Изобретение относится к области гидроакустики и может быть использовано для измерения и контроля параметров шумоизлучения движущегося подводного объекта (ПО).
Известен лазерный гидрофон (ЛГ), содержащий оптический доплеровский измеритель скорости, собранный по схеме с опорным пучком, и генератор светорассеивающих частиц с инжектором. В обшивке ПО выполнено оптическое окно, через которое лазерное излучение на длине волны 0,4 мкм формирует в жидкости рабочий объем, в котором доплеровским способом измеряется колебательная скорость светорассеивающих частиц и по ее величине определяют уровень звукового давления шумоизлучения ПО [Патент США №5175713, кл. 367-151, 340-557 (H 04 R 23/00, Н 04 Р 13/02, 1992)].
Недостатком данного аналога является невозможность измерения колебательной скорости звуковой волны сразу в нескольких объемах жидкой среды.
Известен ЛГ, принятый за прототип, содержащий расположенные на шумящем движущемся подводном объекте генератор светорассеивающих частиц с дозатором, источник света и оптически согласованные с ним передающий объектив, два светоотражателя, установленных под углом 45° к оптической оси гидрофона, первый из которых выполнен полупрозрачным, первое оптическое окно, первый фотоприемник, подключенный выходом к частотно-временному анализатору, первый пространственный модулятор, установленный перед первым фотоприемником, и первый приемный объектив, установленный между первым пространственным модулятором и первым оптическим окном, и оптически согласованные между собой второе оптическое окно и второй приемный объектив, а также расположенный в жидкости вне ПО инжектор светорассеивающих частиц, соединенный с дозатором генератора светорассеивающих частиц [Патент РФ №2185709, кл. H 04 R 1/44, G 01 S 17/06, 2002].
ЛГ в прототипе собран по схеме доплеровского измерителя скорости с опорным пучком. При этом ЛГ позволяет измерять колебательную скорость звуковых волн в четырех измерительных объемах. Это в свою очередь дает возможность определить более десятка векторных и скалярных характеристик гидроакустического поля вне ПО.
Недостатком прототипа является невозможность с его помощью измерять интегральные и локальные характеристики гидроакустического поля сразу в большой исследуемой области вдоль ПО.
Техническим результатом, получаемым от внедрения изобретения, является получение возможности измерения ЛГ одновременно с локальными характеристиками интегральных характеристик гидроакустического поля сразу в большой исследуемой области вдоль продольной оси ПО.
Данный технический результат достигают за счет того, что известный ЛГ, содержащий расположенные на шумящем движущемся ПО генератор светорассеивающих частиц с дозатором, источник света и оптически согласованные с ним передающий объектив, два светоотражателя, установленных под углом 45° к оптической оси гидрофона, первый из которых выполнен полупрозрачным, первое оптическое окно, первый фотоприемник, подключенный выходом к частотно-временному анализатору, первый пространственный модулятор, установленный перед первым фотоприемником, и первый приемный объектив, установленный между первым пространственным модулятором и первым оптическим окном, и оптически согласованные между собой второе оптическое окно и второй приемный объектив, а также расположенный в жидкости вне поля ПО инжектор светорассеивающих частиц, соединенный с дозатором генератора светорассеивающих частиц, дополнительно содержит расположенные на ПО второй фотоприемник, подключенный выходом к частотно-временному анализатору, и второй пространственный модулятор, установленный перед вторым фотоприемником, оптически связанным через второй приемный объектив со вторым оптическим окном, установленным на обшивке ПО, а также приемно-передающий оптический тубус, установленный в жидкости вдоль оптической оси гидрофона ортогонально обшивке ПО, при этом второй светоотражатель расположен в тубусе и выполнен глухим, а первое оптическое окно установлено на стенке тубуса напротив второго светоотражателя, причем первый пространственный модулятор выполнен в виде оптической решетки с известным шагом штрихов, лежащих в плоскости, изображение которой в жидкости через приемный объектив ориентировано ортогонально, а изображение штрихов - параллельно обшивке корпуса ПО, а второй - в виде двух щелей, расположенных на известном расстоянии друг от друга в направлении, параллельном обшивке корпуса ПО вдоль его продольной оси, при этом инжектор светорассеивающих частиц выполнен с возможностью изменения расстояния между ним и первым оптическим окном, расположенным напротив инжектора.
При этом прозрачность штрихов оптической решетки первого оптического модулятора изменяется по гармоническому закону.
Изобретение поясняется чертежом, на котором представлена оптическая схема ЛГ.
ЛГ содержит расположенные на шумящем движущемся со скоростью V ПО1 генератор 2 светорассеивающих частиц с дозатором (на чертеже не обозначен). К генератору 2 с дозатором примыкает инжектор 3 светорассеивающих частиц, выполненный, например, в виде телескопических трубок 4, 5, которые под действием командного сигнала могут дистанционно выдвигаться вдоль оси ПО 1 (Элементы управления и исполнительные механизмы инжектора на чертеже не показаны).
Инжектор 3 светорассеивающих частиц расположен в жидкости за бортом ПО 1.
ЛГ также содержит оптический тубус 6, расположенный в жидкости, в котором установлены глухой светоотражатель 7 и приемно-передающий объектив 8.
На боковой стенке тубуса 6 установлено оптическое окно 9, расположенное напротив выходного патрубка (трубки 5) инжектора 3 на расстоянии х1 от него. Это расстояние с борта ПО1 может регулироваться.
На ПО1 также расположены полупрозрачный светодержатель 10, передающий объектив 11 и источник света 12 выполненный, например, в виде аргонового лазера.
Полупрозрачный и глухой светоотражатели 10 и 7 установлены под углом 45° к оптической оси лазера, а значит и оптической оси ЛГ (Знак угла в данном случае не является существенным).
Напротив полупрозрачного светоотражателя 10, выполняющего функцию расщепителя, установлены приемный объектив 13 и пространственный модулятор 14, выполненный в виде оптической решетки.
Штрихи оптической решетки 14 ориентированы таким образом, чтобы их изображение через приемный и приемо-передающий объективы 13, 8 проектировались в жидкости так, чтобы плоскость изображения решетки всегда была ортогональна плоскости обшивки ПО1, а направления штрихов решетки были всегда параллельны ей.
В этом случае при любой геометрии оптической схемы ЛГ последний будет измерять колебательную скорость звуковой волны, распространяющейся от обшивки ПО 1 в жидкость.
За оптической решеткой 14 установлен фотоприемник 15, подключенный выходом к частотно-временному анализатору 16.
Прозрачность штрихов оптической решетки 14 изменяется по гармоническому закону.
Элементы 2...16 образуют оптическую схему анемометра колебательных скоростей звуковой волны 17, которые ориентированы вдоль координаты у, ввиду продольной природы звуковых волн.
ЛГ включает в себя также последовательно установленные и оптически согласованные оптическое окно 18, приемный объектив 19, пространственный модулятор 20 и фотоприемник 21. Оптическое окно 18 установлено заподлицо с обшивкой корпуса ПО 1. Пространственный модулятор 20 выполнен в виде двух щелей, расположенных на известном расстоянии друг от друга вдоль направления продольной оси ПО 1 (и направления движения последнего).
Элементы 18...21 образуют времяпролетный измеритель скорости светорассеивающих частиц 22 вдоль ПО 1.
ЛГ работает следующим образом.
При движении ПО 1 со скоростью V вдоль оси х инжектор 3 через трубку 5 впрыскивает в жидкую среду светорассеивающие частицы 22, имеющие плотность, совпадающую с плотностью воды. Частицы 22 двигаются со скоростью V, равной скорости движения ПО 1 вдоль обшивки корпуса ПО 1.
С помощью времяпролетного измерителя скорости известным способом [A.M.Трохан Гидроаэрофизические измерения. М.: Изд-во стандартов, 1981, с.46-55] определяется скорость движения частиц 22 относительно обшивки корпуса ПО 1.
Затем ЛГ измеряют колебательную скорость звуковых волн, распространяющихся от обшивки корпуса ПО 1, частотным способом [См. там же, стр.57]. Измерения могут происходить в трех различных режимах.
В первом режиме выходная трубка 5 инжектора 3 придвигается достаточно близко к оптическому окну 9 тубуса 6, чтобы расстояние х1 было достаточно мало для проведения локальных измерений "в точке" исследуемой среды.
Во втором режиме инжектор 3 устанавливается на максимально большом расстоянии х1 от оптического окна 9. Но дозатор генератора 2 светорассеивающих частиц работает "в одночастичном" режиме, при котором за время пролета частицей расстояния х1 в рабочем объеме будет присутствовать всего одна светорассеивающая частица.
В третьем режиме ЛГ при различных расстояниях х1 в рабочий объем впрыскивается достаточное количество частиц для проведения интегральных измерений колебательных скоростей во всем рабочем объеме при однозначной интерпретации результатов проводимых измерений.
Рассмотрим работу ЛГ в каждом из режимов.
В первом режиме работы гидрофона расстояние х1 выбирается минимальным, но таким, чтобы инжектор не турбулизировал жидкость в рабочем объеме ЛГ. При этом помимо движения по оси х частицы 22 будут испытывать колебательное движение вдоль оси у.
Оптическая решетка 14 с помощью приемного объектива 13 и приемопередающего объектива 8 согласно формуле изобретения таким образом проектируется в измерительный объем ЛГ, что любые движения светорассеивающих частиц 22 вдоль оси у вызывали появление на выходе решетки 14 пульсации светового потока, частота которых несет информацию о колебательной скорости движения частиц, пропорциональной уровню звукового давления. При этом движение частиц вдоль оси х оптическая решетка "не чувствует".
Гармоническое распределение светопрозрачности в штрихах решетки позволяет без дополнительных погрешностей определить параметры колебательной скорости звуковой волны 22 по пульсации фототока, получаемых с фотоприемника 15.
После соответствующей обработки сигнала в частотно-временном анализаторе 16 последний выдает значение параметров шумоизлучения ПО 1.
Во втором режиме работы ЛГ одновременно работают два фотоприемника 15 и 21. Фотоприемник 21 выдает два импульса фототока, временное расстояние между которыми пропорционально скорости V вдоль корпуса ПО 1. Эти сигналы выдают на частотно-временной анализатор 16 развертку по координате х.
Измерения колебательной скорости звуковой волны 17 осуществляется как и в первом режиме работы по частоте сигнала, снимаемого с фотоприемника 15.
При этом частотно-временной анализатор 16 выдает распределение значений колебательных скоростей (и уровней звукового давления) вдоль обшивки корпуса ПО 1.
В третьем варианте работы ЛГ измеряются все значения колебательных скоростей на оптической базе длиной х1.
Таким образом, с помощью ЛГ появляется возможность измерения не только локальных характеристик поля "в точке", но и их распределений в пространстве вдоль обшивки корпуса ПО, а также измерения интегральных характеристик одновременно в большой исследуемой области, чем и достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ВЕКТОРНЫЙ ПРИЕМНИК ДЛЯ ИНФРАЗВУКОВЫХ ПОЛЕЙ | 2005 |
|
RU2290770C1 |
| ОПТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ГИДРОФОН | 2001 |
|
RU2185709C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМНОСТИ ПЛАВСРЕДСТВА С ПОМОЩЬЮ ЛАЗЕРНОГО ГИДРОФОНА | 1999 |
|
RU2167500C1 |
| ГОЛОГРАФИЧЕСКАЯ АКУСТООПТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2003 |
|
RU2236691C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2014 |
|
RU2577791C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука и измерения его координат | 2021 |
|
RU2770564C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море в инфразвуковом диапазоне частот | 2022 |
|
RU2795375C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука и измерения его координат в пассивном режиме | 2021 |
|
RU2767397C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
Изобретение относится к области гидроакустики и может быть использовано для измерения параметров шумоизлучения движущегося подводного объекта (ПО). Техническим результатом изобретения является обеспечение возможности измерения одновременно с локальными характеристиками интегральных характеристик акустического поля в исследуемой области вдоль продольной оси ПО. В исследуемую среду с помощью оптической системы проектируют оптическую решетку с известным пространственным шагом штрихов, лежащих в плоскости, изображение которой в жидкости ориентировано ортогонально, а изображение самих штрихов - параллельно обшивке корпуса ПО. Это позволяет по частоте оптического сигнала, вызванного движением светорассеивающих частиц, определять колебательную скорость звуковой волны, излучаемой корпусом ПО. Причем имеется возможность изменения длины измерительной базы и проводить измерения колебательной скорости звуковых волн как "в точке", так и в большой исследуемой области. В частном режиме работы лазерного гидрофона появляется возможность измерения распределения величины колебательной скорости вдоль обшивки корпуса ПО. 3 з.п. ф-лы, 1 ил.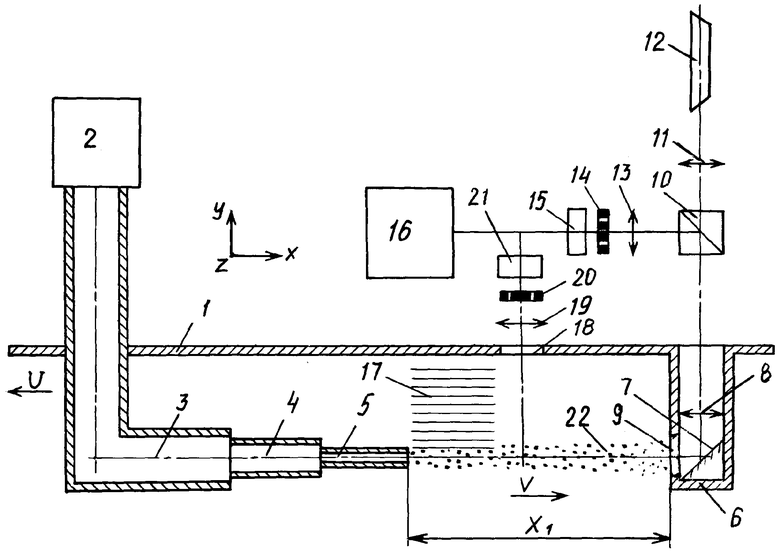
| ОПТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ГИДРОФОН | 2001 |
|
RU2185709C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМНОСТИ ПЛАВСРЕДСТВА С ПОМОЩЬЮ ЛАЗЕРНОГО ГИДРОФОНА | 1999 |
|
RU2167500C1 |
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| US 5175713 A, 29.12.1992 | |||
| US 2003072219 A1, 17.03.2003. | |||

