ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ НАСТОЯЩЕЕ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу оценки сил реакции опоры, действующих на ноги двуногого шагающего тела, например человека или двуногого шагающего робота или аналогичного устройства. Настоящее изобретение дополнительно относится к способу оценки моментов, действующих на суставы ноги двуногого шагающего тела, благодаря использованию вышеуказанных расчетных значений сил реакции опоры.
ПРЕДПОСЫЛКИ ДЛЯ СОЗДАНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Например, для управления работой устройства для содействия ходьбе, предназначенного для содействия человеку при ходьбе или для управления движениями перемещения двуногого шагающего робота, необходимо последовательно определять силы реакции опоры, действующие на ноги человека или двуногого шагающего робота (точнее говоря, силы от опоры, которые действуют на приземляющиеся части ног). Определение сил реакции опоры делает возможным определение моментов или аналогичных воздействий, действующих на суставы ног двуногого шагающего тела, и на основе полученных моментов или аналогичных воздействий определять требуемые вспомогательные силы устройства для содействия ходьбе или требуемые вращающие моменты или аналогичные воздействия для суставов двуногого шагающего робота или аналогичного устройства.
В качестве методики определения сил реакции опоры известна одна, которая описана, например, в публикации №2000-249570 нерассмотренной японской патентной заявки. В соответствии с этой методикой, силу реакции опоры каждой ноги определяют как результирующую величину (линейную комбинацию) множества тригонометрических функций, имеющих взаимно различные периоды, 1/n (n=1, 2,...) цикла ходьбы, поскольку формы волны временного изменения сил реакции опоры каждой ноги периодически изменяются в течение постоянной ходьбы двуногого шагающего тела. В этом случае в весовых коэффициентах тригонометрических функций для комбинирования множества тригонометрических функций используют заданные значения, устанавливаемые заранее для каждого двуногого шагающего тела, или значения, получаемые путем регулировки предварительно установленных заданных значений в соответствии с географическими и геометрическими особенностями местности (в соответствии с топографией).
Однако вышеуказанная методика разработана для определения сил реакции опоры ног для одного шага или множества шагов двуногого шагающего тела. По этой причине трудно точно определить силы реакции опоры, если походка двуногого шагающего тела последовательно изменяется. Кроме того, для увеличения точности определяемых сил реакции опоры должны быть установлены или отрегулированы в соответствии с топологией или аналогичными факторами весовые коэффициенты тригонометрических функций для каждого двуногого шагающего тела. Это затрудняет определение сил реакции опоры благодаря минимизации влияний окружающей среды, которые воздействуют на движение двуногих шагающих тел, или индивидуальных отличий между двуногими шагающими телами.
Известен, например, двуногий шагающий робот, имеющий датчики силы, например шестиосные датчики силы, прикрепленные к лодыжкам или ступням каждой ноги, для определения сил реакции опоры на основе выходных сигналов датчиков силы. Известна другая методика, в соответствии с которой необходимые параметры измеряют благодаря ходьбе двуногого шагающего тела по плите пуансона, установленной на опоре (полу), для определения сил реакции опоры из выходных сигналов плиты пуансона.
Однако в соответствии с методикой, в которой используют датчики силы для определения сил реакции опоры ног человека, в частности датчики силы, приходится крепить датчики силы к лодыжкам и ступням ног, так что датчики силы мешают при ходьбе в обычной среде существования. Методика, в которой используются плиты пуансона, обеспечивают возможность определения сил реакции опоры только в среде, в которой установлена плита пуансона.
Настоящее изобретение было разработано в виду вышеупомянутых недостатков предшествующего уровня техники, и его задачей было обеспечение способа оценки сил реакции опоры, который обеспечивает возможность точного определения сил реакции опоры в реальном масштабе времени с помощью относительно простой методики и который идеально пригоден для определения сил реакции опоры, в частности, человека, как двуногого шагающего тела.
Дополнительной задачей настоящего изобретения является обеспечение способа оценки моментов суставов двуногого шагающего тела, который обеспечивает возможность точного определения в реальном масштабе времени моментов, действующих на суставы, например коленные суставы ног, благодаря использованию расчетных значений силы реакции опоры.
СУЩНОСТЬ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Сначала будет описана основная концепция способа, соответствующего настоящему изобретению, оценки сил реакции опоры двуногого шагающего тела.
Состояния движения ног двуногого шагающего тела (состояния движения ног в течение ходьбы) включают в себя состояние одного положения (касания), в котором только одна нога 2 (передняя нога относительно направления движения на приведенном чертеже) из обеих ног 2 и 2 двуногого шагающего тела 1 находится в контактном взаимодействии с грунтом, как иллюстрируется на фиг.1(а), и состояние двух положений (касания), в котором обе ноги 2,2 находятся в контактном взаимодействии с грунтом, как показано на фиг.1(b).
Если равнодействующая сила реакции, действующая на обе ноги 2 и 2, от опоры А указана ссылочным символом F, то равнодействующая сила F реакции опоры равна силе реакции опоры, действующей на ногу 2, находящуюся в контактном взаимодействии с грунтом, в состоянии одного положения, иллюстрируемых на фиг.1(а), тогда как она является результирующей силой сил Ff и Fr реакции опоры, действующих на обе ноги 2 и 2, соответственно, в состоянии двух положений, иллюстрируемом на фиг.1(b) ((прим. пер.) исправлено в соответствии с прилагаемой инструкцией для осуществления изменений). Если составляющие в направлении оси Х (горизонтальное направление относительно направления движения двуногого шагающего тела 1 ((прим.пер.) исправлено в соответствии с прилагаемой инструкцией для осуществления изменений)) и в направлении оси Z (вертикальное направление) ускорения а центра G0 тяжести двуногого шагающего тела 1 в абсолютной системе Cf координат, зафиксированной относительно грунта, указаны как ах и az, соответственно, а составляющие в направлении оси Х и в направлении оси Z равнодействующей силы F реакции опоры, действующей на двуногое шагающее тело 1, указаны символами Fx и Fz, соответственно, то уравнение движения центра G0 тяжести (точнее говоря, уравнение движения относительно поступательного движения центра G0 тяжести) представляется посредством выражения (1), приведенного ниже.

(где М - масса двуногого шагающего тела, а g - ускорение силы тяжести).
Заключенные в скобки части T(,) на обеих сторонах в уравнении (1) представляют двухкомпонентные векторы. В приведенном описании обозначение в виде T(,) представляет вектор.
Другими словами, уравнение движения центра G0 тяжести является выражением отношения, показывающим, что произведение ускорения а центра G0 тяжести на массу М двуногого шагающего тела 1 равно результирующей силе тяжести, действующей на центр G0 тяжести (=Mg), и равнодействующей силе F реакции опоры.
Таким образом, если определяют ускорение а=T(ах, az) центра G0 тяжести двуногого шагающего тела 1, то расчетное значение силы F=(Fx, Fz) реакции опоры может быть получено с помощью следующего уравнения (2) при использовании ускорения а, величины массы М двуногого шагающего тела 1 и величины ускорения g силы тяжести.

В состоянии одного положения, иллюстрируемом на фиг.1(а), сила реакции опоры, действующая на одну ногу 2, находящуюся в контактном взаимодействии с грунтом, равна вышеупомянутой равнодействующей силе F реакции опоры, так что расчетное значение силы F реакции опоры, действующей на одну ногу 2, будет получено с помощью выражения (2).
В этом случае масса М, необходимая для получения расчетного значения силы F реакции опоры, может быть определена заранее посредством измерения или аналогичным образом. Как будет описано в этой заявке ниже, положение центра G0 тяжести и ускорение а могут быть последовательно определены в соответствии с известными методиками при использовании выходных сигналов датчиков, например датчика для определения углов сгибания (углов поворота) каждого сустава двуногого шагающего тела 1, измерителя ускорения, гиродатчика и так далее.
Между тем, что касается состояния двух положений, иллюстрируемого на фиг.1(b), сила реакции опоры, действующая на ногу 2, находящуюся сзади относительно направления перемещения двуногого шагающего тела 1, выражается как Fr=T(Frx, Frz), тогда как сила реакции опоры, действующая на ногу 2, находящуюся спереди, выражается как Ff=T(Ffx, Ffz). В это время, как будет более подробно описано позднее, в соответствии со знаниями авторов этой заявки составляющие Frx и Frz силы Fr реакции опоры, действующей на заднюю ногу 2, в частности, представляют характеристические изменения, имеющие поразительную корреляцию со временем, прошедшим от начала состояния двух положений, и скоростью движения двуногого шагающего тела 1. Таким образом, получение характеристических данных, представляющих такие характеристики (карты распределения, таблицы данных, выражения приближенных функций или аналогичные данные) благодаря выполнению различных экспериментов, одновременно делает возможным на основе характеристических данных осуществление оценки силы Fr реакции опоры, действующей на заднюю ногу 2. Результирующая сила силы Fr реакции опоры, действующей на заднюю ногу 2, и силы Ff реакции опоры, действующей на переднюю ногу 2, обеспечивает равнодействующую силу F реакции опоры, получаемую с помощью выражения (2). Следовательно, как показано с помощью выражения (3), которое приведено ниже, расчетное значение силы Ff реакции опоры, действующей на переднюю ногу 2, может быть определено путем вычитания расчетного значения силы Fr реакции опоры, действующей на заднюю ногу 2, определенного на основе характеристических данных, описанных выше, из расчетного значения равнодействующей силы F реакции опоры (векторное вычитание).

В соответствии с этим, в состоянии двух положений, если определены скорость движения двуногого шагающего тела 1 и время, прошедшее от начала состояния двух положений, то могут быть определены расчетные значения сил Fr и Ff реакции опоры двух ног 2 при использовании вышеупомянутых измеренных величин и расчетного значения равнодействующей силы F реакции опоры. В этом случае скорость движения двуногого шагающего тела 1 может быть определена, например, путем использования данных измерения или аналогичных данных углов отклонения бедра и голени каждой ноги 2, как будет подробно описано в этой заявке ниже.
На основе объяснения, приведенного выше, теперь будет описано настоящее изобретение. Для решения вышеупомянутых задач предлагается способ оценки сил реакции опоры двуногого шагающего тела, то есть способ оценки сил реакции опоры, действующих на ноги двуногого шагающего тела по отдельности, предусматривает первый этап для определения того, является ли состояние движения ног двуного шагающего тела состоянием одного положения, в котором только одна из ног находится в контактном взаимодействии с грунтом, или состоянием двух положений, в котором обе ноги находятся в контактном взаимодействии с грунтом; второй этап для последовательного определения положения центра тяжести двуногого шагающего тела, в то время как последовательно определяют также ускорения центров тяжести в абсолютной системе координат, зафиксированной относительно грунта, при использовании данных временного ряда положений центров тяжести; третий этап для последовательного определения расчетного значения равнодействующей силы реакции опоры на основе уравнения движения центров тяжести, представленного массой двуногого шагающего тела, ускорением силы тяжести, ускорениями центров тяжести и равнодействующей силы реакции опоры, которая является результирующей силой сил реакции опоры, действующих на соответствующие ноги; четвертый этап для последовательного измерения времени, прошедшего от начала состояния двух положений до его конца, каждый раз, когда начинается состояние двух положений; и пятый этап для измерения скорости движения двуногого шагающего тела, по меньшей мере, перед началом каждого состояния двух положений. Кроме того, способ, соответствующий настоящему изобретению, предусматривает этапы последовательного определения расчетных значений равнодействующей силы реакции опоры, когда двуногое шагающее тело находится в состоянии одного положения, как расчетных значений сил реакции опоры, действующих на одну ногу, находящуюся в контактном взаимодействии с грунтом, и последовательного определения расчетных значений сил реакции опоры, действующих на одну из двух ног, причем одна нога расположена на задней стороне относительно направления перемещения двуногого шагающего тела, на основе характеристических данных, предварительно установленных как показатель характеристик изменений в силе реакции опоры, действующей на вышеуказанную одну ногу, в зависимости от времени состояния двух положений и скорости движения двуногого шагающего тела, и последовательного определения расчетных значений сил реакции опоры, действующих на другую ногу, когда двуногое шагающее тело находится в состоянии двух положений, путем вычитания определенных расчетных значений сил реакции опоры одной ноги из расчетных значений равнодействующей силы реакции опоры.
В соответствии с настоящим изобретением, на третьем этапе расчетные значения равнодействующей силы реакции опоры последовательно определяют (смотри выражение (2)) в соответствии с вышеупомянутым уравнением движения центра тяжести двуного шагающего тела (смотри выражение (1)) на основе значений массы, ускорения силы тяжести и ускорения центра тяжести двуногого шагающего тела. Затем, на первом этапе определяют то, является ли состояние движения ног двуногого шагающего тела состоянием одного положения или состоянием двух положений, и расчетные значения сил реакции опоры определяют с помощью методики, основанной на соответствующих состояниях опоры (поддержки). Точнее говоря, в состоянии одного положения двуногого шагающего тела, расчетное значение равнодействующей силы реакции опоры непосредственно обеспечивает расчетное значение силы реакции опоры, действующей на одну ногу, находящуюся в контактном взаимодействии с грунтом. В это время, сила реакции опоры, действующая на ногу, не находящуюся в контактном взаимодействии с грунтом (на свободную ногу), равна нулю.
В состоянии двух положений двуногого шагающего тела, расчетное значение силы реакции опоры, действующей на одну ногу, расположенную на задней стороне относительно направления перемещения двуногого шагающего тела, определяют на основе вышеупомянутых характеристических данных при использовании данных измерения времени, прошедшего от начала состояния двух положений, и данных измерения скорости движения двуногого шагающего тела. Кроме того, расчетное значение силы реакции опоры, действующей на другую ногу, определяют путем вычитания расчетного значения силы реакции опоры вышеупомянутой одной ноги из расчетного значения равнодействующей силы реакции опоры, определенной на третьем этапе (выполняя векторное вычитание) (смотри выражение (3)).
В соответствии с настоящим изобретением, расчетное значение равнодействующей силы реакции опоры используют для определения силы реакции опоры, действующей на каждую ногу в состоянии одного положения и в состоянии двух положений. Масса двуногого шагающего тела, необходимая для определения расчетного значения равнодействующей силы реакции опоры, может быть получена заранее путем измерения или аналогичным образом. Положения центра тяжести и ускорения двуногого шагающего тела могут быть определены в реальном масштабе времени при использовании выходных сигналов относительно небольших датчиков, которые могут быть просто прикреплены к двуногому шагающему телу, например датчика (потенциометра или аналогичного прибора) для детектирования углов сгибания (углов поворота) каждого сустава двуногого шагающего тела, и измерителя ускорения, гиродатчика и аналогичного датчика. Таким образом, способ оценки реакций опоры в соответствии с настоящим изобретением делает возможным определение сил реакции опоры в реальном масштабе времени с помощью относительно простой методики без необходимости крепления датчиков силы к лодыжкам и ступням двуногого шагающего тела или использование плиты пуансона.
В способе оценки сил реакции опоры, соответствующем настоящему изобретению, характеристическими данными являются, например, данные, определяющие зависимость между отношением силы реакции опоры одной ноги к равнодействующей силе реакции опоры в начале состояния двух положений и отношением прошедшего времени к продолжительности от начала до конца состояния двух положений, длительность состояния двух положений оценивают из измеренного значения скорости движения на основе предварительно установленной корреляции между скоростью движения двуногого шагающего тела и длительностью состояний двух положений, а расчетное значение силы реакции опоры, действующей на одну ногу, последовательно определяют на основе расчетного значения длительности состояния двух положений, измеренного значения прошедшего времени, расчетного значения равнодействующей силы реакции опоры в начале состояния двух положений и характеристических данных.
Точнее говоря, в соответствии со знаниями авторов настоящей заявки, если внимание сфокусировано на зависимости между отношением силы реакции опоры одной ноги (ноги на задней стороне относительно направления перемещения двуногого шагающего робота) к соответствующей равнодействующей силе реакции опоры в начале состояния двух положений и отношением прошедшего времени к длительности от начала до конца состояния двух положений, то отношение сил реакции опоры имеет по существу постоянное изменение по сравнению с отношением прошедшего времени независимо от скорости движения или аналогичного параметра двуногого шагающего тела. Следовательно, характеристические данные могут быть просто установлены путем определения характеристических данных как данных, представляющих зависимость между отношением сил реакции опоры и отношением прошедшего времени, описанных выше.
В этом случае длительность состояния двух положений, которая обеспечивает основу отношения прошедшего времени, изменяется со скоростью движения двуногого шагающего тела. Если скорость движения остается постоянной, то длительность состояния двух положений будет по существу постоянной. В соответствии с этим, установление заранее корреляции между скоростью движения и длительностью состояния двух положений делает возможной правильную оценку длительности состояния двух положений на основе корреляции с измеренным значением скорости движения. Равнодействующую силу реакции опоры, которая обеспечивает основу отношения сил реакции опоры, действующих на одну ногу, оценивают на основе уравнения движения центра тяжести двуногого шагающего тела.
Таким образом, для оценки сил реакции опоры соответствующих ног в состоянии двух положений, как описано выше, характеристические данные устанавливают как данные корреляции между отношением сил реакции опоры одной ноги на основе равнодействующей силы реакции опоры в начале состояния двух положений и отношением прошедшего времени на основе длительности состояния двух положений и расчетного значения длительности состояния двух положений, которое определяют из измеренного значения скорости движения, измеренное значение прошедшего времени состояния двух положений и расчетное значение равнодействующей силы реакции опоры в начале состояния двух положений используют с вышеуказанными характеристическими данными. Это делает возможным правильное определение с высокой точностью расчетного значения силы реакции опоры, действующей на одну ногу.
Силы реакции опоры являются векторными величинами. Таким образом, точнее говоря, отношение силы реакции опоры одной ноги к равнодействующей силе реакции опоры является отношением каждой составляющей силы реакции опоры в некоторой соответствующей системе координат (например, системе координат, зафиксированной относительно опоры, на которой движется двуногое шагающее тело).
Способ оценки реакций опоры, соответствующий настоящему изобретению, предусматривает измерение скорости движения двуногого шагающего тела на пятом этапе, этапы измерения угла отклонения голени под коленным суставом каждой ноги двуногого шагающего тела и угла отклонения бедра между тазобедренным суставом и коленным суставом ноги в начале каждого состояния двух положений, этап вычисления в начале каждого состояния двух положений величины смещения положения нижней концевой части голени ноги относительно тазобедренного сустава ноги, находящейся на задней стороне относительно направления перемещения двуногого шагающего тела, причем смещение имеет место в направлении перемещения двуногого шагающего тела от начала предшествующего состояния двух положений, на основе измеренных значений углов отклонения бедра и голени ноги и предварительно определенных размеров бедра и голени ноги и измерения времени, прошедшего от начала каждого состояния двух положений до следующего состояния двух положений, как прошедшего времени за один шаг. На пятом этапе, каждый раз, как только начинается состояние двух положений, величину смещения, вычисленную в начале, делят на прошедшее за один шаг время от начала предшествующего состояния двух положений до начала настоящего состояния двух положений для определения измеренного значения скорости движения.
Точнее говоря, вычисляют величину смещения в положении нижней концевой части голени ноги относительно тазобедренного сустава ноги (эта нога является ногой, находящейся в контактном взаимодействии с грунтом в состоянии одного положения непосредственно перед началом каждого состояния двух положений), находящейся на задней стороне относительно направления перемещения двуногого шагающего тела в начале каждого состояния двух положений, причем смещение, имеющее место в направлении перемещения двуногого шагающего тела от начала предшествующего состояния двух положений, будет расстоянием, на которое тазобедренный сустав ноги (проксимальная концевая часть ноги) переместился за шаг от начала предшествующего состояния двух положений до начала настоящего состояния двух положений. В соответствии с этим, средняя скорость движения двуногого шагающего тела в течение прошедшего за один шаг времени будет определяться делением вышеуказанной величины смещения на вышеуказанное прошедшее за один шаг время, которое является временем, прошедшим от начала предшествующего состояния двух положений до начала настоящего состояния двух положений. В этом случае величина смещения может быть определена посредством геометрического вычисления при использовании измеренных значений углов отклонения бедра и голени, соответственно, ноги, которая находится на задней стороне, когда начинается состояние двух положений, причем углы отклонения измеряют в начале настоящего и в начале предшествующего состояний двух положений, и данных размеров (точнее говоря длин) бедра и голени. Кроме того, углы отклонения бедра и голени каждой ноги могут быть измерены при использовании датчика для детектирования углов сгибания суставов ног или других датчиков, например измерителя ускорения и гиродатчика.
Таким образом, скорость движения двуногого шагающего тела, которая требуется для определения расчетного значения силы реакции опоры, действующей на каждую ногу в состоянии двух положений, может быть просто измерена без использования большого датчика или аналогичного прибора. Кроме того, измеряемая скорость движения является скоростью движения непосредственно перед началом каждого состояния двух положений, так что достоверность может быть улучшена, фактически обеспечивая возможность получения более высокой точности расчетных значений сил реакций опоры в состоянии двух положений.
Кроме того, способ оценки реакций опоры, соответствующий настоящему изобретению, предусматривает этапы последовательного измерения ускорений в вертикальном направлении нижней части туловища, соседствующей с тазобедренным суставом, причем туловище поддерживается на ногах через промежуточные тазобедренные суставы ног, при этом состояние движения двуногого шагающего тела определяют на первом этапе следующим образом. Его определяют как начало состояния двух положений и конец состояния одного положения, если ускорение в вертикальном направлении нижней части туловища увеличивается до заданного порогового значения или более, тогда как его определяют как конец состояния двух положений и начало состояния одного положения, если расчетное значение силы реакции опоры, действующей на ногу, расположенную на задней стороне относительно направления перемещения двуногого шагающего тела в состоянии двух положений, уменьшается до заданного порогового значения или меньше.
В альтернативном варианте, особенно в отношении определения конца состояния двух положений (начала состояния одного положения), в соответствии с настоящим изобретением для оценки длительности состояния двух положений, как описано выше, состояние движения двуногого шагающего тела может быть определено исходя из того, что состояние двух положений заканчивается, а состояние одного положения начинается, когда измеренное значение прошедшего времени от начала состояния двух положений достигает расчетного значения длительности состояния двух положений.
Точнее говоря, хотя двуногое шагающее тело является движущимся (шагающим), когда состояние движения ноги изменяется от состояния одного положения в состояние двух положений, то ускорение в вертикальном направлении (ускорение направленное вверх) нижней части туловища временно сильно увеличивается, когда свободная нога касается грунта. Это явления, как правило, не имеет место в других состояниях движения ног. Следовательно, сравнение ускорения с заданным пороговым значением (относительно большим пороговым значением) делает возможным точное определение конца состояния одного положения и начало состояния двух положений.
Когда состояния движения ног изменяются от состояния двух положений в состояние одного положения, в этот момент одна нога оставляет опору, а сила реакции опоры, действующая на эту ногу, уменьшается до нуля. Следовательно, сравнение силы реакции опоры, действующей на ногу, с заданным пороговым значением (например, с пороговым значением немного большим нуля) делает возможным правильное определение конца состояния двух положений и начала состояния одного положения. Главным образом, при оценке длительности состояния двух положений, время, прошедшее от начала состояния двух положений, достигает расчетного значения длительности, когда состояние движения ноги изменяется от состояния двух положений на состояние одного положения, таким образом, позволяя точно определять конец состояния двух положений и начало состояния одного положения.
Как описано выше, определение состояния движения ноги делает возможным точно определить то, является ли состояние движения состоянием одного положения или состоянием двух положений. Как результат, можно переключаться при точном хронометрировании между способами вычисления расчетных значений сил реакции опоры, которые отличают состояние одного положения от состояния двух положений, для получения более высокой точности расчетных значений сил реакции опоры. Ускорение в вертикальном направлении нижней части туловища, которое необходимо для определения состояний движения ног, может быть просто определено из выходных сигналов, например, измерителя ускорения, прикрепленного к нижней части туловища.
В случае человека или аналогичной структуры, в которой туловище имеет талию, соединенную с обеими ногами через промежуточные тазобедренные суставы, и грудную клетку, расположенную выше талии, так что она может отклоняться относительно талии, ускорение нижней части в вертикальном направлении туловища, которое необходимо измерить, предпочтительно является ускорением талии в вертикальном направлении.
В способе оценки реакций опоры, соответствующем настоящему изобретению, на вышеуказанном втором этапе могут быть использованы возможные и различные методы определения центра тяжести двуногого шагающего тела. Однако предпочтительно определять положение центра тяжести и ускорение центра тяжести в соответствии со следующим способом.
Этот способ предусматривает этапы последовательного измерения углов отклонения туловища, поддерживаемого на двух ногах через промежуточные тазобедренные суставы соответствующих ног, углов сгибания, по меньшей мере, тазобедренных суставов и коленных суставов соответствующих ног и ускорений заданной опорной точки двуногого шагающего тела в абсолютной системе координат, в котором на втором этапе последовательно на основе угла отклонения туловища, углов сгибания тазобедренных суставов и коленных суставов, модели связи жестких тел, представляющей двуногое шагающее тело в виде узла соединения множества жестких тел, предварительно определенных масс отдельных частей двуногого шагающего тела, которые соответствуют отдельным жестким телам модели связи жестких тел, и предварительно определенных положений центров тяжести частей, соответствующих жестким телам, определяют положения центра тяжести двуногого шагающего тела относительно опорной точки, ускорения центра тяжести относительно опорной точки последовательно определяют на основе данных временного ряда положений центра тяжести, а ускорения центра тяжести в абсолютной системе координат определяют из ускорений центра тяжести относительно опорной точки и ускорений опорной точки в абсолютной системе координат.
При произвольной установке опорной точки в двуногом шагающем теле, положение центра тяжести двуногого шагающего тела относительно опорной точки, в общем, определяется взаимозависимостью положений туловища, бедер от тазобедренных суставов до коленных суставов соответствующих ног и голеней под коленными суставами. Постуральная зависимость может быть определена из данных измерения, полученных посредством измерения углов отклонения туловища и углов сгибания тазобедренных суставов и коленных суставов. Как будет подробно описано ниже, если допускается вышеуказанная модель связи жестких тел (например, модель, допускающая, что верхняя часть (включая туловище) тазобедренных суставов двух ног двуногого шагающего тела, бедра соответствующих ног и голени являются жесткими телами), то положение центра тяжести двуногого шагающего тела относительно опорной точки может быть определено на основе масс частей, соответствующих жестким телам двуногого шагающего тела, положений центров тяжести частей, соответствующих жестким телам в частях, соответствующих жестким телам (точнее говоря, положениям частей, соответствующих жестким телам в системе координат, зафиксированной относительно частей, соответствующих жестким телам), и вышеупомянутой постуральной зависимости. Кроме того, ускорения центра тяжести относительно опорной точки могут быть определены как дифференцированные значения второго порядка положений центра тяжести, полученных из данных временного ряда положений центра тяжести. Следовательно, посредством измерения ускорений опорной точки в абсолютной системе координат заранее, ускорения центра тяжести двуногого шагающего тела в абсолютной системе координат определяют в зависимости от результирующих ускорений ускорений центра тяжести относительно опорной точки и ускорений опорной точки.
С этом случае углы отклонения туловища, необходимые для определения ускорений двуного шагающего тела, могут быть определены из выходных сигналов измерителя ускорения и гиродатчика, прикрепленных к туловищу, и другого датчика, например измерителя угла отклонения, как описано выше, а углы сгибания тазобедренных суставов и коленных суставов соответствующих ног могут быть определены из выходных сигналов датчика, например потенциометра, прикрепленного к соответствующим местам соответствующих суставов. Кроме того, ускорения опорной точки в абсолютной системе координат могут быть получены из выходных сигналов датчика, например, измерителя ускорения, прикрепленного к части, составляющей с опорной точкой одно целое. Кроме того, массы частей, соответствующих жестким телам двуногого шагающего тела, и положения центра тяжести частей, соответствующих жестким телам в частях, соответствующих отдельным жестким телам, могут быть получены заранее посредством измерения или аналогичным образом.
Таким образом, положения центра тяжести и ускорения двуногого шагающего тела могут быть просто определены в реальном масштабе времени без необходимости крепления относительно большого датчика или аналогичного прибора к двуногому шагающему телу.
Опорную точку предпочтительно устанавливают на туловище при определении положений центра тяжести и ускорений двуногого шагающего тела, как описано выше. Это делает возможным крепление датчика, например измерителя ускорения, для измерения ускорений опорной точки в абсолютной системе координат к туловищу, так что число датчиков, прикрепляемых к ногам, может быть уменьшено, делая возможным предотвращение помех ходьбе (шагательному движению) двуногого шагающего тела.
В случае человека или аналогичной структуры, имеющей талию, соединенную с двумя ногами через промежуточные тазобедренные суставы, и грудную клетку, расположенную на талии так, что она может отклоняться относительно талии, углы отклонения туловища, используемые для определения положения центра тяжести, предпочтительно являются углами отклонения талии и грудной клетки, соответственно. Особенно в этом случая модель связи жестких тел предпочтительно является моделью, которая представляет голени под коленными суставами ног двуногого шагающего тела, бедра между коленными суставами и тазобедренными суставами, талию и туловище, содержащее грудную клетку, расположенную на талии, как соответствующие жесткие тела.
При таком строении, если двуногое шагающее тело является человеком, то положения центра тяжести и его ускорения могут быть точно определены, обеспечивая, таким образом, возможность получения более высокой точности расчетных значений сил реакций опоры.
Способ оценки моментов суставов двуногого шагающего тела, соответствующий настоящему изобретению, является способом оценки момента, действующего, по меньшей мере, на один сустав, посредством использования расчетных значений сил реакций опоры, действующих на ноги, последовательно определяемых с помощью способа оценки реакций опоры, соответствующего настоящему изобретению, описанного выше. Способ оценки моментов суставов, соответствующий настоящему изобретению, предусматривает этапы последовательного измерения углов отклонения туловища, поддерживаемого на двух ногах через промежуточные тазобедренные суставы соответствующих ног, углов сгибания, по меньшей мере, тазобедренных суставов и коленных суставов соответствующих ног и ускорения в абсолютной системе координат заданной опорной точки двуногого шагающего тела, последовательного определения углов отклонения частей соответствующих жестких тел двуногого шагающего тела, которые ассоциируются с соответствующими жесткими телами модели связи жестких тел на основе углов отклонения туловища, углов сгибания тазобедренных суставов и коленных суставов ног, а модель связи жестких тел представляет двуногое шагающее тело в виде узла соединения множества жестких тел, последовательного определения положений центров тяжести частей соответствующих жестких тел относительно опорной точки на основе углов отклонения частей, соответствующих жестким телам, предварительно определенных масс отдельных частей двуногого шагающего тела, которые соответствуют отдельным жестким телам модели связи жестких тел, и предварительно определенных положений центров тяжести частей, соответствующих жестким телам в отдельных частях, соответствующих жестким телам, и последовательного определения ускорений центров тяжести частей, соответствующих жестким телам, относительно опорной точки на основе данных временного ряда положений центров тяжести частей, соответствующих жестким телам, последовательного определения ускорений центров тяжести частей, соответствующих жестким телам, в абсолютной системе координат из ускорений центров тяжести частей, соответствующих жестким телам, относительно опорной точки и ускорений опорной точки в абсолютной системе координат, последовательного определения угловых ускорений частей, соответствующих жестким телам, на основе данных временного ряда углов отклонения частей, соответствующих жестким телам, и последовательного определения расчетных положений точек приложения сил реакции опоры ног в двуногом шагающем теле на основе, по меньшей мере, углов отклонения бедер ног как частей, соответствующих жестким телам двуногого шагающего тела, или углов сгибания коленных суставов ног, причем момент, действующий, по меньшей мере, на один сустав ноги двуногого шагающего тела, оценивают на основе обратной динамической модели благодаря использованию расчетных значений сил реакции опоры, расчетных положений точек приложения сил реакции опоры, ускорений центров тяжести частей, соответствующих жестким телам, и угловых ускорений частей, соответствующих жестким телам, в абсолютной системе координат, углов отклонения частей, соответствующих жестким телам, предварительно определенных масс и размеров частей, соответствующих жестким телам, предварительно определенных положений центров тяжести частей, соответствующих жестким телам, в соответствующих частях, соответствующих жестким телам, и предварительно определенных моментов инерции частей, соответствующих жестким телам.
Если, как описано выше, второй этап в способе оценки реакций опоры предусматривает этап измерения угла отклонения туловища, углов сгибания тазобедренных суставов и коленных суставов, соответственно, ног и ускорения опорной точки двуногого шагающего тела в абсолютной системе координат для определения положения центра тяжести и так далее двуногого шагающего тела относительно опорной точки, то нет необходимости измерения их снова. В качестве модели связи жестких тел может быть использована модель связи жестких тел, которая используется для определения положения центра тяжести и так далее двуногого шагающего тела.
В соответствии со способом оценки моментов суставов, соответствующим настоящему изобретению, данные измерения, полученные посредством измерения углов отклонения туловища и углов сгибания тазобедренных суставов и коленных суставов, делают возможным определение углов отклонения частей, соответствующих жестким телам двуногого шагающего тела, включающего в себя туловище, бедра и голени (представляющие взаимную постуральную зависимость среди частей, соответствующих жестким телам). Положения центров тяжести частей, соответствующих жестким телам, относительно опорной точки могут быть определены на основе масс частей, соответствующих жестким телам, положений центров тяжести частей, соответствующих жестким телам, в соответствующих частях, соответствующих жестким телам (точнее говоря, положений частей, соответствующих жестким телам, в системе координат, зафиксированной относительно частей, соответствующих жестким телам), и углов отклонения частей, соответствующих жестким телам. Кроме того, ускорения центра тяжести соответствующих частей, соответствующих жестким телам, относительно опорной точки могут быть определены как дифференцированные значения второго порядка положений центра тяжести, полученные из данных временного ряда положений центра тяжести. Следовательно, посредством измерения ускорений опорной точки в абсолютной системе координат заранее ускорения центров тяжести частей, соответствующих жестким телам двуногого шагающего тела, определяют на основе результирующих ускорений ускорений центров тяжести относительно опорной точки и ускорений опорной точки (ускорение в абсолютной системе координат).
Кроме того, угловые ускорения частей, соответствующих жестким телам, определяют как дифференцированные значения второго порядка углов отклонения, получаемые из данных временного ряда углов отклонения частей, соответствующих жестким телам.
В соответствии со знаниями авторов настоящей заявки, положения точек приложения сил реакции опоры ног в двуногом шагающем теле, например положения точек приложения сил реакции опоры ног относительно лодыжек ног, тесно коррелируются с углами отклонения бедер ног как частей, соответствующих жестким телам двуногого шагающего тела, и углами сгибания коленных суставов ног. Таким образом, расчетные положения точек приложения сил реакции опоры в двуногом шагающем теле могут быть определены на основе, по меньшей мере, углов отклонения бедер ног или углов сгибания коленных суставов.
Как описано выше, когда ускорения центров тяжести частей, соответствующих жестким телам двуногого шагающего тела, угловые скорости частей, соответствующих жестким телам, и расчетные положения точек приложения сил реакции опоры были определены, данные, включающие в себя эти данные и расчетные значения сил реакции опоры, определенные посредством способа оценки реакций опоры, могут быть использованы для оценки моментов, действующих на коленные суставы и тазобедренные суставы ног, на основе общеизвестной, так называемой, обратной динамической модели. Короче говоря, в соответствии со способом, основанным на обратной динамической модели, моменты, действующие на суставы двуногого шагающего тела, которые соответствуют соединениям модели связи жестких тел, определяют по порядку, начиная с ближайшего к точке приложения силы реакции опоры, при использовании уравнения движения, относящегося к поступательному движению центров тяжести частей, соответствующих жестким телам двуногого шагающего тела, и уравнения движения, относящегося к вращательным движениям частей, соответствующих жестким телам (например, вращательным движениям вокруг центров тяжести частей, соответствующих жестким телам). Хотя подробности будут описаны позднее, если, например, каждую ногу считать как узел связи, имеющий бедро и голень в качестве частей, соответствующих жестким телам, то сила (сила реакции сустава), действующая на коленный сустав каждой ноги, может быть определена, благодаря использованию ускорения центра тяжести голени, расчетного значения силы реакции опоры, действующей на ногу, и значения массы голени в уравнении движения, относящегося к поступательному движению центра тяжести голени каждой ноги. Кроме того, момент коленного сустава ноги может быть оценен, благодаря использованию силы реакции сустава на коленном суставе ноги, углового ускорения голени ноги, расчетного положения точки приложения силы реакции опоры ноги, расчетного значения силы реакции опоры ноги, значений данных, относящихся к положению центра тяжести голени в голени, и размера (длины) голени, значения момента инерции и значения угла отклонения голени в уравнении движения, относящегося к вращательному движению голени.
Сила реакции сустава, действующая на тазобедренном суставе ноги, может быть определена благодаря использованию ускорения центра тяжести бедра, силы реакции сустава, действующей на коленном суставе ноги, и значения массы бедра в уравнении движения, относящегося к поступательному движению центра тяжести бедра каждой ноги. Кроме того, момент тазобедренного сустава ноги может быть оценен благодаря использованию сил реакции сустава, действующих на коленном суставе и тазобедренном суставе, соответственно, ноги, углового ускорения бедра ноги, значений данных, относящихся к положению центра тяжести бедра в бедре, и размера (длины) бедра, значения момента инерции бедра и значения угла отклонения бедра в уравнении движения, относящегося к вращательному движению бедра.
В соответствии со способом оценки моментов суставов, соответствующим настоящему изобретению, оценка момента, действующего на сустав ноги при использовании расчетного значения силы реакции опоры, определенного с помощью вышеупомянутого способа оценки силы реакции опоры, соответствующего настоящему изобретению, делает возможной оценку моментов, действующих на суставы ноги без необходимости крепления относительно больших датчиков и аналогичных приборов к двуногому шагающему телу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1(а) и фиг.1(b) - схематические изображения, приведенные для объяснения основного принципа способа оценки реакций опоры, соответствующего настоящему изобретению,
Фиг.2 - схематическая иллюстрация человека как двуногого шагающего тела и конструкции аппарата, установленного на человеке в одном варианте осуществления настоящего изобретения,
Фиг.3 - блок-схема, приведенная для объяснения функций арифметического процессора, смонтированного в аппарате, иллюстрируемом на фиг.2,
Фиг.4 - схема, иллюстрирующая модель связи жестких тел, используемую для обработки данных арифметического процессора, иллюстрируемого на фиг.3,
Фиг.5 - диаграмма, иллюстрирующая корреляцию между составляющей в направлении движения вектора точки приложения силы реакции опоры и углом отклонения бедра в течение нормальной ходьбы,
Фиг.6 - диаграмма, иллюстрирующая корреляцию между составляющей в вертикальном направлении вектора точки приложения силы реакции опоры и углом отклонения бедра в течение нормальной ходьбы,
Фиг.7 - диаграмма, иллюстрирующая корреляцию между составляющей в направлении движения вектора точки приложения силы реакции опоры и углом сгибания коленного сустава при сидении на стуле,
Фиг.8 - диаграмма, иллюстрирующая корреляцию между составляющей в направлении движения вектора точки приложения силы реакции опоры и углом сгибания коленного сустава при вставании со стула,
Фиг.9 - диаграмма, иллюстрирующая корреляцию между составляющей в направлении движения вектора точки приложения силы реакции опоры и углом отклонения бедра при восхождении по лестнице,
Фиг.10 - диаграмма, иллюстрирующая корреляцию между составляющей в направлении движения вектора точки приложения силы реакции опоры и углом отклонения бедра при спуске вниз по лестнице,
Фиг.11 - схема для объяснения обработки данных, выполняемой посредством арифметического процессора, иллюстрируемого на фиг.3,
Фиг.12 - график, иллюстрирующий корреляцию между скоростью движения человека и периодом двух положений,
Фиг.13(а) - график, иллюстрирующий зависимость между временем двух положений и составляющей в вертикальном направлении силы реакции опоры,
Фиг.13(b) - график, иллюстрирующий зависимость между временем двух положений и составляющей в направлении движения силы реакции опоры,
Фиг.14 - схема для объяснения обработки данных, выполняемой посредством арифметического процессора, иллюстрируемого на фиг.3,
Фиг.15 - график, иллюстрирующий изменения, зависимые от времени, расчетного значения силы реакции опоры, определяемой в варианте осуществления настоящего изобретения, и
Фиг.16 - график, иллюстрирующий изменения, зависимые от времени, расчетных значений моментов коленного сустава и тазобедренного сустава, определяемых с помощью варианта осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Вариант осуществления настоящего изобретения будет описан со ссылкой на вышеупомянутые фиг.1 и 2-12.
Настоящий вариант осуществления является вариантом осуществления, для которого способ оценки сил реакции опоры и способ оценки моментов суставов в соответствии с настоящим изобретением применяли для человека, рассматриваемого в качестве двуногого шагающего тела.
Как схематически показано на фиг.2, человек 1 ориентировочно имеет пару ног 2, 2 (левую и правую ногу), туловище 5, образованное из талии 3 и грудной клетки 4, голову 6 и пару рук 7, 7 (левую и правую руку). В туловище талия 3 соединена с ногами 2, 2 через посредство промежуточной пары левого и правого тазобедренных суставов 8, 8 и поддерживается на обеих ногах 2, 2. Грудная клетка 4 туловища 5 расположена на верхней стороне талии 3 с возможностью отклонения по направлению к передней стороне человека 1 относительно талии 3. Руки 7, 7 проходят из обеих верхних правой и левой сторон грудной клетки 4, а голова 6 поддерживается на верхней концевой части грудной клетки 4.
Каждая из ног 2, 2 имеет бедро 9, проходящее от тазобедренного сустава 8, и голень 11, проходящую от периферического конца бедра 9 через посредство коленного сустава 10. Ступня 13 соединена с периферическим концом голени 11 через посредство лодыжки (голеностопного сустава) 12.
В соответствии с настоящим вариантом осуществления изобретения, аппарат, описываемый ниже, установлен на человеке 1 для оценки сил реакции опоры, действующих на ноги 2 человека 1, имеющего вышеописанное строение, а также для оценки моментов, действующих на коленные суставы 10 и тазобедренные суставы 8.
На грудной клетке 4 туловища 5 смонтированы гиродатчик 14 (называемый далее гиродатчиком 14 грудной клетки), который генерирует выходные сигналы, соответствующие угловым скоростям при отклонениях грудной клетки 4, измеритель 15 ускорения (называемый ниже измерителем 15 ускорения грудной клетки в продольном направлении), который генерирует выходные сигналы, соответствующие ускорению грудной клетки 4 в продольном направлении, арифметический процессор 16, содержащий центральный процессор, оперативное запоминающее устройство, постоянное запоминающее устройство и так далее, и батарея 17, служащая в качестве источника питания для арифметического процессора 16 и так далее. В этом случае гиродатчик 14 грудной клетки, измеритель 15 ускорения грудной клетки в продольном направлении, арифметический процессор 16 и батарея 17 размещены в приемном элементе 18, выполненном в виде ранца, который закреплен, например, на грудной клетке 4 посредством ремня или аналогичного крепления, которое не показано, и унитарно прикреплены к грудной клетке 4 через посредство приемного элемента 18.
Точнее говоря, ускорение, представляемое посредством выходных сигналов измерителя 15 ускорения грудной клетки, является ускорением в продольном направлении горизонтальной секции грудной клетки 4 (в направлении, перпендикулярном центральной оси грудной клетки 4). Если человек 1 прямо (вертикально) стоит на плоской площадке, то это ускорение является ускорением в продольном горизонтальном направлении (в направлении оси Х абсолютной системы координат, как иллюстрируется на фиг.2). Если талия 3 или грудная клетка 4 отклоняется от вертикального направления (направления оси Z абсолютной системы координат, как иллюстрируется на фиг.2), то это ускорение является ускорением в направлении, наклонном относительно горизонтального направления на угол отклонения грудной клетки 4 относительно вертикального направления.
Кроме того, гиродатчик 19 (называемый ниже гиродатчиком 19 талии), генерирующий выходные сигналы, соответствующие угловым скоростям при отклонении талии 3, измеритель 20 ускорения (называемый измерителем 20 ускорения талии в продольном направлении), генерирующий выходные сигналы, соответствующие ускорениям талии 3 в продольном направлении, и измеритель 21 ускорения (называемый ниже измерителем 21 ускорения талии в вертикальном направлении), генерирующий выходные сигналы, соответствующие ускорениям талии в вертикальном направлении, смонтированы/закреплены на талии 3 туловища 5 через посредство крепежного средства, например ремня, который не показан.
Так же как в случае измерителя 15 ускорения грудной клетки в продольном направлении, измеритель 20 ускорения талии в продольном направлении, точнее говоря, является датчиком для детектирования ускорений в продольном направлении в горизонтальной секции талии 3 (в направлении, перпендикулярном центральной оси талии 3). Кроме того, измеритель 21 ускорения талии в вертикальном направлении, точнее говоря, является датчиком, предназначенным для детектирования ускорения в вертикальном направлении в направлении центральной оси талии 3 (то есть перпендикулярно ускорению, детектируемому посредством измерителя 20 ускорения талии в продольном направлении). Измеритель 20 ускорения талии в продольном направлении и измеритель 21 ускорения талии в вертикальном направлении могут быть выполнены интегрально как двухосный измеритель ускорения.
На тазобедренном суставе 8 и коленном суставе 10 каждой ноги 2 смонтированы датчик 22 углов тазобедренного сустава и датчик 23 углов коленного сустава, которые генерируют выходные сигналы, соответствующие углам Δθс и Δθd сгибания, соответственно. Что касается датчиков 22 углов тазобедренного сустава, то на фиг.2 показан только датчик 22 углов тазобедренного сустава, относящийся к тазобедренному суставу 8 ноги 2 на этой стороне (правая сторона человека 1 относительно движения вперед). Однако другой датчик 22 углов тазобедренного сустава прикреплен к тазобедренному суставу 8 ноги 2 на другой стороне (левой стороне человека 1 относительно движения вперед) соосно с датчиком 22 углов тазобедренного сустава на этой стороне.
Эти датчики 22 и 23 углов образованы, например, потенциометрами и прикреплены к каждой ноге 2 через посредство, например, ленточного элемента или аналогичных средств, которые не показаны. В этом случае, углы Δθс сгибания, детектируемые посредством каждого датчика 22 углов тазобедренного сустава, точнее говоря, являются углами поворота бедра 9 каждой ноги 2 вокруг тазобедренного сустава 8 (вокруг центральной оси тазобедренного сустава человека 1 в боковом направлении) относительно талии 3, на основе репера, определяемого постуральной зависимостью между талией 3 и бедром 9 каждой ноги 2 (например, постуральной зависимостью, в которой центральная ось талии 3 и центральная ось бедра 9 по существу параллельными, когда человек 1 находится в вертикальном положении). Аналогичным образом, углы Δθd сгибания, детектируемые посредством датчиков 23 углов коленного сустава, являются углами поворота голени 11 вокруг коленного сустава 10 (вокруг центральной оси коленного сустава 10 человека 1 в боковом направлении) относительно бедра 9, на основе репера, определяемого заданной постуральной зависимостью между бедром 9 и голенью 11 каждой ноги 2 (например, постуральной зависимостью, в которой центральная ось бедра 9 и центральная ось голени 11 становятся по существу параллельными друг другу).
Вышеупомянутые датчики 14, 15 и 19-23 соединены с арифметическим процессором 16 посредством сигнальных линий, которые на показаны, для ввода выходных сигналов (датчиков) в арифметический процессор 16.
Как иллюстрируется на фиг.3, арифметический процессор 16 предусмотрен с функциональными средствами. В частности, арифметический процессор 16 предусмотрен со средством 24 для определения движения ноги, которое использует данные, детектируемые посредством измерителя 21 ускорения талии в вертикальном направлении, и данные, получаемые посредством хронометрирующего средства 35 и средства 37 для оценки периода двух положений (касания), которые будут описаны в этой заявке ниже, для того, чтобы определить, является ли состояние движения ног 2, 2 человека состоянием одного положения (состояние, иллюстрируемое на фиг.1(а)) или состоянием двух положений (состояние, иллюстрируемое на фиг.1(b)). Арифметический процессор 16 дополнительно предусмотрен со средством 25 для измерения угла отклонения грудной клетки, которое использует данные детектирования измерителя 15 ускорения грудной клетки в продольном направлении и гиродатчика 14 грудной клетки для измерения угла θа отклонения грудной клетки 4 в абсолютной системе Cf координат (а конкретно, угла θа отклонения относительно, например, вертикального направления; смотри фиг.2), и со средством 26 для измерения углов отклонения талии, которое использует данные детектирования измерителя 20 ускорения талии в продольном направлении и гиродатчика 19 для измерения угла θb отклонения талии 3 в абсолютной системе Cf координат (а конкретно, угла θb отклонения относительно, например, вертикального направления; смотри фиг.2).
Арифметический процессор 16 дополнительно предусмотрен со средством 27 для измерения опорного ускорения, которое использует данные детектирования измерителя 20 ускорения талии в продольном направлении и измерителя 21 ускорения талии в вертикальном направлении и данные угла θb отклонения талии 3, измеренного с помощью средства 26 для измерения угла отклонения талии для определения ускорения (ускорения перемещения) а0=T(а0х, a0z), в абсолютной системе Cf координат при начале 0 координат системы Ср координат тела (координаты xz, как показано на фиг.2), установленном на талии 3, как показано на фиг.2, в качестве опорной точки человека 1 в настоящем варианте осуществления настоящего изобретения. В этом случае, система Ср координат тела является, точнее говоря, системой координат, например, которая имеет среднюю точку линии, соединяющей центры правого и левого тазобедренных суставов 8, 8 человека, определенную как начало 0 координат, причем вертикальное направление определено как направление оси z, a горизонтальное направление человека 1 вперед определено как направлением оси x (система координат, в которой направления трех осей аналогичны направлениям в вышеуказанной абсолютной системе Cf координат).
Арифметический процессор 16 дополнительно предусмотрен со средством 28 для вычисления положения ноги, которое использует данные детектирования датчика 22 углов тазобедренного сустава и датчика 23 углов коленного сустава каждой ноги 2 и данные угла θb отклонения талии 3, полученные с помощью средства 26 для измерения угла отклонения талии, для определения углов θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2 в абсолютной системе Cf координат (например, углов θс и θd отклонения относительно вертикального направления, смотри фиг.2).
Арифметический процессор 16 дополнительно предусмотрен со средством 29, которое вычисляет положение центра тяжести каждой части, которое использует данные угла θа отклонения грудной клетки 4, угла θb отклонения талии 3, угла θс отклонения бедра 9 и угла θd отклонения голени 11 каждой ноги 2, которые получают с помощью средства 25 для измерения угла отклонения грудной клетки, средства 26 для измерения угла отклонения талии и средства 28 для вычисления положения ноги, для определения положений центров тяжести частей, соответствующих жестким телам человека 1, ассоциируемым с моделью связи жестких тел, описываемой в этой заявке ниже (точнее говоря, положения центов тяжести частей, соответствующих жестким телам в системе Ср координат тела), со средством 30 для вычисления положения центра тяжести тела, которое использует данные положений центров тяжести частей, соответствующих жестким телам, для определения положения центра G0 тяжести тела всего человека 1 в системе Ср координат тела (называемого ниже в этой заявке "центром G0 тяжести тела, смотри фиг.1), и со средством 31 для вычисления ускорения центра тяжести тела, которое использует данные положения центра G0 тяжести тела и данные ускорения а0 в начале 0 координат системы Ср координат тела, полученные с помощью средства 27 для измерения опорного ускорения, для определения ускорения а0=T(а0x, a0z) центра G0 тяжести тела в абсолютной системе Cf координат.
Арифметический процессор 16 дополнительно предусмотрен со средством 32, которое вычисляет ускорение каждой части ноги, которое использует данные положений центров тяжести частей, соответствующих жестким телам человека 1 (точнее говоря, положений центров тяжести частей, соответствующих жестким телам, относящимся к ногам 2), с помощью средства 29, которое вычисляет положение центра тяжести каждой части, и данные ускорения а0 в начале 0 координат системы Ср координат тела, полученные с помощью средства 27 для измерения опорного ускорения, для определения ускорений (ускорений перемещения) центров тяжести бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат, со средством 33, которое вычисляет угловое ускорение каждой части ноги, которое использует данные углов θс и θd отклонения бедра 9 и голени 11 каждой ноги 2, соответственно, полученные с помощью средства 28 для вычисления положения ноги, для определения угловых ускорений бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат, и со средством 34 для оценки точки приложения силы реакции опоры, которое использует данные угла θс отклонения бедра 9 каждой ноги 2, полученные с помощью средства 28 для вычисления положения ноги, и угла Δθd сгибания коленного сустава 10, измеряемого посредством датчика 23 угла коленного сустава, для оценки положения точки приложения силы реакции опоры каждой ноги 2, находящейся в контактном взаимодействии с грунтом.
Арифметический процессор 16 дополнительно предусмотрен с хронометрирующим средством 35, которое измеряет время, прошедшее от начала состояния двух положений, причем каждый раз начало состояния двух положений (конец состояния одного положения) определяют с помощью средства 24 для определения движения ноги, со средством 36 для оценки скорости движения, которое использует данные углов θс и θd отклонения бедра 9 и голени 11 каждой ноги 2, соответственно, получаемые с помощью средства 28 для вычисления положения ноги и данных хронометрирования, получаемых с помощью хронометрирующего средства 35, для оценки скорости движения человека 1, каждый раз при определении начала состояния двух положений (конца состояния одного положения) с помощью средства 24 для определения движения ноги, и со средством 37 для оценки периода двух положений для оценки времени от начала до конца состояния двух положений (для оценки длительности состояния двух положений, называемой в этой заявке ниже как "период двух положений") из данных скорости движения, определяемых с помощью средства 36 для оценки скорости движения.
Арифметический процессор 16 дополнительно оборудован средством 38 для оценки силы реакции опоры, которое определяет расчетное значение силы реакции опоры, действующей на каждую ногу 2, посредством использования данных ускорения а центра тяжести тела, получаемых с помощью средства 31 для вычисления ускорения центра тяжести тела, данных расчетного значения периода двух положений, получаемых с помощью средства 37 для оценки периода двух положений, данных хронометрирования, получаемых с помощью хронометрирующего средства 35, и данных результата определения состояния движения ноги 2, получаемых с помощью средства 24 для определения движения ноги, и средством 39 для оценки момента сустава, предназначенным для оценки моментов, действующих на коленный сустав 10 и тазобедренный сустав 8 каждой ноги 2, посредством использования этих данных расчетного значения силы реакции опоры, данных ускорений центров тяжести бедра 9 и голени 11 каждой ноги 2, получаемых с помощью средства 32, которое вычисляет ускорение каждой части ноги, данных угловых ускорений бедра 9 и голени 11 каждой ноги 2, получаемых с помощью средства 33, которое вычисляет угловое ускорение каждой части ноги, данных расчетного положения точки приложения силы реакции опоры, получаемых с помощью средства 34 для оценки точки приложения силы реакции опоры, и данных углов θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2, получаемых с помощью средства 28 для вычисления положения ноги.
Работа варианта осуществления настоящего изобретения будет объяснена в сочетании с более детальным описанием обработки данных каждым средством вышеупомянутого арифметического процессора 16.
В настоящем варианте осуществления изобретения, например, при движении человека 1 пешком, если выключатель электропитания, который не показан, арифметического процессора 16 включен в то время, как обе ноги 2 находятся в контактном взаимодействии с опорой, то арифметический процессор 16 последовательно выполняет обработку данных в заданное время цикла, как объяснено ниже, для последовательного определения расчетных значений и так далее, действующих на каждую ногу 2.
Сначала арифметический процессор 16 выполняет обработку данных, получаемых с помощью средства 25 для измерения угла отклонения грудной клетки и средства 26 для измерения угла отклонения талии. В этом случае при обработке данных средства 25 для измерения угла отклонения грудной клетки последовательно определяется угол θа отклонения грудной клетки 4 в абсолютной системе Cf координат в каждое время цикла, упомянутого выше, с помощью общеизвестной методики, основанной на так называемой обработке данных фильтра Кальмана, при использовании ускорений грудной клетки 4 в продольном направлении, получаемых от измерителя 15 ускорения грудной клетки в продольном направлении и гиродатчика 14 грудной клетки, и данных детектирования угловой скорости грудной клетки 4. Аналогичным образом, при обработке данных средства 26 для измерения угла отклонения талии последовательно определяется угол θb отклонения талии 3 в абсолютной системе Cf координат посредством обработки данных фильтра Кальмана при использовании ускорений талии 3 в продольном направлении, получаемых посредством измерителя 20 ускорения талии в продольном направлении и гиродатчика 19 талии, и данных детектирования угловой скорости талии 3. В этом случае углы θа и θb отклонения грудной клетки 4 и талии 3, соответственно, в абсолютной системе Cf координат означают углы отклонения, например, относительно вертикального направления (направления действия силы тяжести) в настоящем варианте осуществления.
Углы отклонения грудной клетки 4 и талии 3 могут быть, например, альтернативно определены посредством интегрирования данных детектирования угловых скоростей, получаемых посредством гиродатчиков 14 и 19. Однако выполнение обработки данных фильтра Кальмана, как в настоящем варианте осуществления изобретения, позволяет измерять углы θа и θb отклонения грудной клетки 4 и талии 3, соответственно, с большой точностью.
Затем арифметический процессор 16 выполняет обработку данных, получаемых с помощью средства 28 для вычисления положения ноги, и обработку данных, получаемых с помощью средства 27 для измерения опорного ускорения.
При обработке данных, выполняемой с помощью средства 28 для вычисления положения ноги, углы θс и θd отклонения (углы отклонения относительно вертикального направления, см. фиг.2) бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат определяют в каждое время цикла, как описано ниже. Угол θс отклонения бедра каждой ноги 2 вычисляют в соответствии с выражением (4), приведенным ниже, на основе текущего значения данных детектирования угла Δθс сгибания тазобедренного сустава 8 посредством датчика 22 углов тазобедренного сустава, прикрепленного к ноге 2, и текущего значения угла θb отклонения талии 3, определяемого с помощью средства 25 для измерения угла отклонения талии:

где угол θb отклонения талии 3 принимает отрицательное значение, если талия 3 отклоняется относительно вертикального направления так, что верхняя концевая часть тали 3 выступает дальше от передней стороны человека, чем его нижняя концевая часть; а угол Δθс сгибания тазобедренного сустава 8 принимает положительное значение, если бедро 9 отклоняется относительно центральной оси талии 3 так, что нижняя концевая часть бедра 9 выступает в передней стороне человека 1.
Кроме того, угол θd отклонения голени 11 каждой ноги 2 вычисляют в соответствии с выражением (5), приводимым ниже, на основе текущего значения угла θс отклонения бедра 9, определяемого, как описано выше, и текущего значения данных детектирования угла Δθd сгибания коленного сустава 10, получаемых посредством датчика 23 углов коленного сустава, прикрепленного к ноге 2:

где угол сгибания коленного сустава 10 принимает положительное значение, если голень 11 отклоняется к задней стороне бедра 9 относительно центральной оси бедра 9.
При обработке данных с помощью средства 27 для измерения опорного ускорения, ускорение а0=T(а0x, а0z) начала 0 координат вышеупомянутой системы Ср координат тела в абсолютной системе Cf координат определяют так, как это описано ниже. Если текущее значение данных детектирования ускорения талии 3 в продольном направлении, получаемых посредством вышеупомянутого измерителя 20 ускорения талии в продольном направлении, равно ар, а текущее значение данных детектирования ускорения талии 3 в вертикальном направлении, получаемых посредством измерителя 21 ускорения талии в вертикальном направлении, равно aq, то ускорение а0=T(а0х, a0z) в абсолютной системе Cf координат определяют с помощью выражения (6), приводимого ниже, из данных детектирования ар и aq и текущего значения угла θb отклонения талии 3, получаемого с помощью вышеупомянутого средства 26 для измерения угла отклонения талии:

После этого арифметический процессор 16 выполняет обработку данных, получаемых средством 29, которое вычисляет положение центра тяжести каждой части для определения положения центра тяжести каждой части, соответствующей жесткому телу человека 1 в системе Ср координат тела (положение относительно начала 0 координат системы Ср координат тела) при использовании модели связи жестких тел, описываемой ниже.
Как показано на фиг.4, модель R связи жестких тел, используемая в настоящем варианте осуществления, является моделью, которая представляет человека 1 посредством соединения жестких тел R1, R1, соответствующих бедрам 9 соответствующих ног 2, жестких тел R2, R2, соответствующих голеням 11, жесткого тела R3, соответствующего талии 3, и жесткого тела R4, соответствующего части 40, комбинирующей грудную клетку 4, руки 7, 7 и голову 6 (называемой ниже "туловищем 40"). В этом случае, соединение жестких тел R1 и жесткого тела R3 и соединение жестких тел R1 и жестких тел R2 соответствуют тазобедренному суставу 8 и коленному суставу 10, соответственно. Соединение жесткого тела R3 и жесткого тела R4 обеспечивает опорную точку 41 отклонения грудной клетки 4 относительно талии 3.
В настоящем варианте осуществления изобретения положения центров G1, G2, G3 и G4 тяжести частей, соответствующих жестки телам (бедрам 9 и голеням 11 соответствующих ног 2, талии 3 и туловищу 40) человека 1, ассоциируемого с жесткими телами R1-R4 модели R связи жестких тел в соответствующих частях соответствующих жестких тел, записывают заранее и сохраняют в запоминающем устройстве, которое не показано, арифметического процессора 16.
Положения центров G1, G2, G3 и G4 тяжести частей соответствующих жестких тел, которые записываются/сохраняются в арифметическом процессоре 16, являются положениями в системе координат, которая зафиксирована для частей, соответствующих жестким телам. В этом случае в качестве примеров данных, представляющих каждое из положений центров G1, G2, G3 и G4 тяжести частей соответствующих жестких тел, используют расстояния в аксиальных направлениях соответствующих частей, соответствующих жестким телам, от центральных точек суставов (соединений) на одном конце каждой из соответствующих частей, соответствующих жестких тел. Точнее говоря, например, положение центра G1 тяжести каждого бедра 9 указано как положение на расстоянии d1 в аксиальном направлении бедра 9 от центра тазобедренного сустава 8 бедра 9, положение центра G2 тяжести каждой голени 11 указано как положение на расстоянии d2 в аксиальном направлении голени 11 от центра коленного сустава 10 голени 11, как показано на фиг.4. Значения этих расстояний d1 и d2 определяют заранее и записывают/сохраняют в арифметическом процессоре 16. Это также относится к положениям центров G3, G4 тяжести других частей соответствующих жестких тел.
Строго говоря, на положение центра G4 тяжести туловища 40 оказывают влияние движения рук 7 и 7, входящих в состав тела 40. При ходьбе руки 7, 7, в общем, позиционируются симметрично относительно центральной оси грудной клетки 4, так что положение центра G4 тяжести туловища 40 вряд ли изменяется и по существу соответствует, например, положению центра G4 тяжести туловища 40 в состоянии прямого (вертикального) положения.
В соответствии с вариантом осуществления настоящего изобретения, помимо данных, характеризующих положения центров G1, G2, G3, G4 тяжести частей, соответствующих жестким телам (бедрам 9 и голеням 11 ног 2, талии 3 и туловищу 40), данные масс частей, соответствующих жестким телам, и данные размеров частей, соответствующих жестким телам (например, данные длин частей, соответствующих жестким телам), записывают заранее и сохраняют в арифметическом процессоре 16.
Масса голени 11 содержит массу стопы 13. Как описано выше, данные для записи и сохранения в арифметическом процессоре 16 могут быть определены заранее посредством фактического измерения или аналогичным образом или могут быть оценены на основе средних статистических данных человека из высоты и массы человека 1. В общем, положения центров G1, G2, G3, G4 тяжести, массы и размеры частей, соответствующих жестким телам, коррелированы с высотой и массой человека. На основе данных корреляции и исходя из высоты и массы человека с относительно высокой точностью могут быть оценены положения центров G1, G2, G3, G4 тяжести, массы и размеры частей, соответствующих жестким телам.
Средство 29, которое вычисляет положение центра тяжести каждой части, использует данные, записываемые и сохраняемые заранее в арифметическом процессоре 16, как описано выше, текущие значения угла θа отклонения грудной клетки 4 (= углу отклонения туловища 40) и угла θb отклонения талии 3, определенные с помощью средства 25 для измерения угла отклонения грудной клетки и средства 26 для измерения угла отклонения талии, соответственно, и текущие значения углов θс и θd отклонения бедра 9 и голени 11 каждой ноги 2, соответственно, определенные с помощью средства 28 для вычисления положения ноги, для определения положений центров G1, G2, G3, G4 тяжести частей, соответствующих жестким телам в системе Ср координат тела (на фиг.4 показана координата xz), имеющей начало 0 координат, зафиксированное на талии 3.
В этом случае, поскольку углы θa-θd отклонения частей, соответствующих жестким телам (бедрам 9 и голеням 11 ног 2, талии 3 и туловищу 40), были определены, как описано выше, положения частей, соответствующих жестким телам в системе Ср координат тела, получают из данных вышеупомянутых углов θa-θd отклонения и данных о размерах частей, соответствующих жестким телам. Таким образом, могут быть определены положения центров G1, G2, G3, G4 тяжести частей, соответствующих жестким телам в системе Ср координат тела.
Говоря более строго, как следует, например, из фиг.4, что касается ноги 2, позиционируемой на левой стороне фиг.4 (нога 2, расположенная сзади в направлении перемещения человека), то углом отклонения бедра 9 в системе Ср координат тела (угол отклонения относительно направления оси z) является угол θс (в этом случае θс<0, как следует из фиг.4). Следовательно, координата положения центра G1 тяжести бедра 9 в системе Ср координат тела составляет (d1·sinθc, -d1·cosθc). Углом отклонения голени 11 в системе Ср координат тела является угол θd (θd<0, как следует из фиг.4); следовательно, если длина бедра 9 соответствует Dc, то координата положения центра G2 тяжести голени 11 в системе Ср координат тела будет составлять (Dc·sinθc+d2·sinθd, -Dc·cosθc-d2·cosθd). Центры тяжести бедра 9 и голени 11 другой ноги 2 и талии и туловища 40 определяют аналогичным способом, как описано выше.
После определения положений центров G1, G2, G3, G4 тяжести частей, соответствующих жестким телам, в системе Ср координат тела с помощью средства 29, которое вычисляет положение центра тяжести каждой части, арифметический процессор 16 выполняет обработку данных с помощью средства 30 для вычисления положения центра тяжести тела для определения положения (xg, zg) центра G0 тяжести тела человека 1 в системе Ср координат тела при использовании данных о положениях центров G1, G2, G3, G4 тяжести частей, соответствующих жестким телам, и данные масс частей, соответствующих жестким телам.
Если положение центра G3 тяжести и масса талии 3 в системе Ср координат тела указаны ссылочными символами (х3, z3) и m3, соответственно, положение центра G4 тяжести и масса туловища 40 указаны ссылочными символами (х4, z4) и m4, соответственно, положение центра G1 тяжести и масса бедра 9 ноги 2, которая расположена слева относительно направления движения человека 1, указаны ссылочными символами (x1L, z1L) и m1L, соответственно, положение центра G2 тяжести и масса голени 11 ноги 2 указаны ссылочными символами (x2L, z2L) и m2L, соответственно, положение центра G1 тяжести и масса бедра 9 ноги 2 справа указаны ссылочными символами (x1R, z1R) и m1R, соответственно, положение центра G2 тяжести и масса голени 11 ноги 2 указаны ссылочными символами (x2R, z2R) и m2R, соответственно, а масса человека 1 указана ссылочным символом М (=m1L+m2L+m1R+m2R+m3+m4), то положение (xz, zg) центра тяжести тела человека 1 в системе Ср координат тела определяется из выражения (7), приведенного ниже.

После выполнения обработки данных с помощью средства 30 для вычисления положения центра тяжести тела арифметический процессор 16 дополнительно выполняет обработку данных с помощью средства 31 для вычисления ускорения центра тяжести тела. При обработке данных с помощью средства 31 для вычисления ускорения центра тяжести тела сначала определяют дифференцированное значение второго порядка положения (xg, zg) центра G0 тяжести тела относительно начала 0 координат в системе Ср координат тела, то есть ускорение T(d2xg/dt2, d2zg/dt2) центра G0 тяжести тела в системе Ср координат тела, при использовании данных временного ряда положения (xg, zg) центра G0 тяжести тела в системе Ср координат тела, полученных с помощью средства 30 для вычисления положения центра тяжести тела для каждого времени цикла, упомянутого выше. В таком случае, определяют векторную сумму ускорения T(d2xg/dt2, d2zg/dt2) и ускорения а0=T(а0х, a0z) в абсолютной системе Cf координат начала 0 координат системы Ср координат тела, определенного с помощью средства 27 для измерения опорного ускорения, для определения ускорения а=T(ах, az) центра G0 тяжести тела в абсолютной системе Cf координат.
После выполнения обработки данных с помощью средства 28 для вычисления положения ноги и средства 29, которое вычисляет положение центра тяжести каждой части, арифметический процессор 16 дополнительно выполняет обработку данных с помощью средства 32, которое вычисляет ускорение каждой части ноги, средства 33, которое вычисляет угловое ускорение каждой части ноги, и средства 34 для оценки точки приложения силы реакции опоры.
В этом случае, как при обработке данных с помощью средства 31 для вычисления ускорения центра тяжести тела, обработка данных с помощью средства 32, которое вычисляет ускорение каждой части ноги, сначала использует данные временного ряда положений центров G1 и G2 тяжести бедра 9 и голени 11 соответственно, которые являются положениями, соответствующими жестким телам каждой ноги 2 в системе Ср координат тела, определенными с помощью средства 29, которое вычисляет положение центра тяжести каждой части для каждого времени цикла, упомянутого выше, чтобы в соответствии с этим определить дифференцированные значения второго порядка положений центров G1 и G2 тяжести бедра 9 и голени 11, соответственно, в системе Ср координат тела, то есть ускорения центров G1 и G2 тяжести бедра 9 и голени 11, соответственно, в системе Ср координат тела (поступательные ускорения относительно начала 0 координат системы Ср координат тела). В таком случае векторная сумма соответствующих ускорений и ускорения а0=T(а0х, a0z) в абсолютной системе Cf координат начала 0 координат системы Ср координат тела определяется с помощью средства 27 для измерения опорного ускорения так, чтобы определить ускорения бедра 9 и голени 11, соответственно, в абсолютной системе Cf координат (точнее говоря, координатных составляющих ускорений в абсолютной системе Cf координат).
Кроме того, при обработке данных с помощью средства 33, которое вычисляет угловое ускорение каждой части ноги, данные временного ряда углов θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2, полученные с помощью средства 28 для вычисления положения ноги для каждого времени цикла, используют для определения дифференцированных значений второго уровня углов θс и θd отклонения бедра 9 и голени 11 соответственно, то есть угловые ускорения бедра 9 и голени 11 соответственно.
При обработке данных с помощью средства 34 для оценки точки приложения силы реакции опоры, относящихся к ноге 2, находящейся в контактном взаимодействии с грунтом, вектор (позиционный вектор точки силы реакции опоры, прикладываемой к лодыжке 12; этот вектор далее будет называться "вектором точки приложения силы реакции опоры") в точке приложения силы реакции опоры стопы 13 ноги 2 от лодыжки 12 ноги 2 (точка, в которой можно считать, что сконцентрированы все силы реакции опоры, действующие на место, где стопа 13 находится в контактном взаимодействии с грунтом) определяют как данные, указывающие на положение точки приложения силы реакции опоры на основе предварительно установленной корреляции, иллюстрируемой на фиг.5 и 6, например, из текущего значения угла θс отклонения бедра 9, вычисляемого с помощью средства 28 для вычисления положения ноги.
Точнее говоря, в соответствии со знаниями авторов этой заявки, угол θс отклонения бедра 9 ноги 2, вошедшей в контактное взаимодействие с грунтом, или угол Δθd сгибания коленного сустава 10 имеют относительно большую корреляцию с точкой приложения силы реакции опоры. Например, вектор точки приложения силы реакции опоры, в частности, составляющая вектора точки приложения силы реакции опоры в направлении движения вперед (направление оси x) человека 1 и составляющая вектора точки приложения силы реакции опоры в вертикальном направлении (направление оси z), изменяется в зависимости, например, от угла θс отклонения бедра 9, как показано на фиг.5 и 6. В этом случае отрицательный угол θс отклонения бедра 9 является углом, получаемым, если бедро 9 отклонено относительно центральной оси талии 3 так, что нога 2 проходит к тыльной стороне человека 1 (например, правая нога 2, если смотреть в направлении движения человека 1 вперед, как иллюстрируется на фиг.2). Положительный угол θс является углом, получаемым, если бедро 9 отклоняется относительно центральной оси талии 3 так, что нога 2 находится на передней стороне человека 1 (например, левая нога 2, если смотреть в направлении движения человека 1, как показано на фиг.2).
В соответствии с настоящим вариантом осуществления получают приближенное выражение, которое представляет корреляции, иллюстрируемые на фиг.5 и 6, и использует угол θс отклонения бедра 9 в качестве параметра, это приближенное выражение записывают/сохраняют заранее в арифметическом процессоре 16. При обработке данных с помощью средства 34 для оценки точки приложения силы реакции опоры текущее значение угла θс отклонения бедра 9, полученное с помощью средства 28 для вычисления положения ноги, подставляют в приближенное выражение, чтобы в соответствии с этим определить вектор точки приложения силы реакции опоры (точнее говоря, составляющие вектора точки приложения силы реакции опоры в направлении оси x и в направлении оси z).
Как показано на фиг.5 и 6, корреляция, в которой угол θс отклонения бедра 9 имеет крайне невысокое значение, величина вектора точки приложения силы реакции опоры отличается между стадией уменьшения угла θс отклонения и стадией его увеличения даже при одинаковом угле θс отклонения бедра. По этой причине в соответствии с настоящим вариантом осуществления для получения вышеупомянутого приближенного выражения, переход корреляции от момента касания пятки ступни 13 опоры до момента отрыва кончиков пальцев ноги от опоры делят на первую фазу, в которой угол θс отклонения бедра 9 является положительным (фазу, указанную на фиг.5 ссылочным символом а1, или фазу b1, показанную на фиг.6), вторую фазу, в которой угол θс отклонения бедра 9 является отрицательным, и скорость изменения угла θс отклонения бедра 9, то есть угловая скорость отклонения бедра 9, является отрицательной (фазу, указанную на фиг.5 ссылочным символом а2, или фазу, указанную на фиг.6 ссылочным символом b2), и третью фазу, в которой угол θс отклонения бедра 9 является отрицательным, а угловая скорость отклонения бедра 9 положительной (фазу, указанную на фиг.5 ссылочным символом а3, или фазу, указанную на фиг.6 ссылочным символом b3), соответствующие фазы аппроксимируются на составляющую в направлении оси x и составляющую в направлении оси z, соответственно, вектора точки приложения силы реакции опоры при использовании аналогичной функции или других функций. Приближенное выражение для фазы, которая комбинирует первую и вторую фазы а1 и а2 соответственно, в корреляции, иллюстрируемой на фиг.5, представлено, например, полиномиальными функциями шестого порядка (где x1-x2 принимают постоянные значения), представленными ниже, когда составляющая в направлении оси x вектора точки приложения силы реакции опоры указана ссылочным символом Px:
Рх=x1·θс6+x2·θс5+x3·θс4+x4·θс3+x5·θс2+x6·θс+x7
Приближенное выражение для третьей фазы а3 в корреляции, иллюстрируемой на фиг.5, представлен, например, полиномиальной функцией четвертого порядка (где x8-x12 принимают постоянные значения), как показано ниже
Px=x8·θс4+x9·θс3+x10·θс2+x11·θс+x12
Приближенное выражение для фазы, которая комбинирует первую и вторую фазы b1 и b2, соответственно, в корреляции, иллюстрируемой на фиг.6, представлено, например, полиномиальными функциями шестого порядка (где z1-z2 принимают постоянное значение), приведенными ниже, если составляющая в направлении оси z вектора точки приложения силы реакции опоры указана ссылочными символами Pz:
Pz=z1·θс6+z2·θс5+z3·θс4+z4·θс3+z5·θс2+z6·θс+z7
Приближенное выражение для третьей фазы b3 в корреляции, иллюстрируемой на фиг.6, представлено, например, полиномиальными функциями третьего порядка (где z8-z11 принимают постоянные значения), как показано ниже
Pz=z8·θс3+z9·θс2+z10·θс+z11
При определении вектора точки приложения силы реакции опоры идентифицируют, является ли угол θс отклонения бедра 9 положительным или отрицательным, и также идентифицируют, является ли угловая скорость отклонения бедра 9, вычисляемая посредством дифференцирования первого порядка данных временного ряда угла θс отклонения бедра 9, положительной или отрицательной. Кроме того, определяется, какая фаза имеет в настоящее время положительный или отрицательный угол θс отклонения и положительную или отрицательную угловую скорость отклонения, которые были идентифицированы, и текущее значение угла θс отклонения бедра 9 подставляют в приближенное выражение для идентифицированной фазы для вычисления вектора точки приложения силы реакции опоры. Это делает возможным расчетным путем определить различие между величиной вектора точки приложения силы реакции опоры в процессе уменьшения угла θс отклонения бедра 9 и величиной вектора точки приложения силы реакции опоры в процессе его увеличения.
В настоящем варианте осуществления корреляцию между углом θс отклонения бедра 9 ноги 2 и вектором точки приложения силы реакции опоры аппроксимируют с помощью полиномиальных уравнений для определения векторов точки приложения силы реакции опоры. Однако в альтернативном варианте осуществления также представляется возможной запись и сохранение корреляций, иллюстрируемых на фиг.5 и 6, заранее в виде таблиц данных для определения векторов точки приложения силы реакции опоры из угла θс отклонения бедра 9 при использовании таблиц данных.
Положения точек приложения силы реакции опоры также коррелируются с углами сгибания коленного сустава 10 ноги 2, находящейся в контактном взаимодействии с грунтом, так что положение точки приложения силы реакции опоры может быть в альтернативном варианте определено из угла Δθd сгибания коленного сустава 10, измеряемого посредством датчика 23 углов коленного сустава, вместо угла θс отклонения бедра 9. В другом альтернативном варианте осуществления положение точки приложения силы реакции опоры может быть оценено с помощью карты или аналогичным образом при использовании как угла θс отклонения бедра 9, так и угла Δθd сгибания коленного сустава 10.
Если человек 1 сидит на стуле или встает со стула из сидячего положения, то корреляция, иллюстрируемая на фиг.7 (при сидении на стуле) или на фиг.8 (при вставании со стула), сохраняется между положениями точек приложения силы реакции опоры и углом Δθd сгибания коленного сустава 10. При подъеме или спуске человека 1 по лестнице корреляции, иллюстрируемые на фиг.9 (при подъеме по лестнице) и на фиг.10 (при опускании по лестнице), сохраняются между положениями точек приложения силы реакции опоры и углами θс отклонения бедра 9. Таким образом, при сидении человека 1 на стуле или его вставании со стула, может быть оценено положение точки приложения силы реакции опоры из угла Δθd сгибания коленного сустава 10 на основе корреляции, иллюстрируемой на фиг.7 и 8. При подъеме человека 1 по лестнице или его опускании по лестнице, положение точки приложения силы реакции опоры может быть оценено из углов θс отклонения бедра 9 на основе корреляции, иллюстрируемой на фиг.9 и 10.
Между тем, одновременно с обработкой данных с помощью вышеупомянутых средств 25-34, арифметический процессор 16 выполняет обработку данных с помощью средства 24 для определения движения ноги. При обработке данных с помощью средства 24 для определения движения ноги для каждого времени цикла, данные детектирования увеличивающихся ускорений талии 3, получаемые посредством измерителя 21 ускорения талии в вертикальном направлении, сравнивают с заданным пороговым значением, которое устанавливают заранее. В таком случае, если детектируемое значение ускорения превышает пороговое значение, то определяется, что начинается состояние двух положений, иллюстрируемое на фиг.1(b), и заканчивается состояние одного положения, иллюстрируемое на фиг.1(а). Точнее говоря, во время ходьбы человека 1, когда состояние одного положения сменяется состоянием двух положений, нога 2 на стороне свободной ноги, касающейся опоры, вызывает относительно большое ускорение (которое не может генерироваться в нормальном состоянии одного положения), генерируемое по существу направленным вверх в талии 3 в окрестности тазобедренного сустава 8. По этой причине средство 24 для определения движения ноги сравнивает данные детектирования ускорений, направленных вверх, талии 3, определяемых посредством измерителя 21 ускорения талии в вертикальном направлении, с заданным пороговым значением для определения начала состояния двух положений и конца состояния одного положения, как описано выше.
Если с помощью средства 24 для определения движения ноги обнаружено, что началось состояние двух положений, то хронометрирующее средство 24 начинает измерять время, прошедшее от момента начала состояния двух положений (время цикла в момент, когда данные детектирования ускорения посредством измерителя 21 ускорения талии в вертикальном направлении превышают вышеуказанное пороговое значение).
Кроме того, когда определяется начало состояния двух положений, как упоминается выше, обработка данных с помощью средства 24 для определения движения ноги последовательно контролирует время каждого цикла, упомянутое выше, истекло ли время, измеряемое с помощью хронометрирующего средства 35 ((прим.пер.) исправлено в соответствии с прилагаемой инструкцией для осуществления изменений), от момента, когда начавшееся состояние двух положений достигло расчетного значения периода двух положений (длительность состояния двух положений от начала до конца состояния двух положений), как будет описано в этой заявке ниже, определенное с помощью средства 37 для оценки периода двух положений. Когда прошедшее время достигает расчетного значения периода двух положений, средство 24 для определения движения ноги определяет, что состояние двух положений заканчивается и начинается состояние одного положения.
После обработки данных с помощью средства 24 для определения движения ноги и обработки данных с помощью средства 28 для вычисления положения ноги арифметический процессор 16 последовательно выполняет обработку данных с помощью средства 36 для оценки скорости движения и средства 37 для оценки периода двух положений.
Обработка данных с помощью средства 36 для оценки скорости движения осуществляется следующим образом. Как следует из фиг.11, когда человек 1 идет, то нога 2 на передней стороне человека 1 (нога 2 на правой стороне относительно направления перемещения человека 1, как показано на приведенном изображении), которая указана сплошными линиями, касается опоры, побуждая начало состояния двух положений во время t1. Допускается случай, когда во время t2 начинается следующее состояние двух положений, как показано с помощью человека 1, изображенного прерывистыми линиями (случай, когда нога 2 на задней стороне человека 1 оставляет опору во время t1, а затем касается опоры во время t2). В это время расстояние L перемещения человека 1 со времени t1 до времени t2 является расстоянием перемещения центра тазобедренного сустава 8 талии 3 в направлении оси x (направление перемещения человека) в абсолютной системе Cf координат (то есть в настоящем варианте осуществления равно величине перемещения в направлении оси x начала 0 координат системы Ср координат тела).
Расстояние L перемещения по существу соответствует полной сумме расстояния ΔL1 в направлении оси x от центра тазобедренного сустава 8 до лодыжки 12 ноги 2 на передней стороне человека 1 во время t1 и расстояния ΔL2 в направлении оси x от центра тазобедренного сустава 8 до лодыжки 12 ноги 2 на задней стороне человека 1 во время t2 (нога 2, которая была на передней стороне человека 1 во время t1).
В соответствии с этим, определяют вышеупомянутые расстояния ΔL1 и ΔL2 и время, прошедшее от времени t1 до времени t2 (t2-t1), то есть определяют время, прошедшее за один шаг от начала состояния двух положений до другого начала состояния двух положений. Это делает возможным получение скорости V движения человека 1 от времени t1 до t2 (средней скорости движения от t1 до t2) в соответствии с выражением (8), приведенным ниже, при использовании расстояний ΔL1 и ΔL2 и времени, прошедшего за один шаг (t2-t1).

При обработке данных с помощью средства 36 для оценки скорости движения в настоящем варианте осуществления, каждый раз, когда средство 24 для определения движения ноги обнаруживает начало состояния двух положений, определяется расстояние ΔL1, относящееся к ноге 2 на передней стороне человека 1, и расстояние ΔL2, относящееся к ноге 2 на задней стороне, как описано ниже, и расчетные значения расстояний ΔL1 и ΔL2 записываются и сохраняются. Затем, в соответствии с выражением (8) определяется скорость V движения человека 1 при использовании расстояния ΔL2, относящегося к ноге 2 на задней стороне, определенного в начале состояния двух положений, имеющего место в настоящее время, расстояния ΔL1, относящегося к ноге 2 на передней стороне, определенного в начале предшествующего состояния двух положений, и времени (=t2-t1), измеренного с помощью хронометрирующего средства 35 от начала предшествующего состояния двух положений до начала настоящего состояния двух положений.
В этом случае, вышеуказанные расстояния ΔL1 и ΔL2 определяют, как описано ниже. Что касается ноги 2 на передней стороне человека 1 в начале состояния двух положений, то углы отклонения бедра 9 и голени 11, определяемые с помощью средства 28 для вычисления положения ноги в начале состояния двух положений (время цикла, в котором с помощью средства 24 для определения движения ноги идентифицируется начало состояние двух положений), обозначаются как углы θс1 и θd1, соответственно (см.графическое изображение, соответствующее времени t1, иллюстрируемое на фиг.11). В это время расстояние ΔL1, относящееся к ноге 2, вычисляется в соответствии с выражением (9), приведенным ниже, при использовании данных этих углов θс1 и θd1 отклонения (θс1>0, θd1>0) и данных длин Dc и Dd бедра 9 и голени 11 соответственно.

Аналогичным образом, что касается ноги 2 на задней стороне человека 1 в начале состояния двух положений, если углы отклонения бедра 9 и голени 11, определяемые с помощью средства 28 для вычисления положения ноги в начале состояния двух положений, указываются как углы θс2 и θd2, соответственно (см. графическое изображение, соответствующее времени t2, иллюстрируемое на фиг.11), то в таком случае расстояние ΔL2, относящееся к ноге 2, вычисляется в соответствии с выражением (10), приведенным ниже, при использовании данных этих углов θс2 и θd2 отклонения (θс2>0, θd2>0) и данных длин Dc и Dd бедра 9 и голени 11 соответственно.

Благодаря обработке данных с помощью средства 36 для оценки скорости движения, как описано выше, скорость V движения человека 1 (точнее говоря, скорость движения на этапе непосредственно перед началом состояния двух положений) оценивается каждый раз, когда начинается состояние двух положений. В каждом времени цикла в течение периода от начала состояния двух положений до следующего начала состояния двух положений расчетное значение скорости V движения поддерживается при постоянной величине.
Обработка данных с помощью средства 37 для оценки периода двух положений осуществляется следующим образом. В соответствии со знаниями авторов этой заявки, период двух положений, который представляет собой продолжительность состояния двух положений при ходьбе человека 1, имеет тесную корреляцию со скоростью V движения человека 1. Точнее говоря, период двух положений при ходьбе человека 1 изменяется в зависимости от скорости V движения, как показано на фиг.12. Период двух положений укорачивается при увеличении скорости V движения.
В настоящем варианте осуществления, корреляция, иллюстрируемая на фиг.12, записывается заранее и сохраняется в арифметическом процессоре 16 в виде таблицы данных или полиномиальных функций, аппроксимирующих ее. При обработке данных с помощью средства 37 для оценки периода двух положений, в начале состояния двух положений расчетное значение периода двух положений, относящееся к состоянию двух положений, определяется на основе корреляции, иллюстрируемой на фиг.12, из самого последнего значения скорости V движения, определенного с помощью средства 36 для оценки скорости движения, как описано выше. Расчетное значение периода двойного положения сохраняется до тех пор, пока не начнется следующее состояние двух положений.
Арифметический процессор 16 выполняет обработку данных с помощью средства 31 для вычисления ускорения центра тяжести тела, средства 24 для определения движения ноги, хронометрирующего средства 35 и средства 37 для оценки периода двух положений и после этого выполняет обработку данных с помощью средства 38 для оценки силы реакции опоры для каждого времени цикла. При обработке данных с помощью средства 38 для оценки силы реакции опоры, данные ускорения T(ах, az) центра G0 тяжести, полученные с помощью средства 31 для вычисления ускорения центра тяжести тела, и данные массы М человека 1 используются для последовательного определения расчетного значения равнодействующей силы F=T(Fx, Fz) реакции опоры, соответствующей вышеуказанному выражению (2) для каждого времени цикла. В этом случае, если состояние движения ноги 2, идентифицируемое с помощью средства 24 для определения движения ноги, является состоянием одного положения, то расчетное значение вышеуказанной равнодействующей силы F=T(Fx, Fz) реакции опоры будет непосредственно определяться как расчетное значение силы реакции опоры, действующей на одну ногу 2, находящуюся в контактном взаимодействии с грунтом.
Между тем, если состояние движения ноги 2, определяемое с помощью средства 24 для определения движения ноги, является состоянием двух положений, то средство 38 для оценки силы реакции опоры определяет силы Fr=T(Frx, Frz) и Ff=T(Ffx, Ffz) реакции опоры, действующие на соответствующие ноги 2, как описано ниже. В соответствии со знаниями авторов этой заявки, если внимание сфокусировано на зависимости между отношением каждой составляющей силы Fr реакции опоры, действующей на ногу 2 на задней стороне человека 1 в состоянии двух положений, к каждой составляющей равнодействующей силы F реакции опоры в начале состояния двух положений (называемом ниже "отношением сил реакции опоры") и отношением времени, прошедшего от начала состояния двух положений, к периоду двух положений (= прошедшее время/период двух положений, называемом ниже "коэффициентом времени двух положений"), то между ними существует характерная корреляция и на эту корреляцию большое влияние оказывает скорость V движения или аналогичный параметр человека 1.
Точнее говоря, отношение сил Frz/Fzs реакции опоры, которое означает отношение составляющей Frz в направлении оси 2 (в вертикальном направлении) силы Frz реакции опоры, действующей на ногу 2 на задней стороне, к составляющей Fz в направлении оси z равнодействующей силы F реакции опоры в начале состояния двух положений (указываемой ниже ссылочным символом "Fzs"), имеет по существу постоянную корреляцию, иллюстрируемую на фиг.13(а), в зависимости от коэффициента времени двух положений независимо от скорости V движения или аналогичного параметра человека 1. В основном, отношение Frz/Fzs сил реакции опоры уменьшается от единицы до нуля с течением времени состояния двух положений. Кроме того, отношение Frx/Fxs сил реакции опоры, которое означает отношение составляющей Frx в направлении оси x (в горизонтальном направлении перемещения человека 1) силы Fr реакции опоры, действующей на ногу 2 на задней стороне, к составляющей Fx в направлении оси x равнодействующей силы F реакции опоры в начале состояния двух положений (указываемой ниже ссылочным символом "Fxs"), имеет по существу постоянную корреляцию, иллюстрируемую на фиг.13(b), относительно коэффициента времени двух положений независимо от скорости V движения или аналогичного параметра человека 1. С течением времени состаяния двух положений и отношение Frx/Fxs сил реакции опоры сначала увеличивается от единицы, а затем уменьшается до нуля.
В соответствии с настоящим вариантом осуществления, корреляции (характеристические данные), иллюстрируемые на фиг.13(а) и 13(b), записываются заранее и сохраняются в арифметическом процессоре 16 в виде таблиц данных или полиномиальных функций, аппроксимирующих корреляции. Обработка данных с помощью средства 38 для оценки силы реакции опоры в состоянии двух положений определяет расчетное значение равнодействующей силы F реакции опоры и также последовательно определяет для каждого времени цикла коэффициент времени двух положений из текущего значения данных измерения прошедшего времени, полученных с помощью хронометрирующего средства 35, и самого последнего значения данных расчетного значения периода двух положений, которое было получено с помощью средства 37 для оценки периода двух положений. Затем, из данных определенного коэффициента двух положений последовательно определяется отношение Frz/Fzs сил реакции опоры в направлении оси z на основе корреляции, иллюстрируемой на фиг.13(а), и затем отношение Frz/Fzs сил реакции опоры умножается на составляющую Fzs в направлении оси z равнодействующей силы F реакции опоры в начале состояния двух положений для последовательного определения составляющей Frs в направлении оси z силы Fr реакции опоры, действующей на ногу 2 на задней стороне. Аналогичным образом, из полученных данных коэффициента времени двух положений и на основе корреляции, иллюстрируемой на фиг.13(b), последовательно определяют отношение Frx/Fxs сил реакции опоры и затем отношение Frx/Fxs сил реакции опоры умножают на составляющую Fxs в направлении оси x равнодействующей силы F реакции опоры в начале состояния двух положений для последовательного определения составляющей Frx в направлении оси x силы Fr реакции опоры, действующей на ногу 2 на задней стороне.
Кроме того, в соответствии с вышеуказанным выражением (3) сила Fr=T(Frx, Frz) реакции опоры, относящаяся к ноге 2 на задней стороне, вычитается из равнодействующей силы F=T(Fx, Fz) реакции опоры, определяемой в каждом времени цикла (векторное вычитание) для последовательного получения силы Ff=T(Ffx, Ffz)=T(Fx-Frx, Fz-Frz) реакции опоры, относящейся к ноге 2 на передней стороне. Таким образом, будут последовательно определены силы Fr и Ff реакции опоры соответствующих двух ног 2 и 2 в состоянии двух положений.
Затем арифметический процессор 16 выполняет обработку данных средства 39 для оценки момента сустава для определения моментов, действующих на коленный сустав 10 и тазобедренный сустав 8 каждой ноги 2. Эта обработка данных осуществляется на основе так называемой обратной динамической модели при использовании текущих значений данных, получаемых с помощью средства 38 для оценки силы реакции опоры, средства 32, которое вычисляет ускорение каждой части ноги, средства 33, которое вычисляет угловое ускорение каждой части ноги, средства 34 для оценки точки приложения силы реакции опоры и средства 28 для вычисления положения ноги, соответственно. Обратную динамическую модель используют для определения моментов, действующих на суставы по прядку, начиная с сустава, ближайшего к точке приложения силы реакции опоры, при использовании уравнения движения, относящегося к поступательным движениям частей, соответствующих жестким телам человека 1, и уравнения движения, относящегося к их вращательным движениям. В настоящем варианте осуществления моменты, действующие на коленный сустав 10 и тазобедренный сустав 8 каждой ноги 2, определяют по порядку.
Точнее говоря, как следует из фиг.14, что касается голени 11 каждой ноги 2, то сила (сила реакции сустава), действующая на лодыжку 12 на периферическом конце голени 11, сила (сила реакции сустава), действующая на коленный сустав 10 голени 11, и поступательное ускорение центра G2 тяжести голени 11 представлены как T(F1x, F1z), T(F2x, F2z) и T(а2х, a2z) соответственно, в соответствии с условными обозначениями составляющих в абсолютной системе Cf координат, а масса голени 11 указана как m2. В этом случае уравнение движения, относящегося к поступательному движению центра G2 тяжести голени 11, будет представлено выражением (11), приведенным ниже:
T(m2·а2х, m2·a2z)=T(F1x-F2x, F1z-F2z-m2·g), таким образом,

Ускорение T(a2x, a2z) центра G2 тяжести голени определяют с помощью средства 32, которое вычисляет ускорение каждой части ноги. Сила T(F1x, F1z) реакции сустава, действующая на лодыжку 12 на периферическом конце голени 11, приблизительно равна расчетному значению силы реакции опоры, определенной с помощью средства 38 для оценки силы реакции опоры, действующей на ногу 2, имеющую голень 11. Точнее говоря, в состоянии одного положения, если нога 2 находится в контактном взаимодействии с грунтом, то сила T(F1x, F1z) реакции сустава является силой T(Fx, Fz) реакции опоры, полученной с помощью вышеупомянутого выражения (2). Если нога 2 является свободной ногой, то T(F1x, F1z)=T(0,0). В состояния двух положений, если нога 2 является ногой на задней стороне относительно направления перемещения человека 1, то сила T(F1x, F1z) реакции сустава является силой T(Frx, Frz) реакции опоры, определенной, как описано выше, при использовании корреляций, иллюстрируемых на фиг.13(а) и 13(b). Если нога 2 является ногой на передней стороне, то сила T(F1x, F1z) реакции сустава является силой T(Ffx, Ffz) реакции опоры, определенной, как описано выше, в соответствии с вышеуказанным выражением (3).
Следовательно, сила T(F2x, F2z) реакции сустава, действующая на коленном суставе 10 каждой ноги 2, определяется в соответствии с вышеуказанным выражением (11) из данных ускорения T(а2х, a2z) центра G2 тяжести голени 11, определенного с помощью средства 32, которое вычисляет ускорение каждой части ноги, данных силы T(F1x, F1z) реакции опоры, определенной с помощью средства 38 для оценки силы реакции опоры, данных массы m2 голени 11, определенной заранее, и значения ускорения g силы тяжести (свободного падения).
Как следует из фиг.14, момент, действующий на лодыжку 12 на периферическом конце голени 11, указан ссылочным символом M1, момент, действующий на коленном суставе 10 голени 11, указан ссылочным символом М2, момент инерции, действующий вокруг центра G2 тяжести голени 11, указан ссылочным символом IG2, а угловое ускорение вокруг центра G2 тяжести указано ссылочным символом α2. Кроме того, если расстояние между центром G2 тяжести голени 11 и центром коленного сустава 10 указано ссылочным символом d2, а расстояние между центром G2 тяжести голени 11 и лодыжкой 12 указано ссылочным символом d2' (=Dd-d2) в ассоциации с фиг.4, то уравнение движения, относящегося к вращательному движению вокруг центра G2 тяжести голени 11, представляется следующим выражением (12):
IG2·α2=M1-M2+F1x·d2·cosθd-F1z·d2·sinθd+F2x·d2·cosθd-F2z·d2·sinθd,
следовательно,

Ссылочным символом M1 в выражении (12) указан момент, получаемый как векторное произведение вектора точки приложения силы реакции опоры, определенного с помощью средства 34 для оценки точки приложения силы реакции опоры на ноге 2, имеющей голень 11, используемого в выражении (12), и вектора силы реакции опоры, определенного с помощью средства 38 для оценки силы реакции опоры, действующей на ногу 2. Ссылочным символом α2 указано угловое ускорение голени 11, определяемое с помощью средства 33, которое вычисляет угловое ускорение каждой части ноги. Ссылочным символом θd указан угол отклонения голени 11, определяемый с помощью средства 28 для вычисления положения ноги. Ссылочными символами T(F1x, F1z) указано расчетное значение силы реакции опоры, определяемой с помощью средства 38 для оценки силы реакции опоры, как было описано выше. Силу T(F2x, F2z) определяют с помощью вышеуказанного выражения (11). Момент инерции lG2 определяют и хранят в арифметическом процессоре 16 вместе с данными, включающими в себя массу m2 и размеры голени 11, определенные заранее.
Следовательно, момент М2, действующий на коленный сустав 10, определяют в соответствии с вышеуказанным выражением (12) при использовании данных расчетного значения силы реакции опоры, полученных с помощью средства 38 для оценки силы реакции опоры, данных вектора точки приложения силы реакции опоры, полученных с помощью средства 34 для оценки точки приложения силы реакции опоры, данных углового ускорения α2 голени 11, полученных с помощью средства 33, которое вычисляет угловое ускорение каждой части ноги, данных угла θd отклонения голени 11, полученных с помощью средства 28 для вычисления положения ноги, данных силы T(F2x, F2z) реакции сустава, определенных с помощью вышеуказанного выражения (11), данных момента IG2 инерции, размера Dd и положения d2 центра G2 тяжести голени 11, которые определяют заранее.
Средство 39 для оценки момента сустава определяет момент М2, действующий на коленный сустав 10 голени, как описано выше, затем выполняет такую обработку данных как вычисление для определения момента, действующего на тазобедренный сустав 8 бедра 9. Основная концепция обработки данных идентична способу определения момента М2 коленного сустава 10, так что будут опущены детальные иллюстрации и объяснение; однако краткое содержание будет приведено ниже.
Во-первых, сначала определяют силу T(F3x, F3z) реакции сустава, действующую на тазобедренный сустав 8 бедра 9, в соответствии со следующим выражением (13) (выражение аналогичного вида, что и выражение (11)) на основе уравнения движения, относящегося к поступательному движению центра G1 тяжести (см. фиг.4) бедра 9:

Символами T(F2x, F2z) указана сила реакции коленного сустава 10, предварительно определенная с помощью вышеуказанного выражения (11). Символами T(a1x, a1z) указано ускорение (поступательное ускорение) в абсолютной системе Cf координат центра G1 тяжести бедра 9, определяемое с помощью средства 32, которое вычисляет ускорение каждой части ноги. Ссылочным символом m1 указана масса бедра 9, определяемая заранее, а ссылочным символом g указано ускорение силы тяжести.
В таком случае, момент М3, действующий на тазобедренный сустав 8 бедра 9, определяют в соответствии со следующим выражением (14) (выражением, имеющим аналогичный вид, что и вышеуказанное выражение (12)) на основе уравнения движения, относящегося к вращательному движению вокруг центра G1 тяжести бедра 9.

Ссылочным символом М2 указан момент коленного сустава 10, определенный в соответствии с вышеуказанным выражением (12), символами T(F2x, F2z) указана сила реакции коленного сустава 10, определенная с помощью вышеуказанного выражения (11), T(F3x, F3z) означает силу реакции тазобедренного сустава 8, определяемую вышеприведенным выражением (13), ссылочным символом IG1 указан момент инерции вокруг центра G1 тяжести бедра 9, определяемый заранее, ссылочным символом α1 указано угловое ускорение бедра 9, определяемое с помощью средства 33, которое вычисляет угловое ускорение каждой части ноги, а ссылочным символом θс указан угол отклонения бедра 9, определяемый с помощью средства 28 для вычисления положения ноги. Кроме того, ссылочным символом d1 указано расстояние от центра тазобедренного сустава 8 до центра G1 тяжести бедра 9 (смотри фиг.4), а ссылочным символом d1' указано расстояние от центра коленного сустава 10 до центра G1 тяжести бедра 9 (Dc-d1 на фиг.4), причем эти расстояния являются зависимыми от положения центра G1 тяжести и размера (длины) бедра 9, определяемых заранее.
Обработку данных, описанную выше, последовательно выполняют для каждого времени цикла арифметического процессора 16 для последовательной оценки в реальном масштабе времени сил реакции опоры, действующих на соответствующие ноги 2, и моментов, действующих на коленные суставы 10 и тазобедренные суставы 8 соответствующих ног 2.
Хотя в настоящем описании будет опущено подробное объяснение, расчетные значения моментов коленного сустава 10 и тазобедренного сустава 8, которые были получены, используют, например, для управления аппаратом, приспособленным для содействия человеку 1 при ходьбе (управление аппаратом, который содержит электродвигатель или аналогичное устройство, способным прикладывать вспомогательный крутящий момент к коленным суставам 10 и тазобедренным суставам 8).
Зависящее от времени изменение расчетного значения силы реакции опоры (точнее говоря, абсолютной величины расчетного значения силы реакции опоры), определяемого посредством обработки данных, выполняемой с помощью арифметического процессора 16, описанного выше, иллюстрируется сплошными линиями на фиг.15. Кроме того, зависящие от времени изменения расчетных значений моментов, действующих на коленные суставы 10 и тазобедренные суставы 8, определяемых путем обработки данных, выполняемой с помощью арифметического процессора 16, иллюстрируются сплошными линиями на фиг.16. На фиг.15 и 16 иллюстрируются случаи, в которых человек 1 идет по горизонтальной местности по существу с постоянной скоростью. В этом случае, на фиг.15 приведен сравнительный пример (эквивалент истинному значению силы реакции опоры), в котором силы реакции опоры, фактически измеренные при использовании измерителя силы или аналогичного прибора, также показаны прерывистыми линиями. На фиг.16 приведен сравнительный пример (эквивалент истинных значений моментов на коленном суставе 10 и тазобедренном суставе 8), где силы моментов на коленном суставе 10 и тазобедренном суставе 8, фактически измеренные при использовании измерителя крутящего момента или аналогичного прибора, также показаны прерывистыми линиями.
Как очевидно из фиг.15, настоящий вариант осуществления позволяет получать высокоточные расчетные значения сил реакции опоры. Кроме того, настоящий вариант осуществления позволяет с относительно высокой точностью оценивать моменты, действующие на коленный сустав 10 и тазобедренный сустав 8, как показано на фиг.16, благодаря использованию расчетных значений сил реакции опоры.
Таким образом, в соответствии с настоящим вариантом осуществления можно просто оценивать в реальном масштабе времени силы реакции опоры, действующие на соответствующие ноги 2, и моменты, действующие на тазобедренные суставы 8 и коленные суставы 10 соответствующих ног 2, благодаря использованию относительно небольших и легких датчиков, например датчиков 22 и 23 углов, прикрепленных к тазобедренному суставу 8 и коленному суставу 10 ((прим.пер.) исправлено в соответствии с прилагаемой инструкцией для осуществления изменений), гиродатчиков 14 и 19 и измерителей 15, 20 и 21 ускорения, прикрепленных к туловищу 5. Это исключает необходимость обеспечения ног 2 датчиками, которые мешают ходьбе человека 1 или добавляют нагрузку на движения ног 2. Кроме того, оценка может быть достигнута с относительно высокой точностью независимо от скорости V движения или аналогичного параметра.
В варианте осуществления, описанном выше, в течение обработки данных, выполняемой с помощью средства 24 для определения движения ноги, если время, прошедшее от начала состояния двух положений, достигает расчетного значения периода двух положений, то определялся конец состояния двух положений и начало состояния одного положения. Однако в качестве альтернативного примера, конец состояния двух положений и начало состояния одного положения может быть определено следующим образом. Абсолютное значение силы Fr=√(Frx2+Frz2) реакции опоры, определенное для каждого времени цикла с помощью средства 38 для оценки силы реакции опоры на ногу 2 на задней стороне человека 1 (нога 2, которая оставляет опору в конце состояния двух положений) в состоянии двух положений, последовательно сравнивается с заданным пороговым значением (положительным значением, почти равным нулю), которое установлено заранее. Когда абсолютное значение силы Fr реакции опоры уменьшается до порогового значения или ниже (когда абсолютное значение достигает почти нуля), определяется, что состояние двух положений закончилось и началось состояние одного положения. Это также позволяет достигать точного определения.
В настоящем варианте осуществления объяснение было дано, взяв случай, в котором в качестве примера настоящее изобретение применено к человеку 1. Однако настоящее изобретение может быть также применено к двуногому шагающему роботу в качестве двуногого шагающего тела. Некоторые конструкции двуногих шагающих роботов имеют талии и грудные клетки, выполненные как одно целое. В таком случае для оценки сил реакции опоры и моментов на суставах ног представляется возможным крепление гиродатчика и измерителя ускорения в продольном направлении только на талию или на грудную клетку таким же образом, как в настоящем варианте осуществления. Кроме того, в двуногом шагающем роботе углы сгибания тазобедренных суставов и коленных суставов могут быть альтернативно определены на основе управляющих параметров контроллера для исполнительных механизмов этих суставов.
Кроме того, в настоящем варианте осуществления использовали данные детектирования измерителя 21 ускорения талии в вертикальном направлении, когда необходимо определить состояние движения ноги 2. Однако вместо данных детектирования может быть использовано значение, например, составляющей в вертикальном направлении (в направлении оси z) ускорения а0 талии 3 в абсолютной системе Cf координат, которое определяется с помощью средства 27 для измерения опорного ускорения.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Как описано выше, настоящее изобретение пригодно для определения сил реакции опоры и моментов соединений, действующих на ноги подвижного тела, при содействии двуногому шагающему телу, например человеку или роботу, в ходьбе или проведению регулирования его ходьбы.
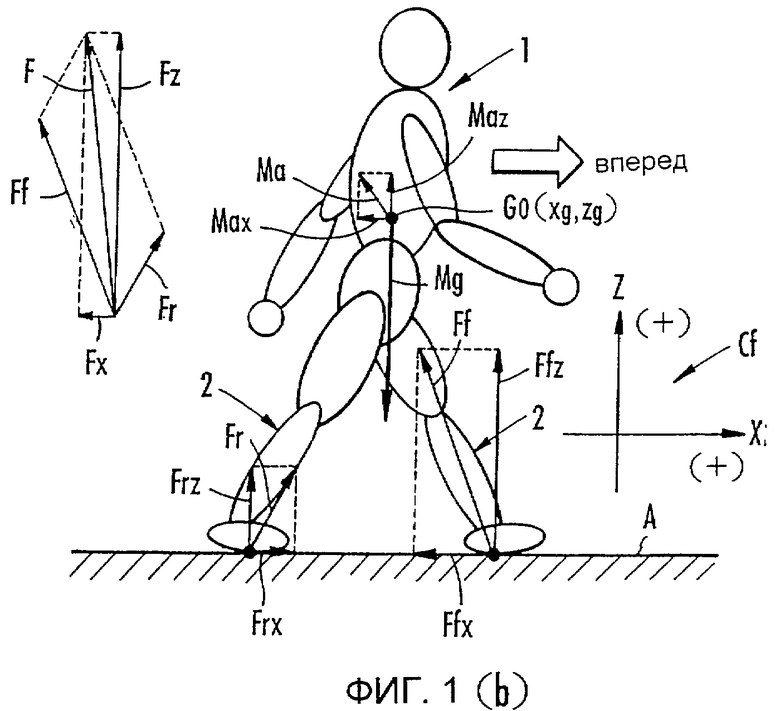
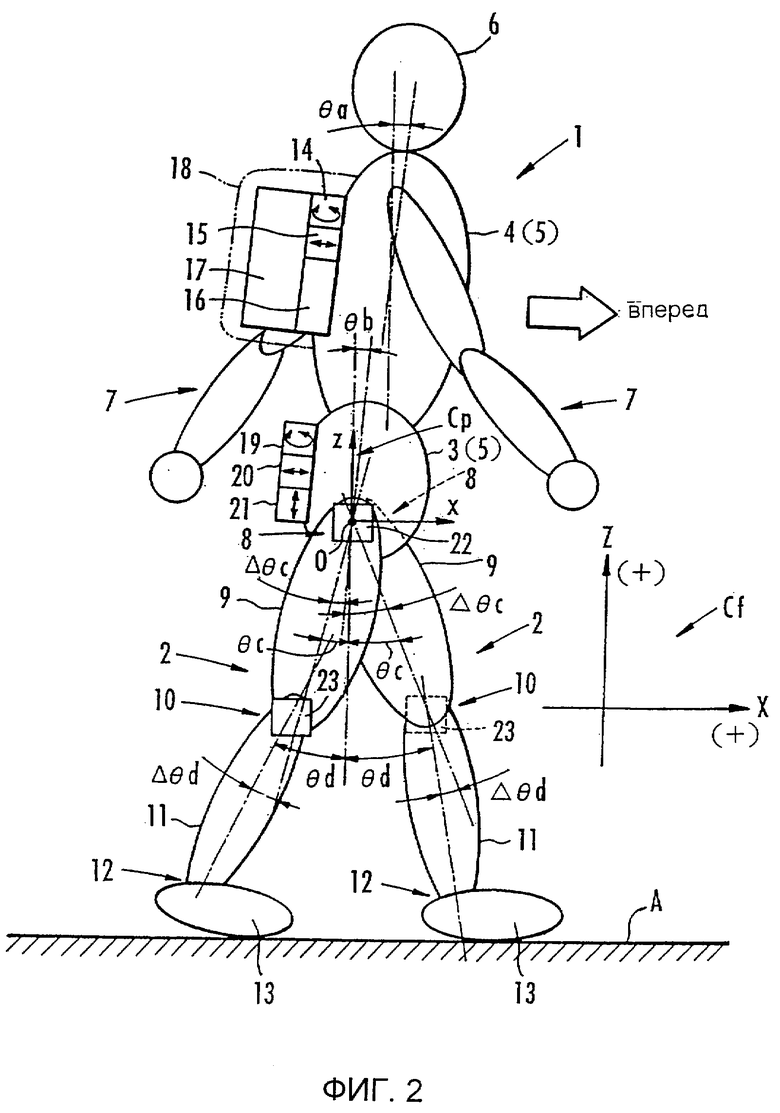
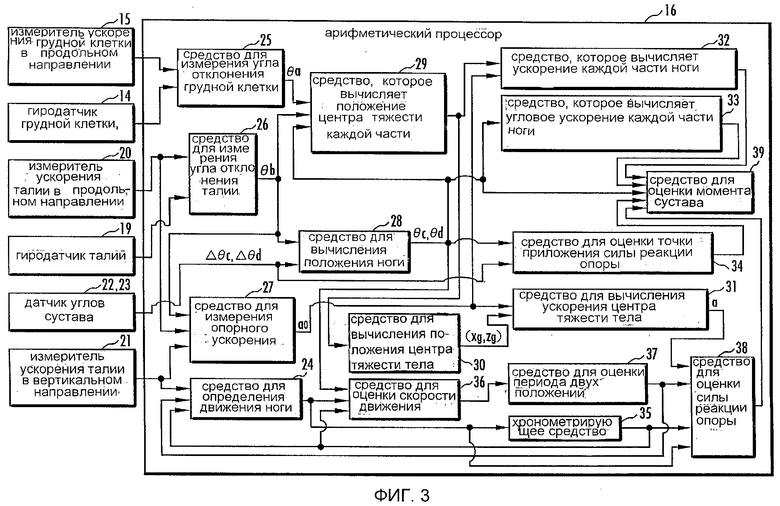
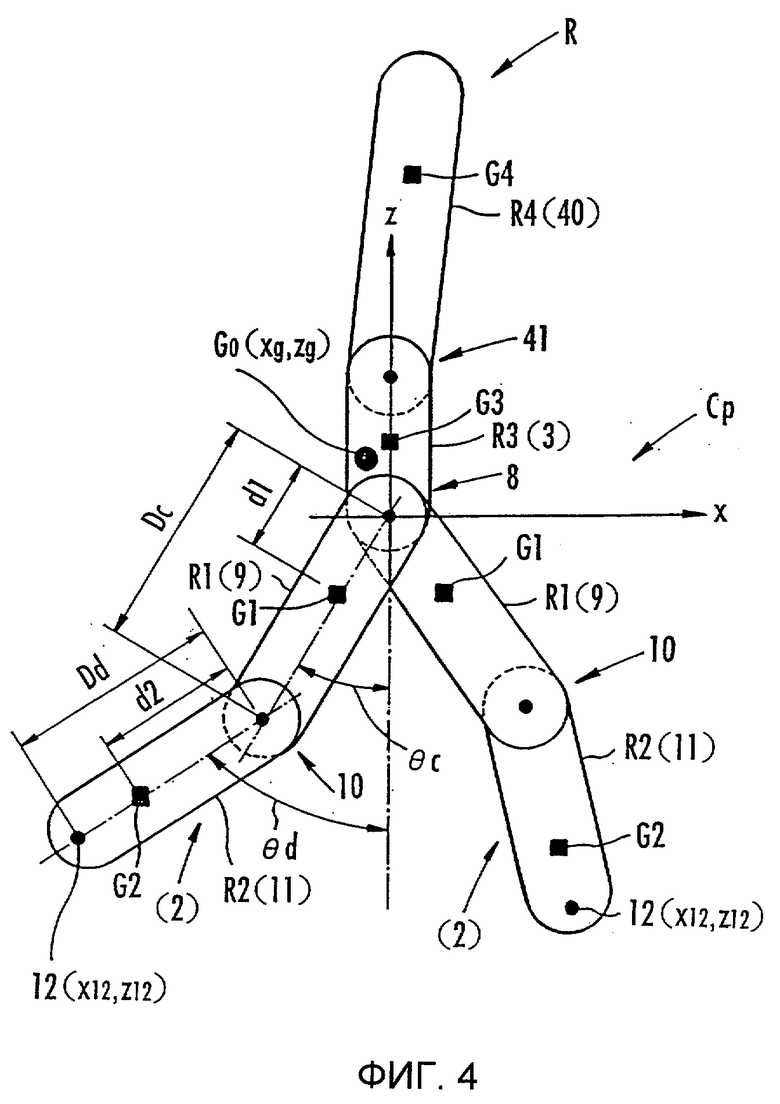
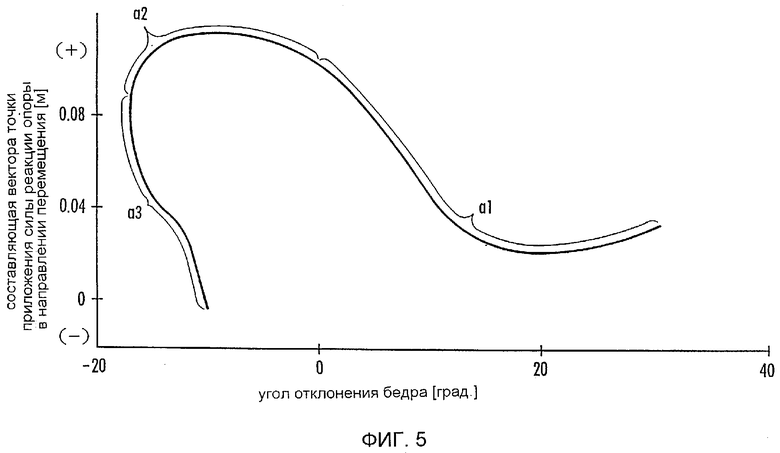
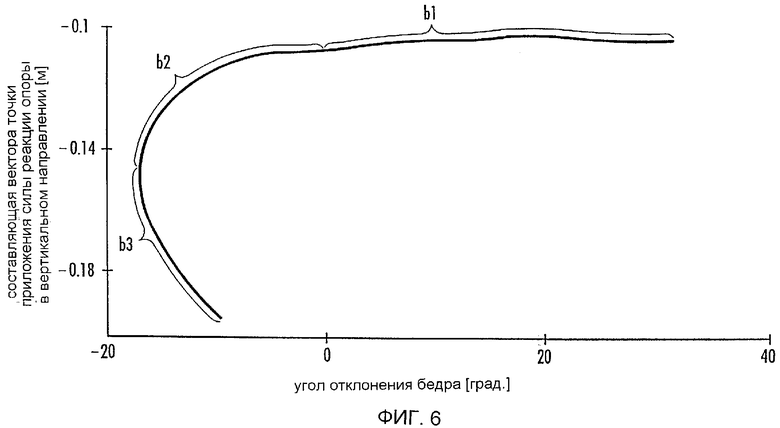
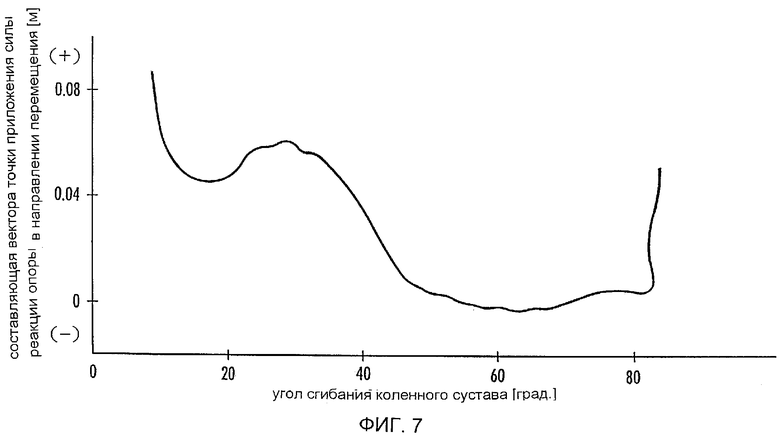
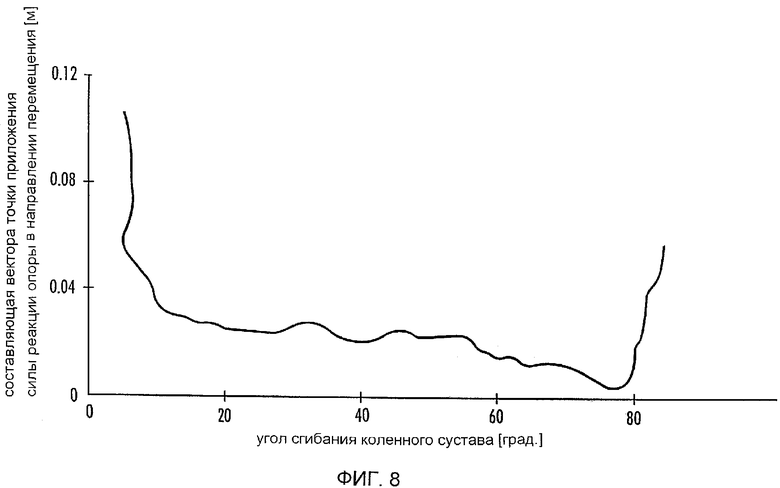
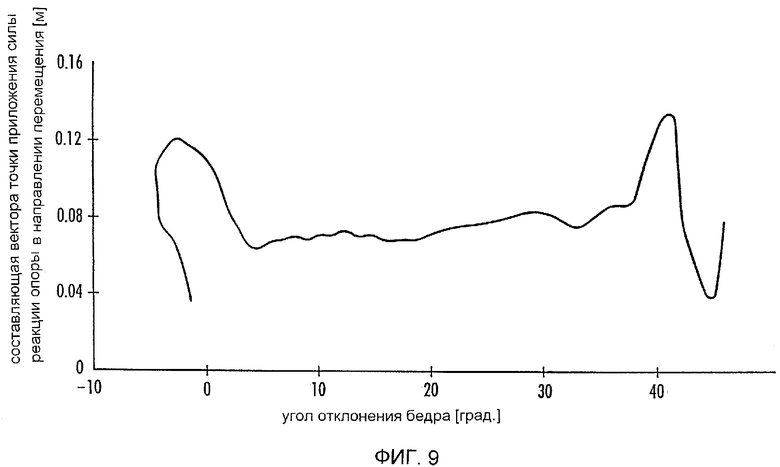
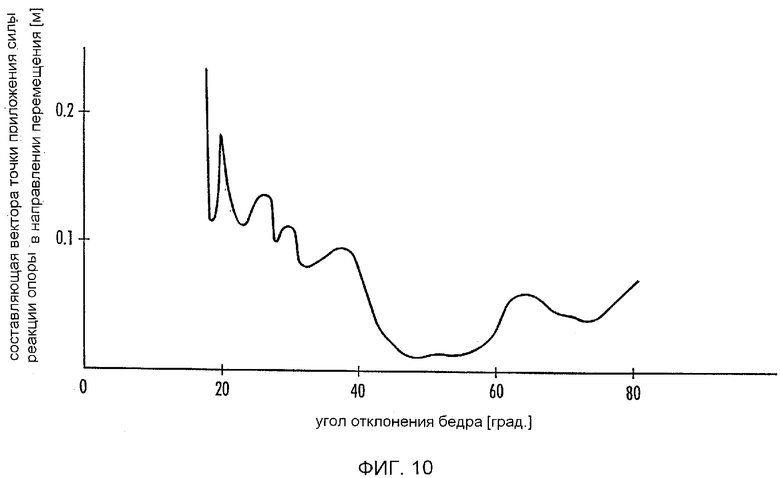
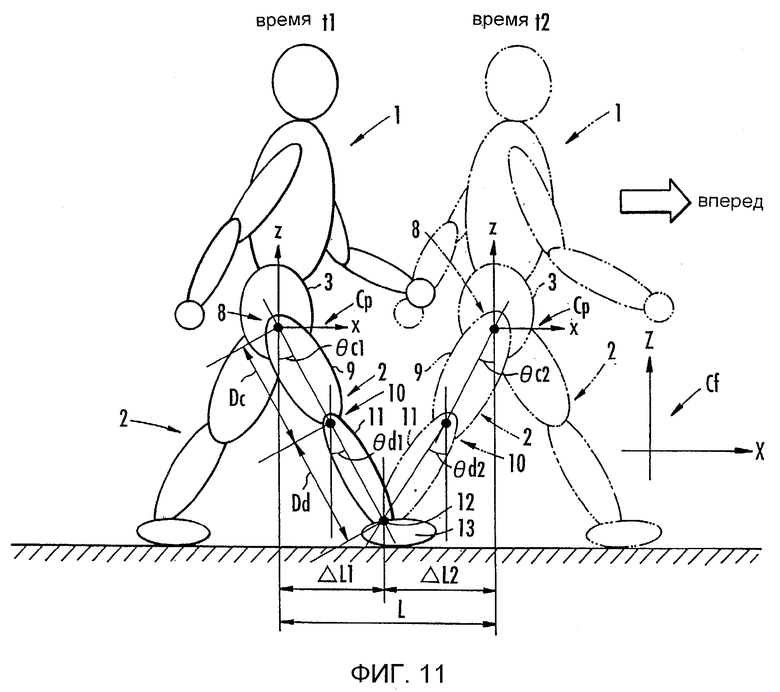
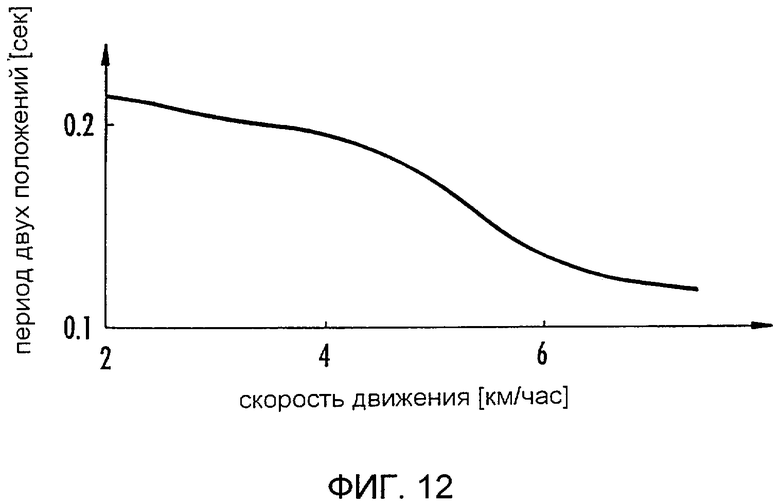
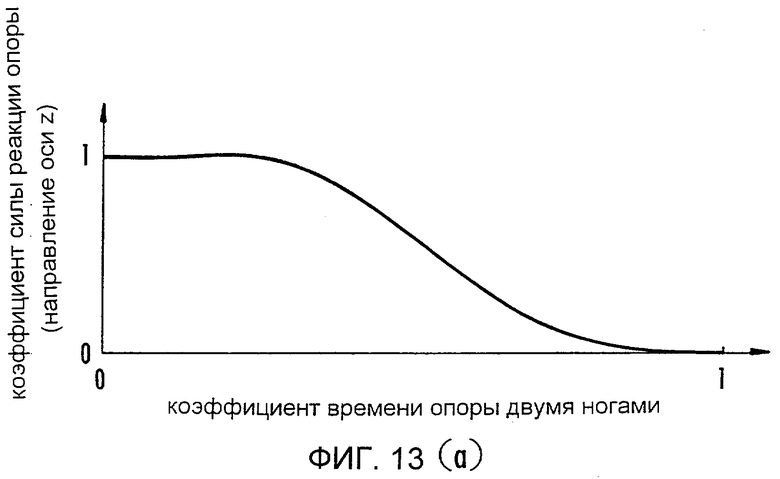
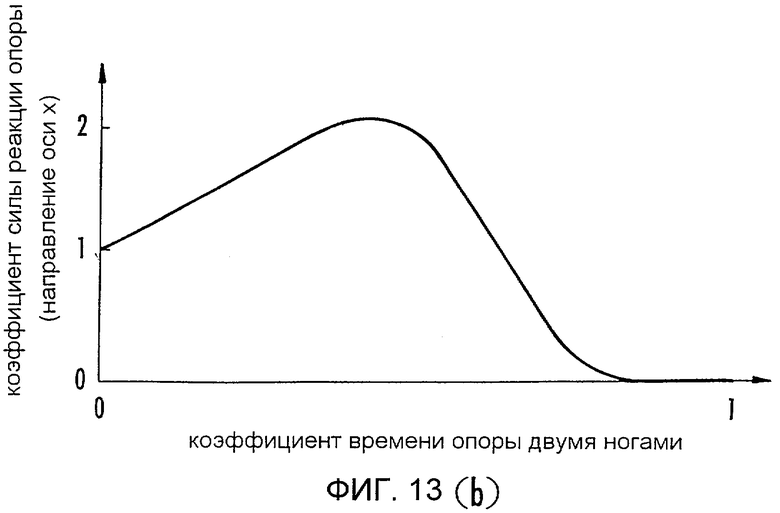
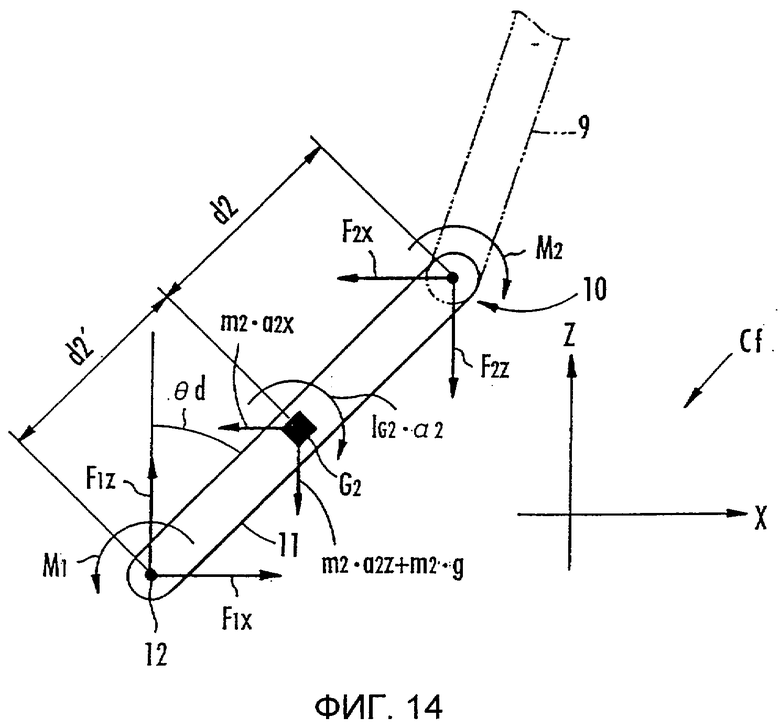
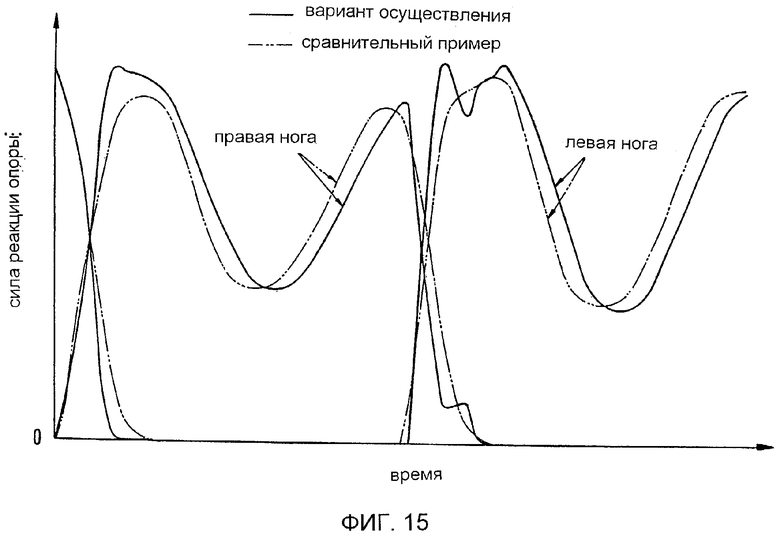
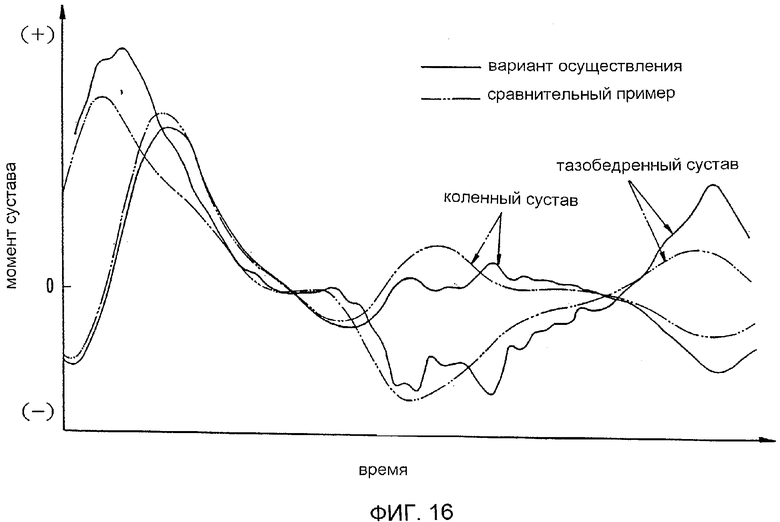
Изобретение относится к способу оценки сил реакции опоры, действующих на ноги двуногого шагающего тела, например человека или двуногого шагающего робота или аналогичного устройства, а также к способу оценки моментов, действующих на суставы ноги двуногого шагающего тела, благодаря использованию расчетных значений сил реакции опоры. Последовательно определяют, является ли состояние движения ног состоянием одного положения или состоянием двух положений, а равнодействующую силу F реакции опоры оценивают на основе уравнения движения для центра G0 тяжести двуногого шагающего тела. Если состояние движения является состоянием одного положения, то расчетное значение равнодействующей силы F реакции опоры непосредственно используют как расчетное значение силы реакции опоры ноги. Если состояние движения является состоянием двух положений, то определяют силу Fr реакции опоры ноги на задней стороне при использовании данных измерения прошедшего времени состояния двух положений и скорости движения двуногого шагающего тела и предварительно определенных характеристических данных и силу Fr реакции опоры вычитают из равнодействующей силы F реакции опоры для определения силы Ff реакции опоры ноги передней стороны. Изобретение позволяет с высокой точностью в реальном масштабе времени с помощью относительно простой методики определять силы реакции опоры, действующие на ноги, и моменты, действующие на суставы ног. 3 н. и 8 з.п. ф-лы, 16 ил.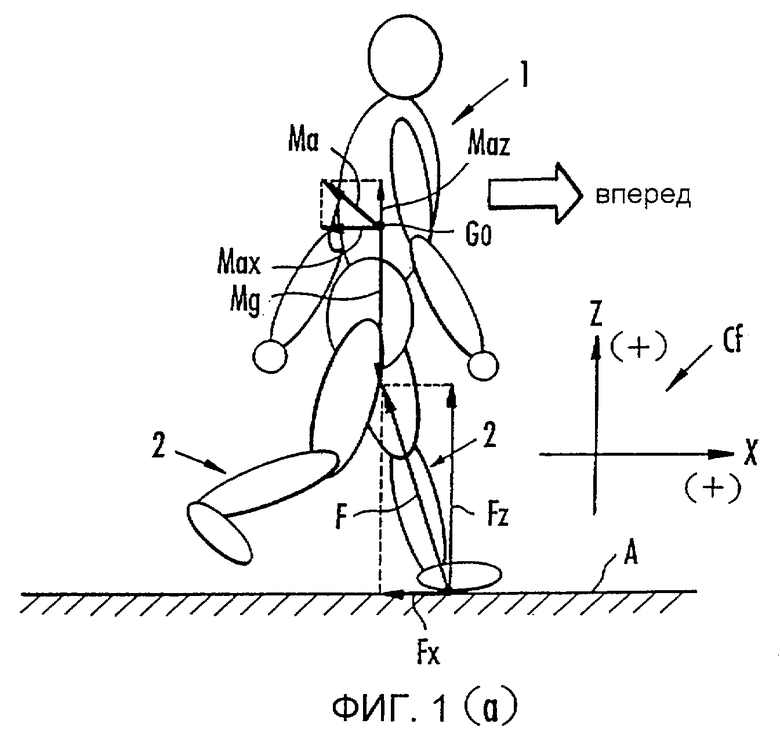
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| US 5404086 А, 04.04.1995 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

