Изобретение относится к авиации и предназначено для определения расстояния от летательного аппарата до аппроксимирующей траектории препятствия в полете, служит для предотвращения столкновения с другими ЛА и птицами.
Известен способ определения расстояния между воздушными судами, реализованный в устройстве, описанном в патенте на изобретение РФ №2256195, которое служит для предотвращения столкновения воздушных судов и повышения безопасности полетов за счет определения истинного расстояния между воздушными судами с учетом высот их полета, которое определяется по формуле

где a1, h1, d1 - азимут, высота и наклонная дальность первого ЛА;
а2, h2, d2 - азимут, высота и наклонная дальность второго ЛА.
Недостатком этого способа определения расстояния между воздушными судами является значительное количество оборудования, используемого для определения расстояния, что снижает надежность системы в целом при ее технической реализации, невысокая точность, обусловленная применением радиолокационных измерительных средств, а также использование расстояния между самолетами в качестве параметра, определяющего возможность столкновения. Уменьшение относительного расстояния не является однозначным признаком приближающегося столкновения, поскольку траектории ЛА и препятствия могут лежать в различных плоскостях, быть даже пересекающимися, но столкновения при этом может и не быть.
Известны устройства локации источников излучения, размещаемых на подвижных объектах, например патенты RU 2275652 С2, US 4193689, №4209254; GB 2002986 A, №1520154. Эти устройства содержат размещенные на подвижном объекте реперные источники (РИ) излучения, а на неподвижном объекте - два или более фотоприемных оптико-локационных блоков, определяющих углы-пеленги реперных источников, и блоки определения координат РИ излучения и ориентации подвижного объекта.
В указанных устройствах реализуется следующая последовательность действий:
- определяют сигналы, соответствующие положению изображения РИ в плоскости матричного фотодетектора;
- по полученным сигналам с учетом фокусного расстояния оптической схемы формирователя изображения РИ определяют углы-пеленги каждого РИ подвижного объекта;
- на основании данных углов-пеленгов с учетом известного расстояния между точками определения углов-пеленгов определяют координаты РИ.
Наиболее близким к изобретению является устройство, описанное в книге «Техническое зрение роботов» под общей редакцией д.т.н. Ю.Г.Якушенкова, - М.: Машиностроение, 1990 г., стр.168., содержащее разнесенные объективы с фотоматрицами в их фокальных плоскостях и вычислитель, содержащий модуль программной обработки изображений, обеспечивающий нахождение идентичных точек, по координатам которых находят дальность до объекта.
Недостаток этого устройства состоит в том, что измеряемая с его помощью дальность до объекта не может быть использована для решения задачи достоверного прогнозирования столкновения с препятствием.
Задачей предлагаемых способа и устройства является повышение оперативности и достоверности прогнозирования столкновения с препятствием за счет использования в качестве критерия пересечение аппроксимирующей траектории препятствия с сферой радиуса Rо ла+Rо пр, где Ro ла - радиус сферы, в которую вписан ЛА, Ro пр - радиус сферы, в которую вписано препятствие, - характерный радиус препятствия.
Решение технической задачи состоит в том, что в способе для предотвращения столкновения летательного аппарата с препятствием, основанном на определении координат обоих объектов, используют оптические средства для измерения относительного положения препятствия, осуществляют обработку изображений подвижного объекта, а именно определяют характерный радиус препятствия, определяют координаты его идентичной точки на фотоматрицах, установленных на подвижном объекте, и определяют координаты и расстояние до препятствия, а затем определяют расстояние от ЛА до аппроксимирующей траектории препятствия (прямой или окружности) и проверяют условие достаточной удаленности этой траектории от ЛА, которое служит критерием для принятия решения о возможности столкновения с препятствием.
В устройстве для предотвращения столкновения летательного аппарата с препятствием, содержащем два разнесенных объектива с фотоматрицами, размещенными в фокальных плоскостях объективов, соединенные с вычислителем, включающим модуль обработки изображения препятствия, в вычислитель дополнительно введены модуль определения вида траектории препятствия и контроля сближения, два модуля анализа условий столкновения в случае движения по прямой или окружности, схема ИЛИ и коммутатор сигналов, при этом модуль обработки изображений препятствия своим выходом связан с входом модуля анализа траектории препятствия и контроля сближения, при этом модуль обработки изображения препятствия своим выходом связан с входом модуля определения вида траектории препятствия и контроля сближения, модуль анализа условий столкновения в случае движения по прямой, где вычисляют значения координат местоположения препятствия относительно летательного аппарата и расстояния между ними в два момента времени, определяют расстояние от летательного аппарата до прямой, задаваемой вектором относительной скорости препятствия и непрерывно проверяют выполнение условия столкновения (облета) препятствия, своим входом связан с первым выходом модуля определения вида траектории и контроля сближения, модуль анализа условий столкновения в случае движения по окружности, где вычисляют значения координат местоположения препятствия относительно летательного аппарата и расстояния между ними в три момента времени, определяют расстояние от летательного аппарата до аппроксимирующей окружности и непрерывно проверяют выполнение условия столкновения (облета) препятствия, своим входом связан с вторым выходом модуля определения вида траектории и контроля сближения, схема ИЛИ, формирующая сигнал ПС - приближение столкновения, своими входами связана с логическими выходами модулей анализа условий столкновения в случаях движений по прямой и окружности L1 и L2 соответственно, коммутатор сигналов, формирующий на своем выходе сигнал tст - время до столкновения, своими информационными входами связан с выходами модулей анализа условий столкновения в случаях движения по прямой и окружности, а своим управляющим входом связан с логическим выходом L2 модуля анализа условий столкновения в случае движения по окружности.
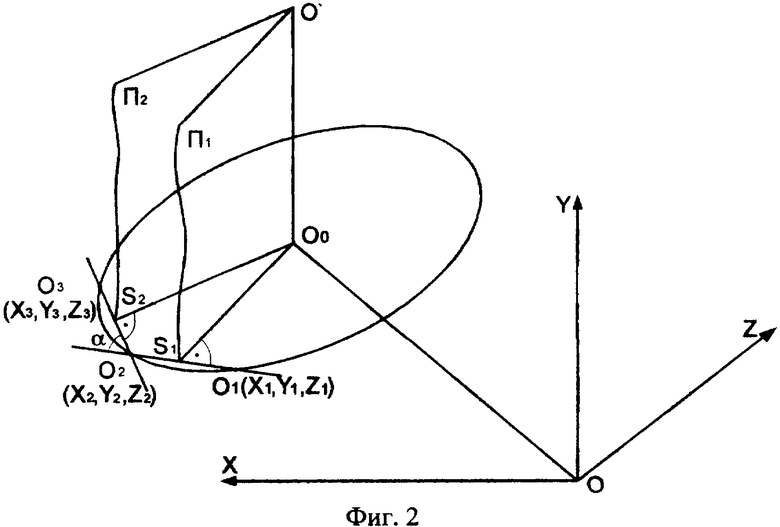
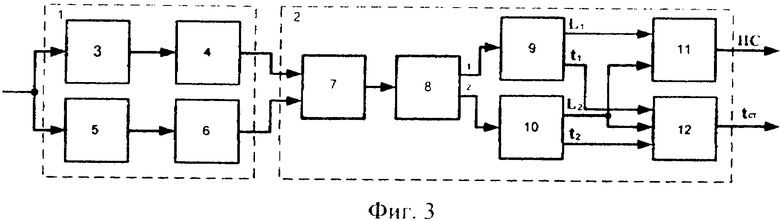
На фиг.1 показана схема размещения фотоматриц в процессе определения местоположения препятствия относительно ЛА, на фиг.2 - система координат, связанная с ЛА и аппроксимирующая окружность, на фиг.3 - структурная схема устройства для определения расстояния от летательного аппарата до аппроксимирующей траектории препятствия.
Способ реализуется следующим образом. Прямоугольная система координат OXYZ (фиг.1) связана с подвижным объектом. Начало системы координат O1Y1Z1 совпадает с геометрическим центром фотоматрицы ФМ1 и фокусом объектива, оптический центр которого находится в точке L1. Начало системы координат O2Y2Z2 совпадает с геометрическим центром фотоматрицы ФМ2 и фокусом объектива, оптический центр которого находится в точке L2. Идентичная точка препятствия находится в точке Р. Центры фотоматриц расположены на оси OZ и равноудалены от начала координат О.
Для определения координат точки Р выражаются векторы S1P и S2Р, для этого используется подобие пар треугольников F1S1O1, PS1N и F2S2O2, PS2N:
где Px - проекция вектора S1P либо S2P на ось OX, равная PN; F=O1F1=O2F2 - фокусное расстояние объектива телекамеры; i, j, k - единичные орты.
Находится вектор RP

Из треугольника PS1S2 выражается известное расстояние между фотоматрицами В, равное модулю вектора S1S2
SлР-SпP=SлSп.
Подставляя выражения для векторов S1P и S2Р в последнее равенство, определяется

Отсюда выражается квадрат модуля вектора S1S2

и вычисляется координата х вектора RP

Остальные координаты вектора RP выражаются из соотношения (1)

Расстояние S до препятствия вычисляется по известной формуле

Прогнозирование возможного столкновения основано на определении уравнения аппроксимирующей траектории движения, которая может быть прямой (неуправляемое движение ЛА и препятствия) либо кривой второго порядка (управляемое движение ЛА и препятствия).
В случае управляемого движения ЛА и препятствия гипотеза о их прямолинейном относительном движении может привести к значительным ошибкам в прогнозировании координат точки столкновения. Поэтому рассматривается задача о прогнозировании столкновения в предположении, что относительное движение препятствия осуществляется по пространственной кривой второго порядка - окружности. Основой для такого выбора служит:
- при управляемом движении ЛА и препятствия гипотеза о прямолинейном относительном движении может обеспечивать удовлетворительную аппроксимацию траектории на коротком отрезке времени;
- аппроксимирующие кривые более высокого порядка требуют существенных вычислений и большего времени наблюдения, поэтому в пределах одного простейшего маневра типа пространственный разворот (с изменением высоты и курса), выполняемого с постоянной перегрузкой, наиболее целесообразной аппроксимирующей кривой является окружность.
В качестве критерия изогнутости траектории примем условие α>α0, где α - угол между отрезками O1O2 и О2О3, а α0 - малое пороговое значение угла α.
Угол α найдем из известного выражения для скалярного произведения векторов  и
и  а также примем, что
а также примем, что 

тогда

При выполнении условия (5) принимаем гипотезу о движении препятствия по окружности, в противном случае - движение по прямой.
Для определения параметров относительного движения препятствия по прямой производится два измерения его координат, тогда относительная скорость находится как отношение приращений координат и времени между моментами измерений:




где Vотн - относительная скорость препятствия, tст - время до столкновения с препятствием в предположении, что скорость постоянна.
Записывается уравнение прямой, проходящей через две точки Рi и Рi+1, в которых препятствие находилось в моменты времени ti и ti+1,
где x0, y0, z0 - координаты точки Рi, x1, y1, z1 - координаты точки Pi+1.
Записывают уравнение плоскости, перпендикулярной этой прямой, как условие перпендикулярности вектора (x1-x0, y1-у0, z1-z0), лежащего на прямой, и произвольного вектора (x, y, z), лежащего в плоскости,
х(х1-x0)+y(y1-y0)+z(z1-z0)=0.
Путем решения двух последних уравнений относительно x, y, z находят координаты точки пересечения прямой и плоскости, длина радиус-вектора этой точки и есть наименьшее расстояние S0 от начала координат до прямой.
Приводят уравнения к следующему виду:
Систему линейных алгебраических уравнений решают методом Крамера. Для этого записывают главный и вспомогательные определители:




Искомые координаты точки пересечения прямой и плоскости вычисляют по соотношениям:



Расстояние до прямой вычисляют по известной формуле:

Условие столкновения (облета) препятствия при прямолинейном равномерном его движении выражают в виде неравенства

Для определения параметров относительного движения препятствия по окружности производится три измерения его координат в последовательные моменты времени (фиг.2), обозначим их (х1, y1, z1), (x2, y2, z2) и (х3, y3, z3).
Система координат OXYZ связана с ЛА, его продольная ось совпадает с осью ОХ, поперечная ось - с осью OZ.
Найдем вектор r⊥, перпендикулярный плоскости, проходящей через эти точки, для этого запишем векторное произведение векторов, соединяющих две пары точек.

Запишем уравнение плоскости, проходящей через известные точки, выразив для этого условие перпендикулярности произвольного вектора, лежащего в плоскости, и вектора r⊥.

Определим координаты центра аппроксимирующей окружности. Эту задачу будем решать в предположении постоянства относительной скорости ЛА и препятствия и равных промежутков времени между моментами измерений координат точек O1O2, О2О3 и проходящих через их середины.
Уравнение плоскости П1

Уравнение плоскости П2

Совместное решение уравнений (10), (11), (12) как системы позволяет определить координаты центра окружности О0, для этого упростим эти уравнения путем введения соответствующих обозначений.
где [(y2-y1)(z2-z3)-(y2-y3)(z2-z1)]=A1, (x2-x3)(z2-z1)-(x2-x1)(z2-z3)=A2, [(х2-х1)(y2-y3)-(х2-x3)(y2-y1)]=А3, А1х1+А2y1+А3z1=Р1,
Численное решение системы уравнений (13) может оказаться невозможным, если препятствие движется по прямой, уравнения в этом случае будут линейно независимы. Чтобы решение системы уравнений (13) было возможным, целесообразно проверять кривизну траектории. В качестве критерия изогнутости траектории примем условие α>α0, где α - угол между отрезками O1O2 и O2O3, а α0 - малое пороговое значение угла α.
Угол α найдем из известного выражения для скалярного произведения векторов  и
и  а также примем, что
а также примем, что 

тогда 

При выполнении условия (14) принимаем гипотезу о движении препятствия по окружности, в противном случае - движение по прямой.
С учетом введенных обозначений выразим искомые координаты точки О0, используя для этого формулы Крамера



где
Уравнение окружности, аппроксимирующей траекторию движения препятствия, получим, считая, что окружность есть результат пересечения сферической поверхности и плоскости, в которой совершается маневр.

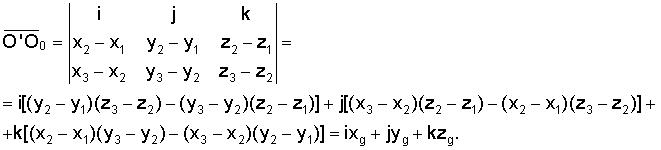
Для нахождения расстояния от ЛА (точка О) до траектории препятствия запишем уравнение плоскости, образованной перпендикуляром к плоскости окружности O'O0 и началом координат. Нормаль к этой плоскости найдем как векторное произведение
 где вектор O'O0 с координатами (xg yg zg) имеет вид
где вектор O'O0 с координатами (xg yg zg) имеет вид
Тогда
Уравнение плоскости, образованной прямыми O'О0 и ОО0 запишем в виде условия перпендикулярности произвольного вектора этой плоскости с координатами (x, y, z) и вектора 

Координаты точек пересечения этой плоскости с окружностью найдем, решая совместно систему уравнений (15) с уравнением (16)
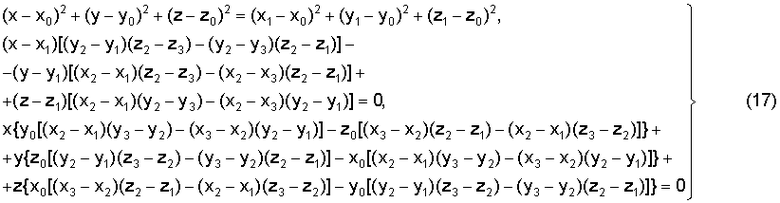
Чтобы получить аналитическое решение этой системы уравнений, введем следующие обозначения для постоянных коэффициентов, что позволяет упростить вид уравнений:
R2=(x1-x0)2+(y1-y0)2+(z1-z0)2;





С учетом введенных обозначений система уравнений (17) имеет следующий вид:
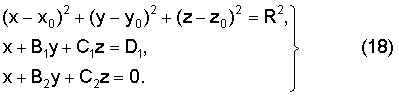
Выразим переменную х из третьего уравнения и подставим во второе уравнение, а затем из второго уравнения выразим переменную y и подставим в первое уравнение, получим

x+B2y+C2z=0.
Найдем решение первого уравнения, предварительно упростим его, введя следующие обозначения и раскрыв скобки:


Остальные координаты найдем, подставляя полученное выражение во второе и третье уравнения системы (18):

Из двух полученных точек с координатами (хП1, yП1, zП1) и (хП2, yП2, zП2) необходимо выбрать точку, ближе расположенную к ЛА (точка О).

 наименьший из радиусов RП1 и RП2 обозначим Rн:
наименьший из радиусов RП1 и RП2 обозначим Rн:

Кроме этого, должно выполняться условие сближения препятствия с ЛА, что проверяется сравнением расстояний до препятствия в двух последовательных точках, например O2 и O1:

Если последнее условие выполняется, то точка, удаленная на расстояние RПmin, является точкой возможного столкновения. Окончательно вопрос о столкновении (облете) препятствия решается путем проверки следующего условия

Таким образом, решение задачи о прогнозировании положения точки возможного столкновения с препятствием основано на двух гипотезах: первая - предположение о прямолинейном относительном движении препятствия; вторая - предположение о криволинейном (по окружности) относительном движении препятствия. Соответственно алгоритм должен иметь две ветви, в которых проверяется свое условие об облете (столкновении).
Устройство (фиг.3) содержит блок приемников изображений препятствия 1, включающий первый объектив 3 и первую фотоматрицу 4, второй объектив 5 и вторую фотоматрицу 6, вычислитель 2, включающий в себя модуль анализа изображений препятствия 7, модуль 8 определения вида траектории препятствия и контроля сближения, модуль 9 анализа условий столкновения в случае движения по прямой, модуль 10 анализа условий столкновения в случае движения по окружности, схема ИЛИ 11 и коммутатор сигналов 12.
Устройство работает следующим образом.
Изображения препятствия проецируются первым и вторым объективами 3, 5 на первой и второй фотоматрицах 4, 6 соответственно. Модуль обработки изображений препятствия 7 определяет координаты идентичных точек изображений препятствия и характерный радиус препятствия, которые поступают в модуль 8 определения вида траектории препятствия и контроля сближения, где производится вычисление местоположения препятствия относительно подвижного объекта - координат Рх, Рy, Pz и дальности S согласно выражениям (2), (3) и (4).
В модуле 9 анализа условий столкновения в случае движения по прямой вычисляется расстояние от летательного аппарата до прямой, определяемой вектором относительной скорости препятствия R0 согласно выражению (8), и проверяется условие столкновения (облета) препятствия (9).
В модуле 10 анализа условий столкновения в случае движения по кривой вычисляется расстояние от летательного аппарата до аппроксимирующей окружности Rн согласно выражению (19) и проверяется условие столкновения (облета) препятствия (20).
Схема ИЛИ 11 формирует сигнал ПС - приближение столкновения.
Коммутатор сигналов 12 формирует на своем выходе сигнал tст - время до столкновения.
Для повышения достоверности и оперативности прогнозирования столкновения используются прецизионные датчики информации, а также критерий приближающегося столкновения - пересечение аппроксимирующей траектории препятствия (прямой или окружности) с сферой радиуса Ro ла+Ro пр.
Источники информации
1. Патент РФ на изобретение №2256195, кл. G01S 13/93, опубл. 10.07.2005, бюл.19 (прототип на способ).
2. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - c.168.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ЛЕТАТЕЛЬНОГО АППАРАТА ДО ВЕКТОРА ОТНОСИТЕЛЬНОЙ СКОРОСТИ ПРЕПЯТСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326406C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401436C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
Изобретение относится к прогнозированию возможности столкновения (облета) летательного аппарата (ЛА) с препятствием. Достигаемый технический результат изобретения - повышение достоверности и оперативности прогнозирования столкновения ЛА с препятствием. Сущность изобретения заключается в том, что по координатам препятствия определяют вид траектории движения препятствия (прямая, либо окружность), вычисляют кратчайшее расстояние от ЛА до аппроксимирующей траектории препятствия, что позволяет прогнозировать возможность облета или столкновения с препятствием. Устройство для осуществления способа содержит блок приемников изображений, содержащий два разнесенных идентичных объектива с приемниками изображений, вычислитель, включающий модуль анализа изображений препятствия и модуль определения вида траектории и контроля сближения, модули анализа условия столкновения в случаях движения препятствия по прямой и окружности соответственно, схему ИЛИ, которая формирует сигнал о столкновении, коммутатор сигналов формирующий сигнал tст - время до столкновения с препятствием. 2 н.п. ф-лы, 3 ил.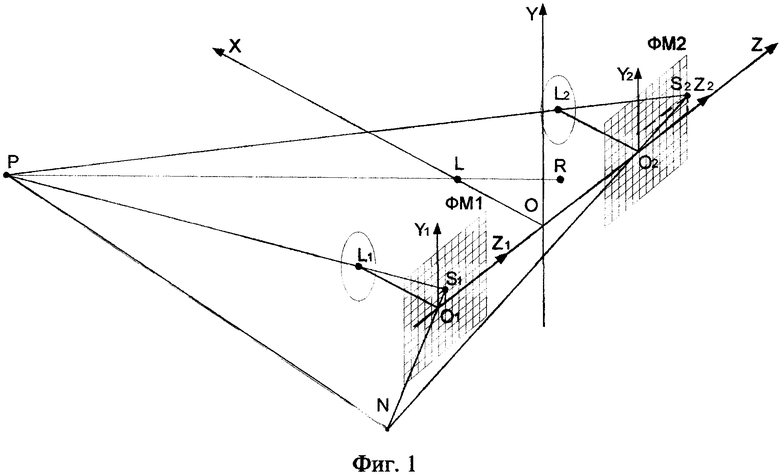
| Техническое зрение роботов | |||
| Под ред | |||
| ЯКУШЕНКОВА Ю.Г | |||
| - М.: изд | |||
| Машиностроение, 1990, с.168 | |||
| СПОСОБ (ВАРИАНТЫ) И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241958C9 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2003 |
|
RU2236707C1 |
| US 2005231418 A1, 20.10.2005 | |||
| Способ формирования рулона из длинномерного металлического материала | 1985 |
|
SU1329863A1 |

