Изобретение относится к машиностроению и может быть использовано в составе искусственных спутников Земли, преимущественно находящихся на геостационарной орбите, в качестве приводов антенн или их рефлекторов, а также в приводах систем автоматики ракетных двигателей.
Известен привод, содержащий корпус, установленный в нем выходной вал, а также электродвигатель, вал которого связан с выходным валом через редуктор планетарного типа, и 3 датчика положения выходного вала [1]. Недостатком этого электропривода является узкая область использования, обусловленная необходимостью использования в его конструкции только моментного электродвигателя с кольцевым ротором. Двигатели других типов, которые составляют большинство, неприменимы из-за невозможности передачи вращения выходного вала на датчики положения внутри тела ротора электродвигателя.
Этого недостатка лишен выбранный в качестве прототипа привод, содержащий корпус, установленный в нем двигатель, редуктор с входной ступенью в виде цилиндрической зубчатой передачи, шестерня которой установлена на валу двигателя, а зубчатое колесо - на промежуточном валу, размещенном в корпусе на двух подшипниках, и выходной ступенью в виде зубчатой передачи, выходное звено которой жестко закреплено на выходном валу, размещенном в корпусе на двух подшипниках, а также связанный с выходным валом датчик положения [2].
Недостатком такого привода является низкая технологичность, так как подшипники редуктора, электродвигатель и датчик положения размещены в трех различных деталях - корпусе редуктора, крышке редуктора и корпуса статора датчика положения. Для обеспечения заданных межосевых расстояний между зубчатыми колесами, отсутствия перекоса валов и соосности датчика положения с выходным валом привода необходима совместная обработка посадочных поверхностей в этих трех деталях в составе сборки, что удорожает обработку, требует выполнения дополнительных базирующих поверхностей для обеспечения неизменного относительного положения упомянутых трех деталей и использования крепежных деталей. Также выполнение корпуса привода из трех деталей приводит к снижению коэффициента использования материала, так как увеличивается количество отходов по сравнению с корпусом, который выполнялся бы в виде единой детали. Но в рамках данного технического решения подобное выполнение корпуса в виде единой детали неприменимо из-за невозможности осуществить в таком случае сборку привода. Другим недостатком прототипа является значительная масса, обусловленная вышеупомянутой необходимостью выполнения дополнительных базирующих поверхностей для обеспечения неизменного относительного положения деталей корпуса и использования крепежных деталей.
Задачей, решаемой заявленным изобретением, является повышение технико-экономических показателей за счет улучшения технологичности и снижение массы привода.
Технический результат достигается тем, что в известном приводе, содержащем корпус, установленный в нем двигатель, редуктор с входной ступенью в виде цилиндрической зубчатой передачи, шестерня которой установлена на валу двигателя, а зубчатое колесо - на промежуточном валу, размещенном в корпусе на двух подшипниках, и выходной ступенью в виде зубчатой передачи, выходное звено которой жестко закреплено на выходном валу, размещенном в корпусе на двух подшипниках, а также связанный с выходным валом датчик положения, согласно изобретению корпус выполнен в виде единой детали, выходная ступень редуктора выполнена в виде червячной передачи, а выходное звено выполнено в виде червячного сектора, при этом червяк червячной передачи установлен на промежуточном валу между его подшипниками, а зубчатое колесо цилиндрической зубчатой передачи размещено за пределами зоны размещения подшипников промежуточного вала, при этом в корпусе выполнены параллельные расточки для размещения двигателя и промежуточного вала, скрещивающаяся под прямым углом с параллельными расточками расточка для размещения выходного вала и параллельная последней расточка для размещения датчика положения, шестерня и зубчатое колесо цилиндрической зубчатой передачи размещены снаружи корпуса, а в корпусе между подшипниками промежуточного вала выполнен паз для размещения червячного сектора.
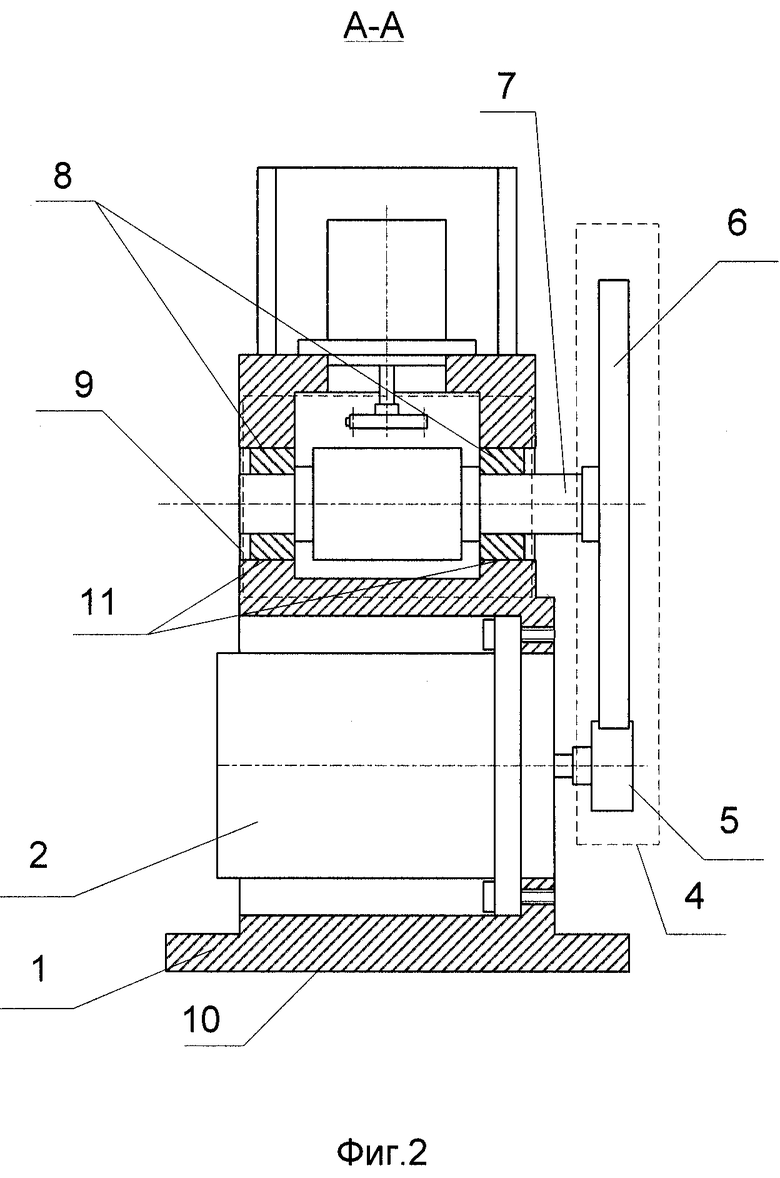
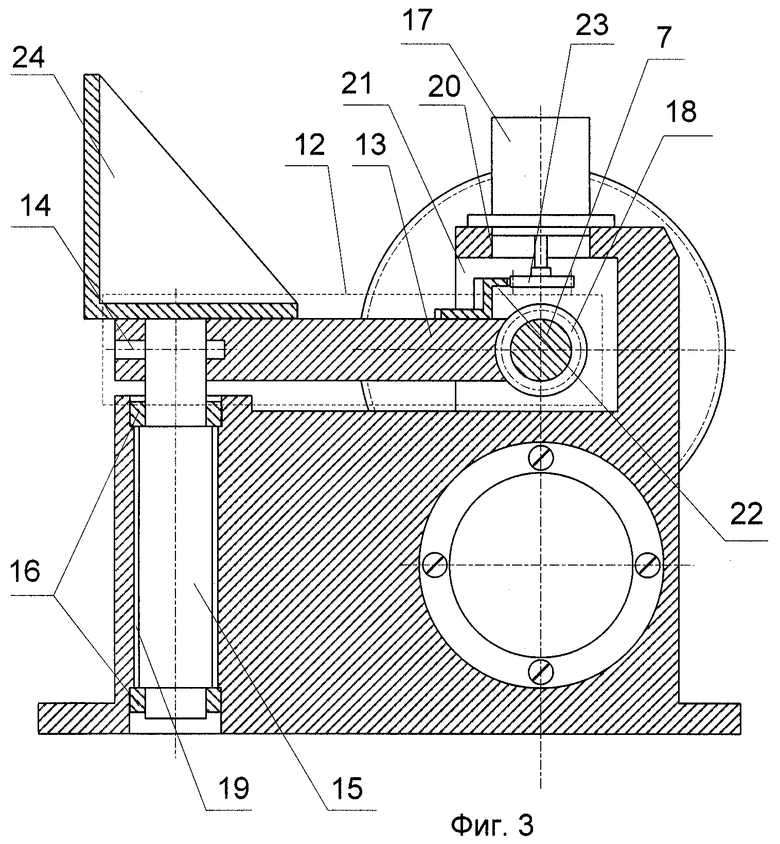
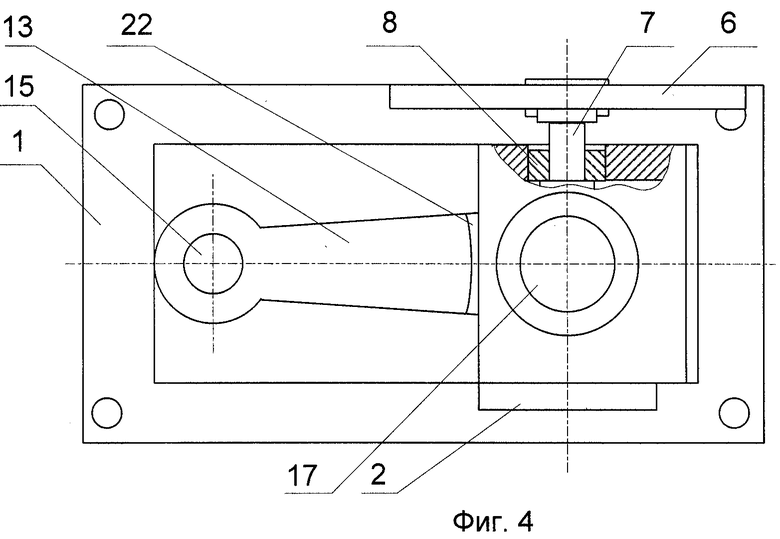
На фиг.1 приведен пример конкретного исполнения привода, главный вид, на фиг.2 - то же, разрез по А-А, на фиг.3 - то же, продольный разрез, на фиг.4 - то же, вид сверху (кронштейн для крепления нагрузки не показан).
Привод содержит корпус 1, выполненный в виде единой детали, установленный в нем двигатель 2 - в данном примере электрический - и редуктор 3. Входная ступень редуктора 3 выполнена в виде цилиндрической зубчатой передачи 4, шестерня 5 которой установлена на валу двигателя 2, а зубчатое колесо 6 - на промежуточном валу 7, размещенном в корпусе на двух подшипниках 8. Зубчатое колесо 6 цилиндрической зубчатой передачи 4 размещено за пределами зоны 9 размещения подшипников промежуточного вала, шестерня 5 и зубчатое колесо 6 цилиндрической зубчатой передачи 4 размещены снаружи корпуса 1. В корпусе 1 выполнены параллельные расточки 10 для размещения двигателя 2 и 11 для размещения промежуточного вала 7. Выходная ступень редуктора 3 выполнена в виде червячной зубчатой передачи 12, выходное звено которой выполнено в виде червячного сектора 13 и жестко закреплено посредством штифта 14 на выходном валу 15, размещенном в корпусе 1 на двух подшипниках 16. Привод содержит также связанный с выходным валом 15 датчик положения 17. Червяк 18 червячной зубчатой передачи 12 установлен на промежуточном валу 7 между его подшипниками 8 и выполнен за одно целое с ним. В корпусе 1 также выполнены скрещивающаяся под прямым углом с параллельными расточками 10 и 11 расточка 19 для размещения выходного вала 15 и параллельная расточке 19 расточка 20 для размещения датчика положения 17. В корпусе 1 между подшипниками 8 промежуточного вала 7 выполнен паз 21 для размещения червячного сектора 13. Связь датчика положения 17 с выходным валом 15 осуществляется через прямозубую зубчатую передачу между неподвижно установленным на червячном секторе 13 зубчатым сектором 22 и установленным на валу датчика положения 17 зубчатым колесом 23. На червячном секторе 13 неподвижно установлен кронштейн 24 для нагрузки - рефлектора антенны (не показана). На иллюстрациях не показаны также мелкие крепежные элементы - пружинные кольца, фиксирующие подшипники 8 и 16, элементы крепления датчика 17 к корпусу 1, кронштейна 24 и зубчатого сектора 22 к червячному сектору 13.
Привод работает следующим образом: при включении двигателя 2 вращается установленная на его валу шестерня 5. Далее вращение через цилиндрическую зубчатую передачу 4 передается на зубчатое колесо 6, промежуточный вал 7 и червяк 18. Вращение червяка 18 приводит к повороту находящегося с ним в зацеплении червячного сектора 13 и выходного вала 15, а также установленного на секторе 13 кронштейна 24. При этом поворот установленного на червячном секторе 13 зубчатого сектора 22 приводит к вращению зубчатого колеса 23, установленного на валу датчика положения 17, что приводит к изменению показаний датчика положения 17. Благодаря заявленной геометрии корпуса все расточки - 10, 11, 19 и 20 легко выполняются в одной детали, при этом обеспечивается легкость контроля их взаимного положения. Использование червячной передачи с червячным сектором позволяет существенно снизить общие габариты и массу. Хотя угол поворота червячного сектора невелик - он ограничен стенками паза 21 - заявленный привод полностью применим для приводов антенн спутников связи, находящихся на геостационарной орбите. Поскольку угол обзора Земли с геостационарной орбиты составляет около 19°, то при условии установки антенны на кронштейн 24 полный угол поворота червячного сектора, необходимый для обеспечения связи с любой точкой на поверхности Земли, будет равен 19°, в случае же, если на кронштейн устанавливается подвижный рефлектор неподвижной антенны, необходимый угол поворота червячного сектора будет вдвое меньше, т.е. 9,5°. Понятно, что для обеспечения таких углов поворота заявленная конструкция вполне подходит, при этом масса и габариты привода существенно снижаются по сравнению с приводом той же конструкции, но с использованием червячного колеса, а не сектора. В последнем случае было бы необходимо также увеличение базы между подшипниками 8 для исключения интерференции червячного колеса с ними, связанное с увеличением базы снижение жесткости червяка и увеличение массы корпуса.
В результате использования изобретения существенно повышается технологичность привода вследствие устранения совместной обработки, выполнения дополнительных базирующих поверхностей для обеспечения неизменного относительного положения упомянутых трех деталей и использования крепежных деталей. Снижается масса привода за счет устранения дополнительных базирующих поверхностей и крепежных деталей. Также выполнение корпуса привода в виде единой детали приводит к повышению коэффициента использования материала, так как снижается количество отходов по сравнению с корпусом, который выполнялся сборным из трех деталей.
Указанные преимущества - повышение технологичности и снижение массы привода - позволяют рекомендовать заявленное техническое решение к использованию в приводах антенн и их рефлекторов спутников связи, находящихся на геостационарной орбите.
Литература
1. Патент Российской федерации N1754990 по кл. F 16 H 1/48, 1992 г.
2. "Атлас конструкций элементов приборных устройств" под редакцией О.Ф.Тищенко, М., "Машиностроение", 1982 г., лист 81, стр.108 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОДЪЕМА АНТЕННЫ | 2010 |
|
RU2428609C1 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ АНТЕННЫ | 2015 |
|
RU2610519C1 |
| Рулевой привод | 2024 |
|
RU2826230C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| Усилитель рулевого управления с электрическим приводом | 2019 |
|
RU2721452C1 |
| Устройство для выравнивания скорости ножей летучих ножниц | 1980 |
|
SU975256A1 |
| РУЛЕВОЙ БЛОК БЕСПИЛОТНОГО УПРАВЛЯЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2717327C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ | 2002 |
|
RU2201537C1 |
| МЕХАНИЗМ РАЗВЕРТЫВАНИЯ АНТЕННЫ | 2016 |
|
RU2633798C1 |
Изобретение относится к приводным механизмам и может быть использовано в качестве приводов антенн или их рефлекторов, установленных на искусственных спутниках Земли, находящихся преимущественно на геостационарной орбите. Привод содержит корпус в виде единой детали, установленный в нем двигатель, редуктор и датчик положения. Входная ступень редуктора выполнена в виде цилиндрической зубчатой передачи, шестерня которой установлена на валу двигателя, а зубчатое колесо - на промежуточном валу. Выходная ступень редуктора выполнена в виде червячной передачи, выходное звено которой выполнено в виде червячного сектора и жестко закреплено на выходном валу. При этом червяк червячной передачи установлен на промежуточном валу между его подшипниками, а зубчатое колесо цилиндрической зубчатой передачи размещено за пределами зоны размещения упомянутых подшипников. Шестерня и зубчатое колесо цилиндрической зубчатой передачи размещены снаружи корпуса. Датчик положения связан с выходным валом. В корпусе выполнены параллельные расточки для размещения двигателя и промежуточного вала, скрещивающаяся под прямым углом с ними расточка для размещения выходного вала, параллельная последней расточка для размещения датчика положения и между подшипниками промежуточного вала - паз для размещения червячного сектора. Техническим результатом изобретения является улучшение технологичности и снижение массы привода. 4 ил.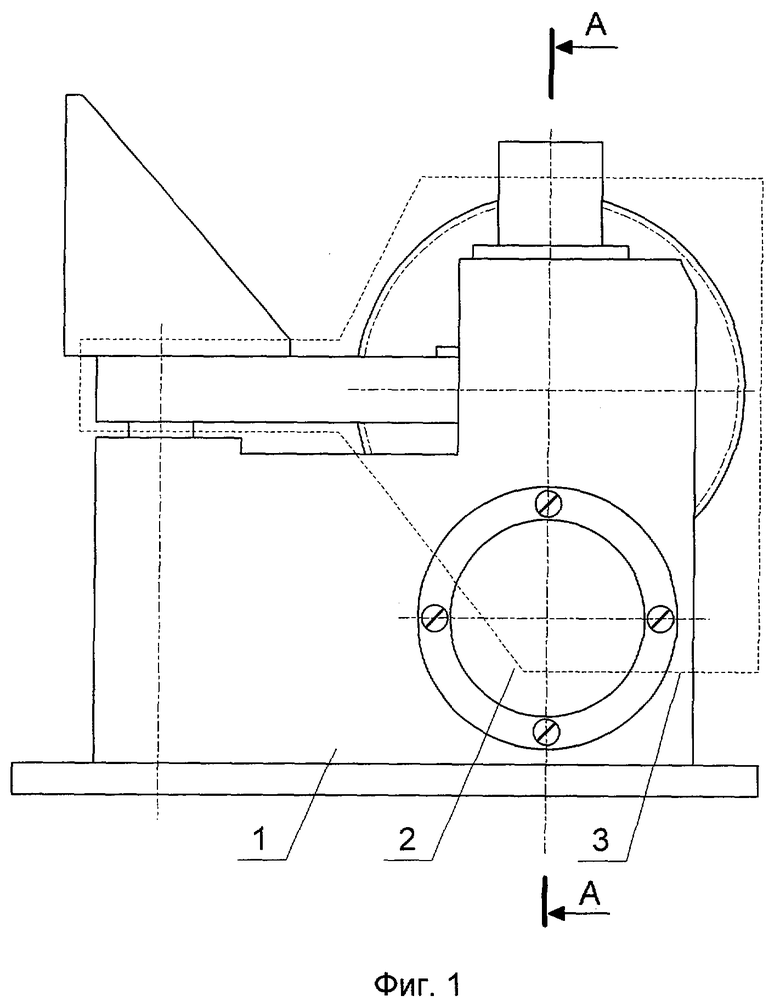
Привод, содержащий корпус, установленный в нем двигатель, редуктор с входной ступенью в виде цилиндрической зубчатой передачи, шестерня которой установлена на валу двигателя, а зубчатое колесо - на промежуточном валу, размещенном в корпусе на двух подшипниках, и выходной ступенью в виде зубчатой передачи, выходное звено которой жестко закреплено на выходном валу, размещенном в корпусе на двух подшипниках, а также связанный с выходным валом датчик положения, отличающийся тем, что корпус выполнен в виде единой детали, выходная ступень редуктора выполнена в виде червячной передачи, а выходное звено выполнено в виде червячного сектора, при этом червяк червячной передачи установлен на промежуточном валу между его подшипниками, а зубчатое колесо цилиндрической зубчатой передачи размещено за пределами зоны размещения подшипников промежуточного вала, при этом в корпусе выполнены параллельные расточки для размещения двигателя и промежуточного вала, скрещивающаяся под прямым углом с параллельными расточками расточка для размещения выходного вала и параллельная последней расточка для размещения датчика положения, шестерня и зубчатое колесо цилиндрической зубчатой передачи размещены снаружи корпуса, а в корпусе между подшипниками промежуточного вала выполнен паз для размещения червячного сектора.
| Атлас конструкций элементов приборных устройств | |||
| Под редакцией О.Ф.Тищенко | |||
| М.: Машиностроение, 1982, с.108, л.81 | |||
| ЭЛЕКТРОПРИВОД | 2002 |
|
RU2216667C1 |
| Устройство для установки датчиков в стенке скважины | 1978 |
|
SU717301A1 |
| Способ получения органоциклоэлементоксанов | 1979 |
|
SU887585A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ПЛЕНОЧНЫХ ПАКЕТОВ | 2002 |
|
RU2251521C2 |
| US 4841309 А, 20.06.1989. | |||

