Изобретение относится к автоматизированным приборам для контроля параметров движения транспортных средств (интенсивности, скорости, длины, магнитной массы по классам грузоподъемности) и может быть использовано для контроля технологических потоков металлических объектов в других областях.
Известно устройство для контроля движения транспорта (Патент США 5936551, кл. G08G 1/01, опубл. 10 авг. 1999 г.), которое содержит индуктивную петлю, охватывающую по периметру зону контроля и последовательно подключенные активный элемент генератора, формирователь импульсов, блок измерения частоты и блок формирования логического сигнала.
Однако известно, что при использовании устройства невозможно производить счет числа транспортных средств по классам грузоподъемности, а для оценки скорости транспортного средства и его длины требуется установка вдоль движения нескольких рамочных петель.
Известно устройство фирмы «Canoga» (США), содержащее микрозондовый индукционный датчик, соединенный через автогенератор высокочастотных колебаний с измерителем частоты высокочастотных колебаний, выход которого соединен с микроконтроллером классификации и счета числа проходящих транспортных средств (3М Россия, Москва, Смольная ул., 24/Д, Бизнес-центр «Меридиан», тел. (095) 784-74-74).
Недостатком известного устройства является невозможность измерения скорости движения и длины транспортного средства без использования дополнительного микрозонда, отнесенного на некоторое расстояние от первого вдоль полосы движения.
В основу предлагаемого технического решения положена задача исключения этого недостатка и разрешения технического противоречия между необходимостью классификации транспортных средств по грузоподъемности, скорости и длине и усложнением установки индукционных датчиков.
Поставленная задача решается тем, что устройство для контроля движения транспортных средств, содержащее первый микрозондовый индукционный датчик, соединенный с автогенератором высокочастотных колебаний, выход которого соединен через измеритель частоты высокочастотных колебаний с микроконтроллером классификации и счета числа проходящих транспортных средств, согласно изобретению дополнительно содержит второй микрозондовый индукционный датчик, усилитель сигнала и аналого-цифровой преобразователь, при этом второй микрозондовый индукционный датчик соединен через усилитель сигнала и аналого-цифровой преобразователь с первым входом делителя цифровых сигналов, который по второму входу соединен с выходом измерителя частоты высокочастотных колебаний, а выход делителя цифровых сигналов соединен с первым входом перемножителя цифровых сигналов, второй вход которого соединен через счетчик длительности сигнала автогенератора высокочастотных колебаний с выходом измерителя частоты высокочастотных колебаний, при этом выходы измерителя частоты высокочастотных колебаний, делителя цифровых сигналов и перемножителя цифровых сигналов соединены через микроконтроллер классификации и счета числа проходящих транспортных средств с устройством долговременной памяти параметров движения.
Принципиальным отличием заявляемого устройства от прототипа является включение дополнительного канала, содержащего второй микрозондовый индукционный датчик, на выходе которого при прохождении транспортного средства возникает сигнал U1, пропорциональный произведению магнитной массы транспортного средства на его скорость. Поскольку
где S1 - эффективная площадь первого микрозондового индукционного датчика, м2,
В - индукция магнитного поля, Тл,
t - время, с.
При этом
где k1 - коэффициент пропорциональности,
V - скорость движения транспортного средства, м/с,
М - магнитный поток, Вб.
На чертеже изображена структурная схема заявляемого устройства.
Устройство для контроля движения транспортных средств содержит первый микрозондовый индукционный датчик 1, соединенный через автогенератор 2 высокочастотных колебаний с измерителем 3 частоты высокочастотных колебаний, и второй микрозондовый индукционный датчик 4, соединенный через усилитель 5 сигнала с аналого-цифровым преобразователем 6, который соединен с первым входом делителя 7 цифровых сигналов. По второму входу делитель 7 цифровых сигналов соединен с выходом измерителя 3 частоты высокочастотных колебаний. Выход делителя 7 цифровых сигналов соединен с первым входом перемножителя 8 цифровых сигналов, второй вход которого подключен через счетчик 9 длительности сигнала автогенератора к выходу измерителя 3 частоты высокочастотных колебаний. Выходы измерителя 3 частоты высокочастотных колебаний, делителя 7 цифровых сигналов и перемножителя 8 цифровых сигналов подсоединены через микроконтроллер 10 классификации и счета числа проходящих транспортных средств к устройству 11 долговременной памяти параметров движения.
Заявляемое устройство работает следующим образом.
Микрозондовые индукционные датчики 1, 4 устанавливаются под дорожным полотном под каждой из полос движения. При прохождении транспортного средства над первым микрозондовым индукционным датчиком 1 изменяется его индуктивность, включенная в колебательный контур автогенератора 2 высокочастотных колебаний. Частота генерируемых высокочастотных колебаний автогенератора 2 высокочастотных колебаний изменяется пропорционально магнитной массе транспортного средства, то есть
fГ=k1M.
Частота генерируемых высокочастотных колебаний автогенератора 2 высокочастотных колебаний измеряется измерителем 3 частоты высокочастотных колебаний, а длительность аномального сигнала автогенератора 2 высокочастотных колебаний Δt измеряется счетчиком 9 длительности сигнала автогенератора. Результат оценки Δt поступает на первый вход перемножителя 8 цифровых сигналов. Сигнал со второго микрозондового индукционного датчика 4, пропорциональный первой производной от магнитной массы транспортного средства, поступает через усилитель 5 сигнала и аналого-цифровой преобразователь 6 на делитель 7 цифровых сигналов, на выходе которого получается цифровой сигнал, пропорциональный скорости V движения транспортного средства.
Это обуславливается эффектом дифференцирования, наведенного во второй микрозондовый индукционный датчик 4 сигнала U2 при прохождении транспортного средства:
где k2 - коэффициент пропорциональности,
S2 - эффективная площадь второго микрозондового индукционного датчика 4, м2.
После деления цифрового сигнала второго канала  на частоту колебаний автогенератора 2 высокочастотных колебаний, получаемую с выхода измерителя 3 частоты высокочастотных колебаний, на выходе делителя 7 цифровых сигналов выделяется сигнал, пропорциональный скорости движения транспортного средства:
на частоту колебаний автогенератора 2 высокочастотных колебаний, получаемую с выхода измерителя 3 частоты высокочастотных колебаний, на выходе делителя 7 цифровых сигналов выделяется сигнал, пропорциональный скорости движения транспортного средства:
В результате перемножения длительности аномального сигнала Δt с выхода счетчика 9 длительности сигнала автогенератора и сигнала, пропорционального скорости движения транспортного средства, с выхода делителя 7 цифровых сигналов на выход перемножителя 8 получается цифровой сигнал, пропорциональный длине L проходящего транспортного средства:
При подаче на вход микроконтроллера 10 классификации и счета числа проходящих транспортных средств всех полученных информационных параметров М, L, V его программное обеспечение производит распознавание транспортных средств по классу грузоподъемности. Например, легковые автомобили до 2 тонн, средние от 2 до 5 тонн, тяжелые до 10 тонн и сверхтяжелые свыше 10 тонн. Результаты регистрации параметров транспортных средств поступают на устройство 11 долговременной памяти параметров движения, накапливающее полученные данные по интенсивности загрузки автодороги по каждой из полос движения.
Таким образом, классификация транспортных средств производится с одной точки установки заявляемого устройства, что существенно упрощает его эксплуатацию и снижает цену изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2292085C1 |
| ИЗМЕРИТЕЛЬ ОБЪЕМА ЖИДКОСТИ, ТРАНСПОРТИРУЕМОЙ ПО НЕФТЕПРОВОДУ | 2006 |
|
RU2319933C2 |
| Измеритель @ -параметров | 1983 |
|
SU1140058A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ КОНВЕЙЕРНОЙ ЛЕНТЫ | 2001 |
|
RU2213355C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2006 |
|
RU2302584C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
| Электрохирургический генератор | 2024 |
|
RU2834838C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТРОПОЛИТЕНА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2425396C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2004 |
|
RU2258865C1 |
Изобретение относится к автоматизированным приборам для контроля параметров движения транспортных средств. Устройство для контроля движения транспортных средств содержит первый микрозондовый индукционный датчик (1), соединенный с автогенератором (2) высокочастотных колебаний, выход которого соединен через измеритель (3) частоты высокочастотных колебаний с микроконтроллером (10) классификации и счета числа проходящих транспортных средств. Устройство дополнительно содержит второй микрозондовый индукционный датчик (4), усилитель (5) сигнала и аналого-цифровой преобразователь (6). Второй микрозондовый индукционный датчик (4) соединен через усилитель (5) сигнала и аналого-цифровой преобразователь (6) с первым входом делителя (7) цифровых сигналов, который по второму входу соединен с выходом измерителя (3) частоты высокочастотных колебаний. Выход делителя (7) цифровых сигналов соединен с первым входом перемножителя (8) цифровых сигналов, второй вход которого соединен через счетчик (9) длительности сигнала автогенератора высокочастотных колебаний с выходом измерителя (3) частоты высокочастотных колебаний. Выходы измерителя (3) частоты высокочастотных колебаний, делителя (7) цифровых сигналов и перемножителя (8) цифровых сигналов соединены через микроконтроллер (10) классификации и счета числа проходящих транспортных средств с устройством (11) долговременной памяти параметров движения. Технический результат заключается в упрощении эксплуатации устройства. 1 ил.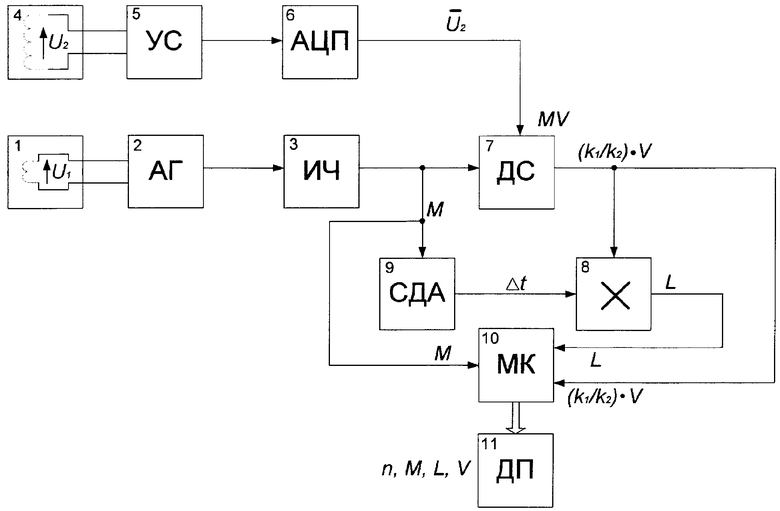
Устройство для контроля движения транспортных средств, содержащее первый микрозондовый индукционный датчик, соединенный с автогенератором высокочастотных колебаний, выход которого соединен через измеритель частоты высокочастотных колебаний с микроконтроллером классификации и счета числа проходящих транспортных средств, отличающееся тем, что оно дополнительно содержит второй микрозондовый индукционный датчик, усилитель сигнала и аналого-цифровой преобразователь, при этом второй микрозондовый индукционный датчик соединен через усилитель сигнала и аналого-цифровой преобразователь с первым входом делителя цифровых сигналов, который по второму входу соединен с выходом измерителя частоты высокочастотных колебаний, а выход делителя цифровых сигналов соединен с первым входом перемножителя цифровых сигналов, второй вход которого соединен через счетчик длительности сигнала автогенератора высокочастотных колебаний с выходом измерителя частоты высокочастотных колебаний, при этом выходы измерителя частоты высокочастотных колебаний, делителя цифровых сигналов и перемножителя цифровых сигналов соединены через микроконтроллер классификации и счета числа проходящих транспортных средств с устройством долговременной памяти параметров движения.
| US 6208268 В1, 27.03.2001 | |||
| JP 2002251693 А, 06.09.2002 | |||
| СПОСОБ ВЫРАБОТКИ КОМПОТА ИЗ АЙВЫ | 2010 |
|
RU2418515C1 |
| Устройство для контроля движения транспортных средств | 1978 |
|
SU752448A1 |

