Настоящее изобретение относится к газотурбинным двигателям, и в частности, оно касается авиационных реактивных двигателей.
Существуют самые разнообразные варианты управления реактивными двигателями, которые в настоящем описании называются просто двигателями. При нормальной эксплуатации двигателя не возникает никаких проблем. Однако в некоторых случаях, таких как стендовые испытания двигателей, возникает необходимость использования самого разного оборудования, и даже разных испытательных стендов, каждый из которых предназначен для испытания конкретного типа двигателя, а это в конечном счете требует значительных капиталовложений.
В качестве ближайшего технического решения следует указать систему для передачи степени повышения давления в компрессоре газотурбинного двигателя (см., например, патент US 44662"78), содержащую преобразователь, предназначенный для модификации степени повышения давления в соответствии с оптимальными значениями для конкретной турбины в соответствии с определенными требованиями. Информация из преобразователя передается сельсин-датчиком (синхропередатчиком) и принимается дифференциальным датчиком, связанным с управляемым двигателем. Дифференциальный датчик управляется в соответствии с требуемым давлением и температурой, чтобы обеспечить данные степени давления, которые корректируются в соответствии с фактическим данными температуры и давления. Дифференциальный датчик также управляется для формирования выходного сигнала, который затем изменяется в соответствии с изменением оптимальных значений степени повышения давления в компрессоре газотурбинного двигателя для конкретной турбины, связанной с дифференциальным датчиком. Сигнал дифференциального датчика используется для передачи сигнала степени повышения давления в компрессоре газотурбинного двигателя, который изменяется искусственно для того, чтобы близко аппроксимировать номинальное оптимальное значение при различных условиях давления и температуры, несмотря на изменения рабочих характеристик двигателя, имеющего определенную степень повышения давления в компрессоре. Поэтому степень повышения давления в компрессоре газотурбинного двигателя, определяемая системой, компенсируется для того, чтобы получить максимальную эффективность при фиксированном номинальном значении, которое одинаково для всех турбин, установленных на летательном аппарате, в широком диапазоне давлений и температур.
Технической задачей настоящего изобретения является улучшение данной ситуации путем упрощения оборудования для испытания конкретного типа двигателя и в конечном счете уменьшения капиталовложений.
Согласно настоящему изобретению предложено устройство управления газами для авиационного газотурбинного двигателя, содержащее блок управления, выполненный с возможностью воздействия на собственное управление газотурбинного двигателя (МТ1-МТ3) в зависимости от входного сигнала ручного управления, определенного органом ручного управления, в котором орган ручного управления выполнен с возможностью подачи сигнала углового положения рукоятки в виде напряжения, в частности, постоянного напряжения.
Согласно основному отличительному признаку настоящего изобретения блок управления характеризуется тем, что содержит автоматический выключатель, выполненный с возможностью преобразования сигнала углового положения рукоятки в трансформированный сигнал углового положения в соответствии с выбранным законом управления, и по меньшей мере один интерфейс, выполненный с возможностью преобразования трансформированного сигнала углового положения в два синусоидальных сигнала, в частности, преобразователя, что обеспечивает управление различными газотурбинными двигателями при помощи одного и того же устройства, в частности, газотурбинными двигателями, использующими для собственного управления сигналы синусоидального типа.
Согласно предпочтительному варианту воплощения настоящего изобретения устройство дополнительно содержит приводной модуль, выполненный с возможностью приема на входе трансформированного сигнала углового положения и с возможностью выдачи на выходе команды управления газотурбинных двигателей с гидромеханическим управлением, при этом автоматический выключатель выполнен с возможностью автоматического регулирования приводного модуля, содержащего двигатель и редуктор. Предпочтительно приводной модуль выполнен с возможностью электромеханического воздействия на рычаг регулятора газотурбинного двигателя с гидромеханическим управлением, и, кроме того, автоматический выключатель обеспечивает возможность управления рычагом приводного модуля.
Как вариант, интерфейс на основе сигнала возбуждения, переданного регулятором газотурбинного двигателя, обеспечивает преобразование трансформированного сигнала углового положения в два синусоидальных сигнала, передаваемых на регулятор газотурбинного двигателя, который для собственного управления использует сигналы синусоидального типа.
Предпочтительно трансформированный сигнал углового положения содержит либо линейный сигнал, либо два тригонометрических сигнала.
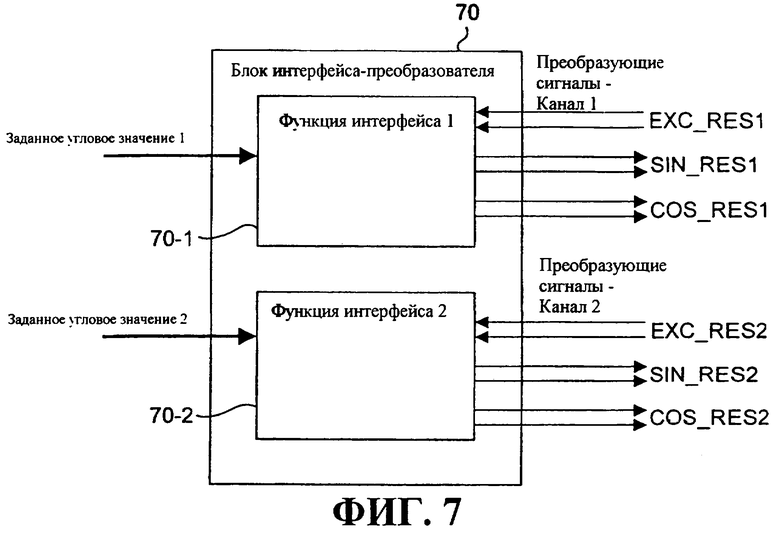
Целесообразно, чтобы автоматический выключатель был выполнен с возможностью выдачи по меньшей мере двух трансформированных сигналов углового положения на интерфейс (70), при этом интерфейс (70) выполнен с возможностью выдачи по меньшей мере четырех синусоидальных сигналов (COS-RES1, SIN-RES1; COS-RES2, SIN-RES2), передаваемых на регулятор избыточного типа газотурбинного двигателя (МТ3).
Предпочтительно трансформированный сигнал углового положения (TRA) содержит сигнал напряжения для регулятора газотурбинного двигателя (МТ2), управляемого при помощи значений напряжения.
Выгодно, чтобы орган ручного управления содержал рукоятку (CL) или мини-ручку-джойстик (10JS).
Полезно, чтобы орган ручного управления содержал средство управления экстренной остановкой, в частности, нажимную кнопку (SL, 10SL).
Целесообразно, чтобы устройство содержало операторский интерфейс (IHM), который был выполнен с возможностью обеспечения для оператора выбора и добавления используемого закона управления, а также ввода и изменения параметров органа ручного управления.
Полезно, чтобы параметры органа ручного управления содержали ход органа ручного управления, положение упоров рукоятки, требуемое значение углового положения, ускорение на угловую единицу и замедление на угловую единицу.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает принципиальную схему испытательного стенда, для работы на различных типах двигателей, указанных на схеме, согласно изобретению;
фиг.2 - более подробную принципиальную схему стенда согласно изобретению;
фиг.3 - принципиальную схему испытательного стенда, для работы на различных типах двигателей, согласно изобретению;
фиг.4 - схему обмена сигналами между генератором синусоидальных сигналов испытательного стенда и вычислительным устройством первого типа, согласно изобретению;
фиг.5 - схему обмена сигналами между генератором синусоидальных сигналов испытательного стенда и вычислительным устройством второго типа, согласно изобретению;
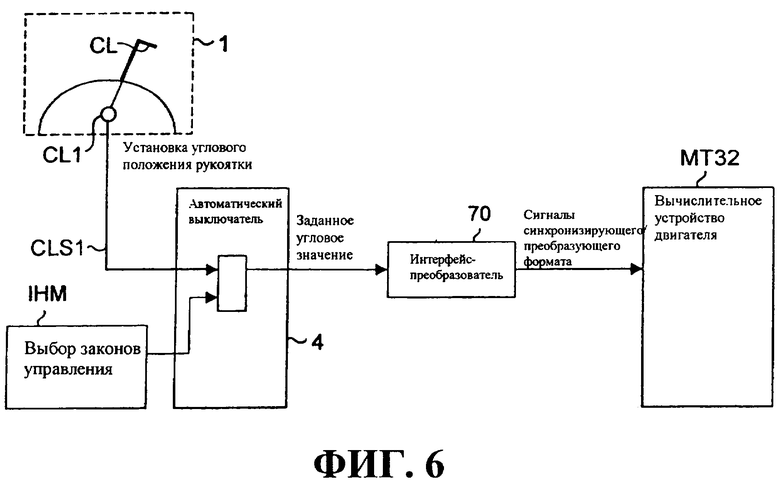
фиг.6 - принципиальную схему испытательного стенда для двигателя с управлением синусоидальными сигналами, согласно изобретению;
фиг.7 - схему генератора синусоидальных сигналов испытательного стенда для работы с вычислительным устройством второго типа, согласно изобретению;
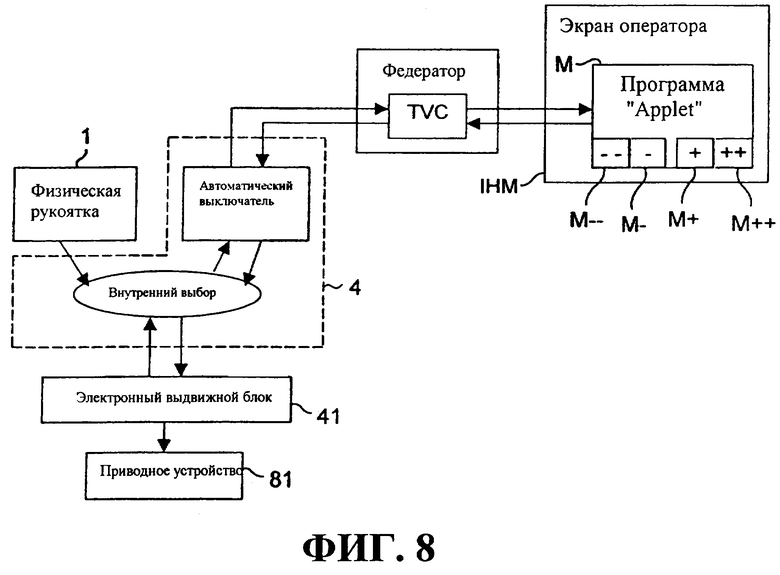
фиг.8 - принципиальную схему испытательного стенда, содержащего операторский интерфейс, согласно изобретению;
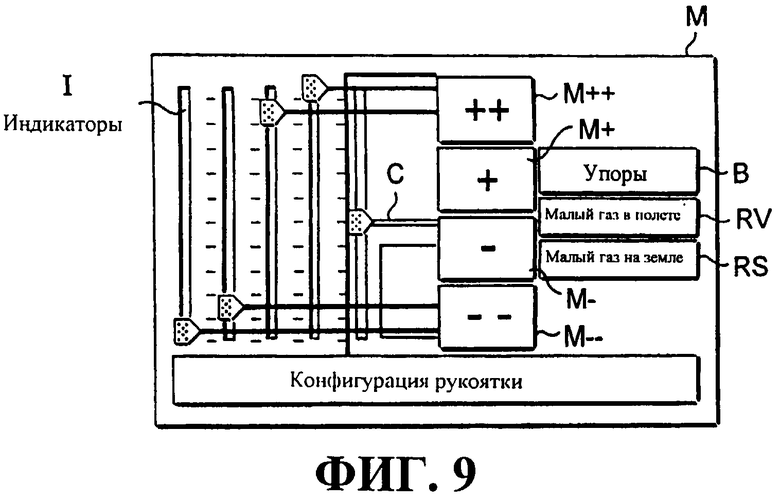
фиг.9 - схему выполнения операторского интерфейса, согласно изобретению;
фиг.10 - схему последовательности блоков, используемых в логических блок-схемах логических схем автоматического выключателя, согласно изобретению;
фиг.11А - 11С - логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие получение запросов от оператора, согласно изобретению;
фиг.12А и 12В - другие логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие получение запросов от оператора, согласие изобретению;
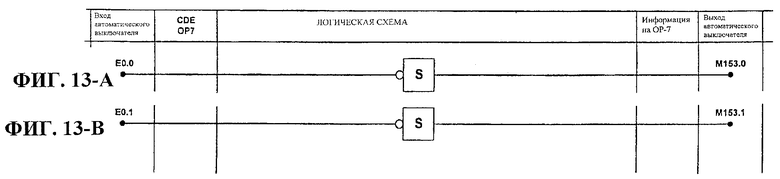
фиг.13А и 13В - логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие управление сбоями, согласно изобретению;
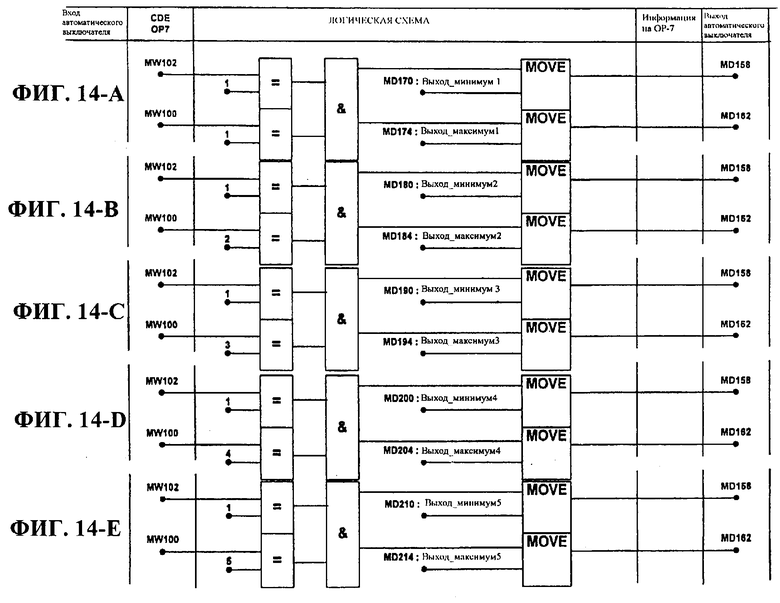
фиг.14А - 14Е - пять логических схем автоматического выключателя, представленных в виде логических блок-схем и обеспечивающих получение параметров двигателя, согласно изобретению;
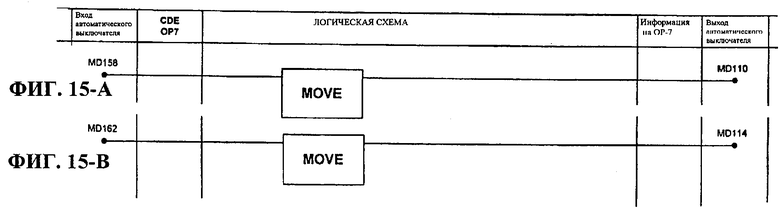
фиг 15А и 15В - первые логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие получение минимального и максимального значений углов рукоятки для выбранного двигателя, согласно изобретению;
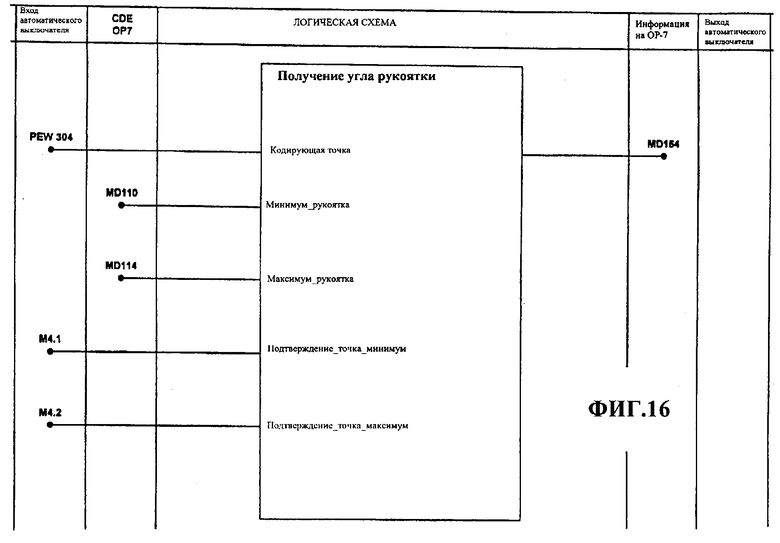
фиг.16 - вторую логическую схему автоматического выключателя, представленную в виде логической блок-схемы и обеспечивающую получение угла рукоятки на основании сигнала от потенциометра рукоятки, согласно изобретению;
фиг.17А - 17С - три логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие на выходе вычисления угла рукоятки в градусах или радианах, согласно изобретению;
фиг.18А - 18D - две логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие вычисление и масштабирование косинусов и синусов на основании выходных значений, согласно изобретению;
фиг.19A и 19В - две логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие копирование команды управления двигателем в масштабе закона двигателя и копирование команды управления двигателем в заданном масштабе для системы сбора данных ACQ, согласно изобретению;
фиг.20А - 20G - логические схемы автоматического выключателя, представленные в виде логических блок-схем и обеспечивающие подачу аналоговых выходных сигналов автоматического выключателя, в частности, для дополнительного вычислительного устройства, согласно изобретению;
В настоящем изобретении рассматривается модульный комплекс, обеспечивающий управление газами реактивных двигателей (электромагнитное или электрическое управление). Управление газами может осуществляться тремя способами в зависимости от типа регулирования реактивного двигателя:
при помощи приводного устройства - электромагнитное управление регулированием реактивного двигателя;
при помощи синусоидальных сигналов синхронизирующего и преобразующего типа, подаваемых непосредственно на вычислительные устройства реактивного двигателя;
при помощи генерирования напряжений - специфические законы, применяемые для вычислительных устройств реактивного двигателя.
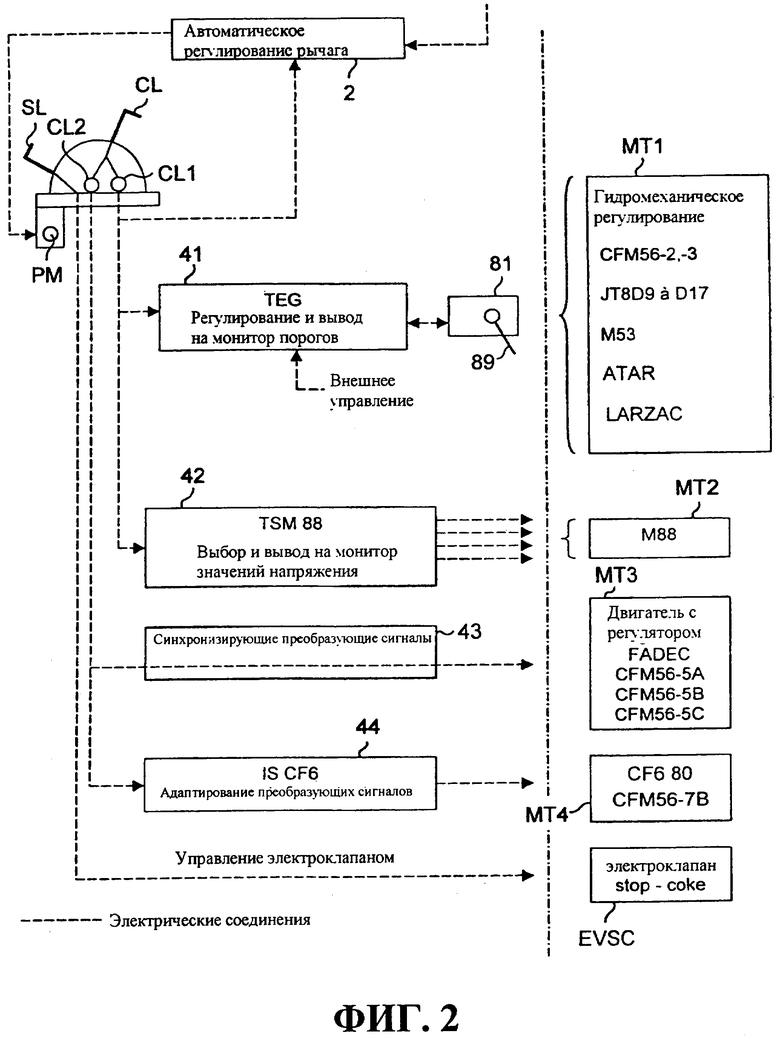
На фиг.1 представлена принципиальная схема испытательного стенда для работы на различных типах двигателей, указанных на этой схеме. На фиг.2 более подробно показана та же схема.
Устройства на фиг.1 и 2 являются частью установки, которая до настоящего времени использовалась заявителем и описание которой приводится ниже.
Орган 1 управления, используемый оператором, проводящим испытания на двигателе, содержит рычаг CL, обеспечивающий управление газами, и другой рычаг SL, обеспечивающий отсечку подачи топлива в двигатель, которая обычно осуществляется при помощи электрического клапана, называемого «stop-coke» и содержащегося в любом двигателе самолета гражданской авиации.
Дополнительно орган управления может содержать физическую рукоятку РМ для обеспечения собственно управления газами. В известном устройстве эта рукоятка РМ действует на рычаг CL через привод 2 автоматического регулирования положения, называемый «серворукояткой».
С рычагом CL взаимодействует датчик CL1 углового положения типа потенциометра. Угловое положение или его выходное значение передается электрическим путем в виде аналогового сигнале положения CLS1, в частности, в виде непрерывного потенциометрического сигнала напряжения на блок 4 управления, описанный ниже.
Кроме того, с рычагом CL может также взаимодействовать другой угловой датчик CL2 типа преобразователя, выдающий сигналы CLS2 синусоидального типа, обеспечивающие другой вариант отображения положения рычага CL. Эти сигналы в дальнейшем передаются или не передаются через модуль формирования сигналов в зависимости от типа реактивного двигателя, а затем на вычислительное устройство.
В авиационных реактивных двигателях, называемых в данном случае просто двигателями, существуют различные моды (называемые также законами) управления газами, в частности, в зависимости от класса летательного аппарата, от поколения реактивного двигателя, используемого в этих классах, и от конструктора.
Позицией МТ1 обозначен двигатель с управлением газами при помощи гидромеханического регулирования. Им может быть один из следующих двигателей: CFM56-2, CFM56-3, JT8D9 - JT8D17, М53, ATAR, LARZAC, при этом все являются двигателями, производимыми компанией заявителя. Входным органом управления газами со стороны двигателя является рычаг 89. Блок 4 управления содержит выдвижной электронный блок 41 (TEG), действующий на приводное устройство 81, которое, в свою очередь, управляет рычагом 89.
Термином «выдвижной электронный блок» обозначен модуль, который может быть выполнен в виде выдвижного ящика, содержащего электронные стойки, воздействующий на средства типа привода, регулятора и др.
Позицией МТ2 обозначен двигатель с управлением газами при помощи электрического напряжения, например, модель M88 заявителя. В этом случае блок 4 управления содержит специально выполненный для этого двигателя выдвижной блок 42 (TSM88), который предназначен для подачи соответствующего напряжения.
Позицией МТЗ обозначен двигатель с управлением газами при помощи синхронизирующего и преобразующего сигналов, в частности, для регулятора «FADEC» («Full Authority Digital Engine Control»), применяемого в двигателях CFM56-5A/5B/5C. Такие двигатели могут работать либо в режиме управления газами ECU («Engine Control Unit»), либо в режиме электронного управления EEC («Electronic Engine Control»). Такой регулятор FADEC предполагает наличие избыточного вычислительного устройства.
Обозначение МТЗ относится также к двигателям, управляющее вычислительное устройство которых не является избыточным, например, РМС («Power Management Control»), для двигателя CF6 80 С2 PMC/PMUX.
Для двигателя типа МТЗ блок 4 управления содержит ступень 43, которая может работать путем простого копирования сигналов CLS2, поступающих от рычага CL, если последний содержит синхронизирующий и преобразующий выход.
Позицией МТ4 обозначен двигатель с управлением газами при помощи синхронизирующих и преобразующих сигналов, например, двигатель CF6 80 E1 FADEC, CF680 С2 FADEC или CFM 56-7B заявителя.
В этом случае блок 4 управления содержит специальный интерфейс 44 (ISCF6), который может работать с согласованием сигналов, поступающих от рычага CL, если последний содержит синхронизирующий и преобразующий выход.
На практике элементы 1 и 4 (за исключением 89) находятся в зале управления. При необходимости использования приводного устройства 89 его устанавливают на двигателе или непосредственно рядом с ним.
Рычаг-рукоятка управления CL должен обеспечивать следующие функции, некоторые из которых уже упоминались:
формирование электрического сигнала, являющегося функцией углового положения рычага-рукоятки;
передачу сигналов управления в виде двух синхронизирующих сигналов на вычислительные устройства реактивного двигателя (FADEC);
позиционирование рычага в точном угловом положении (в частности, в режимах малого газа, полного газа, форсажа) посредством регулируемых упоров;
быстрое ускорение посредством гашетки снятия упоров;
тонкую регулировку (демультипликацию) приводом перемещения рычага;
отсечку подачи топлива рычагом управления (для управления электроклапаном stop-coke).
В блоке 4 соответствующий элемент из 41-44 обеспечивает следующие функции:
принимает электрический сигнал от рукоятки управления и выводит на монитор угол привода;
выдает регулируемые сигналы пороговых значений (сухие контакты) в зависимости от угла рукоятки;
осуществляет автоматическое регулирование приводного устройства;
выдает сигнал копирования положения приводного устройства (0-10 В постоянного тока);
в случае необходимости принимает внешний управляющий сигнал 0-10 В постоянного тока для управления приводным устройством (вместо рукоятки);
обеспечивает корректировку параметров рукоятки управления и приводного устройства (настройка на ноль градусов) и осуществление регулировок (набор мощности, максимальная мощность, привод, пороги и т.д.);
обеспечивает управление возвращением в режим малого газа приводного устройства при превышении момента приводного устройства;
обеспечивает дистанционное управление переводом приводного устройства в исходное положение по запросу оператора.
Наконец, приводное устройство, содержащее двигатель или редуктор, выполняет следующие функции:
обеспечивает управление реактивными двигателями с гидромеханическим регулированием при помощи электромеханического воздействия на рычаг регулятора реактивного двигателя;
возвращает, в случае необходимости, рычаг регулятора реактивного двигателя в положение малого газа (обеспечение безопасности) по запросу оператора через выдвижной блок автоматического регулирования и управления мощностью, при отключении электрического питания приводного устройства или при обнаружении превышения момента.
В зависимости от типов реактивных двигателей могут использоваться различные варианты приводных устройств (в частности, воздействующие на ход, крутящий момент или момент возврата в режим малого газа).
Для вариантов, показанных на фиг.1 и 2, можно также предусмотреть:
электронный выдвижной блок автоматизации рычага-рукоятки (автоматическое регулирование рычага-рукоятки управления), обеспечивающий осуществление циклического управления (или управления в автоматическом режиме) и в то же время оставляющий оператору возможность в любой момент взять на себя управление реактивным двигателем;
специальный электронный выдвижной блок генерирования законов двигателя М88 с функцией отслеживания и вывода на монитор значений выходных сигналов напряжения.
Кроме того, необходимо уточнить закон управления. Вовсе не обязательно, чтобы двигатель подчинялся команде от органа управления таким же образом, как и другой двигатель той же категории или другой категории.
Кроме того,
выдвижной блок 41 содержит вход внешнего управления для регулирования и вывода на монитор пороговых сигналов;
если речь идет об устройстве, входящем в состав двигателя М88, то для этого двигателя может быть использован специальный выдвижной блок 42;
аналогично ступень 43 может быть специально выполнена для регулятора, называемого FADEC;
наконец, интерфейс 44 может быть адаптирован для специально двигателя CF6.
Чрезвычайное значение имеет точность закона управления. Действительно, любая неточность в цепи управления может привести к повреждению и даже к разрушению двигателя, в то время как его испытания преследуют совершенно другой результат.
Элементы 41-44 могут быть выполнены следующим образом:
выдвижной блок 41 содержит стойку автоматического регулирования положения приводного устройства 81;
специальный выдвижной блок 42 содержит специальную стойку для М88, обеспечивающую деление управляющего напряжения на четыре аналоговых сигнала управления двигателем;
в описанном варианте выполнения ступень 43 является простой передачей сигналов, поступающих от рычага LC;
интерфейс 44 содержит стойку, обеспечивающую смещение закона управления газами и адаптированную к закону управления двигателем.
Установка, показанная на фиг.1 и 2, обеспечивает следующие возможности:
обеспечивает удержание рычага-рукоятки ручного управления в положении при помощи регулируемого тормоза;
эргономичность рычага-рукоятки ручного управления, аналогичного рукоятке управления на самолете, т.е. прочность, легкость манипулирования;
выполняет функции обеспечения безопасности, такие как механизм автоматического возврата в режим малого газа, интегрированный в приводное устройство, при обнаружении превышения момента, или возврата при подаче внешней команды (команда оператора на выдвижной блок автоматического регулирования или установление сухого контакта путем нажатия оператором кнопки);
обеспечение блока управления запасным питанием от источника напряжения 28 вольт.
Вместе с тем она имеет ряд неудобств, связанных с типами реактивных двигателей:
сложная многомодульная конструкция, зависящая от типов реактивных двигателей, то есть установка, в частности, ее блок 4 содержит тем большее количество элементов, чем больше разных типов реактивных двигателей необходимо испытать на стенде;
слабая гибкость, так как всякий раз, когда требуется испытать новый тип реактивного двигателя, приходится разрабатывать новые адаптативные варианты.
В результате повышаются инвестиционные затраты, тем более что постоянно возрастает потребность в проведении испытаний все большего числа двигателей.
Кроме того, в настоящее время необходимо проводить периодические проверки ресурса в автоматическом режиме (требования Журнала летно-эксплуатационных нагрузок). Осуществление таких проверок может быть обеспечено путем добавления опции «выдвижной блок автоматизации». Это тоже увеличивает затраты, усложняет применение и обслуживание, а также снижает надежность работы комплекса в целом из-за увеличения числа специальных выдвижных блоков.
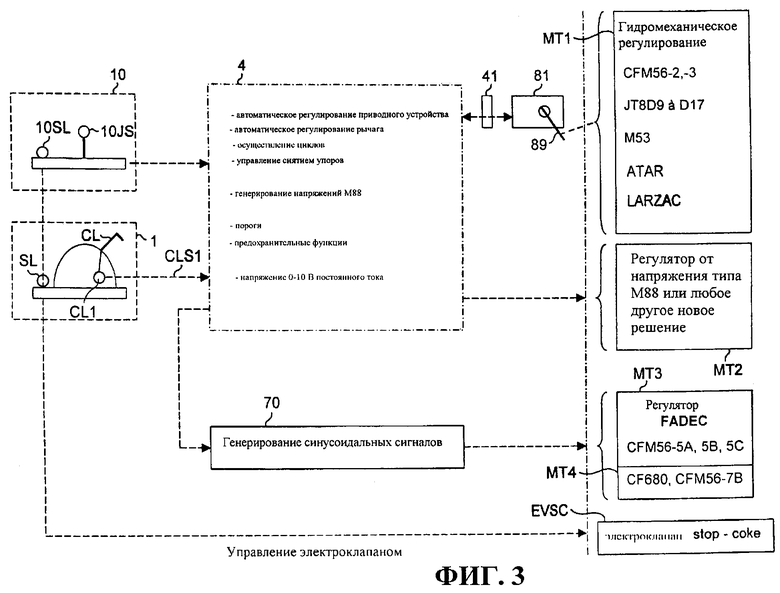
Изучая опыт проведения тяговых испытаний, заявитель заметил, что вместо использования множества модулей, представленных на фиг.1 и 2, можно осуществить вариант (фиг.3), который объединяет такие же функции в одном модуле управления, содержащем автоматический выключатель и выполненном с возможностью обеспечения адекватного соотношения между операторской величиной, определяемой органом ручного управления, и приводной величиной, воспринимаемой двигателем на стенде, причем с учетом закона управления, применяемого именно для данного двигателя.
Автоматический выключатель 4 может работать с модулем 1 ручного управления, аналогичным органу ручного управления 1, представленному на фиг.1 и 2, при этом отпадает необходимость в использовании дополнительного датчика CL2, выдающего преобразующие сигналы.
Автоматический выключатель 4 может также работать с цифровым модулем 10 ручного управления, приводимым в действие рукояткой или мини-ручкой управления («джойстик») 10JS. Предпочтительно ее дополняют кнопкой 10SL для управления отсечкой подачи топлива.
Если одновременно используют модуль 1 ручного управления и цифровой модуль 10 ручного управления, то кнопки SL и 10SL могут быть подсоединены в параллель. Электроклапан «stop-coke» (не показан) может рассматриваться как общий для всех типов гражданских авиационных двигателей, проходящих стендовые испытания.
Аналоговый угловой выход автоматического выключателя (фиг.3) 4 соединен с генератором 70 синусоидальных сигналов (преобразованных) (который может рассматриваться как встроенный в автоматический выключатель 4).
На самом деле генерирование преобразованных сигналов является одной из встречающихся трудностей, когда требуется реализовать «универсальную» систему ручного управления, которая может работать с самыми разнообразными устройствами собственного управления газами двигателей.
Выходящий из модуля 1 (фиг.6) (или 10) ручного управления сигнал CLS1 углового положения рукоятки, например, в виде постоянного напряжения поступает в автоматический выключатель 4. Последний преобразует этот сигнал в трансформированный сигнал углового положения, что будет подробнее пояснено ниже. Преобразование состоит в следующем:
применение закона управления двигателем, который может быть выбран оператором через операторский интерфейс, например, операторский интерфейс IHM, описание которого следует ниже;
преобразование углового диапазона TLA физического хода рукоятки (от -90° до +90°) в угол TRA для вычислительного устройства (например, от 38° до 85,5°).
Этот трансформированный сигнал углового положения TRA называют также сигналом заданного углового значения на выходе автомата. Этот сигнал подается на генератор 70 синусоидальных сигналов, называемый также «интерфейсом-преобразователем». Этот «интерфейс-преобразователь» на основании заданного углового сигнала позволяет генерировать два синусоидальных сигнала для регулятора МТ3 двигателя, в частности, для вычислительного устройства МТ32 регулятора двигателя.
В настоящем описании используются следующие обозначения:
«TRA» («Throttle Resolver Angle») является розовым обозначением заданного значения угла управления газами;
«TRA_DC10» обозначает аналоговый сигнал от 0 до +10 вольт, отображающий угол TRA в диапазоне, например, от -90 до 90°;
«TRA_Sin10» и «TRA_Cos10» обозначают два аналоговых сигнала, каждый от 0 до +10 вольт, отображающих соответственно синус и косинус угла TRA в диапазоне от -1 до +1, при этом данные сигналы позволяют работать в угловом диапазоне от 0° до 180°;
«TLA» обозначает значение угла управления газами.
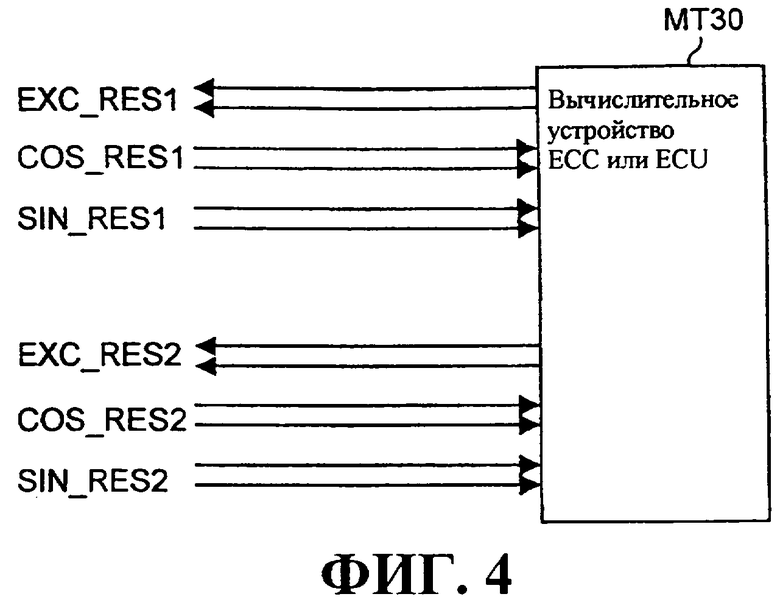
Следует напомнить, что регулятор, называемый «FADEC», по своей сущности предполагает наличие избыточного вычислительного устройства в двигателе, который может работать либо в режиме ECU, либо в режиме EEC. Как показано на фиг.4, соответствующий входной интерфейс со стороны двигателя, обозначаемый МТ30, имеет два канала:
канал 1, активируемый синусоидальным сигналом возбуждения EXC_RES1, поступающим от МТЗО, находится в ожидании поступлений двух сигналов COS_RES1 и SIN_RES1, модулирующих сигнал EXC_RES1 соответственно в зависимости от косинуса и синуса угла TRA с точностью до одного множителя;
канал 2 осуществляет то же самое в режиме избыточности с сигналами возбуждения EXC_RES2 и обратными сигналами COS_RES2 и SIN_RES2.
Такая избыточность отвечает требованию безопасности и надежности.
Обычно:
EXC_RESi: 7,07 вольт (±2,0%) при 3000 Гц (±10%)
К=0,492 (±0,025%)
EXC_SINi=К · EXC_RESi · sin(TRA)
EXC_COSi=К · EXC_RESi · cos(TRA)
На фиг.7 показан блок интерфейс-преобразователь, предназначенный для работы с избыточным регулятором сигналов. Этот блок содержит два интерфейса-преобразователя 70-1 и 70-2, каждый из которых на входе принимает сигнал углового значения от автомата. Последний содержит два аналоговых выхода, каждый из которых соединен с отдельным интерфейсом-преобразователем.
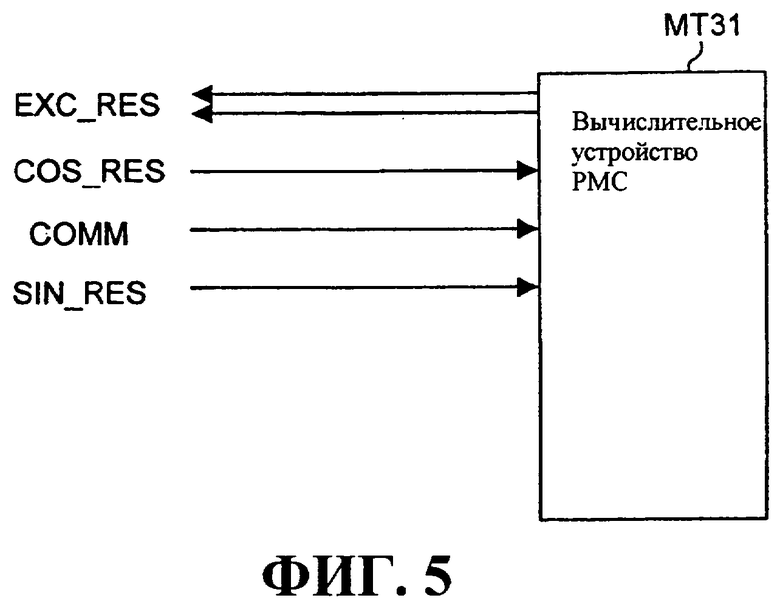
Для двигателя с вычислительным устройством РМС (фиг.5) принцип избыточности не применяется. Работа происходит аналогичным образом с сигналами возбуждения EXC_RES и обратными сигналами COS_RES и SIN_RES при наличии общего проводника, соединенного с массой и обозначаемого СОММ.
Обычно:
EXC_RES: 7,07 вольт (±2,0%) при 3000 Гц (±10%)
EXC_SIN=EXC_RES · sin(TRA)
EXC_COS=EXC_RES · cos(TRA)
Если заданный сигнал на выходе автомата является линейным сигналом типа «TRA_DC10», интерфейс-преобразователь 70 переводит этот сигнал в масштаб -90°, +90° и выдает синусоидальные сигналы типа
EXC_SINi=К · EXC_RESi · sin(масштабированный TRA-DC10)
EXC_COSi=К · EXC_RESi · cos(масштабированный TRA-DC10)
Интерфейс-преобразователь, принимающий сигнал линейного аналогового типа (такого как постоянное напряжение), может быть реализован при помощи
известных программ моделирования синхронизирующих/преобразующих сигналов, или
центрального блока, взаимодействующего с платой цифрового/преобразующего преобразования в соответствии со стандартным форматом (например, VME, VXI, PCI, ISA...), или
компонентов, используемых в области измерения и обеспечивающих цифровое/преобразующее преобразование и аналоговое/преобразующее преобразование, причем эти компоненты существуют в самых различных формах (монолит, гибрид, модуль).
Эти моделирующие программы, платы или компоненты выпускаются американскими компаниями, такими как Data Device Corporation, North Atlantic Instrument, Computer Conversion Corporation.
Если сигнал на выходе автоматического выключателя является парой тригонометрических сигналов типа «TRA_Sin10» и «TRA_Cos10», интерфейс-преобразователь 70 осуществляет перевод в масштаб от -1 до 1 и выдает синусоидальные сигналы типа
EXC_SINi=К · EXC_RESi · (масштабированный TRA_Sin10)
EXC_COSi=К · EXC_RESi · (масштабированный TRA_Cos10)
Интерфейс-преобразователь, принимающий два сигнала тригонометрического типа, может быть электронной платой, содержащей классические компоненты, обеспечивающие функции умножения аналоговых сигналов.
Как было указано выше, оператор может выбирать закон управления двигателем, то есть выбирать двигатель, с которым связан угловой диапазон, позволяющий ему масштабировать входной сигнал автоматического выключателя 4. Для этого автоматический выключатель 4 соединен с человеко-машинным интерфейсом, называемым IHM (фиг.6) и более подробно (фиг.8). Этот интерфейс служит также для быстрого визуального контроля за значениями параметров и сигналами устройства управления. Как показано на фиг.8, интерфейс может быть выполнен в виде экрана, на который выводится, например, окно М для рукоятки при помощи прикладкой программы «applet». В окно выводятся данные, такие как угловое положение рукоятки, соответствующее сигналу CLS1, поступающему в автомат, значение заданного сигнала углового положения рукоятки, положение упоров рукоятки, определяемых как:
упор малого газа на земле;
упор малого газа в полете;
упор порога 1, такой как упор взлетного режима ТАОГ (Take Off);
упор порога 2, такой как упор крейсерского режима МХСТ (Maxi Continue).
Человеко-машинный интерфейс позволяет также изменять угловое положение рукоятки путем подачи соответствующих команд на автомат. Для этого оператор может нажимать на виртуальные кнопки М++, М+, М- и М--, выведенные на экран, чтобы увеличить или уменьшить угловое положение рукоятки на основании значения, выведенного на экран. Он также может непосредственно вводить требуемое значение углового положения. Виртуальная кнопка М++ имеет шаг приращения (или градиент), больший, чем шаг приращения виртуальной кнопки М+. То же самое относится и к кнопкам М- и М--.
На фиг.9 показаны другие виртуальные кнопки, служащие для приведения рукоятки в положение упора малого газа в полете (виртуальная кнопка RV), приведения рукоятки в положение упора малого газа на земле (виртуальная кнопка RS), для указания на то, что оператор пропускает упор (виртуальная кнопка В). Положения индикаторов I, которые перемещаются по градуированным шкалам, показывают значения четырех упоров. Оператор может нажимать на виртуальные кнопки М++, М+, М- и М--, выведенные на экран, чтобы увеличить или уменьшить текущее значение С. Значения упоров малого газа на земле и в полете также могут быть изменены оператором.
Эти значения передаются на автоматический выключатель 4 компьютером типа PC, называемым федератором и используемым с качестве процессора обмена между автоматом и операторским экраном. Автоматический выключатель 4 передает эти значения на физическую рукоятку 1.
Таким образом, оператор может
выбирать и добавлять закон управления, а также
вводить и изменять параметры органа ручного управления.
Параметры органа ручного управления содержат ход органа ручного управления, положения упоров рукоятки, значение требуемого углового положения, ускорение на угловую единицу и замедление на угловую единицу, связанное либо с вводом угла непосредственно оператором, либо с вводом при помощи виртуальных кнопок М++, М+, М-, М-- (что соответствует шагу приращения), либо с положением каждого упора.
Выбор оператором закона управления двигателем состоит в выборе необходимого типа двигателя (или газотурбинного двигателя). Как показано на фиг.8, выбранный двигатель позволяет направить на электронный выдвижной блок сигнал соответствующего типа, после чего выдвижной блок 41 действует на приводное устройство 81.
На фиг.11 - 20 показан пример выполнения автоматического выключателя в виде логических схем. Человеко-машинный интерфейс типа операторского пульта, например, графический интерфейс, соединенный с автоматическим выключателем, позволяет оператору вводить данные для осуществления испытаний выбранного двигателя на испытательном стенде. Этот графический интерфейс позволяет также оператору следить за ходом испытания.
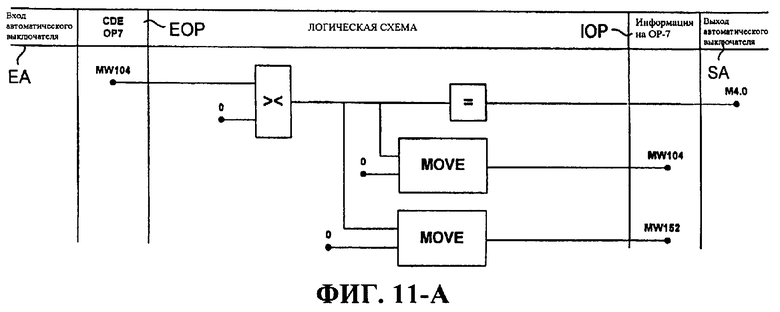
На фиг.10 представлены значения символов, используемых в логических схемах, показанных на фиг.11 - 20.
Символ 100 объединяет два входа в один выходной сигнал. Символ 108 показывает установку входного сигнала на значение 1. Символ 110 показывает установку входного сигнала на значение 0. Символы 112 и 114 обозначают логические триггерные схемы. Символы 114 и 116 показывают запуск по фронту или по спаду сигнала. Символ 120 показывает временную задержку сигнала. Символ 124 обозначает равенство между входным сигналом и выходным сигналом. Символ 126 проверяет превышение основного сигнала по отношению к некоторому значению и выдает основной сигнал в качестве выходного сигнала. Символ 128 проверяет преобладание или равенство между основным сигналом и значением и выдает основной сигнал в качестве выходного сигнала. Символ 130 проверяет преобладание значения по отношению к основному сигналу и выдает основной сигнал в качестве выходного сигнала. Символ 132 проверяет преобладание или равенство между значением и основным сигналом и выдает основной сигнал в качестве выходного сигнала. Символ 134 проверяет разность между основным сигналом и значением и выдает основной сигнал в качестве выходного сигнала. Символ 136 складывает два входных сигнала и выдает соответствующий выходной сигнал. Символ 138 перемножает два входных сигнала и выдает соответствующий выходной сигнал. Символ 142 делит два входных сигнала и выдает соответствующий выходной сигнал. Для обозначения логических схем могут также применяться буквенные условные обозначения, например, MOVE, которое обозначает команду на перемещение информации из одного запоминающего устройства в другое запоминающее устройство.
Схемы выполнены в виде различных столбцов, позволяющих наглядно представить входы ЕА автоматического выключателя, выходы SA автоматического выключателя, входные команды EOP графического интерфейса, соответствующие вводу данных оператором, выходную информацию IOP графического интерфейса, соответствующую отображению выходов логических схем автоматического выключателя, например, путем вывода данных на монитор. Входы и выходы ЕА, SA, ЕОР и IOP представлены буквенными обозначениями вместе с идентификационным номером. Такими обозначениями могут быть:
MW: целое 16-битовое слово
М: бит внутри схемы
Е: вход «Все или Ничего»
MD: двойное слово.
Как правило, для проведения испытаний оператор должен выбрать двигатель среди предложенных двигателей, ввести и подтвердить максимальный и минимальный углы рукоятки и запустить испытательный стенд.
При этом может возникнуть сбой. Автоматический выключатель содержит специальные схемы для сигналов, обнаруживающих эти сбои. Например, на фиг.13А и 13В соответственно показаны схемы обнаружения сбоев напряжения на уровне плат 1 и 2 автоматического выключателя. Сразу же при обнаружении сбоя напряжения на уровне платы 1 или, соответственно, 2 активируется вход Е0.0 или, соответственно, Е0.1. Эти логические схемы выдают сигнал на выходы М153.0 и М153.1 автоматического выключателя, предупреждающий о текущих сбоях. Другие логические схемы обеспечивают обнаружение специфичных сбоев автоматического выключателя.
Во время испытания, если обнаруживается сбой, выходы принудительно переводятся на 0, и испытание переходит в режим сбоя. На фиг.11А показано подтверждение обнаружения сбоя оператором, который вводит команду MW104. Информация о подтверждении обнаружения сбоя отображается графическим интерфейсом (MW104 и MW152), и выход М4.0 автоматического выключателя выдает разрешение и осуществляет повторный запуск испытания. Блоки MOVE являются командами на копирование данных из одного запоминающего устройства в другое запоминающее устройство, в данном случае на вывод информации на экран монитора.
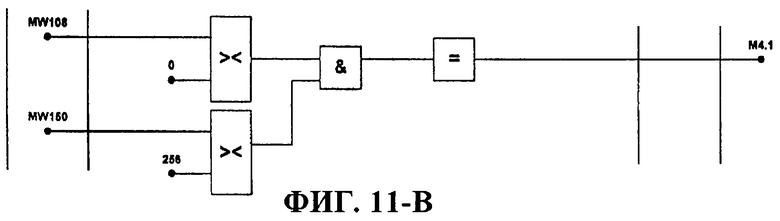
На фиг.11В показано получение минимального угла рукоятки. Оператор вводит предназначенное для исполнения значение минимального угла рукоятки от 0° до 360° (команда MW108). Это значение должно быть отличным от 0 и объединяется со средним значением MW150, которое должно быть отличным от 256, для подтверждения значения максимального угла рукоятки. Сигнал напряжения М4.1 на выходе автоматического выключателя отображает ввод минимального угла рукоятки.
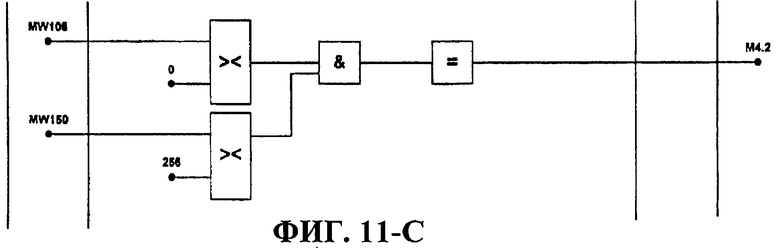
На фиг.11С показано получение максимального угла рукоятки. Оператор вводит значение максимального угла рукоятки от 0° до 360° (команда MW106). Это значение должно быть отличным от 0 и объединяется со средним значением MW150, которое должно быть отличным от 256, для подтверждения значения максимального угла рукоятки. Сигнал напряжения М4.2 на выходе автоматического выключателя отображает ввод максимального угла рукоятки.
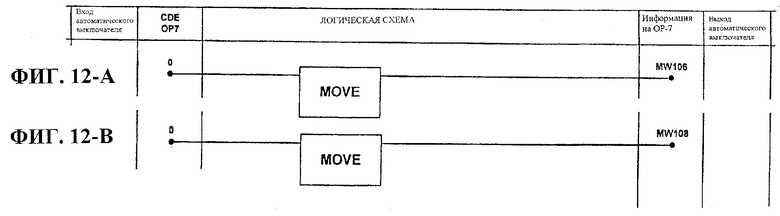
На фиг.12А и 12В показаны логические схемы, обеспечивающие вывод на графический интерфейс значения MW106 максимального угла рукоятки и значения MW108 минимального угла рукоятки после их подтверждения, как показано на фиг.11В и 11С. Значения 0 на входе блоков MOVE служат для инициализации.
Угловой ход рукоятки соответствует «закону рукоятки». Этот ход выбирает пользователь, как было описано выше.
На каждой из фиг.14А-14Е показана логическая схема, используемая для одного из пяти двигателей, который может быть выбран оператором при помощи команды MW100.
Выбор двигателя может быть осуществлен только на остановленном стенде: значение команды запуск/остановка MW102 находится на 0 в режиме остановки и может быть изменено оператором путем соответствующего ввода.
Команда MW100 может быть равна целому числу от 1 до 5 для указания выбранного оператором двигателя, при этом в примерах, представленных на фиг.14, двигатели пронумерованы от 1 до 5.
После выбора двигателя оператор может ввести минимальное и максимальное значения углового диапазона выбранного двигателя, при этом угловой диапазон находится в пределах от -360° до 360°. Такими командами являются MD170 и MD174 для двигателя 1, MD180 и MD184 для двигателя 2, MD190 и MD194 для двигателя 3, MD200 и MD204 для двигателя 4, MD210 и MD214 для двигателя 5. Угловой диапазон, связанный с выбором двигателя, называют «законом управления двигателя» или «законом двигателя».
Команда запуск/остановка переходит на 1. При этом активируется логическая схема, для которой MW100=1.
На основании значений минимального и максимального угла двигателя, выбранного в состоянии остановки, автоматический выключатель на выходе собирает значения напряжения MD158 и MD162, связанные со значениями минимального и максимального угла выбранного двигателя.
Значения напряжения MD158 и MD162, соответствующие значениям минимального и максимального угла выбранного двигателя, используются на входах автоматического выключателя (фиг.15А и 15В). Эти значения напряжения копируются в запоминающее устройство блоком MOVE, что позволяет получить значения напряжения, соответствующие фиктивным значениям минимального и максимального углов MD110 и MD114 рукоятки для выбранного двигателя. Таким образом, изменяют угловой диапазон рукоятки в зависимости от выбранного двигателя и от связанного с ним закона управления.
После запуска испытания, осуществленного после выбора двигателя и его параметров, на фиг.16 представлена функция автоматического выключателя, обеспечивающая вывод на монитор текущего заданного значения углового положения рукоятки. На входе автоматического выключателя получает:
значение PEW304, соответствующее значению напряжения, полученному от потенциометра и связанному с текущим значением угла рукоятки;
значение напряжения М4.1, соответствующее значению минимального угла рукоятки, полученному логической схемой, показанной на фиг.11В;
значение напряжения М4.2, соответствующее значению максимального угла рукоятки, полученному логической схемой, показанной на фиг.11С;
значения MD110 и MD114, соответствующие фиктивные минимальному и максимальному углам рукоятки для выбранного двигателя, полученным логическими схемами, показанными на фиг.15А и 15В.
Показанная на фиг.16 логическая схема автоматического выключателя преобразует полученное от потенциометра значение напряжения рукоятки PEW 304 в значение напряжения MD154, соответствующее текущему углу рукоятки. Это преобразование осуществляется на основании диапазона напряжения потенциометра, значений напряжения, соответствующих значениям реальных максимального и минимального углов рукоятки, значении напряжения, соответствующих фиктивным значениям минимального к максимального углов MD110 и MD114 рукоятки для выбранного двигателя.
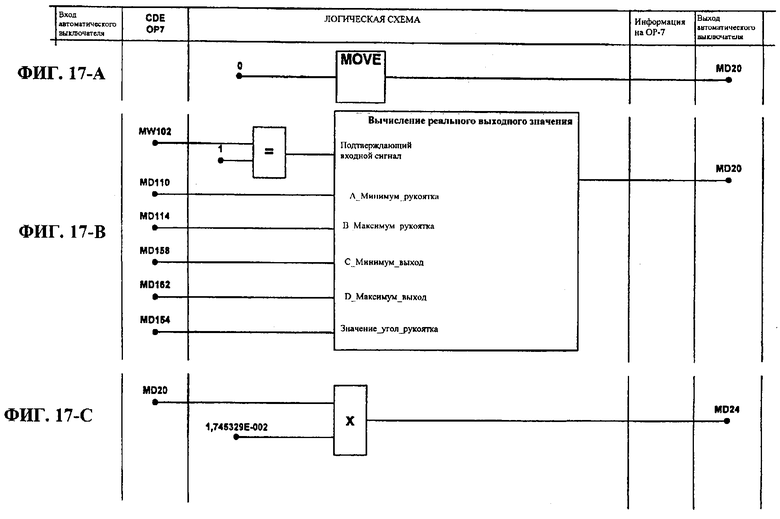
На фиг.17А-17С показаны логические схемы, обеспечивающие вычисление заданного значения угла в градусах, а затем в радианах.
Фиг.17А соответствует схеме инициализации перед вычислением нового заданного значения угла. Выход MD20 является напряжением, отображающим значение в градусах.
Как показано на фиг.17В логическая схема автоматического выключателя на выходе получает:
значение команды MW 102, которое должно быть равно 1 (обозначает состояние остановки испытания);
значения напряжения, соответствующие значениям фиктивных минимального и максимального углов MD110 и MD114 рукоятки для выбранного двигателя;
значения напряжения, соответствующие значениям минимального и максимального углов MD158 и MD162 выбранного двигателя;
значение напряжения текущего угла рукоятки MD154.
Логическая схема (фиг.17В) позволяет получить на выходе значение угла рукоятки VD20 в градусах.
Фиг.17С иллюстрирует преобразование значения MD20 в угол MD24 в радианах путем умножения на π/180.
Как было указано выше, автоматический выключатель может выдать на интерфейс-преобразователь заданное угловое значение, которое затем трансформируется в два значения синуса и косинуса.
Автоматический выключатель может также выдавать в качестве выходных значений синус и косинус заданного значения угла.
На фиг.18 показан автоматический выключатель, выдающий на выходе значения косинуса и синуса заданного угла рукоятки.
Так, на фиг.18А заданное значение угла рукоятки MD24 в радианах поступает на вход логической схемы COS, которая трансформирует это значение в значение MD30 косинуса этого угле на выходе логической схемы. На фиг.18В это значение MD30 поступает на вход логической схемы масштабирования, при этом значения 1 и -1 на входе отображают верхнюю и нижнюю границы входного сигнала. Значение М3.0 является битом подтверждения, также равным 1, который служит для подтверждения обращения к логической схеме FC106. Масштабированное значение косинуса MW36 поступает на выход автоматического выключателя, а выход MW34 указывает на состояние масштабирования косинуса.
На фиг.18С заданное значение в радианах MD24 угла рукоятки поступает на вход логической схемы SIN, которая преобразует это значение в значение MD40 синуса этого угла на выходе логической схемы. На фиг.18D это значение MD40 поступает на вход масштабирующей логической схемы, при этом значения 1 и -1 отображают верхнюю и нижнюю границы входного сигнала. Значение М3.0 является битом подтверждения, также равным 1, который служит для подтверждения обращения к логической схеме FC106. Масштабированное значение синуса MW46 поступает на выход автоматического выключателя, а выход MW44 указывает на состояние масштабирования синуса.
На фиг.19 показаны масштабирующие логические схемы для выходов угловых значений в градусах MD20 логических схем, показанных на фиг.17А и 17В.
На основании входного сигнала MD20, отображающего заданное угловое значение в градусах, логическая схема (фиг.19А) в качестве верхней и нижней границ входного сигнала получает значения напряжения, соответствующие минимальному и максимальному углам MD158 и MD162 выбранного двигателя (угловой диапазон закона двигателя). Сигнал М3.1 на входе находится на нуле. На основании этих входных данных логическая схема (фиг.19А) обеспечивает копирование заданного значения в угловом диапазоне закона двигателя для системы сбора данных ACQ, называемого выходом MW56, и простое копирование заданного значения в угловом диапазоне закона двигателя, называемого выходным значением MW54.
На основании входного сигнала MD20, отображающего заданное угловое значение в градусах, логическая схема (фиг.19В) в качестве верхней и нижней границ входного сигнала получает значения, например, 140° и 40°. Сигнал М3.1 на входе по-прежнему находится на нуле. На основании этих входных данных логическая схема (фиг.19В) обеспечивает копирование заданного значения в угловом диапазоне закона двигателя для системы сбора данных ACQ, называемого выходом MW60, и простое копирование заданного значения в угловом диапазоне закона двигателя, называемого выходом MW58.
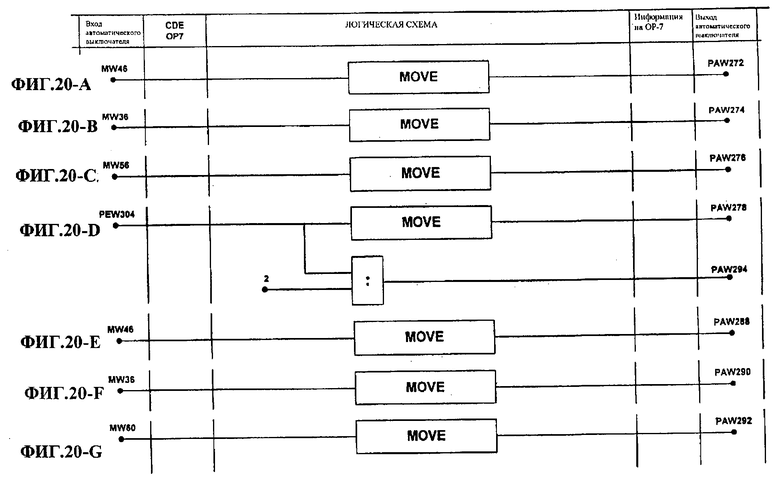
На фиг.20 показано присвоение аналоговым выходам автоматического выключателя внутренних слов автоматического выключателя. Фиг.20А, 20В и 20С является избыточными для фиг.20Е, 20F, 20G, чтобы выходы автоматического выключателя были избыточными для интерфейса-преобразователя, показанного на фиг.7.
Если автоматический выключатель на выходе выдает первый тригонометрический сигнал, то на основании входного сигнале MW46, отображающего синус заданного угла, схема (фиг.20А) выдает выходной сигнал PAW272 в качестве первого выхода синуса заданного угла на интерфейс-преобразователь. Показанная на фиг.20Е схема является избыточной для схемы, показанной на фиг.20А, и выдает выход PAW288 в качестве второго выхода синуса заданного угла на интерфейс-преобразователь.
Если автоматический выключатель на выходе выдает второй тригонометрический сигнал, то на основании входного сигнала MW36, отображающего косинус заданного угла, схема на фиг.20В выдает выходной сигнал PAW274 в качестве первого выхода косинуса заданного угла на интерфейс-преобразователь. Показанная на фиг.20F схема является избыточной для схемы на фиг.20В и выдает выход PAW220 в качестве второго выхода косинуса заданного угла на интерфейс-преобразователь.
Если на выходе автомат выдает линейный сигнал, то показанная на фиг.20С схема обеспечивает выдачу на выходе копии команды двигателя в масштабе закона двигателя для системы сбора данных ACQ на основании входного сигнала MW56 (фиг.19А), соответствующего заданному углу, переведенному в масштаб закона двигателя.
Показанная на фиг.20G логическая схема обеспечивает выдачу на выходе копии команды двигателя в масштабе [40°, 140°] для системы сбора данных ACQ на основании входного сигнала MW56 (фиг.19В), соответствующего масштабированному заданному углу.
Показанная на фиг.20D логическая схема обеспечивает выдачу на блок 41 (сервоусилитель мощности) (фиг.3) сигналов напряжения PАW278 и PAW294. Сигнал PAW278 соответствует сигналу напряжения потенциометра рукоятки PEW304, а сигнал PAW294 соответствует половине сигнала PEW304 напряжения потенциометра рукоятки.
Настоящее изобретение не ограничивается описанными выше вариантами его выполнения, приведенными исключительно в качестве примеров, и может включать в себя другие варианты, которые могут рассматриваться специалистами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления отвалом бульдозера | 1984 |
|
SU1182128A1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2000 |
|
RU2205766C2 |
| АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЕТОСИГНАЛЬНОЙ СВЯЗИ | 2016 |
|
RU2638057C2 |
| ТРЕНАЖЕР ОПЕРАТОРА ЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 2002 |
|
RU2202830C1 |
| АППАРАТ ДЛЯ ИМПУЛЬСНОЙ ТЕРАПИИ СПИННОГО И ВЕРХНЕШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2005 |
|
RU2348432C2 |
| ПУЛЬТ, СИСТЕМА И СПОСОБ РУЧНОГО УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) "АРЖЕСАН" | 1996 |
|
RU2128600C1 |
| АВТОНОМНЫЙ БЛОК ЗАЩИТЫ ДВИГАТЕЛЯ ГАЗОТУРБИННОЙ УСТАНОВКИ И СПОСОБ ЕГО РАБОТЫ | 2022 |
|
RU2776229C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЭЛЕКТРИЧЕСКИЙ ИНФОРМАЦИОННЫЙ СИГНАЛ | 2007 |
|
RU2327222C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |



Устройство предназначено для управления газами, в частности, для испытательного стенда авиационного газотурбинного двигателя. Устройство содержит блок управления, действующий на собственное управление газотурбинного двигателя (МТ1-МТ3) в зависимости от входного сигнала ручного управления, определенного органом ручного управления. Орган ручного управления выдает сигнал углового положения рукоятки (CL, 10JS). Блок управления содержит автоматический выключатель, предназначенный для преобразования сигнала углового положения рукоятки в трансформированный сигнал углового положения в соответствии с выбранным законом управления, и интерфейс для преобразования трансформированного сигнала углового положения в два синусоидальных сигнала преобразующего типа, что обеспечивает управление различными газотурбинными двигателями при помощи одного и того же устройства, в частности такими, как газотурбинные двигатели, использующие для собственного управления сигналы синусоидального типа. 10 з.п. ф-лы, 20 ил.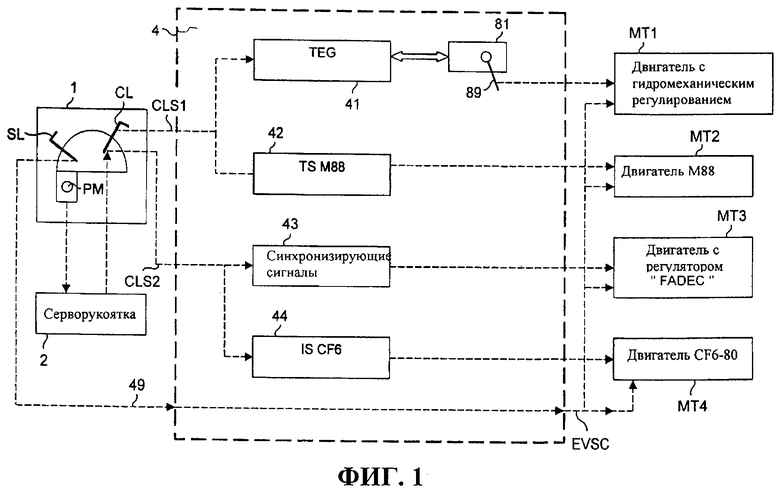
автоматический выключатель (4), обеспечивающий преобразования сигнала углового положения рукоятки в трансформированный сигнал углового положения (TRA) в соответствии с выбранным законом управления, и
по меньшей мере один интерфейс (70) для преобразования трансформированного сигнала (TRA) углового положения в два синусоидальных сигнала (COS-RES, SIN-RES) преобразующего типа, что обеспечивает управление различными газотурбинными двигателями при помощи одного и того же устройства, в частности газотурбинными двигателями, использующими для собственного управления сигналы синусоидального типа.
выбора и добавления используемого закона управления;
ввода и изменения параметров органа ручного управления.
| US 4466278 А, 21.08.1984 | |||
| СПОСОБ ПОДОГРЕВА ЗАГРУЖАЕМОГО МАТЕРИАЛА В ПЛАВИЛЬНОЙ УСТАНОВКЕ, А ТАКЖЕ ПОДОГРЕВАТЕЛЬ ЗАГРУЖАЕМОГО МАТЕРИАЛА И ПЛАВИЛЬНАЯ УСТАНОВКА | 2011 |
|
RU2576973C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ БУТЫЛКИ И БУТЫЛКА | 2014 |
|
RU2657574C2 |
| US 2866385 А, 30.12.1958 | |||
| СПОСОБ ИСПЫТАНИЯ НА НАЗЕМНОМ СТЕНДЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ЕГО УЗЛОВ | 1997 |
|
RU2135975C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВИАЦИОННЫХ ГТД | 1996 |
|
RU2118810C1 |

