Изобретение относится к области авиации, в частности к способам управления движением воздушных судов.
Известен выбранный в качестве ближайшего аналога способ управления воздушным движением, заключающийся в том, что с помощью вычислительного комплекса все воздушные суда, находящиеся в зоне управления, разделяют на три группы, в каждую из которых входят воздушные суда, требующие управления с вероятностью, равной нулю, с вероятностью, большей нуля, но меньшей единицы, и с вероятностью, равной единице соответственно в каждой группе. На экране индикатора воздушной обстановки этих трех групп и сопровождающую их информацию отображают различными цветами. Для оценки времени сближения конфликтующих воздушных судов их соединяют линиями со шкалой, единица длинны которых равна скорости сближения. Кроме того, с помощью вычислительного комплекса рассчитывают и на индикаторе воздушной обстановки отображают прогнозируемые продольные и боковые расстояния между конфликтующими воздушными судами, а также относительную высоту между ними в момент их наибольшего сближения и шкалу, которая отображает степень необходимого для предотвращения конфликта изменения продольной или вертикальной скорости (патент РФ № 2134910, кл. МПК G 08 G 7/00, опубл. 20.08.99, бюл. № 23).
Недостатками данного способа являются необходимость большого количества радиолокационных комплексов для получения информации о конфликтных ситуациях за границами действия каждого радиолокационного комплекса, неточность прогнозирования расстояний между воздушными судами, особенно по высоте, при совершении ими маневров, либо при отклонениях от курса.
Технической задачей предложенного способа является повышение безопасности управления воздушным движением.
Поставленная задача достигается тем, что в способе управления воздушным движением (УВД) путем получения информации о координатах воздушных судов (ВС) и параметрах их движения, обработки полученной информации в вычислительном комплексе (ВК) автоматизированной системы УВД (АС УВД) и вычислительной машине каждого ВС, отображения на экране индикатора воздушной обстановки информации о движении ВС и об угрозе столкновения ВС, с помощью вычислительного комплекса рассчитывают тенденцию изменения параметров полета между каждым ВС и всеми другими ВС, находящимися в зоне УВД, и на основании полученных данных все ВС, находящиеся в зоне УВД, разделяют на три группы, причем в первую группу входят ВС, требующие управления с вероятностью, равной нулю, во вторую группу входят ВС, требующие управления с вероятностью, большей нуля, но меньшей единицы, а в третью группу входят ВС, требующие управления с вероятностью, равной единице, на экране индикатора воздушной обстановки ВС этих трех групп и сопровождающую их информацию отображают различными цветами, причем ВС второй и третьей групп дополнительно соединяют линиями со шкалой, единица длины которой равна скорости сближения с другими ВС или препятствиями, кроме того, для ВС второй и третьей групп с помощью ВК АС УВД рассчитывают прогнозируемые продольные, боковые и высотные расстояния в момент их наибольшего сближения с другими ВС или препятствиями, на экране индикатора воздушной обстановки отображают данные расстояния отрезками, снабжая их формуляром сопровождения, на котором отображают информацию о параметрах конфликтной ситуации, при этом отрезок продольного или бокового расстояния в момент наибольшего сближения ВС с другими ВС или препятствиями снабжают шкалой, единица длины которой равна расстоянию, на которое изменится прогнозируемое расстояние при изменении продольной или вертикальной скорости движения ВС на определенную величину, в нем, информацию о координатах ВС в определенный момент времени и параметрах их движения определяют при помощи спутниковой навигационной системы и/или по данным навигационных систем ВС при расстоянии между ВС не более 250 километров, затем передают на ВК, после разделения на три группы всех ВС в ВК определение координат и параметров движения для ВС, относящихся к третьей группе, производят с периодичностью не менее двух секунд, для ВС, относящихся ко второй группе, производят с периодичностью в два раза большей, чем для ВС, относящихся к третьей группе, а для ВС, относящихся к первой группе, производят с периодичностью в четыре раза большей, чем для ВС, относящихся к третьей группе. Кроме того, при сближении двух судов третьей группы одному из судов присваивается локальная система координат (ЛСК), относительно которой вычисляется расстояние до других ВС, при этом на экране индикатора воздушной обстановки ВС отображается сплайн движения одного ВС относительно других, градуированного шкалой с расстоянием сближения данных судов.
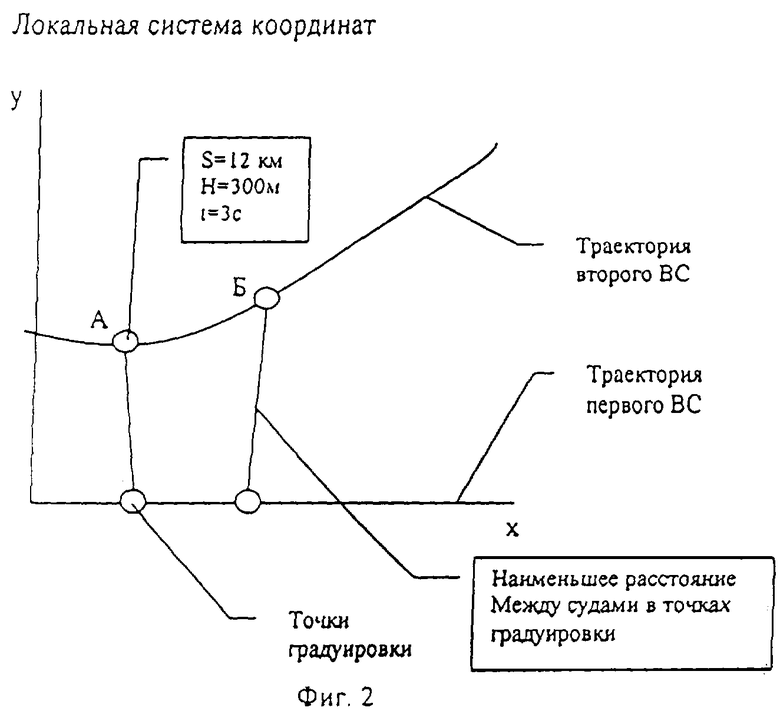
Предложенный способ поясняется чертежами, где на фиг.1 показана структурная схема АС УВД, на фиг.2 показан сплайн движения ВС с градуировкой по времени, на фиг.3 показан принцип градуировки сплайна.
На фиг.1 приняты следующие обозначения: комплекс отображения информации и оперативного управления 1, включающий индикаторы воздушной обстановки; спутниковая навигационная система 2, включающая приемники и передатчики информации и вычислительные комплексы; ВС 3 с размещенными на них приемниками и передатчиками информации, а также вычислительными машинами; вычислительный комплекс (ВК) 4, включающий приемник и передатчик сигналов, электронно-вычислительные машины (ЭВМ) для обработки планов полетов и поступающей от передатчиков спутниковой навигационной системы информации; комплекс связи и передачи данных 5, включающий средства связи (например, радиосвязь, спутниковую связь или Интернет), средства передачи плановой информации, средства связи с ЭВМ; ретранслятор 6.
Способ реализуется следующим образом. Сигналы спутниковой навигационной системы 2, излучаемые в УКВ-диапазоне, попадают на приемники информации, размещенные на ВС 3, подключенные к вычислительным машинам. Вычислительные машины, размещенные на ВС 3, на основании данных спутниковой навигационной системы 2 и бортовых навигационных систем (например, радиовысотомера, баровысотомера, измерителя скорости и др.), рассчитывают географические координаты ВС 3 в реальном времени и передают команду передатчикам информации на излучение кодированных сигналов в УКВ-диапазоне. Кодированные сигналы содержат информацию о бортовом номере и географических координатах ВС 3. Приемники информации, размещенные на других ВС 3 получают сигналы от передатчиков информации, размещенных на ВС 3, и передают их на вычислительные комплексы, в которых вычислительные машины производят их обработку, при этом на мониторах вычислительных машин каждого ВС 3 отображается воздушная обстановка в реальном режиме времени. Одновременно информация о положении каждого ВС 3 передается на ВК 4 при помощи комплекса связи и передачи данных 5, где она также подвергается обработке, в результате чего определяется группа, к которой относится каждое ВС 3. Информация о положении каждого ВС 3 может передаваться на ВК 4 и обратно через ретрансляторы 6, размещенные стационарно на земле либо в воздушном пространстве (например, на самолетах, на спутниках и др. летательных аппаратах). Затем из ВК 4 информация поступает на индикаторы воздушной обстановки комплекса отображения информации и оперативного управления 1. Комплекс связи и передачи данных 5 обеспечивает обмен информацией между наземными комплексами АС УВД, а также ВС 3 и с другими потребителями информации.
Далее приводится алгоритм определения группы, к которой относится каждое ВС. Алгоритм заключается в том, что одному из ВС (первому) присваивается декартова локальная система координат (ЛСК), независимая от глобальной системы координат (СК) индикатора ВД. Для второго судна в моменты времени t1, t2, t3 вычисляются координаты в ЛСК продольного и поперечного расстояния x1(t1), x2(t2), x3(t3), y1(t1), y2(t2), y3(t3). По данным координатам, по трем точкам и по временным показателям программными методами строится экстраполирующий сплайн, для этого находят коэффициенты а, b, с экстраполирующего полинома второго порядка

Поиск аппроксимирующей функции g(x), которая в нашем случае будет отображать траекторию движения ВС, производим по методу наименьших квадратов для сглаживания имеющихся погрешностей. В общем виде задача метода наименьших квадратов сводиться к определению таких значений коэффициентов Ck, которые минимизируют функцию

g(x)=C0+C1·x+C2·x2
S(C0,C1,C2)=




По найденным коэффициентам через уравнение второго порядка Ck строится сплайн на экране индикатора ВД, который определяет возможное движение ВС, как показано на фиг.2. По этому сплайну определяется критическое расстояние между двумя судами, которое в данном случае будет равно наименьшему расстоянию между центром ЛСК и сплайном, определяющим положение второго судна в ЛСК.
Движение первого ВС, с которым связана ЛСК, направляется по положительному направлению оси абсцисс ЛСК, при этом оба ВС снабжаются формуляром сопровождения по времени, который представляет собой градуировку шкалы абсцисс для первого ВС, и градуировку сплайна для второго судна. После градуировки на основании геометрического построения сплайна вычисляется кратчайшее расстояние между двумя ВС.
Принцип градуировки сплайна по временной шкале для второго судна:
По имеющимся данным по скорости, а также по требуемому времени градуировки в ЛСК вычисляется расстояние по шкале абсцисс, которое будет соответствовать расстоянию прохождения второго судна по имеющемуся сплайну. Для этого вычисляется цена деления градуировки по расстоянию: S = V/t, где V - скорость судна в момент составления прогноза, a t - время градуировки. Затем данное расстояние пересчитывается на ось абсцисс для градуировки сплайна в ЛСК

где S - цена деления градуировки по расстоянию, а - начальная точка по оси абсцисс для нулевого времени градуировки, b - конечная, искомая, точка конца отрезка градуировки на оси абсцисс ЛСК.
После чего находится наименьшее расстояние.
По определенным прогнозируемым значениям координат в точках градуировки определяются наименьшие значения расстояний между ВС

где x1, x2 - соответственно координаты по шкале абсцисс, в точках градуировки первого и второго ВС; y1, y2 - соответственно координаты по шкале ординат в точках градуировки первого и второго ВС, как показано на фиг.3.
По данному расстоянию и относительной высоте между ВС, определяемой по формуле Hoт=H1-H2, где H1 и Н2 - высоты полетов ВС, определяют группу, к которой относятся данные ВС, и соответственно определяют вероятность управления.
Далее приводится пример разделения всех ВС на группы. К третьей группе относятся ВС, расстояние между которыми на одной высоте полета составляет не более 5 км, а на разных высотах полета относительная высота составляет: на высотах полета от 900 м до 8100 м не более 300 м, от 8100 м до 12100 м не более 500 м, свыше 12100 м не более 1000 м. Ко второй группе относятся ВС, расстояние между которыми на одной высоте полета составляет от 5 км до 10 км, а на разных высотах полета относительная высота составляет: на высотах полета от 900 м до 8100 м - от 300 м до 600 м, от 8100 м до 12100 м - от 500 м до 1000 м, свыше 12100 м - от 1000 м до 2000 м. К первой группе относятся ВС, расстояние между которыми на одной высоте полета составляет от 10 км, а на разных высотах полета относительная высота составляет: на высотах полета от 900 м до 8100 м - от 600 м, от 8100 м до 12100 м - от 1000 м, свыше 12100 м - от 2000 м.
Далее прогнозируемая точка положения ВС в эшелоне снабжается формуляром сопровождения, как показано на фиг.2, где указывается прогнозируемое продольное расстояние между двумя ВС, относительная высота между ними и время, за которое ВС переместится из точки “А” в точку “Б”.
Затем на ВК 4 для ВС, 3 относящихся к третьей группе, производят определение координат и параметров движения, по вышеприведенным алгоритмам, с периодичностью от нуля секунд до двух секунд, для ВС, относящихся ко второй группе, производят тоже определение с периодичностью в два раза большей, чем для ВС, относящихся к третьей группе, а для ВС, относящихся к первой группе, производят определение с периодичностью в четыре раза большей, чем для ВС, относящихся к третьей группе.
На ВК производится обработка и отображение всей полетной информации зоны УВД, а на ВС производится обработка и отображение полетной информации в радиусе до 250 км для каждого ВС. При возникновении опасности столкновения ВС, с ВК на конфликтующие ВС передается команда по устранению конфликтной ситуации, аналогичная команда по устранению конфликтной ситуации вырабатывается и выдается на каждом из конфликтующих ВС. В случае отсутствия команд комплекса отображения информации и оперативного управления при возникновении конфликтной ситуации экипажи каждого ВС самостоятельно устраняют возникшую ситуацию. В случае неадекватного реагирования или отсутствия каких-либо действий экипажа на возникшую ситуацию бортовые активные системы безопасности полетов (например, БАСБП ИКСЛ-2) уводят ВС на безопасные маршруты следования в соответствии с согласованным ВК и конфликтующими между собой ВС алгоритмом.
Использование заявляемого изобретения позволяет значительно повысить безопасность полетов и пропускную способность, и область действия УВД, а также более безопасное маневрирование ВС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство предотвращения опасного сближения воздушных судов с использованием параллельного смещения | 2022 |
|
RU2785811C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2004 |
|
RU2280265C2 |
| Способ предупреждения столкновений воздушных судов при полетах в зонах пониженной плотности воздушного движения и отсутствии диспетчерской поддержки | 2016 |
|
RU2609152C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ КООРДИНАТНОЙ ИНФОРМАЦИИ ГНСС В ЦЕЛЯХ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2013 |
|
RU2601617C2 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| СПОСОБ МОНИТОРИНГА ВЫДЕРЖИВАНИЯ ВЫСОТЫ ЭШЕЛОНА ПОЛЕТА | 2008 |
|
RU2390793C1 |
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |

Изобретение относится к области авиации, в частности к способам управления движением воздушных судов. Технический результат заключается в повышении безопасности полетов. Способ управления воздушным движением (УВД) заключается в получении информации о координатах воздушных судов (ВС) и параметрах их движения, обработке полученной информации в вычислительном комплексе (ВК) автоматизированной системы УВД (АС УВД) и вычислительной машине каждого ВС, отображении на экране индикатора воздушной обстановки информации о движении ВС и об угрозе столкновения ВС, причем с помощью вычислительного комплекса рассчитывают тенденцию изменения параметров полета между каждым ВС и всеми другими ВС, находящимися в зоне УВД, и на основании полученных данных все ВС, находящиеся в зоне УВД, разделяют на три группы, определение координат и параметров движения ВС в каждой группе производят с разной периодичностью. 1 з.п. ф-лы, 3 ил.

| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 1998 |
|
RU2134910C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2002 |
|
RU2232316C2 |
| УСТРОЙСТВО ДЛЯ ВЫБОРКИ ОРУДИЙ ЛОВА | 0 |
|
SU283723A1 |
| АНОДИНА Т.Г | |||
| и др | |||
| Автоматизация управления воздушным движением | |||
| – М.: Транспорт, 1992, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |

