Изобретение относится к ближней радио- и гидролокации и может использоваться в системах автономного управления движением взаимодействующих объектов для вычисления на ограниченных расстояниях параметров движения объекта - путевой скорости, курсового параметра и угла встречи движущегося или неподвижного локатора с движущимся объектом.
Предлагаемый способ может использоваться для определения параметров движения объекта однопозиционным локатором со слабонаправленной или ненаправленной антенной при решении задач встречи с движущимся объектом в устройствах автономного управления движением взаимодействующих объектов на ограниченных расстояниях, при контроле пространства с целью ранжирования движущихся водных, подводных и наземных объектов.
Известен способ однопозиционной радиолокации подвижных объектов на дорожной Сети (см. 1. патент РФ на изобретение №2524482, МПК G01S 5/00, опубл. 27.07.2014.), заключающийся в измерении угла прихода электромагнитной волны (пеленга) от объекта из одного измерительного пункта, положение которого известно, измерении на объекте скорости его перемещения вдоль элемента дорожной сети, кодировании сигнала, пропорционального измеренной скорости, передаче полученного кода по радиоканалу передачи данных на измерительный пункт, декодировании полученного значения измеренной скорости, повторном через известный интервал времени измерении пеленга объекта, определении длины пути, пройденного за известный интервал времени, определении значений натурального параметра, соответствующих точкам пересечения линии положения для первого измеренного пеленга и элементов дорожной сети, определении для каждого из этих элементов возможных значений пеленгов, соответствующих перемещению объекта на некоторое расстояние, определении из условия минимального рассогласования между ними и повторно измеренным пеленгом номера элемента дорожной сети, на котором находится объект, определении координат местоположения объекта как координат точки пересечения линии положения, соответствующей измеренному пеленгу и определенного элемента дорожной сети.
Для обеспечения необходимых точностных характеристик измерений в данном способе требуется использование антенной системы с узкой диаграммой направленности, что приводит к существенному увеличению массогабаритных параметров системы.
Известен латерационный способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети (см. 2. патент РФ на изобретение №2703258, МПК G01S 5/00, опубл. 16.10.2019), заключающийся в излучении в моменты времени t и t+Δt сигналов, передаваемых источником радиосигнала и содержащих его опознавательный код, одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети, на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют, и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, источник радиосигнала в процессе перемещения измеряет длину пройденного пути, сигнал, пропорциональный длине Δе пройденного за время Δt пути, кодируют, и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение пройденного за время Δt пути, отличающийся тем, что из одного измерительного пункта, положение которого известно, измеряют задержки прихода электромагнитных волн по сигналам, излучаемым источником радиосигнала в моменты времени t и t+Δt, известные на измерительном пункте, по измеренным задержкам определяют измеренные дальности до источника радиосигнала, определяют те элементы дорожной сети, которые пересекают линию положения, соответствующую первой измеренной дальности, или касаются ее, по параметрическим моделям дальностей, заданным для этих элементов значений в функции натурального параметра, определяют значения натурального параметра, соответствующие точкам пересечения линии положения для дальности и элементов дорожной сети, для каждого из этих элементов рассчитывают значения дальностей, соответствующие перемещению подвижного источника радиосигнала на некоторое расстояние, и из условия минимального рассогласования между ними и измеренной дальностью на второй момент измерения определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, по параметрическим моделям угла наклона касательных к элементам дорожной сети, заданным в функции натурального параметра, и значениям натурального параметра, соответствующим точкам пересечения линии положения для измеренной дальности на момент первого измерения и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона, и из условия минимального рассогласования между ними и измеренным углам определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями дальностей и повторно измеренной дальностью, определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренной дальности на момент первого или второго измерения, и элемента дорожной сети, на котором находится подвижный источник радиосигнала.
Данный способ требует априорного знания о структуре дорожной сети, необходимость вычисления непосредственно на объекте пройденного источником радиосигнала пути в определенные моменты времени, а также и вычисление утла наклона касательной к элементу дорожной сети и трансляция этих данных на измерительный пункт, что требует постановки на объект дополнительной аппаратуры.
Также известен способ измерения угла встречи активного радиолокатора летательного аппарата с сосредоточенной воздушной целью (см. 3. патент РФ на изобретение №2290661. МПК G01S 13/02, опубл. 27.12.2006). Данный способ, выбранный в качестве прототипа, основан на излучении радиосигнала, приеме отраженного радиосигнала, сигнала от поверхности сосредоточенной воздушной цели и измерении между ними дальности и частот Доплера, при этом слабонаправленную антенну летательного аппарата устанавливают относительно строительной оси в переднюю полусферу, устанавливают исходное отсчетное время, в первый дискретный период времени регистрируют одновременно первую дальность до наблюдаемого объекта и первую частоту Доплера, во второй дискретный период времени регистрируют одновременно вторую дальность до наблюдаемого объекта и вторую частоту Доплера, вычисляют отношение первой ко второй дальности, а затем рассчитывают угол встречи активного радиолокатора летательного аппарата с воздушной целью.
В данном способе - прототипе возможно измерение только одного параметра сближения с целью - угла встречи α радиолокатора с движущейся целью, что ограничивает функциональные возможности способа, кроме того при реализации способа требуется наличие двух каналов обработки - дальномерного и доплеровского, что усложняет и удорожает систему, реализующую данный способ.
Технической проблемой является невозможность измерения ряда параметров движения цели активным радиолокатором и сложность реализации способа измерения параметров движения цели.
Техническим результатом предлагаемого способа измерения параметров движения цели активным локатором является расширение функциональных возможностей способа путем расширения диапазона измеряемых параметров движения цели, а также упрощение реализации способа путем использования только дальномерных измерений.
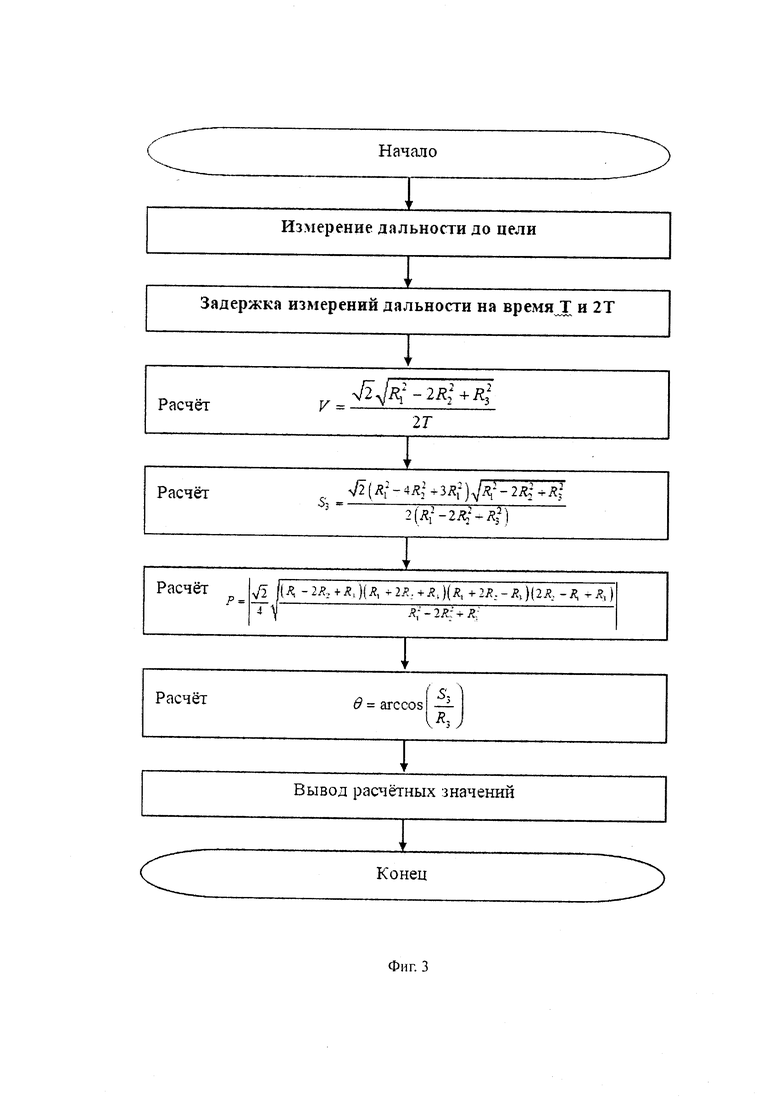
Достижение указанного технического результата обеспечивается в предлагаемом способе тем, что производят излучение импульсного сигнала, прием отраженного эхосигнала от поверхности движущегося объекта, измеряют дальность до движущегося объекта, устанавливают исходное отсчетное время Т, регистрируют в первый дискретный период первую дальность R1 до наблюдаемого объекта, регистрируют во второй дискретный период времени вторую дальность R2 до наблюдаемого объекта, согласно изобретению в третий дискретный период времени дополнительно измеряют дальность R3 до движущегося объекта и затем вычисляют искомые параметры движения объекта по формулам:
скорость сближения движущегося объекта и локатора

курсовой параметр Р

угол встречи α локатора с движущимся объектом

где параметр S3 на момент третьего измерения есть

Покажем влияние отличительных признаков на достижение технического результата.
Введение в предлагаемый способ в третий дискретный период дополнительного измерения дальности R3 до движущегося объекта и исключение процедур измерения доплеровской частоты с последующим вычислением искомых параметров движения объекта по предлагаемым формулам позволяет расширить применимость способа в задачах сверхближней радиолокации и упростить его реализацию.
Сущность изобретения раскрывается с помощью фигур 1-6.
на фиг. 1 приведена геометрическая интерпретация определения искомых параметров движения объекта;
на фиг. 2 приведен пример устройства для реализации предлагаемого способа;
на фиг. 3 блок-схема алгоритма, поясняющего основные этапы реализации способа;
на фиг. 4 приведены графики, отражающие среднеквадратические ошибки (СКО) определения скорости V сближения объекта и локатора;
на фиг. 5 - приведены графики, отражающие СКО определения курсового параметра Р;
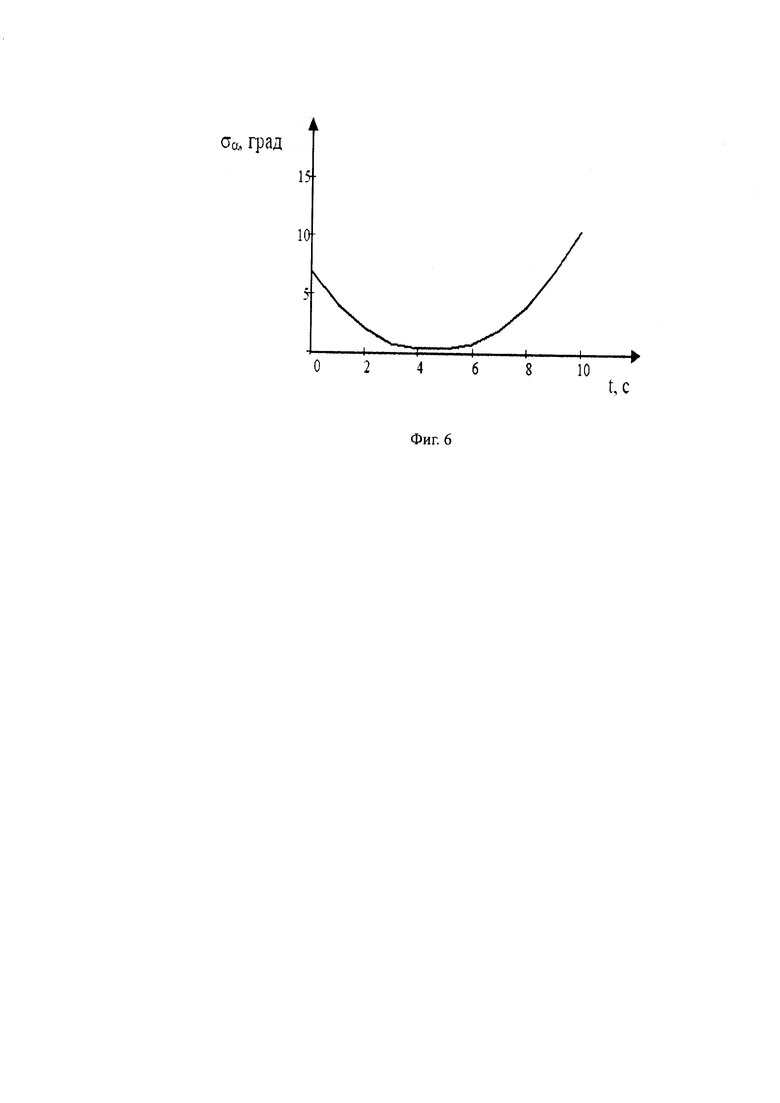
на фиг. 6 - приведены графики, отражающие СКО определения угла α встречи локатора с объектом.
Осуществление предлагаемого способа можно пояснить следующим образом.
При измерении параметров объекта полагается, что объект и локатор движутся равномерно и прямолинейно. В установленное исходное время первого отсчета (фиг. 1), например t1, локатор находится в точке О, объект находится в точке Ц (t1) на расстоянии R1 от локатора, к моменту времени второго отсчета t2, объект с постоянной скоростью V переместится относительно положения локатора в точку Ц (t2), находящуюся от локатора на расстоянии R2, к моменту времени третьего отсчета t3, цель с постоянной скоростью V переместится относительно положения локатора в точку Ц (t3), находящуюся от локатора на расстоянии R3.
Выразим значения дальности до цели, измеряемые через фиксированный интервал времени Т (см. фиг. 1), как:

где: S1, S2, S3, - параметры в моменты времени t1, t2 и t3 соответственно.
Учитывая, что S1 = S3+2VT, S2=S3+VT и подставляя эти значения в (5), после несложных преобразований, получим выражения для
скорости сближения (удаления) объекта с локатором

курсового параметра

угла встречи с объектом

и параметра S3

В формулах (6) и (9) ставится знак «плюс» если выполняется условие R1>R2>R3 и «минус» если R1<R2<R3.
Ниже представлен пример реализации способа с использованием радиолокатора, функциональная схема которого приведена на фиг. 2, где обозначено:
1 - генератор;
2 - модулятор;
3 - первый усилитель мощности; 4-циркулятор;
5 - приемопередающая антенна;
6 - второй усилитель мощности;
7 - смеситель;
8 - преобразователь частоты;
9 - детектор;
10 - регистратор дальности;
11 -тактовый генератор;
12 - цифровая линия задержки;
13 - вычислительное устройство.
При этом выход генератора 1 подключен к первому входу смесителя 7 и входу модулятора 2, выход которого соединен со входом усилителя 3 мощности, выход которого подключен ко входу циркулятора 4, связанного одним выходом с приемопередающей антенной 5, а другим выходом - со входом второго усилителя 6 мощности, выходом подключенного ко второму входу смесителя 7, выходом соединенного со входом преобразователя 8 частоты, выход которого подключен ко входу детектора 9, выходом связанного с первым входом регистратора 10 дальности, второй вход которого соединен с выходом тактового генератора 11, подключенным также к четвертому входу вычислительного устройства 13, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами цифровой линии 12 задержки, первый вход которой подключен к выходу регистратора 10 дальности, а второй вход - ко второму выходу вычислительного устройства 13, первый выход которого является выходом устройства для реализации предлагаемого способа.
Рассмотрим реализацию предлагаемого способа в устройстве, приведенном на фиг. 2.
Генератор 1 формирует непрерывный сигнал, который преобразуется в импульсы в модуляторе 2, затем усиливается в усилителе 3 мощности и через циркулятор 4 излучается слабонаправленной приемопередающей антенной 5. Отраженный от цели сигнал принимается приемопередающей антенной 5 и через циркулятор 4, второй усилитель 6 мощности поступает на второй вход смесителя 7, на первый вход которого сигнал поступает с выхода генератора 1. С выхода смесителя 7 сигнал поступает на преобразователь 8 частоты и через детектор 9 поступает на первый вход регистратора 10 дальности, на второй вход которого поступают тактовые импульсы с тактового генератора 11. С выхода регистратора 10 дальности сигнал, пропорциональный дальности до цели, поступает на вход цифровой линии 12 задержки, с первого выхода которой снимается сигнал, пропорциональный первой дальности до цели - R1, со второго выхода снимается сигнал, пропорциональный второй дальности до цели - R2, с третьего выхода снимается сигнал, пропорциональный третьей дальности до цели - R3. Данные сигналы подаются соответственно на первый, второй и третий входы вычислительного устройства 13, на четвертый вход которого подаются тактовые импульсы с тактового генератора 11, а с первого выхода вычислительного устройства 13 на второй вход цифровой линии 12 задержки подается сигнал для изменения времени Т, со второго выхода вычислительного устройства 13 считываются значения путевой скорости цели, рассчитанной по формуле (6), с третьего выхода вычислительного устройства 13 считываются значения путевой дальности до объекта, рассчитанной по формуле (7), с четвертого выхода вычислительного устройства 13 считываются значения курсового параметра Р объекта, рассчитанные по формуле (8), с пятого выхода вычислительного устройства 13 считываются значения угла α встречи с объектом, рассчитанные по формуле (9).
Предложенный способ может использоваться для определения параметров движения объекта однопозиционной РЛС со слабонаправленной или ненаправленной антенной при решении задач встречи локатора с движущимся объектом в устройствах автономного управления движением взаимодействующих объектов на ограниченных расстояниях, при контроле пространства с целью ранжирования движущихся водных, подводных и наземных объектов и отличается от известного способа большим числом измеряемых параметров при более простотой технической реализации способа.
На фиг. 4-6 приведены графики СКО определяемых параметров, полученные при следующих исходных данных: скорость V движения объекта - 200 м/с, курсовой параметр Р=100 м, начальное значение параметра S1=1000 м, период съема данных Т=1 сек, СКО измерения дальности 0.5 м.
На фиг. 4 приведены графики, отражающие среднеквадратические ошибки (СКО) определения скорости V сближения объекта и локатора.
На фиг. 5 - приведены графики, отражающие СКО определения курсового параметра Р.
На фиг. 6 - приведены графики, отражающие СКО определения угла α встречи локатора с объектом.
Как показали исследования точность оценивания искомых параметров зависит как от ошибок измерений дальности R, периода Т съема данных измерений и пространственного положения объекта относительно локатора. В процессе вычисления искомых величин можно управлять процессом измерений варьируя величиной Т и/или отбирая определенным образом для вычислений отсчеты дальности R через определенные временные интервалы.
Устройство для определения параметров движения объекта может быть выполнено на типовых элементах радио и гидролокационных станций и вычислительной техники.
Элементы локатора, такие как: генератор, модулятор, первый усилитель мощности, циркулятор, приемопередающая антенна, второй усилитель мощности, смеситель, преобразователь частоты и детектор могут быть выполнены на типовых элементах и узлах, как в прототипе, либо на элементах, например, РЛС, рассмотренных в (см. 4. Васин В.В., Степанов Б.М. Справочник задачник по радиолокации. М., Сов. Радио, 1977, 320) и приведенных на странице 49.
Регистратор дальности может быть выполнен как в (см. 5. Бакулев П.А., Радиолокационные системы. Учебник для вузов, - М. Радиотехника, 2004, 320 с.) и приведенный на странице 240 рисунок 10.14.
Вычислительное устройство и цифровая линия задержки могут быть реализованы на программируемых логических интегральных схемах, например как в (см. 6. Стешенко В.Б. ПЛИС фирмы ALTERA: проектирование устройств обработки сигналов. - М.: ДОДЭКА, 2000. 128 с.).


Изобретение относится к ближней радио и гидролокации и может использоваться в системах автономного управления движением взаимодействующих объектов для вычисления на ограниченных расстояниях параметров движения объекта - путевой скорости, курсового параметра и угла встречи движущегося или неподвижного локатора с движущимся объектом. Техническим результатом изобретения является расширение диапазона измеряемых параметров движения цели, а также упрощение реализации способа путем использования только дальномерных измерений. В заявленном способе излучают импульсный сигнал, принимают отраженный эхосигнал от поверхности движущегося объекта, измеряют между ними дальности, устанавливают исходное отсчетное время Т, регистрируют в первый, второй и третий дискретные периоды соответственно первую дальность R1, вторую дальность R2 и третью дальность R3 до наблюдаемого движущегося объекта. Затем вычисляют искомые параметры движения объекта: скорость сближения движущегося объекта и локатора, курсовой параметр, угол встречи локатора с движущимся объектом. 6 ил.
Способ измерения параметров движения объекта активным локатором, основанный на излучении импульсного сигнала, приеме отраженного эхосигнала от поверхности движущегося объекта, измерении между ними дальности, установлении исходного отсчетного времени Т, регистрации в первый дискретный период первой дальности R1 до наблюдаемого объекта, регистрации во второй дискретный период времени второй дальности R2 до наблюдаемого объекта, отличающийся тем, что в третий дискретный период времени дополнительно измеряют дальность R3 до движущегося объекта и затем вычисляют искомые параметры движения объекта по формулам: скорость сближения движущегося объекта и локатора

курсовой параметр Р

угол встречи α локатора с движущимся объектом
где параметр S3 на момент третьего измерения есть
 .
.

