(54) СИСТЕМА ПЕРЕДАЧИ ГРУЗА С СУДНА НА СУДНО

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Лебедка для передачи грузов с судна на судно | 1977 |
|
SU695958A1 |
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
1
Изобретение относится к судостроению, в частности, к оборудованию судов средствами, обеспечивающими безударную передачу грузов и людей с судна на судно в условиях морского волнения.
Наиболее близким техническим реше- 5 нием к изобретению является система передачи груза с судна на судно, содержащая установленные на передающем судне лебедку, полиспасты грузового и подтягивающего тросов с подвижными и обводнымн ,0 блоками, связанные тросами с лебедкой и с грузом, гидроцнлиндры, полости которых сообщены с пневмогидроаккумуляторами и с магистралями гидросистемы, при этом их щтоки кинематически связаны с подвижными блокамн полиспастов, а также уста- 5 новленный на принимающем судне канифас-блок. Указанная система имеет два; режима работы: подготовительный и слежения. В подготовительном режиме при взаимных перемещениях взаимодействую- 20 щих судов ипорщень гидроцилиндра полиспаста подтягивающего троса перемещается относительно своего среднего положення в гидроцилиндре, поддерживая натяжение в подтягивающем тросе. В режиме слеження поршень гидроцилиндра полиспаста подтягивающего троса затормаживается и начинает работать поршень гидроцилиндра полиспаста грузового троса, приводящий в движение жестко связанные с ним обоймы подвижных блоков полиспастов 1.
Недостатком данной системы является то, что ввод и вывод груза в режим и из режима слеження производится за очень короткое время, определяемое временем перемещения золотников гидросистемы, управляющих работой системы. Для определенных положений взаимодействующих судов перемещения груза в момент смены режимов работы могут быть весьма значительным, что приводит к большим величинам ускорений и, как следствие, к большим инерционным нагрузкам в проводке системы. Указанные недостатки снижают безопасность работы системы, а также ограничивают область ее применения.
Цель изобретения - повышение надежности путем обеспечения плавного перехода из подготовительного режима в режнм слежения и обратно.
Цель достигается тем, что система снабжена поворотно установленным на передающем судне коромыслом, с направляющими, в которых установлена каретка с дополнительным гидроцилиндром, закрепленным на коромысле, и щарнирно закрепленным на передающем судне качающимся гидроцилиндром, полость которого сообщена с полостью гидроцилиндра полиспаста грузового троса, а щток которого шарнирно связан с кареткой, которая шарнирно соединена со щтоком дополнительного гидроцилиндра, причем шток гидроцилиндра полиспаста подтягивающего троса щарнирно соединен с коромыслом.
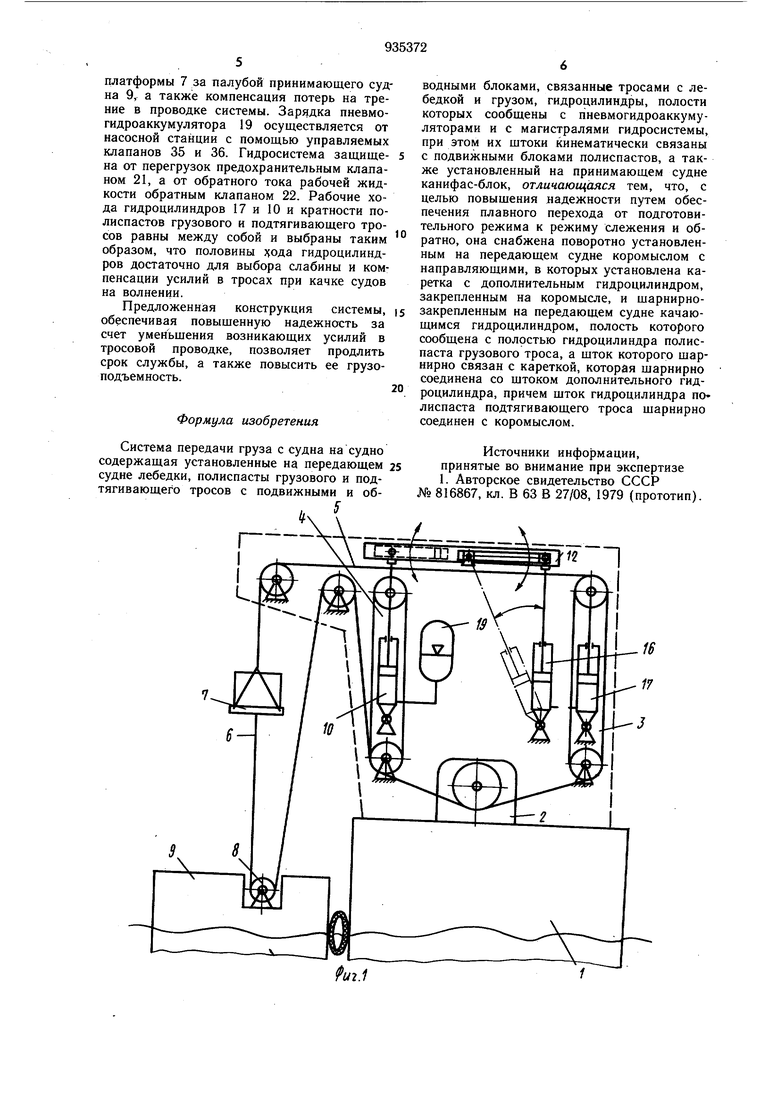
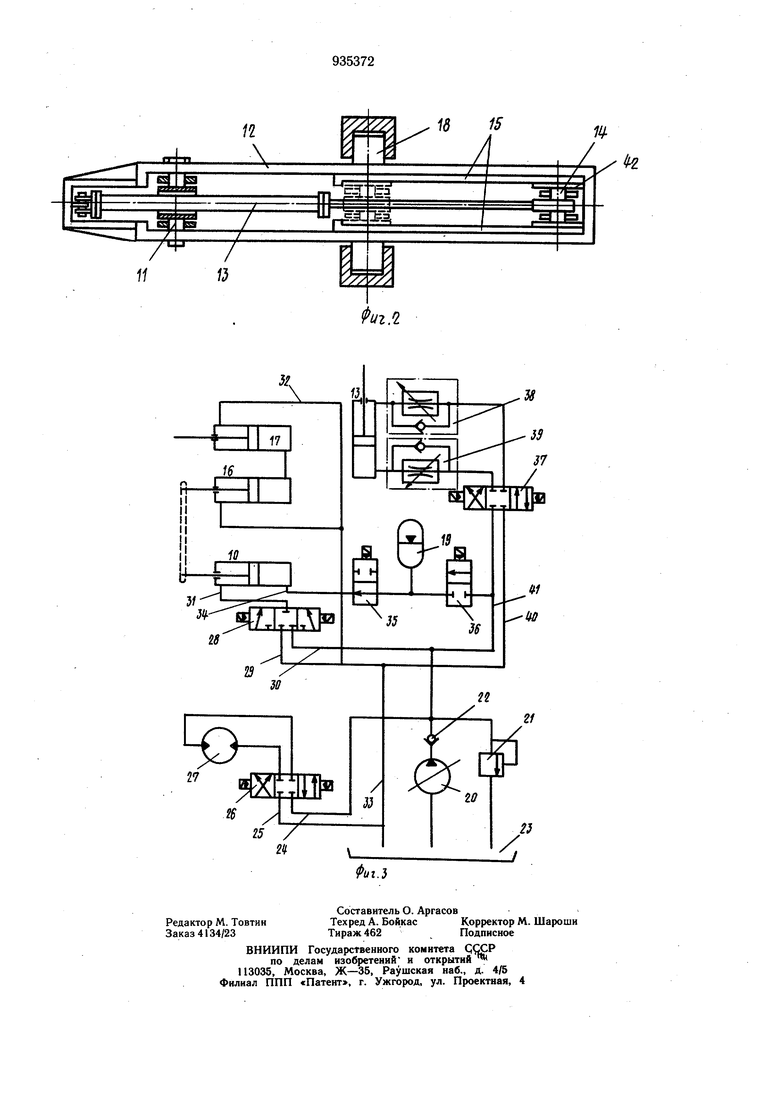
На фиг. 1 изображена конструктивная схема системы; на фиг. 2 - конструкция коромысла; на фиг. 3 - схема гидросистемы.
На передающем судне 1 установлена грузовая гидравлическая лебедка 2 и полиспасты грузового 3 и подтягивающего 4 тросов, через подвижные и обводные блоки которых проведены грузовой 5 и подтягивающий 6 тросы, связанные с грузовой платформой 7. Подтягивающий трос 6 в свою очередь проведен через канифас-блок 8, установленный на палубе прижимающего судна 9. Гидроцилиндр 10 полиспаста 4 подтягивающего троса своим щтоком через неподвижный щарнир 11 связан с коромыслом 12. На коромысле 12 установлен дополнительный гидроцилиндр 13, щтоком своим связанный с подвижным щарниром 14, перемещающимся в направляющих 15. Кроме того, щарнир 14 связан со щтоком качающегося гидроцилиндра 16, порщневая полость которого соединена с порщневой полостью гидроцилиндра 17 полиспаста 3. Коромысло 12 качается вокруг неподвижной оси поворота 18. Порщневая полость гидроцилиндра 10 полиспаста 4 связана с пневмогидроаккумулятором 19. В гидросистему, размещенную на передающем судне 1, входят насосная станция, включающая в себя насос 20 переменной производительности, предохранительный клапан 21, обратный клапан 22 и масляный бак 23. Насосная станция соединена трубопроводами 24 и 25 через электрогидравлический трехпозиционный золотник 26 с реверсивным гидромотором 27, являющимся приводом грузовой лебедки 2. Штоковая полость гидроцилиндра 10 полиспаста 4 подтягивающего троса через трехпозиционный гидравлический распредель 28 трубопроводами 29-31 соединена с насосной станцией. Штоковые полости гидроцилиндра 16 и гидроцилиндра 17 полиспаста 3 грузового троса соединены трубопроводом 32 между собой и со сливной магистралью гидросистемы 33. Порщневая полость гидроцилиндра 10 трубопроводом 34 через управляемые клапаны 35 и 36 соединена с пневмогидроаккумуляторами 19 и насосной станцией. Гидроцилиндр
13 управляется трехпозиционным распределителем 37 с помощью peгyляtopoв расхода 38 и 39 и соединен с насосной станцией трубопроводами 40 и 41. Шарнир 14 установлен в направляющих 15 с помощью каретки 42.
Система работает следующим образом. После щвартовки принимающего судна 9 к передающему судну 1 грузовую платформу 7 гидравлической лебедкой 2 поднимают
над палубой передающего судна 1, крепят к ней подтягивающий трос 6 с заведенным на него канифас-блоком 8, и краном, на котором размещена вся система, выносят за борт. Лебедка 2 управляется распределителем 26. Затем с помощью насоса 20 установкой распределителя 28 сводят полиспаст 4. При этом заряжается пневмогидроаккумулятор 19. Подвижный щарнир 14 в это время находится в центре коромысла 12 и порщень гидроцилиндра 16 неподвижен.
Слабина, возникщая в подтягивающем тросе 6, позволяет закрепить на принимающем судне 9 канифас-блок 8, после чего распределитель 28 переводится, соединяя щтоковую полость гидроцилиндра 10 со сливом. Под действием давления в пневмогидроаккумуляторе 19 порщень гидроцилиндра 10 занимает новое положение, выбирая слабину подтягивающего троса 6. Далее порщень гидроцилиндра 10 колеблется в такт колебаниям принимающего судна 9 поддерживая
в подтягивающем тросе б натяжение, определяемое давлением зарядки пневмогидроаккумулятора 19. Система готова к передаче груза.
Включением распределителя 37 с помощью регулятора расхода 39 перемещают
подвижный щарнир 14 из центра поворота к концу плеча коромысла 12. При этом порщень гидроцилиндра 16 начинает колебаться с постепенно возрастающей амплитудой, одновременно приводя в колебательное движение порщень гидроцилиндра 17 полиспаста 3, что, в свою очередь, обусловливает колебания грузовой платформы 7 также с постепенно возрастающей амплитудой. Максимальная амплитуда колебаний грузовой платформы 7, равная амплитуде относительных колебаний взаимодействующих судов и амплитуде перемещения подтягивающего троса 6, получается в момент достижения подвижным щарниром 14 крайнего положения когда расстояния от центра поворота ко
ромысла 12 до подвижного 14 и неподвижного 11 щарниром становятся равными. Далее распределитель 37 переводится и грузовая платформа 7 гидравлической лебедкой 2 в режиме слежения опускается на палубу принимающего судна 9.
Передача груза с судна 9 на судно 1 производится в обратном порядке. Давление в пневмогидроаккумуляторе 19 выбирается из расчета обеспечения слежения
платформы 7 за палубой принимающего судна 9, а также компенсация потерь на трение в проводке системы. Зарядка пневмогидроаккумулятора 19 осуществляется от насосной станции с помощью управляемых клапанов 35 и 36. Гидросистема защищена от перегрузок предохранительным клаланом 21, а от обратного тока рабочей жидкости обратным клапаном 22. Рабочие хода гидроцилиндров 17 и 10 и кратности полиспастов грузового и подтягивающего тросов равны между собой и выбраны таким образом, что половины )од.а гидроцилиндров достаточно для выбора слабины и компенсации усилий в тросах при качке судов на волнении.
Предложенная конструкция системы, обеспечивая повыщенную надежность за счет уменьшения возникающих усилий в тросовой проводке, позволяет продлить срок службы, а также повысить ее грузоподъемность.
Формула изобретения
Система передачи груза с судна на судно содержащая установленные на передающем 25 судне лебедки, полиспасты грузового и подтягивающего тросов с подвижными и обводными блоками, связанные тросами с лебедкой и грузом, гидроцилиндры, полости которых сообщены с пневмогидроаккумуляторами и с магистралями гидросистемы, при этом их щтоки кинематически связаны с подвижными блоками полиспастов, а также установленный на принимающем судне канифас-блок, отличающаяся тем, что, с целью повыщения надежности путем обеспечения плавного перехода от подготовительного режима к режиму слежения и обратно, она снабжена поворотно установленным на передающем судне коромыслом с направляющими, в которых установлена каретка с дополнительным гидроцилиндром, закрепленным на коромысле, и щарнирнозакрепленным на передающем судне качающимся гидроцилиндром, полость которого сообщена с полостью гидроцилиндра полиспаста грузового троса, а шток которого шарнирно связан с кареткой, которая щарнирно соединена со щтоком дополнительного гидроцилиндра, причем шток гидроцилиндра полиспаста подтягивающего троса шарнирно соединен с коромыслом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 816867, кл. В 63 В 27/08, 1979 (прототип). г-
