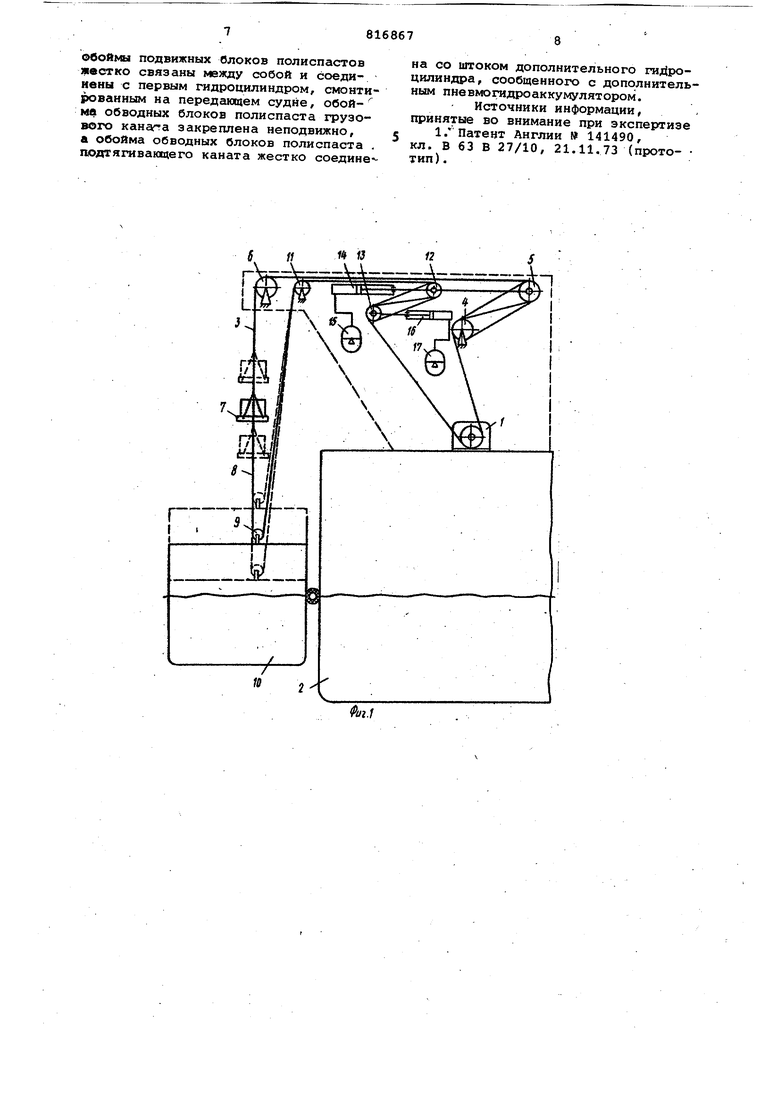
Изобретение относится к области судостроения и, в частности, к системам для безударной передачи груза с судна на судно в условиях волнения моря. Известна система для безударной передачи груза с судна на судно в ус ловиях волнения моря, содержащая грузовую лебедку с барабаном, трособлочную систему, включаю-1ую канафас-блок и, по крайней мере, два полиспаста с подвижными и обводными блоками, гидросистему- с пневмогйдрраккумулятором и гидроцилиндром, а также платформу с грузовым и подтягивакщиг м канатами, причем гиДроцилиндр кинематически связан с грузо вым и подтягивающим канатами р. . Недостатком известной системы являются низкие эксплуатационные ка чества и недостаточная надежность. Цель изобретения - улучшение эксплуатационных качеств системы и повышение надежности безударной пер дачи груза. Поставленная цель достигается тем что система снабжена дополнительными гидроцилиндром и пневмогидроаккумул тором, смонтированными на передающе судне, грузовой и подтягивающий кан ты навиты на барабан п узовой лебедки и проведены через обоймы иевд-звижных и обводных блоков полиспаетерв, причем обоймы подвижных блоков полшспастов жестко связаны между )Й и соединены с первым гидроцилиидром, смонтированным на передаквдем судне, обойма обводных блоков полися;§ а грузового каната закреплена не1ад|1 8ижно, а обойма обводных блоков полиспаста подтягивающего каната жестко сю штоком дополнительного гидроцилин а, сообщенного с дополн-ифельным пневмогидроаккумулятором. . На фиг.1 изображена конструктивная схема системы; к-а (г.2 - схема . гидросистемы. Система для передачи груз а содержит rpysetilyio гида авлическую лебедку 1, ушшаяовленную на передающем судне 2 н грузовым канатом 3, провед&н им через обойму обводных блоков 4, обойму подвижных блоков 5 и чей&а блок 6, соединенную с платформе 7, которая в свою очередь, .1Я(Ь ающим канатом 8,проведенным через канифас-блок 9, установленный на пвяуве принимающего судна 10, блок li, через обойму подвижных блоков 12 и обойму обводных блоков 13, соединена также с грузовой лебедкой 1. Обоймы подвижных блоков 5 и 12 полиспастов грузового и подтягивающего канатов жёстко связаны между собой и соединены со штоком гидрса(илиндра 14, поршневая полость которого сообщается с пневмопедроаккумулятором высокого давления 15. Обойма обводных блоков полиспас 1 а грузового каната 3 закреплена неподвижно, а обойма обводных блоков
13полиспаста подтягивающего каната 8 соединена со штоком дополнительного гидроцилиндра 16, поршневая поость которого соединена с дополнительным пневмогите)оаккумулятором низкого давления 17.
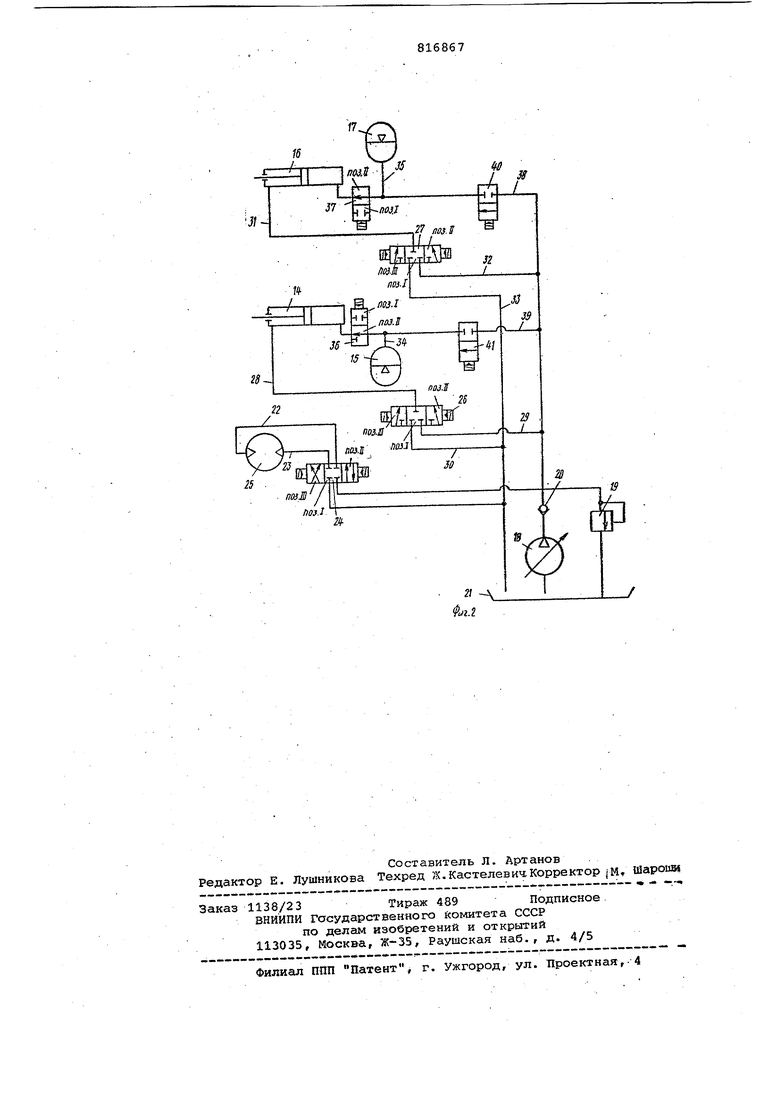
В гидросистему (см.фк,2 ), размещенную на переданяцем судне 2 входят насосная станция, включающая в себя насос переменной производительности 18, предохранительный клапан 19, обратный клапан 20 и масляный бак 21. Насосная станция соединена трубопроводами 22 и 23 через злектрогидравлический трехпозиционный распределитель 24 с реверсивным гидравлическим мотором 25, слу.жащим приводом грузовой лебедки 1 . Штоковые полости гидроцилиндров
14и 16 через трехпозициониые эЛектрогищ авлические распределители 26
и 27 трубопроводами 28-ЗОи3133 соединены с насосной станцией.
Поршневые полости гидроцилиндров 14 и 16 трубопроводами 34 и 35 через двухпозиционные электрогидравлические распределители 36 и 37 соединены соответственно с пнёвмогндроаккумуляторами высокого давления 15 и низкого давления 17, а трубопроводгими 38 и 39 через двухпозиционные зле ктро гидравлические распределители 40 и 41 также с насосной станцией.
Система может быть установлена на стрелбвом или вьщвижном кране передающего судна, причем направляющие блоки 6 и 11 устанавливаются на ноке стрелы или консоли крана.
Работает система следующим образом.
После швартовки приним-нвдего судна 10 к передающему судну 2 платформу 7 с установленным на ней грузом на малой скорости приподнимают над палубой переданвдего судна 2.Подъем производится грузовой гидравлической лебедкой 1 с помощью гидромотора 2,5, получающего питание от насосной станции через злектрогидравлический распределитель 24, установленный в поз. И.
Подтягивакяций трос 8 с заведенным на него канифас-блоком 9, находящимся пока на борту передающего судна 2, крепят к основанию грузовой платформы 7, а на канифас-блок 9 закрепляют бросательный конец, который передают на принимающее судно 2. Затем платформа 7 судовым краном, на котором установлено устройств, выносится 381 борт передающего судна 2.
Перемещением поршня дополнительного гидроцилиндра 16 в крайнее положение сводят обойму обводных блоков 13 с обоймой подвижных блоков 12 полиспаста подтягивающего канта 8, тем самым создавая слабину в подтягивающем канате 8, которая выбирается с принимающего судна 2 с помощью бростельного .конца. При этом канифасблок передается на принимакнцее судно, 2. ,
Полиспаст подтягивающего кайата 8 рассчитан таким образом,что при сведенных обоймах 12 и 13 создается слабина,исключающая рывок при взаимных перемещениях судов на морском Волнении. Перемещение поршня дополнительного гидроцилиндра 16 в крайнее положение осуществляется с помощью насосной станции включение электрогидравлическОго распределителя 27 в поз. И . ВО время перемещения поршня заряжается пневмогидроаккумулятор 17 низкого давления.
После передачи и закрепления канифас-блок 9 на палубе принимаквдего судна 10 штоковую полость дополнительного гидроцилиндра 16 включением электрогидравлического распределителя 27 в поз. Ш соединяют со сливом. При этом под действием давления в пневмогидроаккумуляторе 17 поршень занимает новое положение, выбрав слабину в подтягивающем канате 8.
При взаимных перемещениях передающего и принимающего судов поршень гидроцилиндра 16 перемещается относительно своего среднего положения в гидроцилиндрё, поддерживая натяжение в подтягивающем канате 8, определяемое величиной давления .зарядки пневмогидроаккумулятора 17. Ход поршня гидроцилиндра 16 при эТом , равен отношению удвоенного относи- тельного перемещения судов к кратности полиспаста подтягивающего каната 8.4.,
Система готова к передаче груза.
Включением злектрогидравлического распределителя 24 в поз.Ш грузовой лебедкой 1 пропускают платформу с грузом 7 на расстояние, исключающее возможность-соударения грузовой платформы 7 с ноком стрелы и консолью судового крана при введении устройства в режим слежения за палу бой принимающего судна 10. Это расстояние определяется максимальным пе ремещением принимающего судна 10 от носительно передающего судна 2. Затем система вводится в режим слежения . Для зтого одновременной установкой распределителей 27 и 37 в поз.
1, распределителя в поэ Ц и распределителя 26 в поз-Ш тормозится поршень гидроцилиндра 16, и соответственно, жестко связанная сним обойма обводных блоков 13 полиспаста подтягивающего каната 8 и.растормаживается поршень гидроцилиндра 14, приводящий в движение жестко связанные с ним обоймы подвижных блоков 5 и 12 полиспастов грузового и подтягивающего канатов.
Вследствие взаимного перемещения судов на волнении в грузовом и подтягивакяцем Манатах возникает слабина или усилие, воздействующее на обоймы подвижных блоков 5 и 12. Под воздействием возникшего усилия жестко связанный U обоймами 5 и 12 поршень гидроцилиндра 14 пере1адщается, преодолевая усилие со стороны поршневой полости гидродилиндрй, соединенной с пневмоаккумуляторомД5 высоко ги давления.
При уменьшении натяжения в каната 3 и 8 поршень гидроцилиндра 14 под действием давления в пневмбаккумулятор 15 перемещается назад, выбирая слабину.
В такт с перемещениями поршня колеблется связанная с грузовым и подтягивающим канатами грузовая платформа 7, осуществляя слежение за палубой принимающего судна.
Грузовая лебедка 1 продолжает работать на спуск, постепенно опуская грузовую платформу 7 на палубу принимающего судна 2,
При подходе платформы с грузом 7 к палубе принимающего судна 2 скорость опускания снижается с целью обеспечения мягкой посадки.
Платформа с посадочной скоростью опускается на палубу принимающего судна 2, где освобождается от передаваемого груза.
Подъем платформы 7 с грузом или без груза производится в обратном порядке.
Грузовая лебедка включается электрогидравлическим распре делителем 24 на подъем поз.И . Послеподъема платформы 7 на высоту, при которой устройство вводилось в режим слежения, одновременным переключениём распределителей 26 и 38 в поз.1 распределителя 27 в поз. Ш, а распределителя 37.в поз.И затормаживается поршень гидроцилиндра 14 и растормаживается поршень дополнительного гидродилиндра 16.
Система выводится из режима слежения. Грузовая лебедка продол:кает работать, поднимая платформу 7 к ноку стрелы или консоли крана на высоту, позволякицую завести ее на палубу передающего судна 2. При этом поршен гидроцилиндра 16 продолжает перемещаться в такт с колебаниями палубы принимающего судна 10.
При подъеме платформы 7 на необходимую высоту переключением распределителя 27 в поз П обоймы полиспаста подтягивающего каната 12 и 13 сводятся, создавая провивание последнего, что дает возможность , завести платформу 7 на палубу передающего судна 2,
Регулирование скорости подъема- спуска грузовой гидравлической лебедки 1 производится при помощи изoменения расхода регулируемого насоса 18, обеспечивающего вращение ревесивного гндромотора 25.
Давление в пневмогидроаккумуляторе 15 выбирается из расчета удержания
5 груза и создания небольшого дополHHTeJjbHoro натяжения в ipvsoBOM и подтягивакнцем канатах.
величина этогчэ натяжения обусловлена кратностью ттрлиспастов и жест0костями грузового и подтягивающего канатов.
Эти же два фактора обуславливают выбор давления зарядки и для пневмогидроаккумулятора 17. Зарядка пневмогидроаккумуляторов 15 и 17
5 производится от насосной станции с помощью электрогидравлических распределителей 40 и 41.
Гидросистема защищена от перегрузок предохранительным клапаном 19,
0 а от обратного тока раб;очей жидкости обратным клапаном 1В.
Рабочие хода гиддооцилиндоов 14 и 16 и кратности полиспастов грузово5го и подтягигакхцего канатов выбраны таким образом, что половины хода достаточно для выбора слабины и компен сации усилий в канатах при качке судов на волнении.
0
Формула изобретения
Система для безударной передачи груза с судна на судно в условиях волнени моря, содержащая грузовую лебедку с барабаном, трособлочную систему, включающую канифас-блок и, по меньшей мере, два полиспаста с подвижными и обводнымблоками, гидроситему с пневмогидроаккумулятором и гидроцилиндром, а также платформу с грузовыми и подтягивающими канатами, с которыми гидроцилиндр кинематически связан, отличающаяся тем, что, с целью улучшения эксплуатационных качеств и повьшения надежности безударной передачи rpv3a. система снабжена дополнительными гидроцилиндром и пневмогидроаккумулятором, смонтированными на передающем судн, грузовой и подтягивающие канаты навиты на барабан грузовой лебедки и проведены чеоез обоймы подвижных и обводных блоков полиспатов, причи .
ебоймы подвижных блоков полиспастов жестко связаны между собой и соединены с первым гидроцилиндром, смонтированным на передающем судне, обойMQ обводных блоков полиспаста грузового каната закреплена неподвижно, а обойма обводных блоков полиспаста . подтягивающего каната жестко соединена со штоком дополнительного ги4роцилиндра, сообщенного с дополнительным пневмогидроаккумулятором. Источники информации, принятые во внимание при экспертизе 1. Патент Англии 141490,
кл. в 63 в 27/10, 21.11.73 (прото- тип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1977 |
|
SU747769A1 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
f4 fj
S п
16
25
19
