Изобретение относится к ближней радиолокации и может использоваться в системах автономного управления движением взаимодействующих объектов для измерения на ограниченных расстояниях угла встречи сосредоточенной воздушной цели при помощи активного радиолокатора, расположенного на летательном аппарате.
Такие устройства для измерения угла встречи активного радиолокатора с сосредоточенной воздушной целью используются, например, для оценки взаимного угла встречи при сближении двух самолетов при дозаправке одного из них топливом; при управлении встречей космических объектов с целью стыковки, аварийной помощи, управлении механизмом самого объекта для достижения конечной цели - приведения в рабочее состояние стыковочных устройств, для запуска тормозных двигателей, выдачи команд в систему телеметрии и во многих других случаях [1]. Особенностью предлагаемого устройства является то, что в нем используется один генератор непрерывной радиочастоты, часть сигнала которого облучает слабонаправленной антенной поверхность сосредоточенной воздушной цели, находящейся в передней полусфере самолета и, тем самым, оценивается скорость сближения по частоте Доплера. Другая часть радиосигнала генератора формируется в виде коротких импульсов, направляемых той же антенной и в ту же переднюю полусферу летательного аппарата. Этими сигналами определяется дальность до наблюдаемого объекта. На вычислительное устройство в два фиксированных дискретных момента времени поступают одновременно сведения о текущих дальностях до сосредоточенного объекта наблюдения и скоростях сближения в виде частот Доплера. По этим данным вычисляется угол встречи активного радиолокатора с сосредоточенной воздушной целью.
Одно из существующих устройств измерения угла встречи летательного аппарата с сосредоточенной воздушной целью основывается на измерении разности времени прихода отраженного радиолокационного сигнала на три разнесенные остронаправленные антенны и при этом определяется, в каком из четырех квадрантов (переднем, заднем, правом или левом) находится контролируемый летательный аппарат. Подобная система определения угла положения летательного аппарата использована, например, в системе YG-1081 [2]. Такое устройство обладает рядом существенных недостатков, к которым в первую очередь относятся: сложность практической реализации, вызванная необходимостью разноса четырех антенных систем; малость измеряемых величин разности времени прихода сигнала накладывает жесткие требования на тракт передачи сигнала от антенны до измерительного устройства в отношении набега временных задержек и фиксации уровня начала отсчета. Во вторых такое устройство обладает низкой точностью измеряемых угловых параметров, так как знание квадранта, в котором находится второй летательный аппарат, является недостаточным для точной оценки угла встречи двух объектов.
Известны и другие устройства измерения угла встречи летательного аппарата с сосредоточенной воздушной целью, которые основаны на сканировании цели остронаправленной антенной системой [3, 4]. Основным недостатком всех этих и других подобных устройств является необходимость применения остронаправленных, а, стало быть, сложных антенных систем, что практически не позволяет их реализовать в конструкциях автономных устройств ограниченного объема, выполняющих функции управления движением взаимодействующих объектов на ограниченных расстояниях.
Наиболее близким устройством для измерения угла встречи активного радиолокатора с сосредоточенной воздушной целью по техническому построению является построение, описанное в [5]. Такое устройство содержит: генератор, циркулятор, приемопередающую антенну, смеситель, фильтр доплеровской частоты, регистратор скорости. Однако оно реализуемо только при отражении сигналов от распределенной (например, земной) поверхности, так как происходит определение углов подхода по изочастотным линиям частот Доплера, образующихся отраженными радиолокационными сигналами от протяженной (земной) поверхности.
Техническим результатом предлагаемого устройства измерения угла встречи активного радиолокатора с сосредоточенной воздушной целью является повышение точности измерения угла встречи активного радиолокатора с сосредоточенной воздушной целью и простота технической реализации измерений в ограниченных объемах автономных устройств управления движением взаимодействующих объектов на ограниченных расстояниях.
Технический результат устройства достигается тем, что в устройство, содержащее генератор, циркулятор, приемопередающую антенну, смеситель, фильтр доплеровской частоты, регистратор скорости, введены модулятор, первый усилитель мощности, второй усилитель мощности, сумматор, преобразователь частоты, детектор, регистратор дальности, тактовый генератор, первый регистр, второй регистр, третий регистр, четвертый регистр, счетчик импульсов, логический элемент «И-НЕ», логический элемент «НЕ», вычислитель.
При измерении угла встречи активного радиолокатора с сосредоточенной воздушной целью на ограниченных расстояниях принимается, что в период проводимых измерений из-за малого времени анализа (измерений) значения скоростей движения активного радиолокатора Vарл и сосредоточенной воздушной цели Vц являются постоянными величинами, так что относительная скорость «активный радиолокатор-цель» Vарл-ц также будет постоянной величиной, которую обозначим
V=Vарл-ц=const.
Примерное условие встречи активного радиолокатора с сосредоточенной воздушной целью в системе прямоугольных координат X, O, Y изображено на фиг.1. Движение наблюдаемого объекта относительно положения радиолокатора осуществляется прямолинейно, например, по траектории АБ (фиг.1).
Работа предлагаемого устройства заключается в следующем. В установленное исходное время первого отсчета, например, t1 положение радиолокатора находится в точке О, цель находится в точке Ц (t1) на расстоянии R1 от положения радиолокатора. К моменту времени второго отсчета, например, t2 цель с постоянной скоростью V переместится относительно положения радиолокатора в точку Ц (t2), находящуюся от радиолокатора на расстоянии R2. В точке Ц (t1) радиальная составляющая скорости V будет Vr1, а в точке Ц (t2) эта составляющая станет величиной Vr2. Так как при постоянной скорости V радиальные составляющие этой скорости связаны с углом α, образующемся радиус-вектором дальности положения радиолокатора R и направлением вектора скорости движения цели V, тогда из фиг.1 следует

т.к. V=const, то

С учетом теоремы синусов

имеем 
Обозначив 
из формулы (2) получим 
Из (1) следует 
Заменим cos2α=1-sin2α
Тогда с учетом формул (1)-(4) получим

С учетом формулы (3) получим
Так как радиальная составляющая скорости может быть определена через частоту Доплера по формуле [1]:

тогда искомый угол встречи активного радиолокатора с сосредоточенной воздушной целью α1 представится в конечном виде:
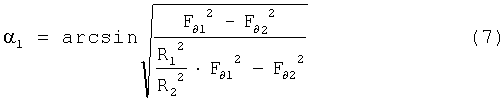
где R1 - величина первой дальности до наблюдаемого объекта,
R2 - величина второй дальности до наблюдаемого объекта,
F∂1 - первая частота Доплера,
F∂2 - вторая частота Доплера.
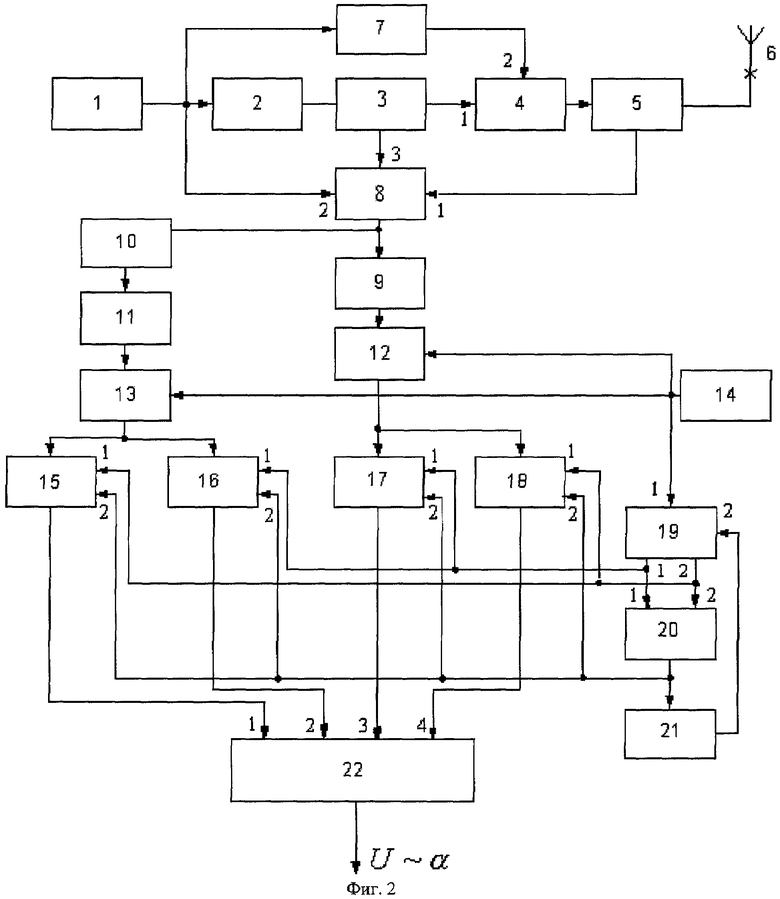
Структурная электрическая схема устройства для измерения угла встречи активного радиолокатора с сосредоточенной воздушной целью представлена на фиг.2.
Устройство для измерения угла встречи летательного аппарата с сосредоточенной воздушной целью содержит генератор 1, модулятор 2, первый усилитель мощности 3, сумматор 4, циркулятор 5, приемопередающую антенну 6, второй усилитель мощности 7, смеситель 8, фильтр доплеровской частоты 9, преобразователь частоты 10, детектор 11, регистратор скорости 12, регистратор дальности 13, тактовый генератор 14, первый регистр 15, второй регистр 16, третий регистр 17, четвертый регистр 18, счетчик импульсов 19, логический элемент «И-НЕ» 20, логический элемент «НЕ» 21, вычислитель 22, причем выход генератора 1 соединен со входами модулятора 2, второго усилителя мощности 7, смесителя 8, выход модулятора 2 соединен со входом первого усилителя мощности 3, выход которого соединен с первым входом сумматора 4, второй вход которого соединен с выходом второго усилителя мощности 7, выход сумматора 4 соединен со входом циркулятора 5, с которого сигнал поступает на приемопередающую антенну 6, выход циркулятора 5 соединен с первым сигнальным входом смесителя 8, третий вход которого соединен с выходом первого усилителя мощности 3, выход смесителя 8 соединен со входами фильтра доплеровских частот 9 и преобразователя частоты 10, выход фильтра доплеровских частот 9 соединен с сигнальным входом регистратора скорости 12, выход преобразователя частоты 10 соединен со входом детектора 11, выход которого соединен с первым входом регистратора дальности 13, выход которого соединен с информационными входами первого 15 и второго 16 регистров, выход регистратора скорости 12 соединен информационными входами третьего 17 и четвертого 18 регистров, выход тактового генератора 14 соединен с управляющими входами регистратора скорости 12, регистратора дальности 13 и счетным входом счетчика импульсов 19. Первый разрядный выход счетчика импульсов 19 соединен с первым входом логического элемента «И-НЕ» 20, с первым входом разрешения записи второго регистра 16 и первым входом разрешения записи третьего регистра 17, второй разрядный выход счетчика импульсов 19 соединен со вторым входом логического элемента «И-НЕ» 20, с первым входом разрешения записи первого регистра 15 и первым входом разрешения записи четвертого регистра 18, выход логического элемента «И-НЕ» 20 соединен со вторыми входами разрешения чтения первого 15, второго 16, третьего 17, четвертого 18 регистров и входом логического элемента «НЕ» 21, выход которого соединен со входом сброса счетчика импульсов 19, а информационные выходы первого 15, второго 16, третьего 17 и четвертого регистров 18 соответственно соединены с первым, вторым, третьим и четвертым входами вычислителя 22, на выходе которого сигнал пропорционален углу встречи активного радиолокатора с сосредоточенной воздушной целью.
Генератор 1 формирует непрерывный сигнал, который преобразовывается в импульсы в модуляторе 2, которые затем усиливаются в первом усилителе мощности 3 и поступают на первый вход сумматора 4, с выхода которого импульсный сигнал излучается слабонаправленной приемопередающей антенной 6 через циркулятор 5. От генератора 1 непрерывный сигнал поступает также на второй усилитель мощности 7, с выхода которого сигнал поступает на второй вход сумматора 4, с выхода которого непрерывный сигнал так же излучается слабонаправленной приемопередающей антенной 6 через циркулятор 5. Отраженный от наблюдаемого объекта (цели) сигнал поступает через приемопередающую антенну 6 и циркулятор 5 на сигнальный вход 1 смесителя 8. На первый гетеродинный вход 2 смесителя 8 сигнал поступает с выхода генератора 1, а на второй гетеродинный вход 3 смесителя 8 сигнал поступает с выхода усилителя мощности 3. С выхода смесителя 8 сигнал поступает на фильтр доплеровских частот 9, а оттуда он поступает на информационный вход регистратора скорости 12, с выхода которого сигнал, пропорциональный частоте Доплера F∂, поступает на информационный вход третьего регистра 17 и информационный вход четвертого регистра 18. При измерениях, в первый дискретный момент времени t1, определяемый тактовым генератором 14, информационный сигнал о первой текущей частоте Доплера F∂1 появляется только на выходе третьего регистра 17, а затем, во второй момент времени t2, определяемый тем же тактовым генератором 14, информационный сигнал о второй текущей частоте Доплера F∂2 появляется только на выходе четвертого регистра 18. С выхода смесителя 8 сигнал поступает также на преобразователь частоты 10, откуда преобразованный сигнал через детектор 11 поступает на информационный вход регистратора дальности 13, с выхода которого сигнал, пропорциональный дальности R, поступает на информационный вход первого регистра 15 и информационный вход второго регистра 16.
При измерениях, в первый дискретный момент времени t1, определяемый тактовым генератором 14, информационный сигнал о первой текущей дальности до наблюдаемого объекта R1 появляется только на выходе первого регистра 15, а затем, во второй момент времени t2, определяемый тем же тактовым генератором 14, информационный сигнал о второй текущей дальности до наблюдаемого объекта R2 появляется только на выходе четвертого регистра 18. Одновременное измерение в дискретные моменты времени частот Доплера и дальностей соответственно F∂1, R1 и F∂2, R2 осуществляется тем, что с тактового генератора 14 дискретный сигнал поступает на управляющие входы регистратора скорости 12, регистратора дальности 13 и счетный вход счетчика импульсов 19. Затем сигнал с первого разрядного выхода счетчика импульсов 19 поступает на первый вход разрешения записи второго регистра 16 и на первый вход разрешения записи третьего регистра 17. Сигнал со второго разрядного выхода счетчика импульсов 19 поступает на первый вход разрешения записи первого регистра 15 и на первый вход разрешения записи четвертого регистра 18. Сигнал с первого разрядного выхода счетчика импульсов 19 поступает на первый вход логического элемента «И-HE» 20, а сигнал со второго разрядного выхода счетчика импульсов 19 поступает на второй вход логического элемента «И-НЕ» 20. С выхода логического элемента «И-НЕ» 20 сигнал поступает на вход логического элемента «НЕ» 21 и вторые входы разрешения чтения первого регистра 15, второго регистра 16, третьего регистра 17 и четвертого регистра 18. Выход логического элемента «НЕ» 21 соединен со входом сброса счетчика импульсов 19. Информационные выходы первого регистра 15, второго регистра 16, третьего регистра 17, четвертого регистра 18 соответственно соединены с первым, вторым, третьим и четвертым входами вычислителя 22, на выходе которого сигнал пропорционален углу встречи активного радиолокатора с сосредоточенной воздушной целью.
В качестве элементов могут быть использованы стандартные микросхемы, например:
регистратор скорости 12, регистратор дальности 13 - типа 572ПВ3 [6],
первый 15, второй 16, третий 17 и четвертый 18 регистры - типа 133ИР1 [7],
логический элемент «И-НЕ» 20 - типа 133ЛА15 [7],
логический элемент «НЕ» 21 - типа 133ЛН1 [7],
вычислитель (процессор) 22 - типа 68НС12 [8, стр.58].
Предлагаемое устройство измерения угла встречи активного радиолокатора с сосредоточенной воздушной целью отличается от известного простотой технической реализации измерений в ограниченных объемах автономных устройств управления движением взаимодействующих объектов на ограниченных расстояниях.
Литература
1. Коган И.М. Ближняя радиолокация (теоретические основы). М.: Сов. радио. 1973. 272 с.
2. Индикатор сближений самолетов YG-1054 в публикациях:
1) The с band pulse beacon ranging system. - "Aircraft Engineering", 1972, v.44, №2.
2) System for collision avoidance thought - avionic observation of intruder danger (AVOID). "Information paper for seventh ICAO air Navigation conference". Montreal, Canada, 5-29 April, 1972.
3) Parkinson R.E. The case for time-frequency collision avoidance. - «ICAO Bull.», 1973, v.28, №11.
3. Радиолокационные устройства (теория и принципы построения). Васин В.В., Власов О.В., Григорин-Рябов В.В., Дудник П.И., Степанов Б.М., М.: Сов. радио, 1970, 680 с.
4. Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные доплеровские устройства и системы навигации летательных аппаратов. М.: Сов. радио, 1975, 432 с.
5. Патент RU 2111506 С, МКИ G 01 S 13/00 Устройство для дистанционного измерения отражательных свойств объектов сложной формы в СВЧ-диапазоне радиоволн. Авт. Бублик В.А., Жмуров В.А., Капкин А.П., Крайнев В.Р., Селезнев B.C., Троицкий В.Д.
6. Интегральные микросхемы: Микросхемы для аналого-цифрового преобразования и средств мультимедиа. Выпуск 1 - М.: ДОДЭКА, 1996 г., 384 с.
7. Аванесян Г.Р., Левшин В.П. Интегральные микросхемы ТТЛ, ТТЛШ: Справочник. - М.: Машиностроение, 1993. - 256 с.
8. Шагурин И., Белецкий В. Микроконтроллеры, интегрированные процессоры и гибридные DSP компании Freescale Semiconductor (SPS-Motorola) // Электронные компоненты, №7, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО АВТОНОМНОЙ РАДИОЛОКАЦИОННОЙ САМОКОРРЕКЦИИ ПРОМАХА ПРИ ВСТРЕЧЕ МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ОБЪЕКТОМ НА ЗАКЛЮЧИТЕЛЬНОМ УЧАСТКЕ ТРАЕКТОРИИ ПОЛЕТА | 2012 |
|
RU2533660C2 |
| АВТОНОМНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2013 |
|
RU2533659C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВСТРЕЧИ АКТИВНОГО РАДИОЛОКАТОРА С СОСРЕДОТОЧЕННОЙ ВОЗДУШНОЙ ЦЕЛЬЮ | 2005 |
|
RU2290661C2 |
| Способ измерения параметров движения объекта активным локатором | 2020 |
|
RU2759199C1 |
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ МАЛЫХ ВЫСОТ | 2010 |
|
RU2449310C2 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2230338C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| Малогабаритная многорежимная бортовая радиолокационная система для оснащения перспективных беспилотных и вертолетных систем | 2018 |
|
RU2696274C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| УСТРОЙСТВО САМОНАВЕДЕНИЯ | 2008 |
|
RU2392575C2 |
Изобретение относится к ближней радиолокации и может использоваться в системах автономного управления движением взаимодействующих объектов для измерения на ограниченных расстояниях угла встречи сосредоточенной воздушной цели при помощи активного радиолокатора, расположенного на летательном аппарате. Особенностью предлагаемого устройства является то, что в нем используется один генератор непрерывной радиочастоты, часть сигнала которого облучает слабонаправленной антенной поверхность сосредоточенной воздушной цели, находящейся в передней полусфере самолета и, тем самым, оценивается скорость сближения по частоте Доплера. Другая часть радиосигнала генератора формируется в виде коротких импульсов, направляемых той же антенной и в ту же переднюю полусферу летательного аппарата. Этими сигналами определяется дальность до наблюдаемого объекта. На вычислительное устройство в два фиксированных дискретных момента времени поступают одновременно сведения о текущих дальностях до сосредоточенного объекта наблюдения и скоростях сближения в виде частот Доплера. По этим данным вычисляется угол встречи активного радиолокатора с сосредоточенной воздушной целью. Достигаемый технический результат устройства заключается в повышении точности измерения. 2 ил.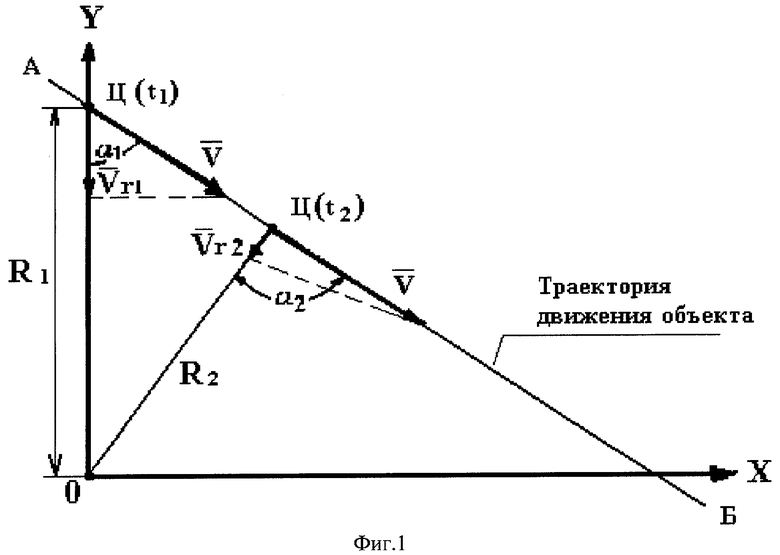
Устройство измерения угла встречи летательного аппарата с сосредоточенной воздушной целью, содержащее генератор, циркулятор, приемопередающую антенну, смеситель, фильтр доплеровской частоты, регистратор скорости, отличающееся тем, что в него введены модулятор, первый усилитель мощности, второй усилитель мощности, сумматор, преобразователь частоты, детектор, регистратор дальности, тактовый генератор, первый регистр, второй регистр, третий регистр, четвертый регистр, счетчик импульсов, логический элемент «И-НЕ», логический элемент «НЕ», вычислитель, причем выход генератора соединен со входами модулятора, второго усилителя мощности, смесителя, выход модулятора соединен со входом первого усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом второго усилителя мощности, выход сумматора соединен со входом циркулятора, с которого сигнал поступает на приемопередающую антенну, выход циркулятора соединен с первым сигнальным входом смесителя, третий вход которого соединен с выходом первого усилителя мощности, выход смесителя соединен со входами фильтра доплеровских частот и преобразователя частоты, выход фильтра доплеровских частот соединен с сигнальным входом регистратора скорости, выход преобразователя частоты соединен со входом детектора, выход которого соединен с первым входом регистратора дальности, выход которого соединен с информационными входами первого и второго регистров, выход регистратора скорости соединен с информационными входами третьего и четвертого регистров, выход тактового генератора соединен с управляющими входами регистратора скорости, регистратора дальности и счетным входом счетчика импульсов, первый разрядный выход счетчика импульсов соединен с первым входом логического элемента «И-НЕ», с первым входом разрешения записи второго регистра и первым входом разрешения записи третьего регистра, второй разрядный выход счетчика импульсов соединен со вторым входом логического элемента «И-НЕ», с первым входом разрешения записи первого регистра и первым входом разрешения записи четвертого регистра, выход логического элемента «И-НЕ» соединен со вторыми входами разрешения чтения первого, второго, третьего, четвертого регистров и входом логического элемента «НЕ», выход которого соединен со входом сброса счетчика импульсов, а информационные выходы первого, второго, третьего и четвертого регистров соответственно соединены с первым, вторым, третьим и четвертым входами вычислителя, на выходе которого сигнал пропорционален углу встречи активного радиолокатора с сосредоточенной воздушной целью.
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
| СИСТЕМА НАВЕДЕНИЯ ОБЪЕКТА ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2229670C1 |
| СПОСОБ СУШКИ МАКАРОННЫХ ИЗДЕЛИЙ | 1973 |
|
SU436215A1 |
| СПОСОБ ПРОИЗВОДСТВА ДЕСЕРТА | 2013 |
|
RU2517818C1 |
| US 5347910 A, 20.09.1994. | |||

