Изобретение относится к способам контроля положения точек кузова транспортного средства и может использоваться в машиностроительной промышленности, авторемонтном производстве и в автосервисах для контроля геометрии кузовов после и в процессе правки.
Известен способ измерения положения точек кузова при ремонте, реализуемый с помощью линейных мер длины - рулетки, штангенциркуля, металлической линейки [см. “Приемка, ремонт и выпуск из ремонта кузовов легковых автомобилей предприятиями автотехобслуживания”. РД 37.009.024-92, М. АО “Автосельхозмаш-Холдинг”, 1992 г.]. Он обеспечивает измерение взаимного положения точек кузова, лежащих в одной плоскости и доступных для измерения линейной мерой.
Недостатком данного способа является низкая производительность, возможность прогиба линейной меры при больших расстояниях и невозможность автоматизации измерений.
Известен способ измерения, реализованный в установке для контроля положения точек кузова транспортного средства [см. а.с. №1706742 СССР, кл. B 21 D 1/12, опубл. 23.01.92 г.]. Он предусматривает измерение положения точек с помощью измерительных элементов, выполненных в виде датчиков поворота, рамок, ролика и нерастяжимой нити, один конец которой закреплен на ролике, а другой оснащен узлом крепления к контролируемой точке кузова, аналого-цифрового преобразователя, ЭВМ и устройства представления информации. Измерительный элемент позволяет определять координаты точки в сферической системе координат - по углам между проекциями радиус-вектора(нити) на координатные плоскости и длине радиус-вектора.
Недостатками способа являются необходимость и сложность крепления нити на кузове в установленном месте (в контрольной точке), что увеличивает продолжительность и снижает точность измерений, необходимость большого количества (не менее трех) точек, а следовательно, и измерительных элементов, что увеличивает стоимость установки, необходимость измерения длины нити другой линейной мерой.
Задачей изобретения является повышение точности и снижение продолжительности измерений положения точек кузова.
Поставленная задача решается тем, что в способе измерения положения точек кузова транспортного средства при правке, включающем измерение пространственных координат точек, согласно изобретению задают расстояние между двумя измерительными элементами, в качестве которых используют излучатели лазерного типа, установленные на матрице и соединенные с датчиками угла поворота в двух плоскостях, наводят оба луча на одну точку кузова, мысленно проецируют ее на горизонтальную плоскость и строят виртуальную пирамиду, определяют угол между одним из лучей и его проекцией на горизонтальную плоскость и углы между проекциями на самой горизонтальной плоскости и определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат, потом наводят оба луча на вторую точку кузова, определяют пространственные координаты второй точки кузова аналогично первой точке и определяют расстояние между двумя точками по трем координатам, которое сравнивают с эталонным размером.
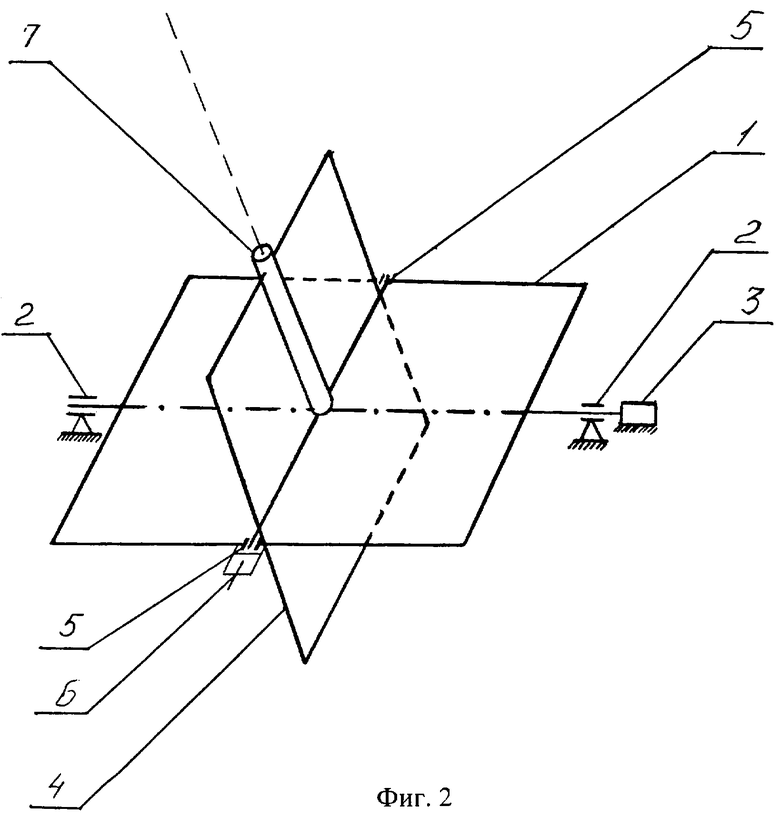
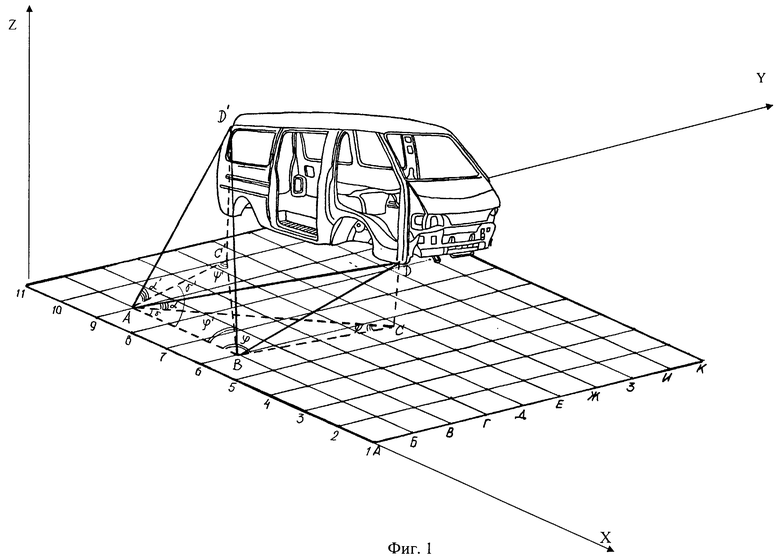
На Фиг.1 показана общая схема измерения по предлагаемому способу; на фиг.2 - измерительный элемент на основе излучателя лазерного типа.
Измерительный элемент состоит из рамки 1, ось которой закреплена в неподвижных опорах 2. На оси рамки 1 расположен датчик 3 углового перемещения. На рамке 1 закреплена вторая рамка 4 в опорах 5. На оси вращения рамки 4 установлен датчик 6 углового перемещения. В рамке 4 закреплен излучатель 7 лазерного типа.
Измерение контрольных размеров кузова производим следующим образом (см. Фиг.1). Устанавливаем измерительные элементы на матрицу (разграфленную поверхность) в точки с координатами А и В (расстояние между ними известно и кратно шагу матрицы). Берем нулевые точки отсчета для измерения углов ϕ, γ и α: ϕ - это угол АВС; γ - это угол ВАС; α - это угол DAC.
Для отсчета нуля углов ϕ и γ наводим излучатели 7 друг на друга и фиксируем нуль. Для отсчета нуля угла α берем горизонтальную плоскость, которую определяем как перпендикуляр к вертикали (вертикаль выставляем по отвесу).
Наводим оба излучателя 7 на точку D. Мысленно проецируем точку D на горизонтальную плоскость, получаем точку С, строим виртуальную пирамиду ABCD. Измеряем значения углов ϕ, γ, α. Рассчитываем угол ψ=180-(γ+ϕ), где ψ - это угол АСВ.
Из треугольной пирамиды ABCD вычисляем координаты точки D, а именно так, как известно, что
AB/Sinψ=AC/Sinϕ,
то
AC=(AB·Sinϕ)/Sinψ.
Так как
AC=AD·Cosα,
а
AD=AC/Cosα,
то высота пирамиды
DC=AD·Sinα.
Зная длину катета АС и величину угла γ, находим проекции вектора АС на оси Х и Y. Проекция на ось Z=DC. Таким образом, определены координаты точки D (х, у, z).
Далее наводим оба излучателя 7 на точку D'. Мысленно проецируем точку D' на горизонтальную плоскость, получаем точку С', строим виртуальную пирамиду ABC'D'. Измеряем значения углов ϕ', γ', α'. Координаты точки D' (x1, y1, z1) определяем аналогично координатам точки D. Зная координаты точек D и D', можно определить отрезок [DD'], который мы сравниваем с эталонным размером (регламентируемым нормативными документами).
Пример конкретного выполнения
Устанавливаем излучатели 7 лазерного типа с устройством измерения углов на матрицу в точки А и В. Шаг матрицы равен 800 мм, следовательно, расстояние АВ=2400 мм. Наводим сначала оба луча на точку D. Мысленно проецируем точку D на горизонтальную плоскость и получаем точку С. Строим виртуальную пирамиду ABCD. Определяем угол α - это угол между лучом AD и его проекцией АС, и углы γ и ϕ. Угол ψ - это угол между проекциями АС и АВ. Угол ϕ - это угол между проекциями АВ и ВС. Угол ψ - угол между проекциями АС и ВС. Эти углы в нашем примере равны: γ=57°; ϕ=40°; α=52,27°; γ=180°-(57°+40°)=83°.
Вычисляем координаты точки D
AB/sinψ=AC/sinϕ,
AC=(AB·sinϕ)/sinψ=(2400·0,643)/0,9925=1554,86 мм,
AC=AD·cosα,
AD=AC/cosα=1554,86/0,612=2540,6 мм,
DC=AD·sinα=2540,6·0,7909=2009,36 мм.
Зная длину катета АС и величину угла γ, находим проекции вектора АС на оси Х и Y. Таким образом, определены координаты точки D (x, y, z).
Точка D (2046,4; 1303,89; 2009,36).
Наводим оба излучателя 7 на точку D'. Мысленно проецируем точку D' на горизонтальную плоскость и получаем точку С'. Строим виртуальную пирамиду ABC'D' с углами α', γ', ϕ', ψ'. Эти углы в нашем примере равны: α'=42,83°; γ'=36,3°; ϕ'=62°; ψ'=180°-(36,3°+62°)=81,7°.
Вычисляем координаты точки D':
AB/sinψ'=AC'/sinϕ'
AC'=(AB·sinϕ')/sinψ'=(2400·0,883)/0,9895=2141,68 мм.
AC'=AD'·cosα',
AD'=AC'/cosα'=2141,68/0,733=2921,8 мм.
D'C'=AD'·sinα'=2921,8·0,6798=1986,24 мм.
Зная длину катета АС' и величину угла γ', находим проекции вектора АС' на оси Х и У. Таким образом, определены координаты точки D' (x1, y1, z1).
Точка D' (2926,04; 1267,9; 1986,24).
Расстояние между точками D и D' будет определяться как разность координат


При погрешности измерения угла в 5 угловых минут (что соответствует современным угловым датчикам) погрешность измерения вышеуказанного расстояния составит 0,168%.
Преимуществами данного способа являются следующие:
- при помощи всего лишь двух измерительных элементов он позволяет контролировать все видимые (с данных положений измерительных элементов на матрице) точки кузова, а при необходимости измерения с другой стороны измерительные элементы устанавливаются в другие гнезда матрицы;
- повышается точность измерения вследствие более точного наведения лучей на контролируемую точку;
- повышаются скорость измерения и производительность способа вследствие исключения необходимости закрепления нитей на контролируемой точке кузова;
- отпадает необходимость измерения длины нити другой линейной мерой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТОЧЕК КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2005 |
|
RU2291751C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ДЕФОРМАЦИЙ ПОВРЕЖДЕННОГО КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПРАВКЕ | 2005 |
|
RU2314172C2 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ ЛИНЕЙНОМ ДВИЖЕНИИ ОБЪЕКТА | 2002 |
|
RU2210741C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА ЗЕМНОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2231757C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2256870C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УСТАНОВКИ КОЛЕС И ПОЛОЖЕНИЯ ОСЕЙ И МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2314492C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2279035C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЛЩИНЫ СНЕЖНОГО ПОКРОВА В ЛАВИННЫХ ОЧАГАХ | 2013 |
|
RU2547000C1 |
Изобретение относится к области машиностроения и может использоваться для контроля геометрии кузовов при правке. Способ включает измерение пространственных координат точек. Для этого задают расстояние между двумя измерительными элементами, в качестве которых используют излучатели лазерного типа. Их устанавливают на матрице и соединяют с датчиками угла поворота в двух плоскостях, наводят оба луча на одну точку кузова. Мысленно проецируют эту точку на горизонтальную плоскость и строят виртуальную пирамиду, определяют угол между одним из лучей и его проекцией на горизонтальную плоскость и углы между проекциями на самой горизонтальной плоскости. Затем определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат, наводят оба луча на вторую точку кузова и определяют пространственные координаты второй точки кузова аналогично первой точке. Далее определяют расстояние между двумя точками по трем координатам, которые сравнивают с эталонным размером. Повышаются производительность процесса и точность контроля. 2 ил.
Способ контроля положения точек кузова транспортного средства при правке, включающий измерения пространственных координат точек, отличающийся тем, что задают расстояние между двумя измерительными элементами, в качестве которых используют излучатели лазерного типа, установленные на матрице и соединенные с датчиками угла поворота в двух плоскостях, наводят оба луча на одну точку кузова, мысленно проецируют ее на горизонтальную плоскость и строят виртуальную пирамиду, определяют угол между одним из лучей и его проекцией на горизонтальную плоскость и углы между проекциями на самой горизонтальной плоскости и определяют пространственные координаты вышеуказанной точки кузова в заданной системе координат, потом наводят оба луча на вторую точку кузова и определяют пространственные координаты второй точки кузова аналогично первой точке и определяют расстояние между двумя точками по трем координатам, которые сравнивают с эталонным размером.
| Установка для контроля положения точек кузова транспортного средства при правке | 1989 |
|
SU1706742A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПРАВКИ ИЗДЕЛИЙ | 1991 |
|
RU2006311C1 |
| US 4463937 A, 07.08.1984 | |||
| СПОСОБ ПРОИЗВОДСТВА АЛЮМИНИЯ | 2000 |
|
RU2185456C2 |

