Изобретение относится к системам автоматического регулирования, а конкретно к электрогидравлическим системам, предназначенным для обеспечения функционирования спускоподъемных устройств, обеспечивающих глубоководные работы, например работу водолазного колокола, опускаемого с корабля.
Известны электрогидравлические системы [1], обеспечивающие глубоководные грузоподъемные работы, имеющие в своем составе компенсатор вертикальной качки носителя. Однако для подобных устройств не предъявляются высокие требования к точности компенсации вертикальной качки ввиду отсутствия обитаемости подводной части устройства.
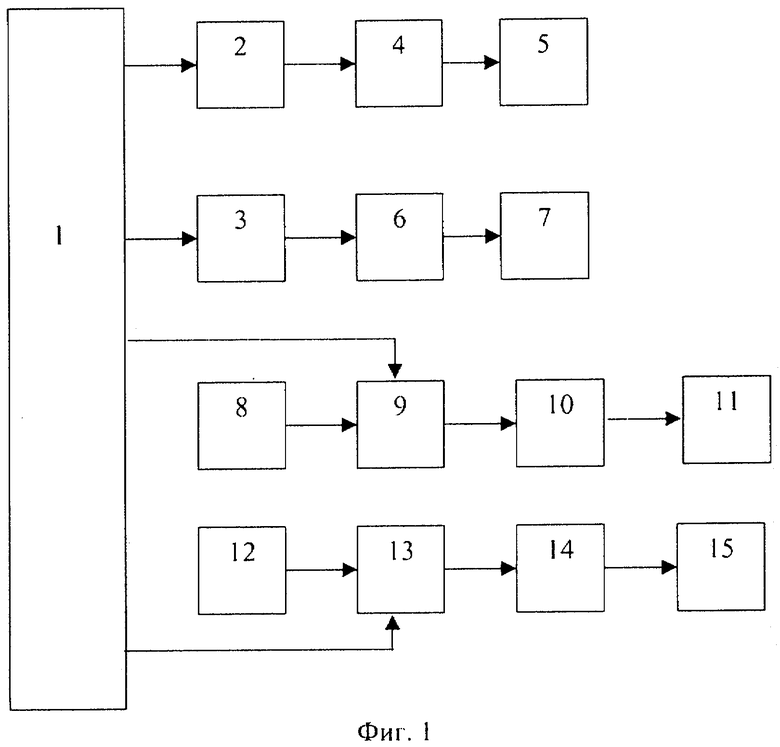
Известна также электрогидравлическая система [2], примененная в спускоподъемном устройстве водолазного колокола, принятая за прототип, которая (см. фиг.1) в своей основе содержит систему управления 1, связанную с управляющими входами регулируемых гидравлических насосов 2 и 3. Гидравлический насос 2 соединен с гидромотором 4, управляющим лебедкой 5 грузового якоря. Гидравлический насос 3 соединен с гидромотором 6, управляющим лебедкой 7 водолазного колокола. Кроме того, электрогидравлическая система содержит последовательно соединенные первый гидронасос постоянной производительности 8, первый регулятор давления 9, силовой гидроцилиндр 10 и компенсатор изменения силы натяжения троса 11 грузового якоря при вертикальной качке корабля, причем управляющий вход первого регулятора давления 9 соединен с системой управления 1. Также, в систему входит последовательно соединенные второй гидронасос постоянной производительности 12, второй регулятор давления 13, силовой гидроцилиндр 14 и компенсатор вертикальной качки 15 водолазного колокола, причем вход второго регулятора давления 13 соединен с системой управления 1.
Кроме того, данная электрогидравлическая система содержит вспомогательные гидравлические устройства, не являющиеся предметом настоящего изобретения.
Данная электрогидравлическая система работает следующим образом. По командам от оператора системы управления 1 включается в работу любой из регулируемых насосов 2 или 3, задающих с помощью гидромоторов 4 или 6 вращение лебедок 5 или 7 с заданной оператором системы управления 1 скоростью и направлением вращения, обеспечивающими выполнение задач спуска-подъема грузового якоря или водолазного колокола. Для уменьшения влияния вертикальной качки корабля на силу натяжения троса, установленного на грунте грузового якоря, применяется компенсатор изменения силы натяжения троса 11. При этом от системы управления 1 задается в первый регулятор давления 9 сигнал, пропорциональный давлению в силовом гидроцилиндре 10, соответствующему требуемому натяжению троса. Первый регулятор давления 9 управляет включением в работу первого гидронасоса постоянной производительности 8, который поддерживает заданное давление в рабочей полости силового гидроцилиндра 10. Силовой гидроцилиндр 10 обеспечивает перемещение компенсатора вертикальной качки 11 грузового якоря в противофазе с вертикальным колебанием корабля с той же амплитудой, тем самым обеспечивая постоянство натяжения троса грузового якоря.
Аналогичным образом работает компенсатор вертикальной качки водолазного колокола. При этом от системы управления 1 задается во второй регулятор давления 13 сигнал, пропорциональный давлению в силовом гидроцилиндре 14, соответствующему весовой нагрузке на компенсаторе вертикальной качки 15 водолазного колокола для заданной глубины погружения. Второй регулятор давления 13 управляет включением в работу второго гидронасоса постоянной производительности 12, который поддерживает заданное давление в силовом гидроцилиндре 14, обеспечивающем перемещение компенсатора вертикальной качки 15 водолазного колокола в противофазе с вертикальными колебаниями корабля с той же амплитудой, тем самым обеспечивая постоянство положения водолазного колокола относительно грунта.
Недостатком описанной электрогидравлической системы является низкая точность поддержания заданной скорости вращения лебедок, вызванная отсутствием автоматического учета изменения нагрузки на лебедку от изменения веса тросов при спуске-подъеме полезной нагрузки. Корректировка скорости в данной системе проводится вручную оператором системы управления. Также недостатком системы является малая точность компенсации влияния вертикальной качки корабля на положение водолазного колокола в пространстве, вследствие незначительных изменений нагрузки на компенсаторе 15 от воздействия парусности водолазного колокола и изменения его инерционных параметров при вертикальной качке корабля. Кроме того, недостатком системы является ее малая надежность, т.к. при выходе из строя любого гидронасоса прекращается возможность выполнения системой задач по назначению.
Предлагаемое техническое решение направлено на исключение описанных недостатков, то есть на повышение точности поддержания заданной скорости вращения лебедок и точности компенсации влияния вертикальной качки корабля на положение водолазного колокола в пространстве, а также на повышение надежности системы в целом.
Сущность предлагаемого технического решения заключается в том, что в электрогидравлическую систему управления спускоподъемным устройством водолазного колокола, состоящую из не менее чем двух регулируемых насосов, системы управления, выходы которой соединены с управляющими входами каждого регулируемого насоса, первого гидромотора, выход которого соединен с лебедкой грузового якоря, второго гидромотора, выход которого соединен с лебедкой водолазного колокола, а также из первого силового гидроцилиндра, выход которого соединен с компенсатором изменения силы натяжения троса грузового якоря, из второго силового гидроцилиндра, выход которого соединен с компенсатором качки водолазного колокола, введены: гидравлическое коммутационное устройство, входы которого соединены с выходами каждого регулируемого насоса, выходы соединены с каждым гидромотором и гидроцилиндром, а управляющие входы - с системой управления; регулируемый насос, вход которого соединен с системой управления, а выход - с гидравлическим коммутационным устройством; датчики давления, входы которых подключены к выходам регулируемых насосов; датчики положения штока силовых гидроцилиндров, входы которых связаны со штоками силовых гидроцилиндров; датчики скорости вращения гидромоторов, входы которых связаны с выходами гидромоторов, причем выходы датчиков давления, датчиков положения штоков силовых гидроцилиндров, датчиков скорости вращения лебедок соединены с вновь введенными входами системы управления.
Материалы заявки поясняются чертежами, где:
- на фиг.1 представлена блочная схема электрогидравлической системы спускоподъемного устройства водолазного колокола, принятой за прототип;
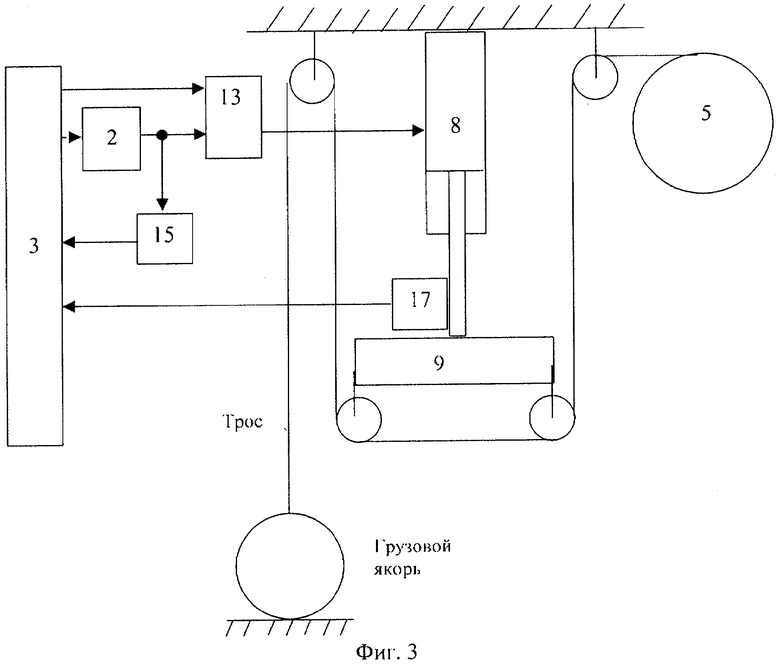
- на фиг.2 представлена блочная схема предлагаемой электрогидравлической системы спускоподъемного устройства водолазного колокола;
- на фиг.3 представлена схема работы компенсатора вертикальной качки.
Сведения, подтверждающие возможность осуществления предлагаемого технического решения с получением вышеуказанного технического результата, заключаются в следующем.
Предлагаемая электрогидравлическая система спускоподъемного устройства водолазного колокола (фиг.2) состоит из регулируемых гидронасосов 1 и 2, системы управления 3, выход которой соединен с управляющими входами регулируемых насосов 1 и 2, первого гидромотора 4, выход которого соединен с лебедкой грузового якоря 5, второго гидромотора 6, выход которого соединен с лебедкой водолазного колокола 7. Также в систему входят первый силовой гидроцилиндр 8, выход которого соединен с компенсатором изменения силы натяжения троса грузового якоря 9 и второй силовой гидроцилиндр 10, выход которого соединен с компенсатором качки водолазного колокола 11. В систему дополнительно введены:
- гидравлическое коммутационное устройство 12, входы которого соединены с выходами каждого регулируемого насоса 1 и 2;
- регулируемый гидронасос 13, вход которого соединен с системой управления 3, а выход - с гидравлическим коммутационным устройством 12;
- датчики давления 14, 15, 16, входы которых подключены к выходам регулируемых насосов, соответственно 1, 2 и 13, а выходы - к системе управления 3;
- датчики 17, 18 положения штоков силовых гидроцилиндров,, входы которых связаны со штоками силовых гидроцилиндров, соответственно 8 и 10, а выходы - с системой управления 3;
- датчики скорости вращения гидромоторов 19, 20 входы которых связаны с выходами гидромоторов, соответственно 4 и 6, а выходы - с системой управления 3.
Предлагаемая электрогидравлическая система работает следующим образом. Операция спуска с корабля на заданную глубину водолазного колокола начинается с опускания на дно грузового якоря. Для этого система управления 3 подает через управляющие входы команду в гидравлическое коммутационное устройство 12, которое подключает один из регулируемых насосов 1 или 2 к первому гидромотору 4, управляющему лебедкой грузового якоря 5. Гидравлическое коммутационное устройство 12 представляет собой набор гидравлической аппаратуры с релейными гидрораспределителями, обеспечивающими по командам от системы управления 3 соединение входных гидромагистралей к выходным гидромагистралям в сочетаниях, определяемых необходимостью выполнения операций с гидравлическим оборудованием при решении задач по его применению. С помощью сигнала датчика 19 скорости гидромотора 4, который поступает в систему управления 3, организуется система управления привода лебедки грузового якоря 5, замкнутого по сигналу, пропорциональному скорости вращения лебедки. В этом случае на вход регулируемого насоса, например 1, подается сигнал, пропорциональный разности заданной и текущей скорости опускания или подъема грузового якоря и гидронасоса, регулируя подачу рабочей жидкости, автоматически обеспечивает постоянство заданной скорости вращения гидромотора 4. При этом точность поддержания скорости на порядок превосходит точность ручного способа управления.
Аналогичным образом организуется управление приводами лебедки 7 водолазного колокола.
Работу системы но компенсации вертикальной качки корабля рассмотрим на примере компенсатора изменения силы натяжения троса грузового якоря (фиг.3). На фиг.3 (обозначения соответствуют фиг.2) показаны:
2 - регулируемый насос;
3 - система управления;
5 - лебедка грузового якоря;
8 - силовой гидроцилиндр;
9 - компенсатор изменения силы натяжения троса грузового якоря;
12 - гидравлическое коммутационное устройство;
15 - датчик давления;
17 - датчик положения штока силового гидроцилиндра.
После установки грузового якоря на грунт лебедка 5 становится на стопор и система управления 3 подключает через гидравлическое коммутационное устройство 12 один из регулируемых насосов, например 2, к силовому гидроцилиндру 8 и создает в рабочей полости силового гидроцилиндра 8 давление, заданное системой управления 3, соответствующее требуемой силе натяжения тороса. Это давление измеряется датчиком давления 15, сигнал которого поступает в систему управления 3. В системе управления 3 формируется сигнал управления, пропорциональный разности между заданным давлением и давлением, измеряемым датчиком давления 15. Этот сигнал поступает на вход регулируемого насоса 2, образуя систему поддержания заданного давления в рабочей полости силового гидроцилиндра 8. При вертикальной качке корабля при повышении силы натяжения троса повышается давление в рабочей полости силового гидроцилиндра 8, измеряемое датчиком давления 16, и система управления 3 уменьшает подачу регулируемого насоса 2, уменьшая давление в рабочей полости силового гидроцилиндра 8. Поршень гидроцилиндра 8 перемещается в противофазе с качкой корабля, компенсируя влияние качки на силу натяжения троса. При этом датчик 17 положения штока силового гидроцилиндра выдает в систему управления 3 сигнал, пропорциональный перемещению штока силового цилиндра 8 относительно его корпуса.
Компенсатор качки водолазного колокола построен аналогичным образом. Однако в нем управление компенсацией качки водолазного колокола построено по принципу следящего привода, в котором (см. фиг.2) силовой гидроцилиндр 10 следит за изменением положения силового гидроцилиндра 8, работа которого описана выше. В этом случае система управления 3 подает на вход одного из регулируемых насосов сигнал, пропорциональный разности сигналов датчика положения 17 и датчика положения 18. Таким образом, компенсатор качки водолазного колокола, следя за положением компенсатора изменения силы натяжения троса грузового якоря, перемещает водолазный колокол в противофазе с качкой корабля, и тем самым обеспечивает неизменное сохранение положения водолазного колокола относительно грунта. Точность компенсации качки водолазного колокола зависит только от параметров этого следящего привода и практически соответствует точности компенсатора изменения силы натяжения троса грузового якоря, что значительно превосходит точность компенсации качки водолазного колокола, имеющуюся у прототипа.
Для повышения надежности системы в нее включен регулируемый гидронасос 13 с датчиком давления 16, который выполняет резервные функции. Гидросистема построена таким образом, что при выходе из строя любого из регулируемых гидронасосов система управления 3 включает на место вышедшего из строя резервный регулируемый гидронасос 13, который обеспечивает продолжение выполнения задачи спуска-подъема рабочего оборудования.
Предлагаемое техническое решение проверено электронным моделированием, а также макетированием приводов вращения лебедок и компенсаторов качки. Результаты проверки показали, что предлагаемое техническое решение позволило повысить точность поддержания заданной скорости вращения лебедок, повысить точность компенсации вертикальной качки водолазного колокола и повысить надежность системы в целом.
Предлагаемое техническое решение рекомендовано к введению в конструкторскую документацию электрогидравлической системы спускоподъемного устройства водолазного колокола, разрабатываемой для перспективного спасательного судна.
Литература
1. "Судовая система для подъема грузов с глубины", патент РФ, RU 2013302, приоритет 18.04.1991 г.
2. Пояснительная записка к техническому проекту "Комплекс спускоподъемного устройства водолазного колокола для глубоководного водолазного комплекса проекта 10420 (КСПУ ВК-10420), ПКБ "Прогресс", г. Николаев, 1991 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСИСТЕМА СПУСКО-ПОДЪЕМНОГО УСТРОЙСТВА ВОДОЛАЗНОГО КОЛОКОЛА | 2009 |
|
RU2403170C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА НА ПАЛУБЕ КОРАБЛЯ, ПРЕИМУЩЕСТВЕННО ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2141435C1 |
| ТЯГОВОЕ ОБОРУДОВАНИЕ БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИВОДА ЛЕБЕДКИ ТЯГОВОГО ОБОРУДОВАНИЯ | 2009 |
|
RU2408525C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА БРОНИРОВАННОЙ РЕМОНТНО-ЭВАКУАЦИОННОЙ МАШИНЫ | 2014 |
|
RU2553620C1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
Предлагаемое изобретение относится к автоматике регулирования электрогидравлических систем для функционирования спускоподъемных устройств при глубоководных работах, например при работе водолазного колокола, опускаемого с корабля. Электрогидравлическая система управления спускоподъемным устройством водолазного колокола имеет не менее двух регулируемых гидронасосов, систему управления, выходы которой соединены с управляющими входами каждого регулируемого насоса, первый гидромотор, выход которого соединен с лебедкой грузового якоря, второй гидромотор, выход которого соединен с лебедкой водолазного колокола, а также первый силовой гидроцилиндр, выход которого соединен с компенсатором изменения силы натяжения троса грузового якоря, второй силовой гидроцилиндр, выход которого соединен с компенсатором качки водолазного колокола. Система также имеет: гидравлическое коммутационное устройство, входы которого соединены с выходами каждого из указанных регулируемых насосов, выходы соединены с каждыми гидромотором и гидроцилиндром, а управляющие входы - с системой управления; дополнительный регулируемый гидронасос, вход которого соединен с системой управления, а выход - с гидравлическим коммутационным устройством; датчики давления, входы которых подключены к выходам всех регулируемых насосов; датчики положения штоков силовых гидроцилиндров, входы которых связаны со штоками силовых гидроцилиндров; датчики скорости вращения гидромоторов, входы которых связаны с выходами гидромоторов, причем выходы датчиков давления, датчиков положения штоков силовых гидроцилиндров, датчиков скорости вращения лебедок соединены с вновь введенными входами системы управления. Технический результат - повышение точности поддержания заданной скорости вращения лебедок, повышение точности компенсации влияния вертикальной качки корабля на положение водолазного колокола в пространстве и натяжение троса грузового якоря, а также повышение надежности системы в целом. 3 ил.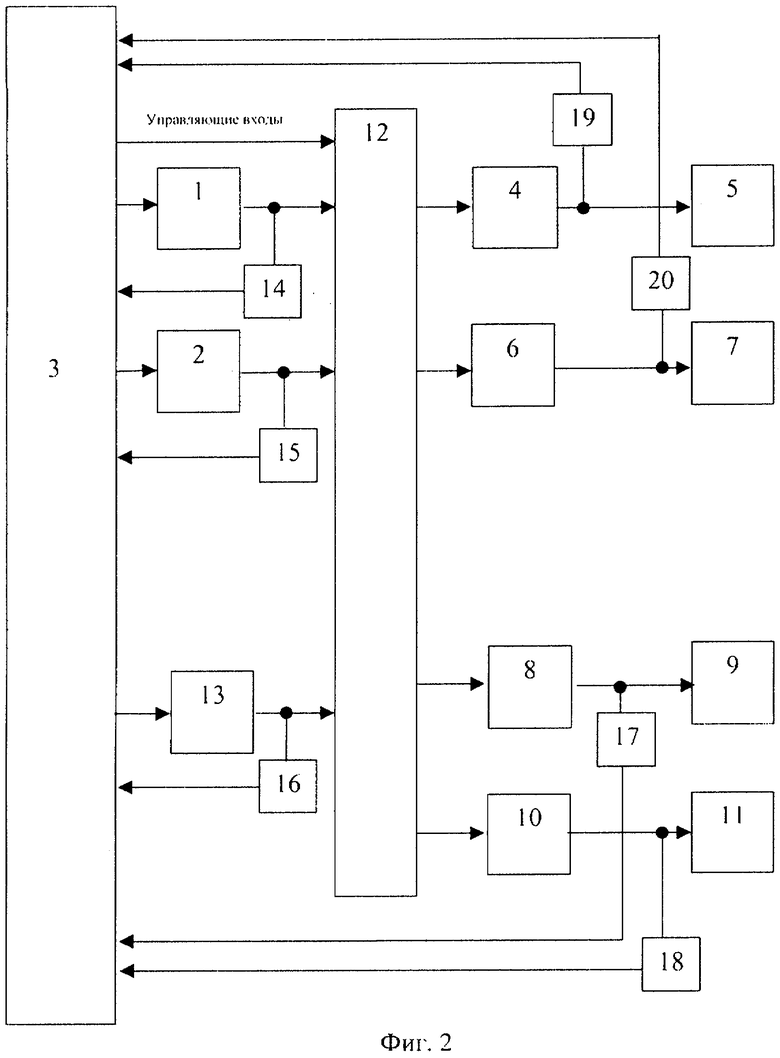
Электрогидравлическая система управления спускоподъемным устройством водолазного колокола, содержащая не менее двух регулируемых гидронасосов, систему управления, выходы которой соединены с управляющими входами каждого регулируемого насоса, первый гидромотор, выход которого соединен с лебедкой грузового якоря, второй гидромотор, выход которого соединен с лебедкой водолазного колокола, а также первый силовой гидроцилиндр, выход которого соединен с компенсатором изменения силы натяжения троса грузового якоря, второй силовой гидроцилиндр, выход которого соединен с компенсатором качки водолазного колокола, отличающаяся тем, что в нее введены гидравлическое коммутационное устройство, входы которого соединены с выходами каждого из указанных регулируемых насосов, выходы соединены с каждыми гидромотором и гидроцилиндром, а управляющие входы - с системой управления; дополнительный регулируемый гидронасос, вход которого соединен с системой управления, а выход с гидравлическим коммутационным устройством; датчики давления, входы которых подключены к выходам всех регулируемых насосов; датчики положения штоков силовых гидроцилиндров, входы которых связаны со штоками силовых гидроцилиндров; датчики скорости вращения гидромоторов, входы которых связаны с выходами гидромоторов, причем выходы датчиков давления, датчиков положения штоков силовых гидроцилиндров, датчиков скорости вращения лебедок соединены с вновь введенными входами системы управления.
| US 5373925 А, 20.10.1994 | |||
| Судовое устройство для спуска и подъема водолазного колокола | 1978 |
|
SU738943A1 |

