Изобретение относится к универсальному, спортивному тренировочному устройству для развития и укрепления мускулатуры и суставов в домашних условиях и в спортивных залах.
Широко известны тренажеры, в которых для укрепления и развития мускулатуры используются вращательные движения - наиболее характерные для суставов и мускулатуры тела человека.
К таким тренажерам относятся, например, различные велотренажеры для тренировки ног (например, патенты РСТ WO 03/070549, А 63 В 21/00, 21.02.2002; WO 02/056972, А 63 В 21/00, 18.01.2002; US 5299992). Известны тренажеры, конструкция которых предусматривает возможность совершения вращательных движений не только ногами, но и руками (например, патенты US 4786050, А 63 В 21/00, 1988; RU 2114666, А 63 В 22/12, 19.07.1993).
Известен тренажер, в котором предусмотрены вращательные движения только руками (патент РСТ WO 02/30517, А 63 В 21/00, 18.04.2002) или являющийся наиболее близким аналогом данного изобретения (патент РСТ WO 2004/004842 А1, А 63 В 22/06, 03.07.2002), содержащий несущую конструкцию, на которой установлен механизм для создания нагрузки связанный с одной или двумя кривошипными рукоятками.
Недостатком известных устройств, и, в частности, наиболее близкого аналога, является то, что вал, на котором закреплена рукоятка или педали, имеет только одну, вращательную, степень свободы и не имеет, либо имеет в незначительном диапазоне, поступательные степени свободы, например возможность перестановки по высоте, что существенно ограничивает диапазон возможных упражнений.
Техническим результатом предлагаемого изобретения является повышение эффективности тренировки мышц и расширение разнообразия выполняемых упражнений, за счет увеличения количества степеней свободы вала кривошипной рукоятки до 3-6, так чтобы вал имел три вращательные степени свободы, одну вокруг собственной оси и две, обеспечивающие ориентацию оси вращения вала, вокруг осей вращения, непараллельных, и, предпочтительно, взаимно ортогональных, оси вращения вала, а также от одной до трех степеней свободы для изменения пространственного положения вала с кривошипной рукояткой.
Данный технический результат достигается за счет того, что несущая конструкция тренажера, на которой установлен, по меньшей мере, один вал с кривошипной рукояткой, кинематически связанный с механизмом для создания нагрузки, выполнена в виде, по меньшей мере, одной, незамкнутой кинематической цепи, состоящей из двух функциональных частей, передвижной и ориентирующей, или только одной, ориентирующей части. Передвижная часть задает положение или, перемещение в пространстве, ориентирующей части, которая ориентирует ось вращения вала кривошипной рукоятки. Ориентирующая часть обеспечивает валу три степени свободы, и выполнена в виде трехзвенной кинематической цепи, состоящей из двух вращательных кинематических пар 5 класса, оси вращения которых не параллельны и, предпочтительно, взаимно ортогональны оси вращения вала, первое звено выполнено в виде неподвижной стойки или входит в состав передвижной части, а на последнее установлен вал кривошипной рукоятки. Перемещающая часть выполнена в виде нескольких кинематических пар, обеспечивающих в совокупности от одной до трех степеней свободы для изменения пространственного положения ориентирующей части, причем положение всех подвижных звеньев несущей конструкции регулируется, с возможностью фиксации, а вал кривошипной рукоятки имеет, в общей сложности, от трех до шести степеней свободы.
Данный технический результат достигается в том случае, когда несущая конструкция тренажера выполнена в виде, по меньшей мере, одной незамкнутой кинематической цепи, состоящей из трех или четырех кинематических пар. В кинематическую цепь из трех пар входит одна поступательно-вращательная кинематическая пара 4 класса, которая задает положение в пространстве двух следующих вращательных кинематических пар 5 класса обеспечивающих ориентацию оси вращения вала. Первое звено представляет собой неподвижную, предпочтительно вертикальную стойку, второе звено расположено под углом 45-90 градусов к первому и имеет одну поступательную степень свободы вдоль оси первого звена и одну вращательную вокруг этой оси, третье и четвертое имеют по одной, вращательной, степени свободы и обеспечивают ориентацию оси вращения вала с кривошипной рукояткой, на четвертое звено установлен вал с кривошипной рукояткой, имеющий в совокупности 5 степеней свободы. В кинематическую цепь из четырех кинематических пар входит одна поступательная кинематическая пара 5 класса и три вращательных кинематических пары 5 класса, при этом первые две, поступательная и вращательная кинематические пары 5 класса, задают положение в пространстве двух следующих вращательных кинематических пар 5 класса, обеспечивающих ориентацию оси вращения вала. Первое звено представляет неподвижную, предпочтительно вертикальную, стойку, второе звено имеет одну поступательную степень свободы вдоль оси первого звена, третье имеет одну вращательную степень свободы, причем плоскость его вращения расположена под углом 45-90 градусов к первому звену, четвертое и пятое имеют по одной вращательной степени свободы и обеспечивают ориентацию оси вращения вала с кривошипной рукояткой, на пятое звено установлен вал с кривошипной рукояткой, имеющий в совокупности 5 степеней свободы. Для каждой из кинематических пар положение подвижных звеньев регулируется с возможностью фиксации, а длина подвижных звеньев должна быть подобрана так, чтобы при вертикальном расположении оси вращения вала, кривошипная рукоятка не задевала во время вращения вертикальную стойку.
Технический результат достигается и в том случае если несущая конструкция тренажера выполнена в виде, по меньшей мере, одной, незамкнутой кинематической цепи, состоящей из четырех или пяти вращательных кинематических пар 5 класса. В кинематической цепи из четырех пар первые две вращательные кинематические пары 5 класса задают положение в пространстве двух следующих вращательных кинематических пар 5 класса, обеспечивающих ориентацию оси вращения вала. Первое звено представляет неподвижную, предпочтительно вертикальную стойку или неподвижное основание, второе звено имеет одну вращательную степень свободы, относительно первого звена, третье звено, в виде удлиненного стержня, имеет одну вращательную степень свободы в плоскости, перпендикулярной, плоскости вращения второго звена, четвертое и пятое имеют по одной вращательной степени свободы и обеспечивают ориентацию оси вращения вала с кривошипной рукояткой. На пятое звено установлен вал с кривошипной рукояткой, имеющий в совокупности 5 степеней свободы. В кинематической цепи из пяти пар первые три вращательные кинематические пары 5 класса задают положение в пространстве двух последующих вращательных кинематических пар 5 класса, обеспечивающих ориентацию оси вращения вала. Первое неподвижное звено представляет собой основание, второе звено, в виде удлиненного стержня, имеет одну вращательную степень свободы, третье звено имеет одну вращательную степень свободы в плоскости, предпочтительно, перпендикулярной, плоскости вращения второго звена, четвертое, предпочтительно, удлиненное, имеет одну вращательную степень свободы в плоскости, предпочтительно, перпендикулярной, плоскости вращения третьего звена, пятое и шестое имеют по одной вращательной степени свободы и обеспечивают ориентацию оси вращения вала с кривошипной рукояткой. На шестое звено установлен вал с кривошипной рукояткой, имеющий в совокупности 6 степеней свободы. Для каждой из кинематических пар положение подвижных звеньев регулируется, с возможностью фиксации, а длина подвижных звеньев должна быть подобрана так, чтобы при вертикальном расположении оси вращения вала кривошипная рукоятка не задевала во время вращения вертикальную стойку.
Данный технический результат достигается также в том случае, когда ориентирующая часть с установленным на ней валом кривошипной рукоятки и при необходимости перемещающая часть используется в составе других тренажеров.
Размещенный в корпусе механизм для создания нагрузки, нагружающее устройство которого связано с валом кривошипной рукоятки, может быть установлен на последнее звено несущей конструкции, что упрощает конструкцию и позволяет использовать различные кинематические схемы без привязки к механизму нагрузки.
Также возможно выполнение, по меньшей мере, одного подвижного звена телескопическим, с возможностью фиксации одной части звена относительно другой.
Сущность изобретения поясняется чертежами. Показаны два варианта выполнения конструкции тренажера.
В первом варианте фиг.1 тренажер имеет вертикальные стойки 1, закрепленные в подвижном или неподвижном основании 2 или прикрепленные к стене, или к потолку, или в виде распорок между полом и потолком, и горизонтальные звенья 3, установленные на вертикальных стойках. При этом горизонтальные звенья выполнены с возможностью поступательного и вращательного движения относительно стойки и имеют фиксаторы положения по высоте и угла поворота. Перемещение по высоте может производиться, например, посредством механизма, включающего зубчатую рейку, размещенную на вертикальной стойке, и зубчатого колеса и/или червяка на горизонтальном звене, а изменение и фиксация угла поворота посредством, например, червячного или глобоидного механизма или запирающего шарнира. На конце каждого горизонтального звена установлена шарнирная пара 4, первая и вторая вращательные кинематические пары которой, посредством фиксаторов, обеспечивают необходимую ориентацию оси вращения вала 5 кривошипной рукоятки 6. На последнем звене несущей конструкции может быть установлен размещенный в корпусе механизм для создания нагрузки 7, нагружающее устройство которого связано с валом кривошипной рукоятки. В другом варианте общий для рукояток механизм создания нагрузки 8 закреплен между вертикальных стоек и перемещается в вертикальной плоскости вместе с горизонтальными звеньями, а вращающий момент от вала, к которому крепится кривошипная рукоятка, передается на механизм для создания нагрузки через гибкий вал или шарнирное соединение. При значительной массе механизма нагрузки и связанных с ним горизонтальных звеньев тренажер может содержать противовес или систему противовесов, связанных посредством системы тросов и блоков с механизмом нагрузки и горизонтальных звеньев для уравновешивания. Возможно, использование двух горизонтальных звеньев, установленных на каждой из вертикальных стоек, для того, чтобы одновременно можно было выполнять упражнения для рук и ног. Также тренажер может выполняться с одной стойкой, для большей компактности, или с четырьмя и более в том случае, если тренажер предназначен для использования в тренажерных залах.
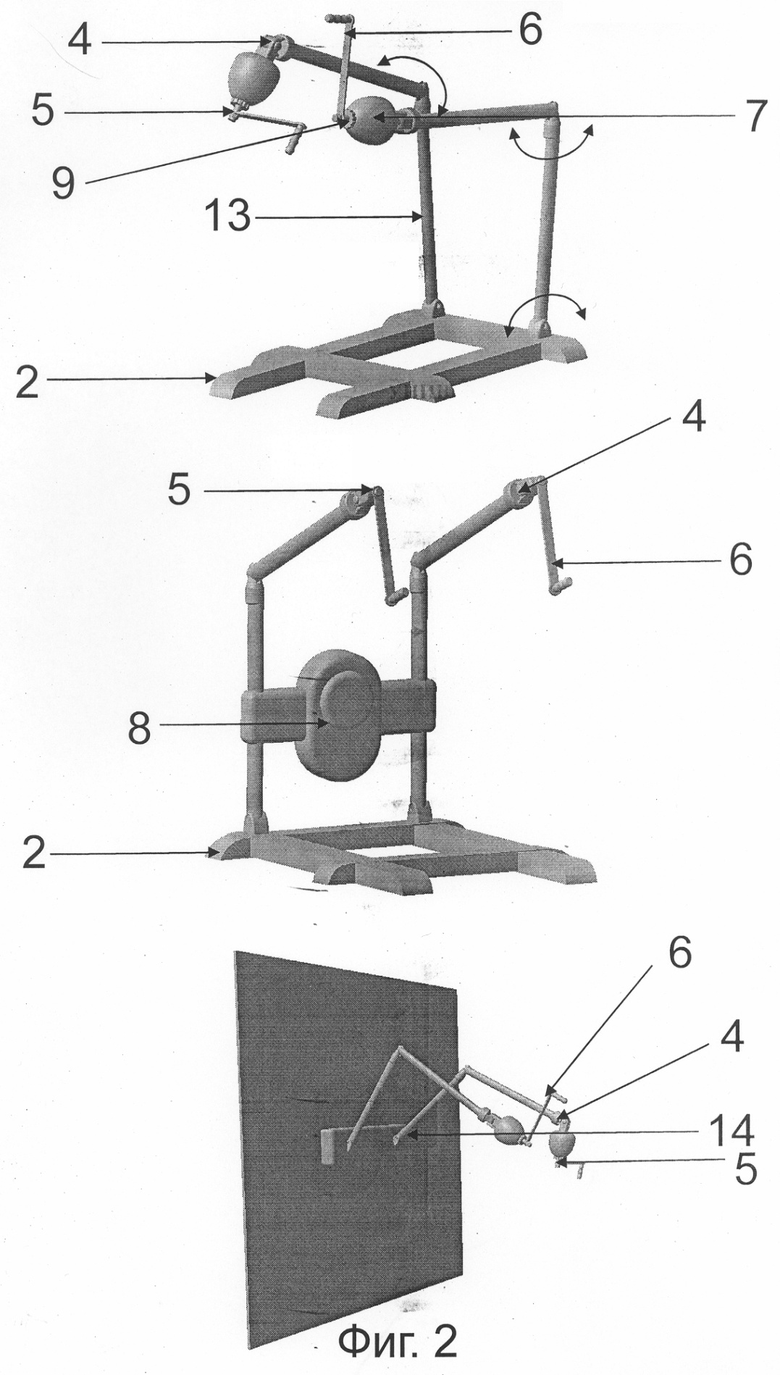
Во втором варианте тренажера фиг.2 реализована схема из двух кинематических цепей с 5 вращательными кинематическими парами 5 класса в каждой. Первым звеном, в каждой кинематической цепи, является основание 2. Второе, в виде удлиненного стержня 13, шарнирно закреплено в основании, расположенном на полу или прикрепленном к стене 14, или к потолку. Третье образует вращательную кинематическую пару со вторым, а четвертое, предпочтительно большей длины, чем третье, образует вращательную кинематическую пару с третьим. На конце четвертого звена установлена шарнирная пара 4, которая ориентирует ось вращения вала 5 кривошипной рукоятки 6, при этом все звенья имеют фиксаторы их положения относительно осей вращения. Как и в первом варианте на последнем звене несущей конструкции может быть установлен размещенный в корпусе механизм для создания нагрузки 7, нагружающее устройство которого связано с валом кривошипной рукоятки. Аналогично, общий для рукояток механизм, для создания нагрузки 8, может быть закреплен между двух парных, предпочтительно двух вторых звеньев, либо расположен в основании, а вращающий момент от вала, к которому крепится кривошипная рукоятка, передается на механизм для создания нагрузки через гибкий вал или шарнирное соединение.
Тренажер может выполняться с одной стойкой, для большей компактности, или с четырьмя и более в том случае, если тренажер предназначен для использования в тренажерных залах.
Для облегчения процесса перемещения тренажера, закрепленного в основании, в последнем могут быть размещены колеса или ролики, в том числе съемные, или с возможностью смещения в вертикальной плоскости, чтобы в статичном состоянии, давление, создаваемое тренажером на поверхность, распределялась по всей площади основания.
Кроме того, возможно выполнение одного или двух длинных звеньев тренажера телескопическими, с фиксаторами, что позволяет уменьшить габариты тренажера в нерабочем состоянии, а также повысить удобство работы с ним.
Механизм для создания нагрузки, предпочтительно, может содержать регулятор нагрузки 9, а также датчики и/или индикаторы нагрузки и состояния тренирующегося, показания которых отображаются на дисплее.
Для выполнения упражнений лежа или сидя тренажер может быть оборудован скамейкой 10, снабженной регулируемыми упорами для ног, установленной с возможностью продольного перемещения и фиксации, в том числе откидной 11, так чтобы в поднятом состоянии она крепилась между вертикальных стоек, а также составной из последовательно расположенных на раме регулируемого по росту подголовника, опоры для спины с возможностью регулировки угла наклона, сиденья неподвижного или выполненного с возможностью подъема для использования в качестве упора для рук.
Дополнительно к скамейке могут крепиться ремни фиксации ног и корпуса, а также расположенные по краям скамейки регулируемые ручки для рук, предназначенные для удержания тела при выполнении упражнений ногами.
Выполнение разнообразных упражнений обеспечивается также с помощью различных вариантов конструкции рукоятки, показанных на фиг.3.
Со сменными рукоятками 15 разной длины от 5 до 100 см и/или складными.
С одной или несколькими сменными кривошипными рукоятками, в которых расстояние от оси вращения рукоятки до оси вращения ручки изменяемое, например, телескопическими 16, с возможностью фиксации 18, одной части рукоятки относительно другой неподвижно или подвижно, с помощью пружины 17 или поршня, или раздвижными рукоятками 19, с возможностью фиксации или со вставками разной длины 20.
С рычагом кривошипной рукоятки, выполненным с возможностью упругого изгиба в плоскости, перпендикулярной плоскости вращения 21.
С Т-образной рукояткой 22 для выполнения качательных движений двумя руками.
Рукояткой 23 с ручкой, съемной или несъемной, ось которой соединена с рукояткой, в том числе, шарнирно, с возможностью фиксации, выполненной из двух частей, первая из которых установлена, с возможностью свободного вращения, на оси перпендикулярно плоскости вращения рукоятки, а вторая выполнена неподвижно или подвижно соединенной с первой, перпендикулярно ей и параллельно плоскости вращения с рукояткой, выполненной с возможностью для захвата двумя руками 24.
Рукоятка с педалью для ног 25, съемной или несъемной, в том числе снабженная ремнями 26 для фиксации ступни, либо в форме обуви, либо с механизмом крепления к обуви.
Система креплений, с возможностью фиксации, на голове, груди, или торсе, соединенной с двумя рукоятками, расположенными в одной плоскости, по разные стороны относительно тела тренирующегося, предназначенной для выполнения упражнений с участием мышц шеи и торса.
Кроме того, могут применяться, для выполнения упражнений, элементы несущей конструкции, например горизонтальные стойки, в качестве брусьев, а балка 12 между вертикальными стойками в качестве турника.
Использование тренажера осуществляется следующим образом.
Для тренировки мышц плечевого пояса тренирующийся устанавливает рабочую часть в нужное положение, например так чтобы рукоятка вращалась в горизонтальной плоскости, выбирает необходимую длину рукоятки и режим нагрузки, располагается, стоя или сидя на скамейке, и производит вращательные движения руками.
Для тренировки ног занимающийся устанавливает рукоятки с педалями, либо с механизмом фиксации ступни или обуви, рабочие части приводит в такое положение, чтобы плоскости вращения рукояток были вертикальны и параллельны, размещается сидя или лежа на скамейке и вращает педали как на велотренажере. В другом варианте упражнения рабочие части устанавливаются так, чтобы плоскость вращения была, например, горизонтальная, а расстояние от скамейки до рукояток соответствовало длине ноги, тренирующийся ложится спиной на скамейку, фиксирует корпус, фиксирует ступни ног, с помощью другого человека, в механизме фиксации и совершает прямыми ногами вращательные движения.
Для тренировки мышц шеи или торса рукоятки размещаются по обе стороны от тренирующегося, система крепления закрепляется на голове или корпусе и рукоятках так, чтобы расстояние между точками крепления к рукояткам было равно расстоянию между осями вращения рукояток, после чего занимающийся совершает вращательные движения головой или корпусом.
Таким образом, использование данного тренажера дает возможность эффективно тренировать мышцы всего тела, при этом сравнительный анализ, с другими известными тренажерами, показал, что многие упражнения могут выполняться только при использовании данного тренажера.
Промышленная применимость изобретения состоит в том, что предлагаемое устройство может быть использовано при изготовлении тренажеров.
Вышеизложенные сведения о заявленном изобретении, охарактеризованные в независимых пунктах формулы, свидетельствуют о возможности его осуществления с помощью описанных в заявке и известных средств.
Следует иметь в виду, что формы выполнения изобретения, описанные в заявке и показанные на чертежах, представляет собой только возможные варианты его осуществления. Могут быть использованы различные вариации выполнения изобретения в отношении исполнения его внешнего вида, применяемых материалов, отдельных узлов, элементов управления и их количества, в то время как сущность и объем изобретения должны ограничиваться только признаками, включенными в формулу изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕЛОТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ТАЗОБЕДРЕННЫХ МЫШЦ И СУСТАВОВ | 2024 |
|
RU2838954C1 |
| КОМБИНИРОВАННЫЙ КОМНАТНЫЙ ТРЕНАЖЕР | 1992 |
|
RU2050881C1 |
| НАБЕДРЕННЫЙ ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ПРОДОЛЬНОГО И ПОПЕРЕЧНОГО "ШПАГАТОВ" (ВАРИАНТЫ) | 2000 |
|
RU2211718C2 |
| Устройство для тренировки | 1990 |
|
SU1747098A1 |
| КОМБИНИРОВАННЫЙ ТРЕНАЖЕР | 1998 |
|
RU2125902C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Силовой тренажер | 1989 |
|
SU1733021A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| ТРЕНАЖЕР | 1991 |
|
RU2015705C1 |
| НАГРУЖАЮЩИЙ МЕХАНИЗМ ДЛЯ ТРЕНАЖЕРОВ (ВАРИАНТЫ) | 2005 |
|
RU2287353C1 |

Универсальный спортивный тренажер предназначен для использования в домашних условиях и в спортивных залах и позволяет расширить диапазон выполняемых упражнений за счет увеличения количества степеней свободы вала кривошипной рукоятки. Тренажер относится к устройствам, в которых для укрепления и развития мускулатуры используются вращательные движения, и содержит, по меньшей мере одну, связанную с механизмом для создания нагрузки кривошипную рукоятку, вращением которой обеспечивается выполнение упражнений. Вал кривошипной рукоятки имеет от трех до шести степеней свободы, одну вокруг собственной оси, две, обеспечивающие ориентацию оси вращения вала, и от одной до трех степеней свободы для изменения пространственного положения вала. 3 н. и 40 з.п. ф-лы, 3 ил.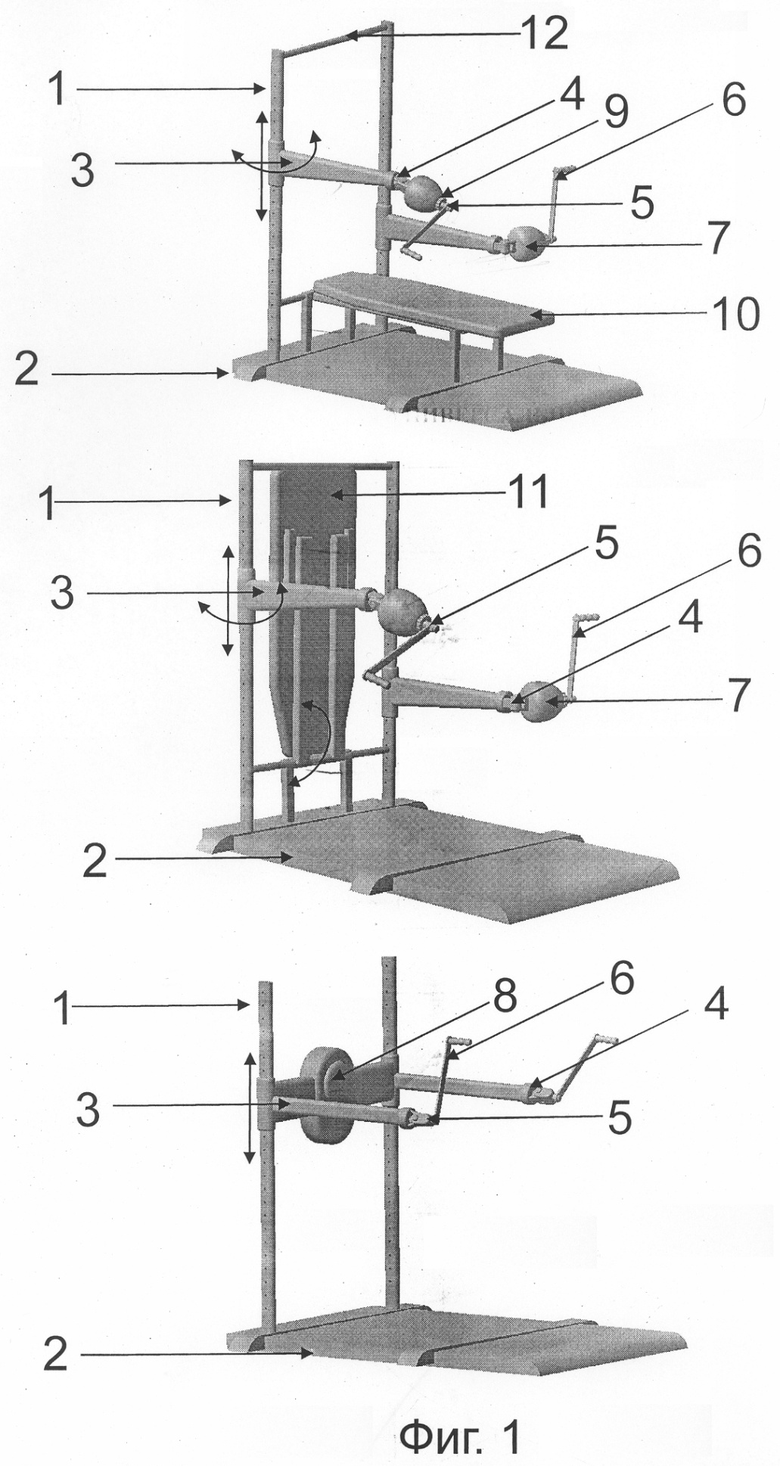
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5755645 A, 26.05.1998 | |||
| Огнетушитель | 0 |
|
SU91A1 |
| ТРЕНАЖЕР | 1991 |
|
RU2015705C1 |

