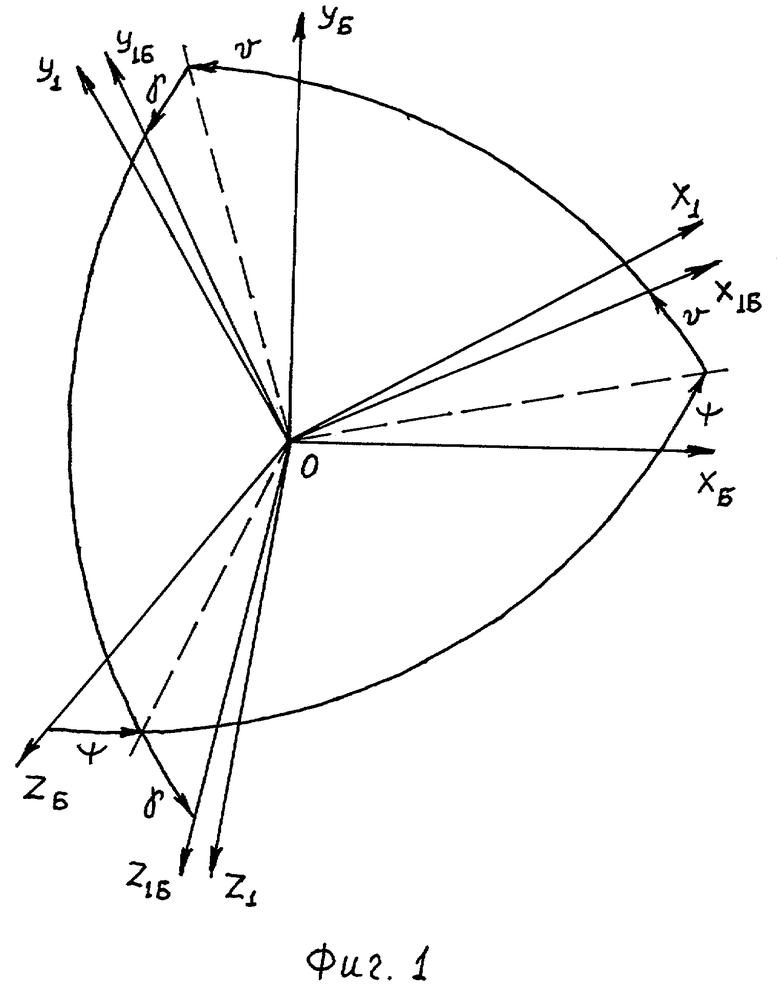
Способ определения ориентации акселерометров бесплатформенной инерциальной навигационной системы (БИНС), включающий получение значений базовых кажущихся ускорений в связанной системе координат и измерение ускорений акселерометрами БИНС, отличающийся тем, что одновременно дополнительно измеряют ориентацию связанной системы координат относительно базовой, по двум или более отличающимся друг от друга значениям ускорений определяют взаимную ориентацию связанных систем координат, а затем, используя ориентацию связанной системы координат относительно базовой, определяют ориентацию акселерометров БИНС относительно базовой системы координат.
| Степанов О.А | |||
| Особенности построения и перспективы развития инерциально-спутниковых систем / Сб | |||
| статей и докладов «Интегрированные инерциально-спутниковые системы навигации», Санкт-Петербург, 2001, с.28 | |||
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| US 3883812 А, 13.05.1975 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |
| Математическое и программное обеспечение системы автономной навигации КА «Янтарь» | |||
| М.: МО СССР, 1986, с.65. | |||

