Изобретение относится к обработке материалов резанием и может быть использовано при обработке некруглых отверстий.
Известно устройство для обработки деталей (авт. св. №1683868, В 23 В 1/00, заявл. 22.03.89, опубл. 15.10.91. БИ №38). Устройство для механической обработки граненых отверстий состоит из корпуса, установленного своим хвостовиком в конической расточке шпинделя сверлильного станка или в задней бабке токарного станка, подвижного элемента, установленного на оси в пазу корпуса с возможностью поворота. С боков подвижный элемент заневолен между двумя осевыми подшипниками, один из которых оперт на стенку внутреннего паза корпуса, а другой - на торец полого винта, закрепленного в резьбовом отверстии корпуса. В пазу подвижного элемента закреплен расточный резец посредством винтов и оперт на поверхность клина, контактирующего с торца с конической поверхностью регулировочного винта. В нижней части подвижного элемента выполнен выступ, в пазу которого посредством винта закреплен с возможностью поворота ролик, контактирующий с накидной гайкой-копиром. Гайка-копир установлена на резьбовой части конуса цанги для крепления заготовки. Недостатком данного устройства является сложная поверхность копира.
Известен способ обработки некруглых поверхностей, преимущественно с синусоидальным профилем (патент РФ №2254964, В 23 В 1/00, заявл. 10.06.2004, опубл. 27.06.05. БИ №18), принятый за прототип. Способ заключается в том, что инструменту в виде резца сообщают вращательное движение резания, поступательное движение подачи и радиальное перемещение по заданному закону посредством копира. Для повышения точности и качества обработанной поверхности за счет упрощения формы копира инструмент базируют посредством передаточного звена в виде рычага на поверхность копира, а радиальное перемещение инструмента относительно оси вращения осуществляют по приведенному закону. Устройство содержит корпус с копиром, вал, в который установлен рычаг со щупом, инструмент, который связан с копиром посредством рычага и щупа. Для достижения того же технического результата рабочая поверхность копира выполнена в виде неподвижной плоской поверхности, расположенной под углом к оси инструмента. При этом инструмент установлен в прямолинейную направляющую.
Недостатком прототипа является ограниченные технологические возможности. Так как копир в виде наклонной плоской поверхности неподвижен, то радиальное перемещение инструмента всегда осуществляется по одному и тому же закону, т.е. траектория движения инструмента за один оборот представляет собой синусоиду с одной осью симметрии.
Технической задачей изобретения является расширение технологических возможностей, а именно возможность получения синусоидальных поверхностей с любым количеством осей симметрии.
Поставленная техническая задача решается тем, что в способе обработки некруглых поверхностей деталей, преимущественно с синусоидальным профилем, инструменту в виде резца сообщают вращательное движение резания, поступательное движение подачи и радиальное перемещение по заданному закону посредством копира, при этом инструмент базируют через передаточное звено в виде рычага на поверхность копира, согласно изобретению копиру придают вращательное движение, кинематически связанное с вращательным движением инструмента, а радиальное перемещение инструмента относительно оси вращения осуществляют по закону
ρ(ψ)=R+Up·l·tg(α)·(1-cos((n+(-1)m)·ψ)),
где l - расстояние от оси вращения до точки контакта с копиром,
 - передаточное отношение рычага,
- передаточное отношение рычага,
L1 и L2 - плечи рычага,
ψ - угол поворота инструмента,
α - угол наклона плоской поверхности к плоскости, перпендикулярной оси вращения,
R - расстояние от оси вращения до вершены инструмента при максимальном удалении точки контакта с копиром от вершины инструмента, измеренное в плоскости, параллельной оси вращения инструмента,
(n+(-1)m) - количество осей симметрии синусоиды,
m - четное число, если вращения копира и инструмента осуществляют в противоположных направлениях, и нечетное число, если вращения копира и инструмента осуществляют в одну сторону.
Придание копиру вращательного движения, кинематически связанного с вращательным движением инструмента, позволяет инструменту при его полном обороте занимать требуемое количество раз крайне удаленное или крайне приближенное относительно оси вала положение, что и обеспечивает получение необходимого количества выступов и впадин синусоидального профиля.
Для осуществления способа предлагается устройство, содержащее корпус, копир, вал, в который установлен рычаг со щупом и инструментом, который связан с копиром, рабочая поверхность которого выполнена в виде плоской поверхности расположенной под углом  к оси поворота инструмента, посредством рычага и щупа, в котором согласно изобретению копир установлен с возможностью вращения в разных направлениях, причем вал с инструментом и копир связаны через редуктор с передаточным отношением
к оси поворота инструмента, посредством рычага и щупа, в котором согласно изобретению копир установлен с возможностью вращения в разных направлениях, причем вал с инструментом и копир связаны через редуктор с передаточным отношением  , входное колесо которого закреплено на валу, выходное колесо жестко связано с копиром.
, входное колесо которого закреплено на валу, выходное колесо жестко связано с копиром.
Сравнение заявленного изобретения с прототипом позволяет сделать вывод о достижении нового эффекта, выразившегося в возможности обработки синусоидальных цилиндрических поверхностей с любым количеством осей симметрии.
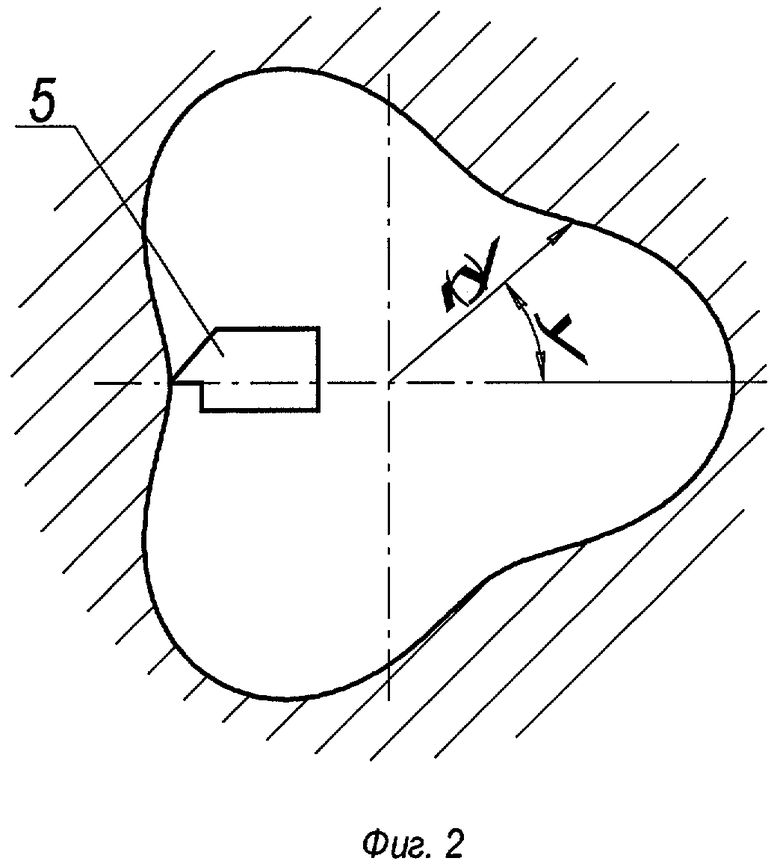
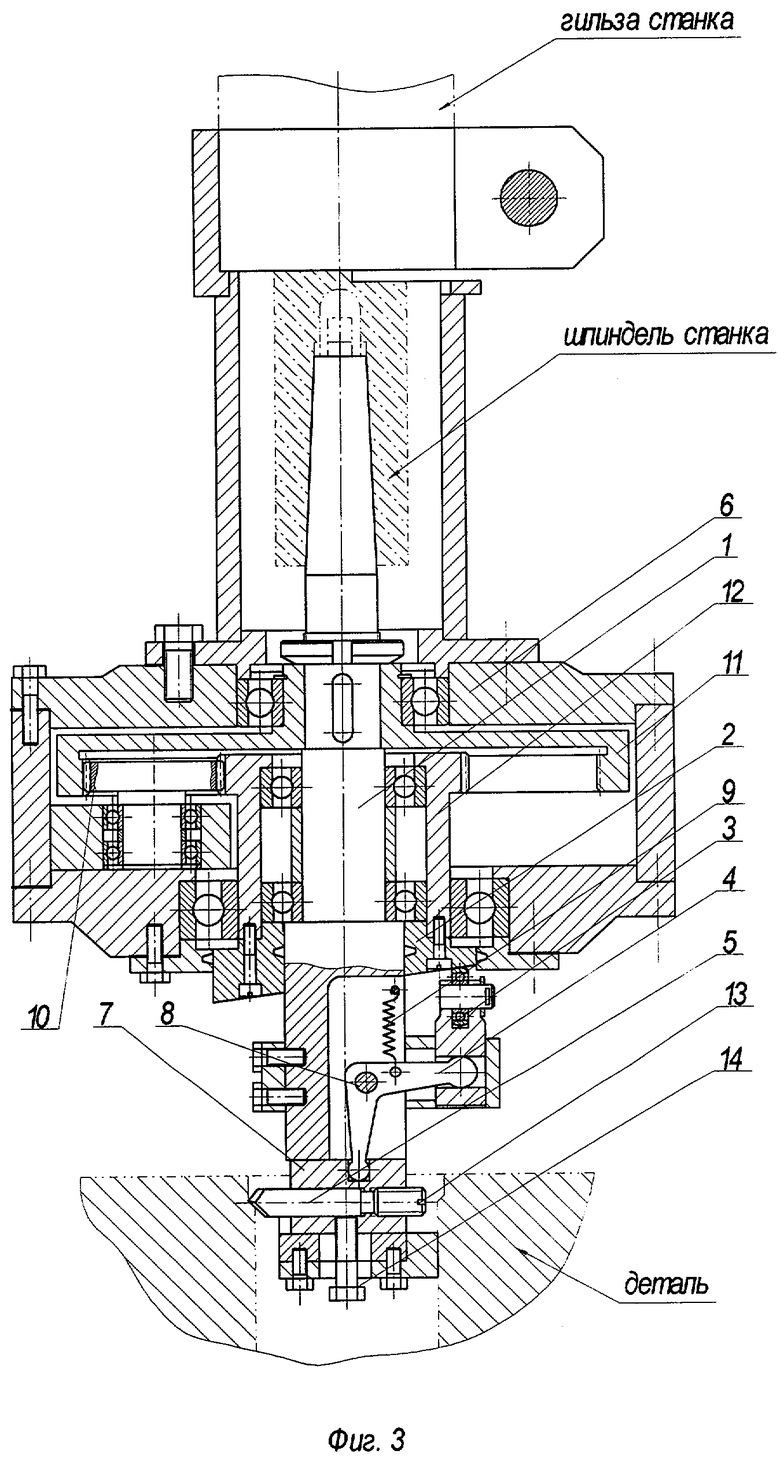
Сущность изобретения поясняется чертежами, где на: фиг.1 дана схема реализации способа обработки некруглых поверхностей; фиг.2 - профиль некруглой поверхности; фиг.3 - устройство для реализации способа обработки некруглых цилиндрических поверхностей.
Способ обработки некруглых поверхностей деталей, преимущественно с синусоидальным профилем, заключается в том, что валу 1, связанному со шпинделем сверлильного станка, придают вращательное движение с угловой скоростью ω, а копиру 2 с плоской рабочей поверхностью А - вращательное движение с угловой скоростью ω1. При этом передаточное отношение вращательных движений устанавливают равным  , где n - целое число. Вращения вала 1 и копира 2 могут осуществлять в одном направлении или в разных направлениях. Таким образом, относительное вращательное движение копира 2 при остановленном вале 1 производят со скоростью (n-1)·ω, если вращения вала 1 и копира 2 совпадают по направлению, и со скоростью (n+1)·ω, если вращения вала 1 и копира 2 разнонаправлены. При этом щупу 3, контактирующему с неподвижной наклонной плоской поверхностью А копира 2 в точке О, придают возвратно-поступательное движение по закону:
, где n - целое число. Вращения вала 1 и копира 2 могут осуществлять в одном направлении или в разных направлениях. Таким образом, относительное вращательное движение копира 2 при остановленном вале 1 производят со скоростью (n-1)·ω, если вращения вала 1 и копира 2 совпадают по направлению, и со скоростью (n+1)·ω, если вращения вала 1 и копира 2 разнонаправлены. При этом щупу 3, контактирующему с неподвижной наклонной плоской поверхностью А копира 2 в точке О, придают возвратно-поступательное движение по закону:
Δ=l·tg(α)-l·cos((n+(-1)m)·ψ)·tg(α),
где l - расстояние от оси вращения до точки контакта щупа с копиром,
= ω·t - угол поворота инструмента,
α - угол наклона плоской поверхности к плоскости, перпендикулярной оси вращения,
m - четное число, если вращения копира и инструмента осуществляют в противоположных направлениях, и нечетное число, если вращения копира и инструмента осуществляют в одну сторону,
t - время поворота.
При возвратно-поступательном движении щупа 3 связанный с ним плечом длиной L1 рычаг 4 будет поворачиваться, а инструмент 5, связанный с плечом рычага длиной L2, будет перемещаться по закону:
Если за R принять расстояние от оси вращения до вершины инструмента при максимальном удалении точки контакта копир-щуп от вершины инструмента, измеренное в плоскости, параллельной оси вращения инструмента, а отношение длин плеч рычага за Up= , то кривая, описываемая инструментом относительно оси поворота, будет изменяться по закону:
, то кривая, описываемая инструментом относительно оси поворота, будет изменяться по закону:
p(ψ)=R+Up·l·tg(α)·(1-cos((n+(-1)m)·ψ)),
где (n+(-1)m) - количество осей симметрии синусоиды.
Деталь по предложенному способу обработки устанавливается неподвижно на столе станка.
Устройство для осуществления способа обработки некруглых поверхностей деталей, преимущественно с синусоидальным профилем, содержит вал 1, на котором с возможностью вращения расположен копир 2, контактирующий со щупом 3, закрепленным на плече рычага 4, на втором плече которого закреплен инструмент 5. Вал 1 с возможностью вращательного движения установлен в корпусе 6, который закреплен на гильзе сверлильного станка. В валу 1 выполнен паз, в котором установлен с возможностью возвратно-поступательного движения резцедержатель 7 с инструментом 5. Резцедержатель 7 посредством двуплечего рычага 4 связан со щупом 3, причем двуплечий рычаг 4 установлен с возможностью качания на оси 8, которая заневолена в валу 1. Щуп 3 при помощи пружины 9 прижат к копиру 2, который установлен с возможностью вращения в корпус 6 и кинематически связан с валом 1 посредством редуктора 10 таким образом, что входное колесо 11 редуктора 10 закреплено на валу 1, а выходное колесо 12, на котором закреплен копир 2, установлено на валу 1 с возможностью вращения. Инструмент 5 настроен на размер при помощи винта 13 и закреплен в резцедержателе посредством болта 14.
Устройство для осуществления способа работает следующим образом. При вращении вала 1 посредством редуктора 10 вращательное движение передается копиру 2, рабочая поверхность которого выполнена в виде плоскости, причем вращение копира 2 осуществляется в n раз быстрее вала 1. При этом щуп 3, контактируя с копиром 2, совершает возвратно-поступательное движение в плоскости, параллельной оси вращения вала 1. Посредством двухплечего рычага 4 движение от щупа 3 передается на резцедержатель 7, который совершает возвратно-поступательные движения в плоскости, перпендикулярной оси вращения вала, при этом инструмент 5 относительно оси вращения вала 1 совершает движение по закону:
р(ψ)=R+Up·l·tg(α)·(1-cos((n+(-1)m)·ψ)),
где l - расстояние от оси вращения до точки контакта с копиром,
- передаточное отношение рычага,
L1 и L2 - плечи рычага,
ψ - угол поворота инструмента,
α - угол наклона плоской поверхности к плоскости, перпендикулярной оси вращения,
R - расстояние от оси вращения до вершены инструмента при максимальном удалении точки контакта с копиром от вершины инструмента, измеренное в плоскости, параллельной оси вращения инструмента,
(n+(-1)m) - количество осей симметрии синусоиды,
m - четное число, если вращения копира и вала с инструментом осуществляются в противоположных направлениях, и нечетное число, если вращения копира и вала с инструментом осуществляются в одну сторону.
Использование предлагаемого устройства позволит получать различные синусоидальные цилиндрические поверхности при использовании простых копиров в виде плоскостей.
Изобретение может быть использовано в технологических системах, применяемых для обработки некруглых цилиндрических поверхностей, профилированных замкнутыми кривыми, например для изготовления деталей профильных соединений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 2004 |
|
RU2254964C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИНУСОИДАЛЬНЫХ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2005 |
|
RU2280539C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕКРУГЛЫХ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2003 |
|
RU2245224C1 |
| КОПИРОВАЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 1997 |
|
RU2118247C1 |
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
SU1823295A1 |
| Устройство для токарной обработки поршневых колец | 1990 |
|
SU1745405A1 |
| Способ обработки деталей и устройство для его осуществления | 1989 |
|
SU1683868A1 |
| Способ обработки некруглых поверхностей и устройство для его осуществления | 1990 |
|
SU1782696A1 |
| СПОСОБ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2214889C1 |
| УСТРОЙСТВО ДЛЯ ТОКАРНОЙ ОБРАБОТКИ ПАКЕТОВ ПОРШНЕВЫХ ИЛИ УПЛОТНИТЕЛЬНЫХ КОЛЕЦ | 2001 |
|
RU2179090C1 |
Изобретение относится к области машиностроения, обработке металлов резанием. Способ включает сообщение инструменту в виде резца вращательного движения резания, поступательного движения подачи и радиального перемещения по заданному закону посредством копира. При этом инструмент базируют через передаточное звено в виде рычага на поверхность копира. Для расширения технологических возможностей копиру придают вращательное движение, кинематически связанное с вращательным движением инструмента, а радиальное перемещение инструмента относительно оси вращения осуществляют по приведенному закону. Устройство содержит корпус, копир, вал, в который установлен рычаг со щупом, инструмент, который посредством рычага и щупа связан с копиром, рабочая поверхность которого выполнена в виде плоской поверхности, расположенной под углом к оси поворота инструмента. Для достижения того же технического результата копир установлен с возможностью вращения в разных направлениях, причем вал с инструментом и копир связаны через редуктор, входное колесо которого закреплено на валу, а выходное колесо жестко связано с копиром. 2 н.п. ф-лы, 3 ил.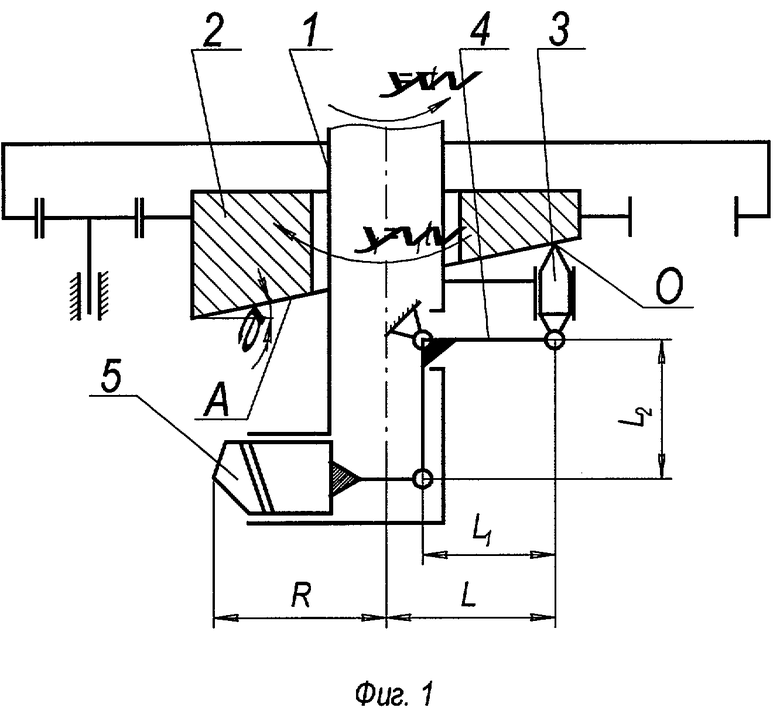
ρ(ψ)=R+Up·l·tg(α)·(1-cos((n+(-1)m)·ψ)),
где l - расстояние от оси вращения до точки контакта с копиром,
 - передаточное отношение рычага,
- передаточное отношение рычага,
L1 и L2 - плечи рычага,
ψ - угол поворота инструмента,
α - угол наклона плоской поверхности к плоскости, перпендикулярной оси вращения,
R - расстояние от оси вращения до вершины инструмента при максимальном удалении точки контакта с копиром от вершины инструмента, измеренное в плоскости, параллельной оси вращения инструмента,
(n+(-1)m) - количество осей симметрии синусоиды,
m - четное число, если вращения копира и инструмента осуществляют в противоположных направлениях, и нечетное число, если вращения копира и инструмента осуществляют в одну сторону.
 где α - угол наклона плоской поверхности к плоскости, перпендикулярной оси вращения, к оси поворота инструмента, отличающееся тем, что копир установлен с возможностью вращения в разных направлениях, причем вал с инструментом и копир связаны через редуктор с передаточным отношением
где α - угол наклона плоской поверхности к плоскости, перпендикулярной оси вращения, к оси поворота инструмента, отличающееся тем, что копир установлен с возможностью вращения в разных направлениях, причем вал с инструментом и копир связаны через редуктор с передаточным отношением  входное колесо которого закреплено на валу, а выходное колесо жестко связано с копиром.
входное колесо которого закреплено на валу, а выходное колесо жестко связано с копиром.| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 2004 |
|
RU2254964C1 |
| Устройство для обработки фигурных отверстий на сверлильном станке | 1987 |
|
SU1445866A1 |
| Способ обработки деталей и устройство для его осуществления | 1989 |
|
SU1683868A1 |
| СПОСОБ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2214889C1 |
| US 5396821 A, 14.03.1995. | |||

