Изобретение относится к измерительной системе согласно ограничительной части п.1 формулы изобретения, а также к способу повышения точности выполняемых такой системой измерений согласно п.14 формулы изобретения.
Измерительные системы с одним или несколькими датчиками, а также взаимодействующим с ними блоком обработки результатов измерений широко используются в самых разнообразных областях. Принципиальное устройство подобных измерительных систем в последующем описании для наглядности более подробно поясняется на примере массового расходомера воздуха, известного по его применению в автомобильной техники. Однако область применения настоящего изобретения не ограничена подобными массовыми расходомерами воздуха.
Для возможности измерения расхода потока текучей среды, например воздуха, системы впрыскивания топлива, которыми оборудуются двигатели, оснащаются устройством измерения массового расхода воздуха, которое в литературе называется также массовым расходомером воздуха. У таких известных массовых расходомеров их измерительный преобразователь подвергается воздействию набегающего на него потока воздуха, проходящего по впускному трубопроводу двигателя внутреннего сгорания (ДВС). Измерительный преобразователь имеет нагреваемый элемент (обычно нагреваемую нить или проволоку), а также измерительные резисторы, охлаждаемые обтекающим их потоком воздуха за счет конвективного теплообмена, что сопровождается изменением сопротивления измерительных резисторов. Расход проходящего по впускному трубопроводу потока воздуха можно определить на основе величины расстройки измерительного моста. Выдаваемый в результате измерительным преобразователем измерительный сигнал передается в удаленный блок обработки результатов измерений.
Для передачи измерительного сигнала у массового расходомера воздуха имеется далее (цифровой) интерфейс. В блоке обработки результатов измерений из поступившего в него сигнала извлекается и обрабатывается полезная информация.
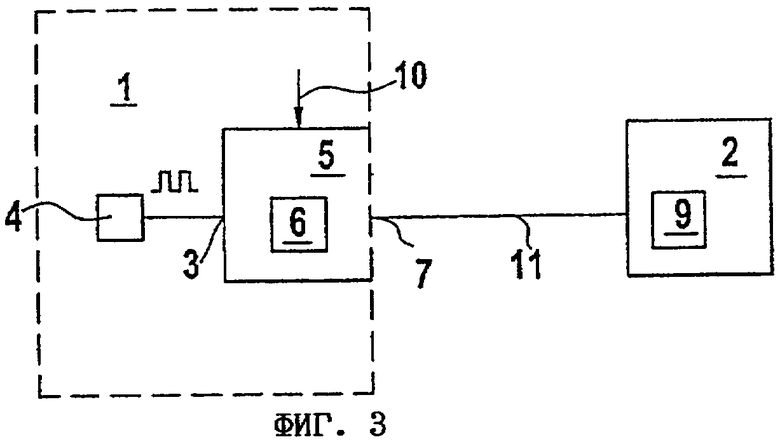
Типичный пример подобной измерительной системы с цифровым интерфейсом схематично изображен на фиг.3. В состав показанной на этом чертеже измерительной системы входит измерительное устройство 1 с интерфейсом 5 для передачи цифровых сигналов в блок 2 обработки результатов измерений. Измерительное устройство 1 и блок 2 обработки результатов измерений соединены между собой кабельной линией 11.
Интерфейс 5 выполнен в основном на базе цифровой схемотехники и имеет тактовый вход 3, на который подаются тактовые импульсы с определенной частотой (например, 10 МГц), и сигнальный вход 10, на который поступает выдаваемый измерительным преобразователем измерительный сигнал.
Интерфейс 5 имеет далее вычислительное устройство 6, обрабатывающее измерительный сигнал и выдающее соответствующий сигнал на сигнальный выход 7 интерфейса 5.
Такой выходной сигнал обычно представляет собой сигнал, формируемый на основе внутреннего (системного) тактового сигнала и измерительного сигнала. В соответствии с этим между тактовым и выходным сигналами обычно существует линейная зависимость.
Для передачи полезной информации (измеренного значения) в принципе могут использоваться все известные методы передачи информации, например метод модуляции. Однако полезную информацию для ее передачи можно также кодировать или представлять скважностью импульсов или частотой, соответственно длительностью периода выходного сигнала.
В известных системах полезный сигнал обычно представлен или закодирован длительностью периода выходного сигнала, поскольку такое кодирование, с одной стороны, сравнительно просто реализовать на практике, а с другой стороны, обеспечивает исключительно высокую точность измерений.
Поступающий на тактовый вход 3 внутренний тактовый сигнал генерируется тактовым генератором 4, в качестве которого может использоваться, например, осциллятор или кварцевый генератор. Подобные осцилляторы, соответственно, кварцевые генераторы могут характеризоваться значительными отклонениями их параметров от номинальных, соответственно не обеспечивают генерирование тактовых импульсов со стабильной частотой, которая может колебаться в широких пределах. Отклонение же внутренней тактовой частоты от номинальной прямо пропорционально сказывается на выходном сигнале и поэтому может существенно снизить точность измерений.
Измерительные системы главным образом при их использовании для измерения величин, изменяющихся в широком диапазоне, могут удовлетворять заданным требованиям, предъявляемым к допустимой погрешности измерений, только при условии применения в них высокоточных кварцевых генераторов, соответственно осцилляторов. Однако стоимость прецизионных кварцевых генераторов соответственно настолько высока, что их применение в подобного рода измерительных системах становится просто нецелесообразным с экономической точки зрения.
Исходя из вышеизложенного в основу настоящего изобретения была положена задача разработать измерительную систему, которая при применении в ней недорогих кварцевых генераторов, соответственно осцилляторов, обеспечивала бы возможность измерения величин с малой допустимой погрешностью.
Указанная задача решается с помощью измерительного устройства, представленного в п.1 формулы изобретения, а также с помощью способа, представленного в п.14 формулы изобретения. Различные варианты осуществления изобретения приведены в соответствующих зависимых пунктах формулы.
Лежащая в основе изобретения идея состоит в том, чтобы на основе внутреннего тактового сигнала формировать дополнительный опорный сигнал, передаваемый в блок обработки результатов измерений. Этот опорный сигнал используется для вычисления поправочного коэффициента, отражающего величину отклонения тактовой частоты от заданной тактовой частоты, а тем самым и величину отклонения частоты, соответственно длительности периода измерительного выходного сигнала от значений этих параметров, которые выходной сигнал имел бы в отсутствие подобного отклонения. Этот поправочный коэффициент учитывается при обработке выходного сигнала, т.е. для коррекции выходного сигнала используется содержащаяся в опорном сигнале информация об отклонении тактовой частоты от номинальной.
Частота опорного сигнала, соответственно, длительность его периода предпочтительно в N раз меньше частоты, соответственно, длительности периода тактового сигнала и составляет прежде всего менее 100 Гц, преимущественно менее 50 Гц, предпочтительно около 20 Гц. Частота же тактового сигнала гораздо выше и составляет, например, 10 МГц.
Согласно одному из предпочтительных вариантов осуществления изобретения интерфейс измерительного преобразователя имеет сигнальный выход, выдаваемый на который сигнал имеет изменяемую частоту, т.е. период выдаваемого на который выходного сигнала имеет в зависимости от измерительного сигнала различную длительность.
В соответствии со следующим предпочтительным вариантом осуществления изобретения блок обработки результатов измерений имеет вычислительное устройство, предназначенное прежде всего для вычисления определяемого на основе опорного сигнала поправочного коэффициента с целью коррекции выходного сигнала.
Предлагаемая в изобретении измерительная система может использоваться, например, в автомобильной технике для оптимизации впрыскивания топлива. В этом случае в состав такой измерительной системы входили бы массовый расходомер воздуха и взаимодействующий с ним блок обработки результатов измерений.
Для компенсации обусловленного изменениями температуры дрейфа характеристики измерительного преобразователя массовый расходомер воздуха предпочтительно имеет датчик температуры, измеренные которым значения температуры также передаются в блок обработки результатов измерений.
Измеренные соответствующим датчиком значения температуры предпочтительно передавать в блок обработки результатов измерений вместе с опорным сигналом. В соответствии с предпочтительным вариантом осуществления изобретения измеренные значения температуры представлены или закодированы скважностью импульсов опорного сигнала. Однако для передачи измеренных значений температуры в блок обработки результатов измерений могут использоваться и иные пути или способы.
Согласно еще одному предпочтительному варианту осуществления изобретения длительность периода выходного сигнала соответствует шагу его квантования, составляющему ≤500 нс, предпочтительно ≤200 нс. Частота выходного сигнала предпочтительно составляет от 1,5 до 12 кГц.
Передача измеренных значений происходит прежде всего с использованием стандартных характеристик, т.е. измеренные значения предпочтительно приведены к нормированному виду и благодаря этому не зависят от конкретных размеров места измерений, например впускного трубопровода двигателя.
Характеристика измерительного устройства представляет собой, например, полином n-й и прежде всего третьей степени.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - принципиальная схема измерительной системы с цифровым интерфейсом в соответствии с одним из вариантов осуществления изобретения;
на фиг.2 - схема соединений интерфейса измерительного преобразователя и блока обработки результатов измерений;
на фиг.3 - принципиальная схема известной измерительной системы с цифровым интерфейсом.
На фиг.1 показана измерительная система, состоящая из измерительного устройства 1 и блока 2 обработки результатов измерений, которые соединены между собой кабельной линией 11.
Измерительное устройство 1 имеет интерфейс 5 для передачи цифровых сигналов в блок 2, а также тактовый вход 3 и сигнальный вход 10.
На тактовый вход 3 подается тактовый сигнал, который формируется тактовым генератором 4, например кварцевым генератором или осциллятором, и частота которого составляет примерно 10 МГц и в зависимости от качественных параметров тактового генератора может на сравнительно большую величину отклоняться от номинальной, соответственно колебаться в сравнительно широких пределах.
Измерительное устройство 1, работа которого основана по существу на цифровой обработке сигналов, выдает в интерфейс 5 цифровой измерительный сигнал. Имеющееся в интерфейсе 5 вычислительное устройство обрабатывает поступающие в него тактовый и измерительный сигналы и вычисляет на их основе выходной сигнал, частота, соответственно, длительность периода которого зависит от измерительного сигнала. Выходной сигнал, таким образом, представляет собой сигнал с переменной длительностью периода, сформированный на основе внутреннего тактового сигнала и измерительного сигнала. Между длительностью периода тактового сигнала и длительностью периода выходного сигнала существует прежде всего линейная зависимость.
Полезная информация, т.е. измеренное значение, содержащаяся в выходном сигнале в закодированном длительностью его периода, соответственно его частотой виде, проявляет те же отклонения, что и тактовый сигнал.
Для компенсации этих отклонений на основе тактового сигнала формируют опорный сигнал. Этот опорный сигнал, который имеет сравнительно низкую частоту, равную примерно 20 Гц, с соответствующего сигнального выхода 13 интерфейса 5 передается в блок 2 обработки результатов измерений.
Величина отклонения длительности периода опорного сигнала учитывается при обработке измерительного сигнала. С этой целью имеющееся в блоке 2 обработки результатов измерений вычислительное устройство 9 вычисляет поправочный коэффициент k по следующей формуле:
где через Тзадан обозначено значение, соответствующее требуемой длительности периода, а через Тфакт обозначено фактически измеренное значение длительности периода опорного сигнала. В соответствии с этим происходит, таким образом, логометрическое измерение.
В завершение вычислительное устройство 9 определяет с учетом поправочного коэффициента собственно измеренное значение, например массовый расход проходящего по каналу потока воздуха. Используемая в рассматриваемом примере характеристика представляет собой полином третьей степени, с помощью которого рассчитывается массовый расход воздуха в процентах от максимального расхода mmax:
где а представляет собой абсолютную составляющую стандартной характеристики; b представляет собой линейную составляющую стандартной характеристики; Т0 обозначает смещение характеристики; Тнорм обозначает диапазон характеристики, а Тк обозначает скорректированную длительность периода. При этом скорректированная длительность периода Тк рассчитывается по следующей формуле:
Тк=k×TM,
где Тм обозначает измеренную длительность периода.
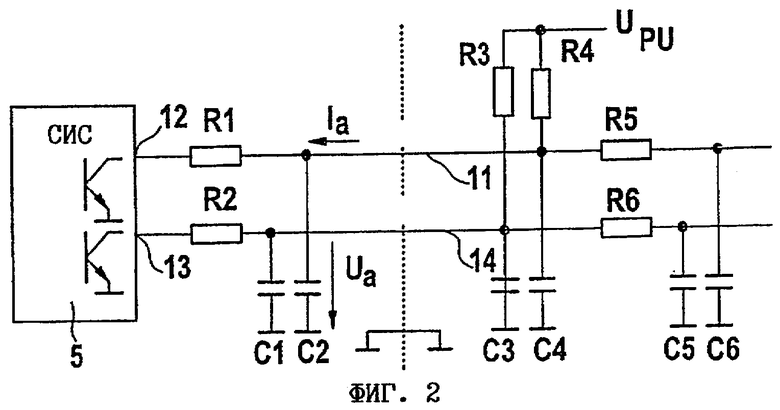
На фиг.2 более детально показана схема соединения интерфейса 5 и блока 2 обработки результатов измерений (блока управления двигателем). Цифровой интерфейс 5 имеет тактовый вход 3 и сигнальный вход 10. Интерфейс 5 выполнен в виде специализированной интегральной схемы (СИС) и имеет сигнальный выход 12, на который подается первый измерительный сигнал (пропорциональный расходу воздуха), и сигнальный выход 13, на который подаются опорный сигнал и второй измерительный сигнал (пропорциональный температуре).
К обоим сигнальным выходам 12, 13 подключено по резистору R1, R2 и по соединенному с корпусом ("массой") конденсатору C1, C2. Конденсаторы C1, C2 служат при этом для отвода высокочастотных паразитных составляющих, что необходимо прежде всего для соблюдения требований по обеспечению электромагнитной совместимости (ЭМС).
Измерительный сигнал, пропорциональный массовому расходу воздуха, поступает в блок управления двигателем по линии 11, а измерительный сигнал, пропорциональный температуре, - по линии 14.
Содержащаяся в этих переданных в блок управления сигналах информация обрабатывается на основе нормированных стандартных характеристик, благодаря чему блок управления двигателем путем выполнения определенных вычислительных операций может определить физические значения массового расхода воздуха и температуры.
Блок управления двигателем имеет также "утягивающую вверх" схему для создания высокого уровня напряжения. Такая "утягивающая вверх" схема имеет резисторы R3, соответственно R4, каждый из которых одним их выводом соединен с соответствующей линией 11, 14 передачи сигналов, а другим их выводом подключен к напряжению питания UPU.
Для подавления помех в линиях 11, 14 в свою очередь предусмотрены соединенные с корпусом конденсаторы С3, С4.
Помимо этого блок управления двигателем имеет по одному на каждую линию 11, 14 RC-фильтру нижних частот для защиты дополнительно подключенного к схеме контроллера (не показан). Эти RC-фильтры нижних частот содержат резисторы R5, R6 и конденсаторы С5, С6.
Фронты тактового сигнала измерительного устройства ограничены по времени нарастания и времени среза, при этом время нарастания определяется в первую очередь "утягивающей вверх" схемой в блоке управления двигателем.
Выходной каскад измерительного устройства защищен от влияния обычных внешних факторов, таких как электростатический разряд, электромагнитное излучение, импульсные помехи и иные помехи, и должен также выдерживать скачки напряжения и тока, например короткие замыкания, обусловленные несоблюдением полярности подключения его контактов в результате, например, неправильного обращения с устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальный счетчик электрической энергии | 2021 |
|
RU2786977C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ В КОРИОЛИСОВОМ МАССОВОМ РАСХОДОМЕРЕ | 1997 |
|
RU2182696C2 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
| ЭЛЕКТРОННОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ОПРЕДЕЛЕНИЯ РАЗНОСТИ ФАЗ МЕЖДУ ПЕРВЫМ СИГНАЛОМ ДАТЧИКА И ВТОРЫМ СИГНАЛОМ ДАТЧИКА РАСХОДОМЕРА | 2006 |
|
RU2373499C1 |
| ИЗМЕРИТЕЛЬНАЯ ЭЛЕКТРОНИКА И СПОСОБЫ ДЛЯ ГЕНЕРИРОВАНИЯ СИГНАЛА ВОЗБУЖДЕНИЯ ДЛЯ ВИБРАЦИОННОГО РАСХОДОМЕРА | 2006 |
|
RU2376556C1 |
| КОРИОЛИСОВ МАССОВЫЙ РАСХОДОМЕР И СПОСОБ ПОЛУЧЕНИЯ ПЕРВОГО ИЗМЕРЕННОГО ЗНАЧЕНИЯ | 2004 |
|
RU2348012C2 |
| БЫТОВОЙ УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР-СЧЕТЧИК ГАЗА | 1999 |
|
RU2178148C2 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ | 2003 |
|
RU2320964C2 |
| ИЗМЕРИТЕЛЬНОЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО И СПОСОБЫ БЫСТРОГО ОПРЕДЕЛЕНИЯ МАССОВОЙ ДОЛИ КОМПОНЕНТОВ МНОГОФАЗНОГО ФЛЮИДА ПО СИГНАЛУ РАСХОДОМЕРА КОРИОЛИСА | 2006 |
|
RU2376555C2 |
| УЛЬТРАЗВУКОВОЙ ГАЗОВЫЙ РАСХОДОМЕР-СЧЕТЧИК | 1999 |
|
RU2165598C1 |
Изобретение относится к измерительной технике и может быть использовано в измерительных устройствах с цифровым интерфейсом. Технический результат - повышение точности измерений. Для достижения данного результата для передачи цифровых сигналов в блок обработки результатов измерений подается внутренний тактовый сигнал. При этом на сигнальный вход подается измерительный сигнал, а вычислительное устройство на основе тактового сигнала и измерительного сигнала формирует выходной сигнал. Кроме этого, для повышения точности измерений предлагается передавать в блок обработки результатов измерений опорный сигнал, формируемый на основе тактового сигнала, и использовать этот опорный сигнал для коррекции выходного сигнала. 3 н. и 10 з.п. ф-лы, 3 ил.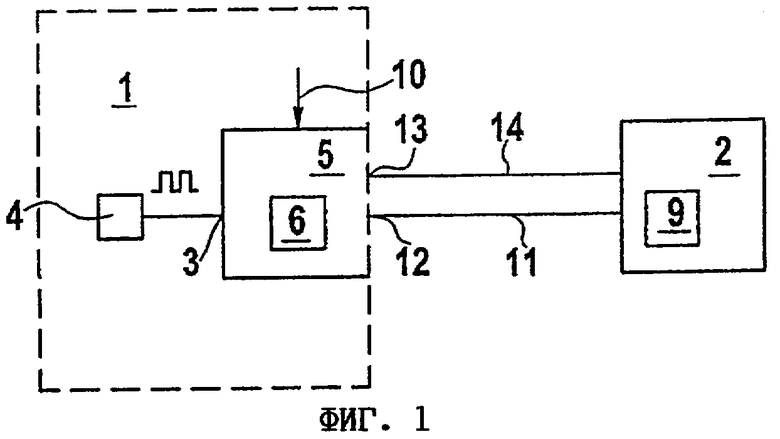
| СПОСОБ ОЦЕНИВАНИЯ НЕСУЩЕЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100812C1 |
| DE 19536199 A1, 03.04.1997 | |||
| ЭЛЕКТРОМАГНИТНЫЙ ЛОГОМЕТРИЧЕСКИЙ ЧАСТОТОМЕР | 0 |
|
SU239441A1 |
| Устройство определения частоты сигналов | 1987 |
|
SU1478143A1 |
| Шило | |||
| Популярные цифровые микросхемы | |||
| Справочник | |||
| М.: Радио и связь, 1988, с.188 | |||
| В.Н.Вениаминов, О.Н.Лебедев, А.И.Мирошниченко | |||
| Микросхемы и их применение | |||
| Справочное пособие, 3-е изд | |||
| перераб | |||
| и дополн | |||
| М.: Радио и связь | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |

