Изобретение относится к способам контроля положения точек кузова транспортного средства и может использоваться в машиностроительной промышленности, авторемонтном производстве и в автосервисах - для контроля геометрии кузовов после и в процессе правки.
Известен способ измерения, реализованный в установке для контроля положения точек кузова транспортного средства (см. а.с. №1706742 СССР, М.кл. В 21 D 1/12, опубл. 23.01.92 г.). Способ предусматривает измерение положения точек с помощью измерительных элементов, выполненных в виде датчиков поворота, рамок, ролика и нерастяжимой нити, один конец которой закреплен на ролике, а другой оснащен узлом крепления к контролируемой точке кузова, аналого-цифрового преобразователя, ЭВМ и устройства представления информации. Измерительный элемент позволяет определять координаты точки в сферической системе координат - по углам между проекциями радиус-вектора (нити) на координатные плоскости и длине радиус-вектора.
Недостатками способа являются необходимость и сложность крепления нити на кузове в установленном месте (в контрольной точке), что увеличивает продолжительность и снижает точность измерений, необходимость большого количества (не менее трех) точек, а следовательно и измерительных элементов, что увеличивает стоимость установки, необходимость измерения длины нити другой линейной мерой.
Известен способ контроля положения точек кузова транспортного средства при правке с использованием излучателей лазерного типа (Патент RU №2239505, МКл. B 21 D 1/12, опубл. 10.11.2004 г. Бюл. №31), при котором задают расстояние между двумя измерительными элементами, в качестве которых используют излучатели лазерного типа, установленные на матрице и соединенные с датчиками угла поворота в двух плоскостях, наводят оба луча на одну точку кузова, мысленно проецируют ее на матрицу и строят пирамиду, определяют угол между одним из лучей и его проекцией на матрицу и углы между проекциями на самой матрице и определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат, потом наводят оба луча на вторую точку кузова и определяют пространственные координаты второй точки кузова аналогично первой точке и определяют расстояние между двумя точками по трем координатам, которое сравнивают с эталонным размером.
Недостатком способа является необходимость применения четырех датчиков для измерения углов поворота, в результате чего может накапливаться погрешность измерения координат контролируемых точек кузова.
Задачей изобретения является повышение точности измерений положения точек кузова.
Поставленная задача решается тем, что в способе измерения положения точек кузова транспортного средства при правке, включающем измерение пространственных координат точек с помощью измерительных элементов, при котором наводят лучи на контролируемые точки кузова автомобиля, согласно изобретению, используют три лазерных дальномера, которым задают пространственные координаты, наводят три луча на одну точку кузова, замеряют длину лучей и определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат путем решения системы уравнений:
x(x2-x1)+y(y2-y1)+z(z2-z1)=(c1-b1)/2;
x(x3-x2)+y(y3-y2)+z(z3-z2)=(c2-b2)/2;
x(x3-x1)+y(y3-y1)+z(z3-z1)=(c3-b3)/2,
где (x1 y1,z1) - координаты первого дальномера;
(x2, y2, z2) - координаты второго дальномера;
(х3, y3, z3) - координаты третьего дальномера;
(x, y, z) - координаты искомой (контролируемой) точки кузова;
c1=a1 2-а2 2;
c2=а2 2-а3 2;
c3=a1 2-a3 2,
где a1 - длина луча от первого дальномера до контролируемой точки;
а2 - длина луча от второго дальномера до контролируемой точки;
а3 - длина луча от третьего дальномера до контролируемой точки;
b1=х1 2-х2 2+y1 2-y2 2+z1 2-z2 2;
b2=x2 2-x3 2+y2 2-y2 3+z2 2-z3 2;
b3=x1 2-x3 2+y1 2-y2 3+z1 2-z3 2.
Потом наводят три луча на следующую точку кузова и определяют ее пространственные координаты аналогично первой точке и определяют расстояние между двумя точками по полученным координатам, которое сравнивают с эталонным размером.
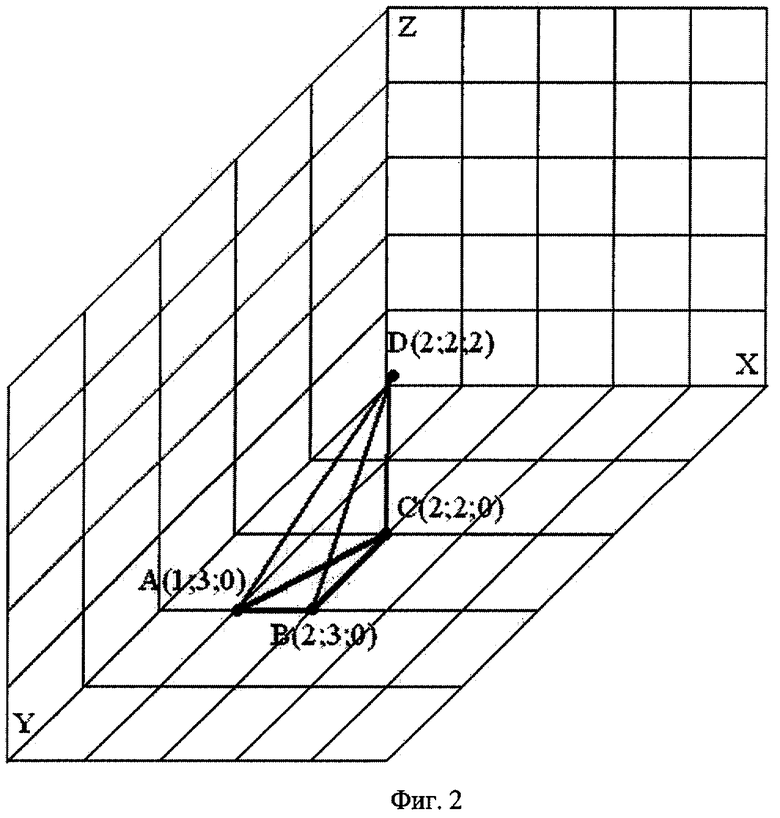
На фиг.1 показано в общем виде расположение лазерных дальномеров (точки A(x1,y1,z1), B(x2,y2,z2), С(х3,у3,z3) и контролируемая точка кузова автомобиля D(x,y,z), координаты которой необходимо найти; на фиг.2 продемонстрирован конкретный численный пример определения координат точки D.
Измерение контролируемых размеров кузова производим следующим образом. Устанавливаем лазерные дальномеры на матрицу (разграфленную поверхность) с вершинами А, В и С (координаты вершин и расстояния между вершинами известны благодаря матрице). Затем наводим лазерные дальномеры на контролируемую точку D. Таким образом, мы получаем значения длин AD, BD и CD (a1, a2 и а3 соответственно), что позволяет нам составить следующую систему уравнений: 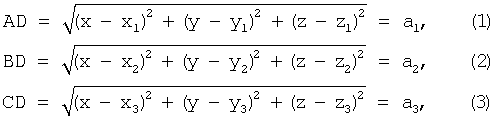
возводим в квадрат левую и правую части уравнений системы:
(x-x1)2+(y-y1)2+(z-z1)2=a1 2,
(x-x2)2+(y-y2)2+(z-z2)2=a2 2,
(x-x3)2+(y-y3)+(z-z3)2=a3 2,
далее преобразуем квадраты разностей:
х2-2хх1+х1 2+у2-2уy1+у1 2+z2-2zz1+z1 2=a1 2,
х2-2хх2+х2 2+у2-2уy2+у2 2+z2-2zz2+z2 2=a2 2,
х2-2хх3+х3 2+у2-2уy3+у3 2+z2-2zz3+z3 2=a3 2.
Затем от первого уравнения отнимаем второе, от второго третье и от первого третье
2х(х2-х1)+2y(y2-y1)+2z(z2-z1)+х1 2-х2 2+y1 2-y2 2+z1 2-z2 2=а1 2-a2 2;
2х(х3-х2)+2y(y3-y2)+2z(z3-z2)+х2 2-х3 2+y2 2-y3 2+z2 2-z3 2=а2 2-a3 2;
2х(х3-х1)+2y(y3-y1)+2z(z3-z1)+х1 2-х3 2+y1 2-y3 2+z1 2-z3 2=а1 2-a3 2.
Поскольку координаты точек A(x1, y1, z1), В(х2, y2, z2) и С(х3, y3, x3) известны (заданы), введем обозначения
x1 2-х2 2+у1 2-y2 2+z1 2-z2 2=b1;
x2 2-х3 2+у2 2-y3 2+z2 2-z3 2=b2;
x1 2-х3 2+у1 2-y3 2+z1 2-z3 2=b3.
и
а1 2-а2 2=c1;
а2 2-а3 2=с2;
a1 2-а3 2=c3.
После чего получим:
2х(х2-x1)+2y(y2-y1)+2z(z2-z1)+b1=с1;
2х(х3-x2)+2y(y3-y2)+2z(z3-z2)+b2=с2;
2х(х3-x1)+2y(y3-y1)+2z(z3-z1)+b3=с3.
В итоге получаем финальную систему трех уравнений с тремя неизвестными, решая которую находим искомые координаты точки D:
х(х2-x1)+y(y2-y1)+z(z2-z1)=(c1-b1)/2;
х(х3-x2)+y(y3-y2)+z(z3-z2)=(c2-b2)/2;
х(х3-x1)+y(y3-y1)+z(z3-z1)=(c3-b3)/2.
Аналогично находим координаты второй точки, а зная координаты точек нетрудно найти расстояние между ними.
Рассмотрим численный пример, представленный на фиг.2. Зададим координаты лазерных дальномеров - А(1;3;0), В(2;3;0) и С(2;2;0). Необходимо найти координаты искомой (контролируемой) точки D.
Измеренные длины лучей в нашем случае составили AD=2,449, BD=2,236 и CD=2. Подставляя исходные данные в уравнения, производим промежуточные расчеты
а1 2-а2 2=c1=1;
а2 2-а3 2=с2=1;
a1 2-а3 2=c3=2.
x1 2-х2 2+y1 2-y2 2+z1 2-z2 2=b1=1-4+9-9+0-0=-3;
x2 2-х3 2+y2 2-y3 2+z2 2-z3 2=b2=4-4+9-4+0-0=5;
x1 2-х3 2+y1 2-y3 2+z1 2-z3 2=b3=1-4+9-4+0-0=2.
x(2-2)+y(2-3)+z(0-0)=(1-5)/2, следовательно y=2;
х(2-1)+y(3-3)+z(0-0)=(1+3)/2, следовательно х=2.
Подставим х и y в первоначальное уравнение (1) и найдем значение z:
a1 2=х2-2xx1+x1 2+у2-2yy1+у1 2+z2-2zz1+z1 2=4-2·2·1+1+4-2·2·3+9+z2=6
z2=6-4+4-1-4+12-9=4;
z=2.
Таким образом, получаем пространственные координаты контролируемой точки - D(2;2;2), что совпадает с эталонным размером.
Преимуществом данного способа измерения является меньшее количество измеряемых величин (три линейных размера вместо четырех углов), что само уже обеспечивает повышение точности измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241208C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2759116C1 |
| СПОСОБ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325705C1 |
| УСТРОЙСТВО ЛОКАЦИИ И НАВИГАЦИИ | 2012 |
|
RU2525228C2 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ЗАГРУЗКИ ФЕРРИТОВЫХ ИЗДЕЛИЙ ПРИ СПЕКАНИИ В КАМЕРНОЙ ПЕЧИ | 1989 |
|
SU1690288A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УСТАНОВКИ КОЛЕС И ПОЛОЖЕНИЯ ОСЕЙ И МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2314492C1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ СЕЙСМОРАЗВЕДКИ | 1987 |
|
SU1441943A1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ СКВАЖИНЫ, ОБОРУДОВАННОЙ ГЛУБИННЫМ НАСОСОМ | 1990 |
|
RU2011812C1 |
Изобретение относится к области машиностроения и может быть использовано для контроля геометрии при правке кузовов транспортных средств. Способ включает измерение пространственных координат точек с помощью лучей измерительных элементов, которые наводят на контролируемые точки кузова автомобиля. В качестве измерительных элементов используют три лазерных дальномера, которым задают пространственные координаты, наводят три луча на одну точку кузова, замеряют длину лучей и определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат путем решения системы уравнений. Потом наводят три луча на следующую точку кузова и определяют ее пространственные координаты аналогично первой точке. Затем определяют расстояние между двумя точками по полученным координатам, которое сравнивают с эталонным размером. Повышается точность измерения за счет уменьшения количества измеряемых величин. 2 ил.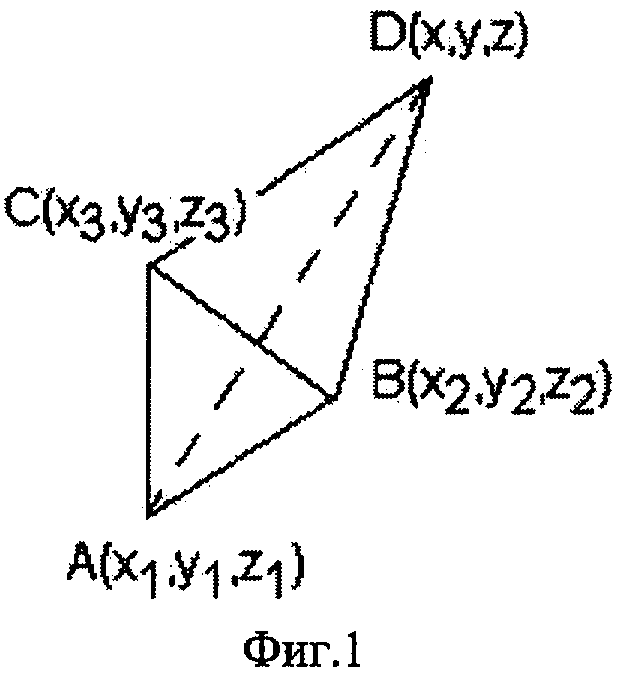
Способ контроля положения точек кузова транспортного средства при правке, включающий измерение пространственных координат точек с помощью лучей измерительных элементов, которые наводят на контролируемые точки кузова автомобиля, отличающийся тем, что в качестве измерительных элементов используют три лазерных дальномера, которым задают пространственные координаты, наводят три луча на одну точку кузова, замеряют длину лучей и определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат путем решения системы уравнений:
x(x2-x1)+y(y2-y1)+z(z2-z1)=(c1-b1)/2;
x(x3-x2)+y(y3-y2)+z(z3-z2)=(c2-b2)/2;
x(x3-x1)+y(y3-y1)+z(z3-z1)=(c3-b3)/2,
где (x1 y1, z1) - координаты первого дальномера;
(x2, y2, z2) - координаты второго дальномера;
(х3, y3, z3) - координаты третьего дальномера;
(x, y, z) - координаты искомой (контролируемой) точки кузова;
c1=a1 2-a2 2;
c2=a2 2-a3 2;
c2=a1 2-a3 2,
где a1 - длина луча от первого дальномера до контролируемой точки;
a2 - длина луча от второго дальномера до контролируемой точки;
а3 - длина луча от третьего дальномера до контролируемой точки;
b1=x1 2-x2 2+y1 2-y2 2+z1 2-z2 2;
b2=x2 2-x3 2+y2 2-y2 3+z2 2-z3 2;
b3=x1 2-x3 2+y1 2-y2 3+z1 2-z3 2,
потом наводят три луча на следующую точку кузова и определяют ее пространственные координаты аналогично первой точке и определяют расстояние между двумя точками по полученным координатам, которое сравнивают с эталонным размером.
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТОЧЕК КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2003 |
|
RU2239505C1 |
| Способ управления процессом правки изделий | 1984 |
|
SU1266601A1 |
| Установка для контроля положения точек кузова транспортного средства при правке | 1989 |
|
SU1706742A1 |
| Смазочная композиция | 1986 |
|
SU1361170A1 |
| US 4463937 A, 07.08.1984. | |||

