Изобретение относится к области навигации, а именно к определению пилотажно-навигационных параметров полета летательного аппарата.
Известны способы повышения точности определения навигационных параметров летательных аппаратов (ЛА), заключающиеся в повышении точности измерителей и в использовании дополнительной информации о математических моделях погрешностей инерциальных датчиков и блоков измерителей (БИ), подразделяющиеся на алгоритмическую компенсацию погрешностей инерциальных измерителей; статистическую обработку инерциальной информации, автокомпенсацию инструментальных погрешностей при структурной избыточности [1].
Недостатками данных способов является следующее:
существующие блоки измерителей инерциальных навигационных систем обладают точностными характеристиками, не позволяющими достичь высокой точности определения навигационных параметров ЛА, либо не удовлетворяют требованиям по массогабаритным характеристикам, либо по противоперегрузочной устойчивости;
алгоритмическая компенсация погрешностей инерциальных измерителей, основанная на использовании дополнительной информации о математических моделях погрешностей инерциальных датчиков и блоков измерителей, трудоемка и обладает относительной условностью, связанной со случайным характером погрешностей измерителей, значительным увеличением объема вычислений при сравнительно небольшом повышении точности;
статистическая обработка инерциальной информации предполагает оптимальную фильтрацию при практической реализации оптимальных фильтров, что сопряжено с трудностями в реализации полных математических моделей погрешностей из-за больших вычислительных затрат и отсутствия априорной информации о характере погрешностей;
автокомпенсация инструментальных погрешностей основана на определении погрешностей измерителей при помощи дополнительного устройства, которое может изменять свое положение относительно одной из осей чувствительности блоков измерителей, и имеет недостатки, связанные с дискретным характером вычислений дрейфов измерителей и возможным совпадением частоты колебаний ЛА с частотой определения дрейфа [2].
Наиболее близким к изобретению является инерциальный навигационный способ определения навигационных параметров летательного аппарата, заключающийся в измерении направления и величины вектора ускорения летательного аппарата относительно измерительной системы координат, определении текущей ориентации измерительной системы координат относительно навигационной системы координат, модуляции погрешностей измерения горизонтальных составляющих вектора угловой скорости и горизонтальных составляющих текущей ориентации измерительной системы координат, определении текущих значений навигационных параметров по известному вектору ускорения и текущей ориентации измерительной системы координат с автокомпенсацией инструментальных погрешностей [3].
Известно устройство - бесплатформенная инерциальная навигационная система (БИНС) на акселерометрах и измерителях угловой скорости, состоящее из блока трех акселерометров и трех однокомпонентных измерителей угловой скорости - кольцевых лазерных гироскопов. Измерительные оси всех инерциальных чувствительных элементов параллельны осям ЛА, связанных с объектом. С выхода акселерометров снимаются проекции кажущегося ускорения, кольцевые лазерные гироскопы дают проекции абсолютной угловой скорости объекта на связанные с ним оси, по которым аналитическим способом определяются пилотажные и навигационные параметры ЛА [4].
Наиболее близким устройством, реализующим способ определения навигационных параметров ЛА является БИНС, содержащая блок датчиков линейных ускорений или линейных скоростей, блок датчиков угловых скоростей и вычислитель вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоком датчиков линейных ускорений или линейных скоростей, а также программные механизмы углового разворота, число которых соответствует числу датчиков угловых скоростей в блоке датчиков угловых скоростей, при этом каждый программный механизм программного разворота кинематически связан с соответствующим датчиком угловой скорости, вход каждого из программных механизмов программного разворота связан с выходом вычислителя вектора состояния объекта [5].
Недостатками известных способа и устройства является недостаточная точность определения пилотажно-навигационных параметров, обусловленная азимутальным уходом приборной системы координат. Этот уход возникает из-за дрейфа азимутального гироскопа, что вызывает нарастание ошибки по координате пропорционально квадрату времени работы.
В основу настоящего изобретения положена задача повышения точности определения пилотажно-навигационных параметров инерциальными навигационными системами ЛА, за счет модулирования вектора ошибки измерения навигационных параметров путем разворота БИ.
Поставленная задача решается тем, что в способе определения навигационных параметров ЛА, заключающемся в измерении направления и величины вектора угловой скорости летательного аппарата относительно измерительной системы координат, определении текущей ориентации измерительной системы координат относительно навигационной системы координат, модуляции погрешностей измерения вектора угловой скорости, определении текущих значений навигационных параметров по измеренным векторам ускорений, угловых скоростей и текущей ориентации измерительной системы координат с автокомпенсацией инструментальных погрешностей, дополнительно определяют направление вектора погрешности текущей ориентации измерительной системы координат и модулируют этот вектор погрешности.
Устройство, реализующее заявляемый способ, представляет собой БИНС, состоящую из блока датчиков 17, 18, 19 линейных ускорений или линейных скоростей, блока датчиков 14, 15, 16 угловых скоростей и вычислителя 29 вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоком датчиков линейных ускорений или линейных скоростей, а также программными механизмами 50 углового разворота, число которых соответствует числу датчиков угловых скоростей в блоке датчиков угловых скоростей, при этом каждый программный механизм программного разворота кинематически связан с соответствующим датчиком угловой скорости, вход каждого из программных механизмов программного разворота связан с выходом вычислителя вектора состояния объекта, дополнительно содержит вторую аналогичную БИНС, образуя при этом инерциальную навигационную мультисистему, при этом два блока измерителей которой одновременно разворачиваются в пространстве в противоположных направлениях программными механизмами углового разворота (силовой частью датчиков углов) по сигналу, вырабатываемому устройством управления, состоящим из определителя 29 разности модуля векторов ошибок угловых скоростей и формирователя 48 управляющего сигнала.
Технический результат изобретения достигается за счет применения всех существенных отличительных признаков изобретения, что позволяет повысить точность определения пилотажно-навигационных параметров полета летательного аппарата за счет компенсации всего вектора погрешностей текущей ориентации измерительной системы координат, а не только его горизонтальных составляющих.
На чертеже представлена блок-схема устройства определения навигационных параметров ЛА.
Устройство для определения навигационных параметров ЛА - инерциальная навигационная мультисистема (ИНМС) содержит два навигационных вычислителя 1 и 2, два блока измерителя 3 и 4 первичной информации, включающие датчики углов 5, 6 и 7 блока 3 измерителей и 14, 15 и 16 блока 4 измерителей, выходы которых соединены с входами вычислителя 23 матрицы направляющих косинусов (МНК) А1 вычислителя 1 навигационного и вычислителя 24 МНК А1 вычислителя 2 навигационного, акселерометры 8, 9 и 10 блока 3 измерителей и 17, 18 и 19 блока 4 измерителей, выходы которых соединены со входами вычислителя 25 скоростей вычислителя 1 навигационного и вычислителя 26 скоростей вычислителя 2 навигационного; измерители 11, 12 и 13 угловых скоростей блока 3 измерителей и 20, 21 и 22 блока 4 измерителей, выходы которых соединены с входами вычислителя 27 МНК А вычислителя 1 навигационного и 28 МНК А вычислителя 2 навигационного и с входами определителя 29 разности модуля векторов ошибок угловых скоростей, выходы вычислителя 27 МНК А вычислителя 1 навигационного и вычислителя 28 МНК А вычислителя 2 навигационного соединены со входами соответственно устройства 30 интегрирующего вычислителя 1 навигационного и устройства 31 интегрирующего вычислителя 2 навигационного, вычислителя 32 МНК D вычислителя 1 навигационного и вычислителя 33 МНК D вычислителя 2 навигационного, выходы устройства 30 интегрирующего и устройства 31 интегрирующего соединены с входами соответственно вычислителя 25 скоростей вычислителя 1 навигационного и вычислителя 26 вычислителя 2 навигационного, выходы которых соединены соответственно с входами устройства 34 интегрирующего вычислителя 1 навигационного и устройства 35 интегрирующего вычислителя 2 навигационного, выходы которых соединены соответственно с входами вычислителя 36 координат и вычислителя 25 скорости вычислителя 1 навигационного и вычислителя 37 координат и вычислителя 26 скорости вычислителя 2 навигационного, выходы вычислителей 36 и 37 координат соединены соответственно с входами устройства 38 интегрирующего вычислителя 1 навигационного и устройства 39 интегрирующего вычислителя 2 навигационного, выходы которых соединены соответственно с входами вычислителя 25 скоростей вычислителя 1 навигационного и вычислителя 26 скоростей вычислителя 2 навигационного, с входами вычислителя 36 координат вычислителя 1 навигационного и вычислителя 37 координат вычислителя 2 навигационного, с входами вычислителя 40 угловых скоростей вычислителя 1 навигационного и вычислителя 41 угловых скоростей вычислителя 2 навигационного, с входами устройства 42 суммирующего, выходы которого соединены с входами устройства 43 множительного, выходы которого являются выходами системы, а выходы вычислителя 32 МНК D вычислителя 1 навигационного и вычислителя 33 МНК D вычислителя 2 навигационного соединены со входами соответственно вычислителя 44 параметров ориентации летательного аппарата вычислителя 1 навигационного и вычислителя 45 параметров ориентации ЛА вычислителя 2 навигационного, выходы которых соединены с входами устройства 46 суммирующего, выходы которого соединены с входами устройства 47 множительного, выходы которого являются выходами системы, выходы определителя 29 разности модуля векторов ошибок угловых скоростей соединены с входами формирователя 48 управляющего сигнала, выходы которого соединены с входами устройства 49 поворотного блока 3 измерителей и устройства 50 поворотного блока 4 измерителей.
Устройства 49 и 50 поворотные известны [6] и представляют собой карданный узел, предназначенный для поворота блоков 3 и 4 измерителей относительно связанных осей летательного аппарата в противоположных направлениях до максимальной разности векторов ошибок.
Вычислители 1 и 2 навигационные известны [7] и предназначены для вычисления пилотажно-навигационных параметров летательных аппаратов.
Выходы устройства 43 множительного несут информацию о широте ϕ, долготе λ, высоте Н, азимутальном угле ε, путевых скоростях VХ, VУ, и VZ, выходы устройства 47 множительного несут информацию о тангаже ν, крене γ и курсе ψ.
Устройство работает следующим образом. Блоки 3 и 4 измерителей разворачиваются относительно друг друга таким образом, чтобы направления векторов погрешностей систем были противоположны. По сигналам, поступающим с измерителей 11, 12, 13 и 14, 15, 16 угловых скоростей блоков 3 и 4 измерителей на определитель 29 разности модуля векторов ошибок угловых скоростей, формируются управляющие сигналы на формирователе 48 управляющего сигнала, поступающие на устройства 49 и 50 поворотные, разворачивающие блоки 3 и 4 измерителей в пространстве в противоположных направлениях до достижения максимального значения модуля разности векторов ошибок по закону управления:

где ωχ, ωα, ωβ - собственно угловые скорости вращения БИ;
ωn - угловая скорость, определяющая период реверса.
По сигналам, поступающим с измерителей 11, 12, 13 угловых скоростей блока 3 измерителей и 20, 21, 22 блока 4 измерителей, вычислители 27 и 28 МНК А соответственно вычислителя 1 навигационного и вычислителя 2 навигационного вычисляют МНК перехода из системы координат, связанной с блоками измерителей в навигационную систему координат (НСК):

где A - МНК перехода от системы координат, связанной с БИ, к НСК;
[ωu] - кососимметричная матрица проекций абсолютных угловых скоростей БИ:

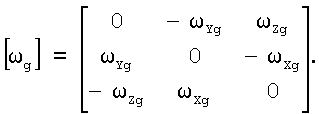
[ωg] - кососимметричная матрица абсолютных угловых скоростей НСК:
По сигналам, поступающим с измерителей ускорений первого и второго блоков измерителей, измерителя барометрической высоты, поступающих на вычислители скоростей первого и второго навигационных вычислителей, и сигналам, поступающим с вычислителей МНК А первого и второго навигационных вычислителей через интегрирующие устройства первого и второго навигационных вычислителей, на которые поступают сигналы с устройства ввода начальных данных МНК А, соответствующие начальным данным МНК А, вводимым во время начальной выставки инерциальной навигационной системы, вычисляются горизонтальные составляющие путевых скоростей:

и вычисляется вертикальная составляющая скорости:

где ΩXg, ΩZg, ΩYg - составляющие относительных угловых скоростей навигационного трехгранника;
uXg, uZg, uYg - проекции угловой скорости Земли на оси навигационного трехгранника;
Hб- барометрическая высота;
α - большая полуось земного эллипсоида;
ge - коэффициент обратной связи;
q2, q1 - коэффициенты обратной связи.
По сигналам, поступающим с вычислителей скоростей первого и второго навигационных вычислителей на вычислители координат первого и второго навигационных вычислителей, через интегрирующие устройства первого и второго навигационных вычислителей, вычисляются географические координаты местоположения летательного аппарата:

где S1=signb32, S2=signb31.



где S1=sign(-b13), S2=signb23.
bij - элементы МНК В перехода от Земной системы координат к навигационной системы координат.
По сигналам с вычислителей скоростей первого и второго навигационных вычислителей и сигналам с вычислителей координат первого и второго навигационных вычислителей вычисляются угловые скорости в навигационной системе координат (НСК):
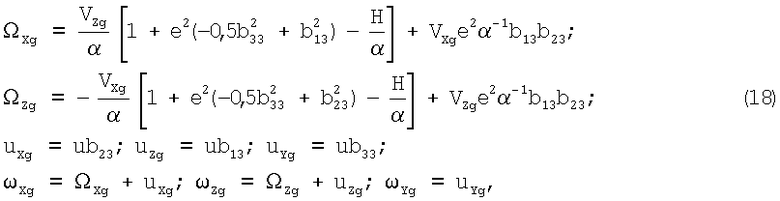
где u - угловая скорость Земли.
По сигналам, поступающим с датчиков углов первого и второго блоков измерителей на вычислители МНК А1 первого и второго навигационных вычислителей, определяются МНК перехода от связанной с ЛА системы координат к связанной с БИ системе координат:
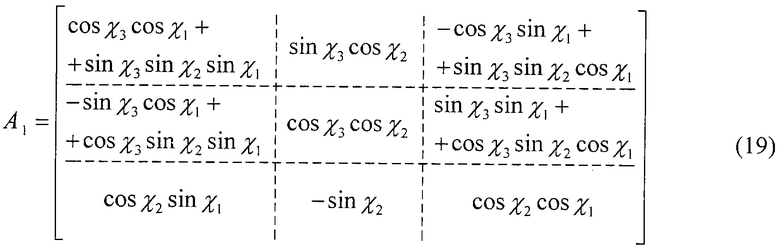
где χ1, χ2, χ3 - углы поворота БИ относительно корпуса ЛА.
По сигналам с вычислителей МНК А1 первого и второго навигационных вычислителей, вычислителей МНК А первого и второго навигационных вычислителей, поступающих на вычислители МНК D первого и второго навигационных вычислителей, определяются матрицы перехода от связанной с ЛА системы координат к НСК:

По сигналам, поступающим с вычислителей МНК D первого и второго навигационных вычислителей на вычислители углов ориентации ЛА первого и второго навигационных вычислителей, определяются углы тангажа, крена и курса:

 где S1=sign-d33, S2=signd32.
где S1=sign-d33, S2=signd32.
 где S1=sign d11, S2=sign d23.
где S1=sign d11, S2=sign d23.
По сигналам, поступающим с вычислителей углов ориентации ЛА первого и второго навигационных вычислителей на суммирующее устройство и множительное устройство, определяются углы курса, крена и тангажа.
Пилотажно-навигационная информация с выходов множительных устройств используется в системах ЛА.
Источники информации
1. Авиационные приборы и навигационные системы / Под ред. О.А.Бабича. - М.: ВВИА им. Н.Е.Жуковского, 1984 г.
2. Кузовков Н.Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. - М.: Машиностроение, 1982. - с.42-56; 122-137, ил.
3. Патент Великобритании №1135118, кл. G01C 21/18, опубл. 27.11.68 (прототип).
4. Инерциальные навигационные системы морских объектов. / Д.П.Лукьянов и др. - Л.: Судостроение, 1989. - с.81-91.
5. Патент №2011169 РФ на изобретение, кл. G01С 21/00, опубл. 15.04.94, бюл. №7 (прототип).
6. Fincke W. Strapdown inertial seusing unit rotation a new approach to inertial navigation. San Diego, 1978, IEEE, Plans - 78, Nov 6-9, p.132-145.
7. Бромберг П.В. Теория инерциальных систем навигации. - М:. Наука, 1979. - с.185-193.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| Способ инерциальной навигации беспилотного летательного аппарата и устройство для его осуществления | 2020 |
|
RU2744700C1 |
| СПОСОБ АВТОНОМНОЙ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2585792C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНФОРМАЦИОННОГО КОМПЛЕКСА НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2792402C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| Способ компенсации инструментальных погрешностей бесплатформенных инерциальных навигационных систем и устройство для его осуществления | 2020 |
|
RU2737886C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
Изобретение относится к области определения пилотажно-навигационных параметров ЛА. Сущность изобретения состоит в создании инерциальной навигационной мультисистемы, включающей два навигационных вычислителя с двумя блоками измерителей, поворотные устройства, обеспечивающие поворот блоков измерителей, позволяющий модулировать вектор погрешности текущей ориентации измерительной системы координат. При этом обеспечивается измерение векторов ошибок, приведение модуля разности ошибок к максимальной величине с целью компенсации всего вектора погрешностей текущей ориентации измерительной системы координат с учетом всех составляющих в пространстве. Устройство позволяет повысить точность определения навигационных параметров летательного аппарата. 2 н.п. ф-лы, 1 ил.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1990 |
|
RU2011169C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| Запорно-пусковой клапан для систем автоматического пожаротушения | 1984 |
|
SU1235508A1 |
| Селезнев В.П | |||
| Навигационные устройства | |||
| - М.: Машиностроение, 1974, с.600. | |||

