Изобретение относится к приборостроению и может быть использовано для создания бесплатформенных инерциальных навигационных систем (БИНС), которыми оснащены подвижные объекты и которыми решаются две основные задачи - определение текущей ориентации объекта и проектирование на оси сопровождающего трехгранника (СТГ) ускорений (задачи ориентации) и определение текущего местоположения объекта, скорости его изменения и других параметров движения (задачи навигации).
Эти задачи в цифровых ЭВМ решаются дискретно и частота дискретизации должна быть, по крайней мере, в два раза выше максимальной частоты изменения параметров ориентации в решаемых задачах [1]. Иначе возникает дополнительная вычислительная ошибка [2].
Для абсолютного большинства объектов ориентация может меняться быстро, в то время как координаты меняются сравнительно медленно и, следовательно, задачу навигации можно решать с меньшей частотой, чем задачу ориентации, уменьшив тем самым требования к бортовому компьютеру. Однако задачу ориентации по отношении к сопровождающему трехграннику (СТГ) невозможно решить без знания текущих координат объекта, поскольку сам СТГ меняет свою ориентацию при движении объекта.
Во многих БИНС бортовой компьютер навигации не находится в блоке чувствительных элементов (БЧЭ) и имеется только электрическая связь между ними от БЧЭ к бортовому компьютеру. Возникает проблема, как организовать вычисления ориентации и навигации, чтобы передача информации от БЧЭ к бортовому компьютеру происходила с минимально возможной частотой для повышения надежности канала связи и снижения требований к быстродействию бортового компьютера. Особенно остро стоит задача понижения частоты, передаваемой из БЧЭ информации, если необходимо осуществить запись текущей информации, например, для последующей обработки и анализа работы БИНС. Предлагаемое изобретение направлено на решение этой задачи.
Известна бесплатформенная инерциальная навигационная система подвижного объекта [RU 2676941, C1, G01C 23/00 11.01.2019], содержащая датчики угловой скорости и датчики кажущегося ускорения, подключенные к бортовому компьютеру, в котором хранится априорная информация о вращении Земли, ее гравитационном поле и начальных условиях о движении объекта и в каждый текущий момент времени последовательно вычисляются шесть переменных инерциальной информации, пятнадцать переменных навигационной информации и функция управления движением объекта, при этом, в качестве инерциальных датчиков использованы три ротора с идентифицированными массогеометрическими характеристиками, вращающихся вокруг осей, каждая из которых установлена в два опорных узла, каждый из которых представляет собой пять датчиков сил, четыре из которых перпендикулярны оси вращения и взаимно перпендикулярны, а пятый установлен вдоль оси вращения на ее торце, указанные датчики сил контактируют с осью вращения в режиме подшипников скольжения, а противоположные концы датчиков сил контактируют с корпусом, жестко установленным на объекте, каждый датчик силы выдает сигнал, равный его силе сжатия; ротор приводится в движение моментным двигателем и снабжен датчиками угла поворота, угловой скорости и углового ускорения; выходы датчиков силы и датчиков угла, угловой скорости и углового ускорения подключены ко входу бортового компьютера по беспроводной технологии передачи информации, в котором последовательно вычисляются реакции опор осей вращения роторов инерциальных датчиков, восемнадцать переменных инерциальной информации с использованием избыточности для контроля правильности вычислений и повышения надежности, пятнадцать переменных навигационной информации и функция управления движением объекта.
Недостатком устройств является относительно низкая надежность и сложность, вызванные использованием беспроводной технологии передачи информации и относительно высокие требования к быстродействию бортового компьютера.
Известна также бесплатформенная инерциальная навигационная система [RU 2563333, C1, G01C 21/10, 20.09.2015], содержащая датчик угловой скорости с чувствительным элементом точного отсчета и три акселерометра, причем, акселерометры объединены в блок акселерометров, подключенный входом-выходом к бортовой цифровой вычислительной машине, а на ось чувствительности датчика угловой скорости к чувствительному элементу точного отсчета установлен чувствительный элемент грубого отсчета, составившие вместе с подключенными к каждому чувствительному элементу счетчиками частоты соответственно точного и грубого отсчета датчик угловой скорости, расположенный по оси, совпадающей с одной из граней условного куба, на двух других осях, совпадающих с двумя другими, смежными гранями куба, исходящими из одной вершины куба, установлено еще по одному датчику угловой скорости, а четвертый датчик угловой скорости расположен на оси, совпадающей с диагональю условного куба, причем выходы всех счетчиков подключены к входам специализированного вычислительного устройства угловой скорости, составляющего совместно с датчиками угловой скорости блок датчиков угловой скорости, подключенный входом-выходом к бортовой цифровой вычислительной машине, входы питания и синхронизации которой, а также входы питания и синхронизации блока акселерометров и блока датчиков угловой скорости подключены к одноименным выходам подсистемы электропитания, установочный вход которой подключен к выходу бортовой цифровой вычислительной машины.
Недостатком устройств является относительно низкая надежность и относительно высокие требования к быстродействию бортового компьютера.
Наиболее близким по технической сущности к предложенному является способ повышения точности бесплатформенной инерциальной навигационной системы (БИНС) [RU 2725029, C1, G01C 23/00, 29.06.2020], основанный на применении математической модели погрешностей БИНС и их оценке с помощью фильтра Калмана путем обработки наблюдений геофизических инвариантов, причем, в качестве наблюдений применяются разности сигналов, пропорциональных вычисленным в БИНС и известным априорно значениям проекций вектора угловой скорости вращения Земли на оси инерциальной системы координат.
Недостатком способа является относительно низкая точность и относительно высокие требования к быстродействию бортового компьютера.
Задача, которая решается в изобретении, направлена на создание бесплатформенной инерциальной навигационной системы с повышенной точностью и надежностью путем снижения в n=10 и более раз требуемой частоты передачи информации по каналу связи от блока чувствительных элементов к бортовому компьютеру, причем это снижение частоты должно требовать минимального дополнительного вычислительного времени, что, одновременно, снижает требования к реализующим способ устройствам и упрощает их конструкцию.
Выбор максимально возможного n (коэффициента понижения частоты) определяется возможностями вычислителя БЧЭ и допустимой погрешностью вычисления навигационных параметров.
Поставленная задача решается, а требуемый технический результат достигается тем, что, в способе определения ориентации объекта в бесплатформенной инерциальной навигационной системе, включающем проектирование данных об ускорении объекта на оси сопровождающего трехгранника, согласно изобретению, проектирование данных об ускорении объекта на оси сопровождающего трехгранника проводят последовательно в два этапа, на первом из которых формируют n проекций получаемых от акселерометров данных об ускорении объекта на пространственные оси вспомогательной системы координат, совпадающей в начальный момент с приборной системой координат и остающейся далее неподвижной в инерциальном пространстве, на втором этапе после формирования n проекций получаемых от акселерометров данных об ускорении объекта на координатные оси вспомогательной системы, определяют среднее значение из n проекций данных на координатные оси вспомогательной системы, а затем передают их в навигационный вычислитель для проектирования на оси сопровождающего трехгранника и вычисления по ним навигационных параметров, характеризующих ориентацию объекта в бесплатформенной инерциальной навигационной системе.
На чертеже представлены:
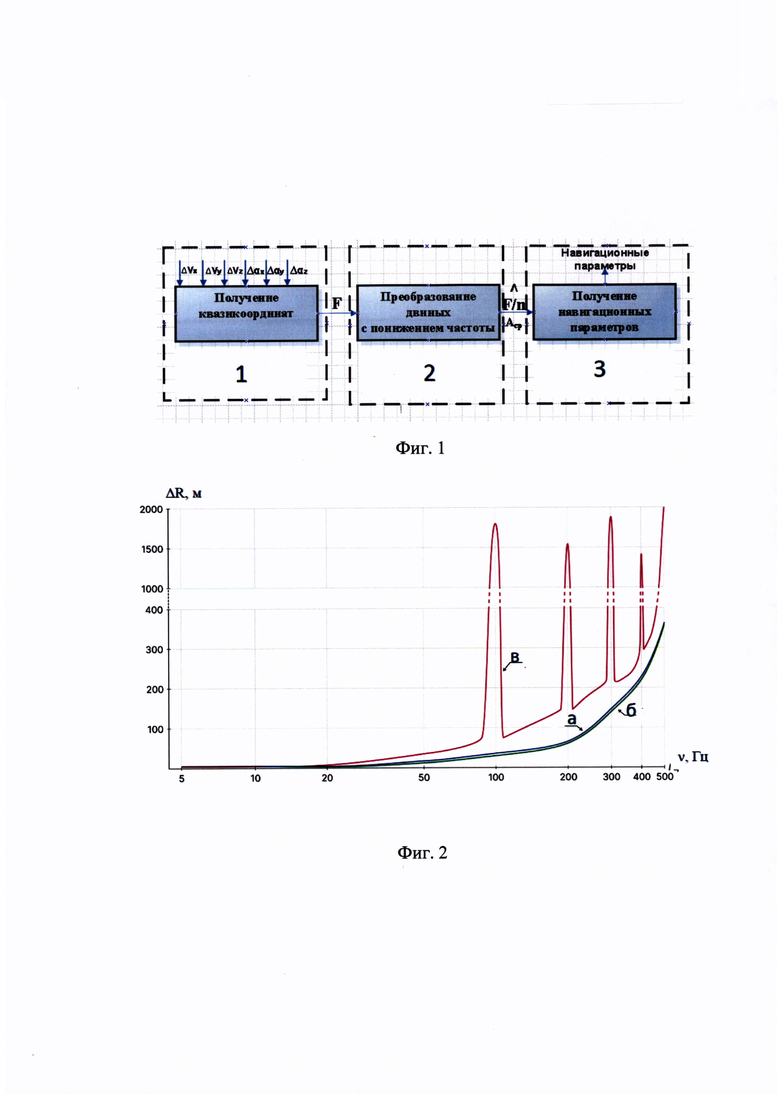
на фиг. 1 - блок-схема, поясняющая последовательность операций для реализации предложенного способа, где 1 - блок получения данных об ускорении объекта, 2 - блок проектирования данных об ускорении объекта на пространственные оси вспомогательной системы координат, 3 - блок вычисления навигационных параметров;
на фиг. 2 - графики зависимости плановой погрешности вычисленных координат ΔR от частоты вибрации v, где частота вибрации представлена по горизонтальной оси в логарифмическом масштабе, кривая а - погрешность прототипа, кривая б - погрешность предлагаемого способа, кривая в - погрешность простого суммирования.
Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе реализуется следующим образом.
Предварительно проведем его теоретическое обоснование.
Задача снижения частоты, передаваемой из блока чувствительных элементов БИНС информации, может быть решена путем формирования по каждому датчику из каждых N быстрых (с частотой F) показаний одного эквивалентного квазипоказания. Сформированные квазипоказания передаются с частотой F/n в блок навигации и, таким образом, осуществляется понижение частоты передачи информации. Алгоритм получения квазипоказаний является фактически алгоритмом осреднения на некотором интервале времени приращений углов и ускорений, получаемых по показаниям гироскопов и акселерометров, с учетом изменения ориентации БЧЭ на этом интервале.
В работе [2] приводится алгоритм получения квазипоказаний на основе уравнения Борца [3] для вектора ориентации. Вектор U квазипоказаний акселерометров получаются по векторному соотношению
 ,
,
где:
N - число быстрых шагов в одном медленном;
n - текущий быстрый шаг;
αsN - вектор сумм показаний интегрирующих акселерометров на всем медленном шаге;
VsN - вектор сумм показаний интегрирующих гироскопов на всем медленном шаге;
Vsn - вектор сумм показаний интегрирующих гироскопов на первых n быстрых шагах;
Δαn вектор показаний интегрирующих акселерометров на nом быстром шаге;
Δvn - вектор показаний интегрирующих гироскопов на nом быстром шаге;
х - символ векторного произведения;
dt - интервал дискретности.
Вектор с квазипоказаний гироскопов получаются по векторному соотношению
 .
.
Согласно способу-прототипу с приборных осей считываются показания акселерометров Δαx, Δαy, Δαz и гироскопов ΔVx, ΔVy, ΔVz и на этих же осях производится их осреднение по формулам (1) и (2). Квазипоказания с пониженной частотой на осях географческой системы (она же сопровождающий трехгранник СТГ) вычисляются параметры навигации.
Однако, такой способ требует большого времени вычислений и, соответственно, применения быстродействующего компьютера.
Предлагается другой алгоритм понижения частоты передачи информации от БЧЭ в блок навигации, который имеет ряд преимуществ. Для определенности будем полагать, что в качестве элементов ориентации используются кватернионы, но все рассуждения справедливы и для матриц [4].
Суть проблемы в том, что, если отсутствует информация в БЧЭ о координатах, то невозможно осуществить в БЧЭ проектирование на оси СТГ показаний акселерометров, а если проектирование осуществлять в блоке навигации, то надо с большой частотой передавать информацию об ориентации по каналу связи. Решить эту проблему можно, если осуществлять проектирование показаний акселерометров в два этапа, в начале спроектировать их на вспомогательную систему, неподвижную в инерциальном пространстве, а затем с нее на СТГ.
В качестве вспомогательной системы берется система, совпадающая в начальный момент с приборной системой и далее остающуюся неподвижной в инерциальном пространстве. Абсолютную угловую скорость вращения приборной системы относительно вспомогательной измеряют с помощью лазерного гироскопа (ЛГ) и взаимную ориентацию двух систем можно найти из решения кинематического кватернионного уравнения [5], [6]

где:
Ω (0,Δαx/dt, Δαy/dt, Δαz/dt) - кватернион, составленный из проекций на оси приборной системы ее абсолютной угловой скорости (измеряется гироскопами), dt - интервал дискретности;
∧ - кватернион ориентации.
При большой частоте опроса для получения кватерниона ориентации можно воспользоваться приближенным соотношением [5]

где:
∧1 - кватерниона ориентации на текущем шаге;
∧i-1 - кватерниона ориентации на предыдущем шаге;
р - кватернион, составленный из показаний ЛГ.
Проектирование показаний акселерометров на вспомогательную систему осуществляется с помощью вычисленного кватерниона ориентации по известному соотношению [5].

где:
∧ - кватерниона ориентации;
 сопряженный кватернион;
сопряженный кватернион;
An(0,Ax,Ay,Az) - кватернион составленный из проекций акселерометров на приборные оси системы, и на оси вспомогательной системы;
Ав(0,Авх,Аву,Aвz) - кватернион составленный из проекций акселерометров на оси вспомогательной системы.
Проекции ускорений на вспомогательную систему меняются относительно медленно, так как эти изменения зависят только от вращения Земли и движения носителя по ее поверхности и не зависят от быстрых изменений ориентации приборной системы. Из этого следует, что замена мгновенных проекций показаний акселерометров на средние на каком-то ограниченном интервале времени не должна привести к заметным погрешностям при их дальнейшем использовании в задаче навигации. Это предположение было подтверждено в экспериментах.
Полученные в БЧЭ проекции акселерометров на оси вспомогательной системы суммируются в течение n быстрых тактов для получения средних значений (квазипоказаний акселерометров)

где:
Аср - проекции БЧЭ акселерометров на оси вспомогательной системы.
В конце суммирования средние значения проекций акселерометров и кватернион ориентации ∧, соответствующий середине интервала суммирования, передаются в блок навигации.
Таким образом, частота передачи по линии связи получается в n раз меньше частоты опроса и счета в БЧЭ. Для еще большего сокращения объема информации можно передавать только три компоненты кватерниона, восстанавливая четвертую, исходя из единичности нормы.
В блоке навигации осуществляется проектирование средних показаний акселерометров из вспомогательной системы в СТГ. Пусть это проектирование осуществляется посредством кватерниона q, вычисление которого показано ниже.
По проекциям акселерометров на СТГ реализуется обычный алгоритм начальной выставки методом гирокомпасирования и алгоритм навигации с получением скоростей, координат и другой навигационной информации.
В ходе начальной выставки определяется начальная ориентация приборной системы относительно СТГ, совпадающая с начальной ориентацией относительно СТГ вспомогательной системы, то есть определяется начальное значение кватерниона qнач. Дальнейшие значения кватерниона q вычисляются с учетом того, что СТГ поворачивается относительно вспомогательной системы с абсолютной угловой скоростью w(wx,wy,wz), которая может быть вычислена в алгоритме навигации. Этот поворот происходит как из-за вращения Земли, так и из-за вращения носителя по ее поверхности. Текущее значение кватерниона q определяется рекуррентным соотношением

где:
qi - кватерниона ориентации на текущем шаге;
qi-1 - кватерниона ориентации на предыдущем шаге;
s(1,-wx*dt/2,-wy*dt/2,-wz*dt/2) - кватернион поворота СТГ;
Кватернион q характеризует текущую ориентацию вспомогательной системы относительно СТГ, но, практически, всегда необходима информация об ориентации приборной системы относительно СТГ. Соответствующий кватернион r получается из соотношения

где:
∧ - кватернион, переданный из БЧЭ.
На фиг. 1 представлена блок-схема вычислительного процесса по предложенному способу.
По сравнению со способом-прототипом здесь появляется операция, обозначенная как блок 2 вычислений на вспомогательных осях, но сами вычисления гораздо проще и требуют от процессора меньшей производительности.
Алгоритм, представленный выше, был проверен на наиболее сложном для БИНС движении конической вибрации (колебаниях вокруг двух горизонтальных осей со сдвигом фаз 90°). Коническая вибрация моделировалась математически, ее амплитуда составляла 20 угловых секунд, а частота могла быть задана любой. С заданной частотой вибрации и постоянной частотой опроса датчиков 1000 гц формировался получасовой массив показаний акселерометров и гироскопов, который затем обрабатывался с коэффицентом деления 10 по алгоритму понижения частоты способа-прототипа и по предложенному алгоритму, а также по алгоритму простого суммирования (квазипоказания представляют собой средне арифметическое из 10 отсчетов для акселерометров и сумму 10 отсчетов для интегрирующих гироскопов). В конечном итоге по алгоритму навигации получались погрешности плановых координат при полу часовом воздействия вибраций на БЧЭ БИНС.
На фиг. 2 представлены графики зависимости плановой погрешности вычисленных координат ΔR от частоты вибрации v. Частота вибрации представлена по горизонтальной оси в логарифмическом масштабе:
- кривая 1 погрешность прототипа;
- кривая 2 погрешность предлагаемого метода;
- кривая 3 погрешность простого суммирования.
Из графиков следует, что при вибрации предлагаемый способ примерно на 20% точнее способа-прототипа. К тому же, он требует примерно в 7 раз меньше машинного времени. Расчет одной точки по алгоритму прототипа требует 175 мс, а по предложенному методу 25 мс. Выигрыш в быстродействии происходит потому, что применение вспомогательной системы координат позволило заменить сложные вычисления по векторным соотношениям (1) и (2) на приборных осях простыми вычислениями средних арифметических на осях вспомогательной системы.
Что касается метода простого суммирования, то он требует всего 2 мс, но не удовлетворителен по точности. Если на малых частотах он дает хорошие результаты, то начиная с частоты пониженных квазипоказаний (100 гц) наблюдаются резонансные всплески погрешности почти на порядок.
Таким образом, предлагаемый способ обеспечивает достижение требуемого технического результата, который заключается в повышении точности и надежности определения ориентации объекта в бесплатформенной инерциальной навигационной системе с одновременным расширением арсенала технических средств, используемых для определения ориентации объекта в подобных системах.
Литература
1. P.P. Биккенин, М.Н. Чесноков. Теория электрической связи. - М: Издательский центр «Академия», 2010.
2. D. Titterton, J. Weston. Strapdown Inertial Navigation Technology. 2004.
3. A.B. Молоденков и др. Аналитические решения в задаче Дарбу, уравнении Борца и подход к алгоритму ориентации на их основе. ПММ 2019, т. 83, №4.
4. В.Н. Бранец, И.П. Шмыгловский. Применение кватернионов в задачах ориентации твердого тела. - М: Наука 1973.
5. В.В. Матвеев, В.Я. Распопов. Основы построения бесплатформенных инерциальных навигационных систем. ЦНИИ «ЭЛЕКТРОПРИБОР», С-П, 2009.
6. О.Н. Анучин, Г.И. Емельянцев. Интегрированные системы ориентации и навигации для морских подвижных объектов. ЦНИИ «ЭЛЕКТРОПРИБОР», С-П, 2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| СПОСОБ ВЫСТАВКИ МОРСКОЙ БИНС | 2014 |
|
RU2572651C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| НАВИГАЦИОННО-ПИЛОТАЖНЫЙ КОМПЛЕКС | 2016 |
|
RU2634083C1 |
Изобретение относится к приборостроению и может быть использовано для создания бесплатформенных инерциальных навигационных систем. Сущность предлагаемого способа заключается в проектировании данных об ускорении объекта на оси сопровождающего трехгранника, которое последовательно проводится в два этапа. На первом этапе формируют n проекций получаемых от акселерометров данных об ускорении объекта на пространственные оси вспомогательной системы координат, совпадающей в начальный момент с приборной системой координат и остающейся далее неподвижной в инерциальном пространстве. На втором этапе после формирования n проекций получаемых от акселерометров данных об ускорении объекта на координатные оси вспомогательной системы определяют среднее значение из n проекций данных на координатные оси вспомогательной системы. Затем полученные данные передают в навигационный вычислитель для проектирования на оси сопровождающего трехгранника и вычисления по ним навигационных параметров, характеризующих ориентацию объекта в бесплатформенной инерциальной навигационной системе. Техническим результатом заявленного способа является повышение точности и надежности определения ориентации объекта с одновременным расширением арсенала технических средств. 2 ил.
Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе, включающий проектирование данных об ускорении объекта на оси сопровождающего трехгранника, отличающийся тем, что проектирование данных об ускорении объекта на оси сопровождающего трехгранника проводят последовательно в два этапа, при этом на первом этапе формируют n проекций получаемых от акселерометров данных об ускорении объекта на пространственные оси вспомогательной системы координат, совпадающей в начальный момент с приборной системой координат, связанной с ней через кватернион измеренных гироскопами составляющих угловой скорости и остающейся далее неподвижной в инерциальном пространстве, а на втором этапе после формирования n проекций получаемых от акселерометров данных об ускорении объекта на координатные оси вспомогательной системы определяют среднее значение из n проекций данных на координатные оси вспомогательной системы, преобразуют полученные данные с понижением частоты, после чего передают их в навигационный вычислитель для проектирования на оси сопровождающего трехгранника и вычисления по ним навигационных параметров, характеризующих ориентацию объекта в бесплатформенной инерциальной навигационной системе.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2019 |
|
RU2725029C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРИЕНТАЦИИ И НАВИГАЦИИ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 2003 |
|
RU2256881C2 |
| US 0010718614 B2, 21.07.2020 | |||
| CN 106595711 A, 26.04.2017. | |||

