Изобретение относится к судостроению, в частности к системам для безударной передачи груза с судна на судно в условиях волнения моря.
Известна система для безударной передачи груза с судна на судно в условиях волнения моря, содержащая грузовую лебедку с барабаном, трособлочную систему, включающую канифас-блок и полиспасты грузового и подтягивающего канатов с подвижными и обводными блоками, гидросистему с пневмогидроаккумуляторами высокого и низкого давлений и гидроцилиндрами, платформу с грузовым и подтягивающим канатами, кинематически связанными с гидроцилиндрами полиспастов, и коромысло с размещенным на нем сервоприводом I.
Недостаток известной системы - недостаточная надежность ее в работе.
Цель изобретения - повыщение надежности и безопасности путем снижения статических и динамических нагрузок в трособлочной системе.
Для достижения этой цели в системе для безударной передачи груза с судна на судно в условиях волнения моря, содержащей грузовую лебедку с барабаном, трособлочную систему, включающую канифас-блок и полиспасты грузового и подтягивающего канатов с подвижными и обводными блоками, гидросистему с пневмогидроаккумуляторами высокого и низкого давлений и гидроцилиндрами, платформу с грузовым и подтягивающим канатами, кинематически связанными с гидроцилиндрами полиспастов и коромысло с размещенным на нем сервоприводом, щток гидроцилиндра полиспаста грузового каната щарнирно соединен с Коромыслом, а порщневые полости гидроцилиндров полиспастов грузового и подтягивающего канатов сообщены соответственно с пневмогидроаккумуляторами высокого и низкого давлений.
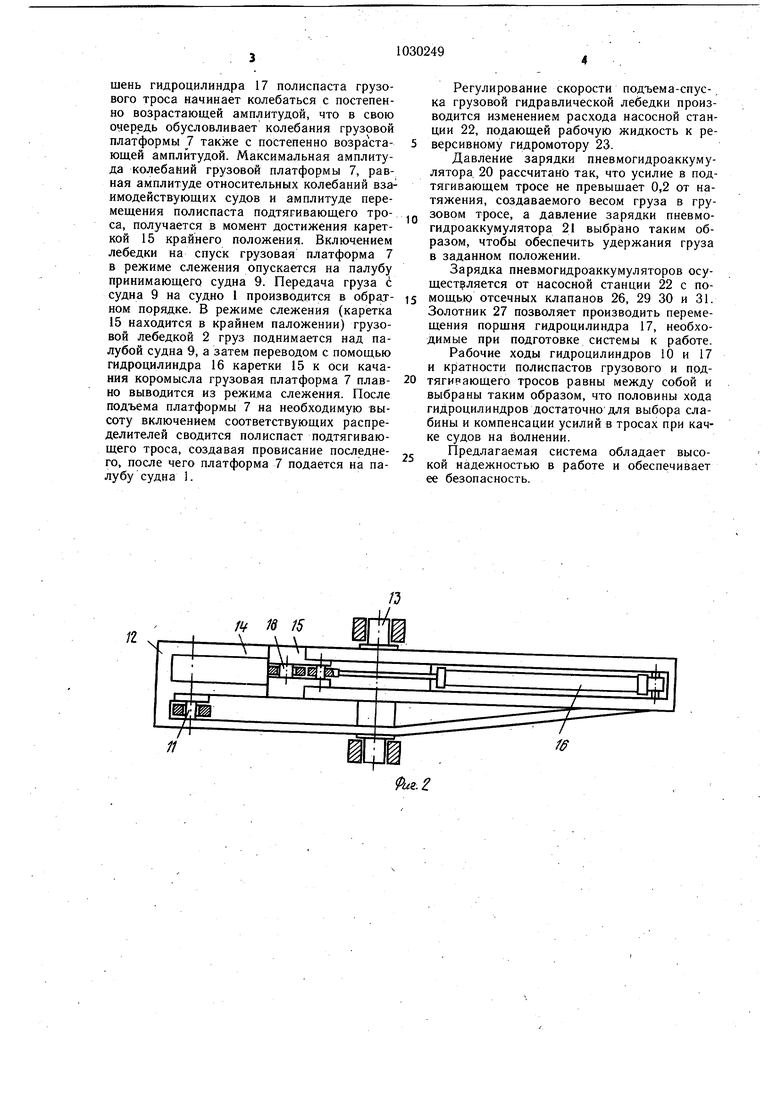
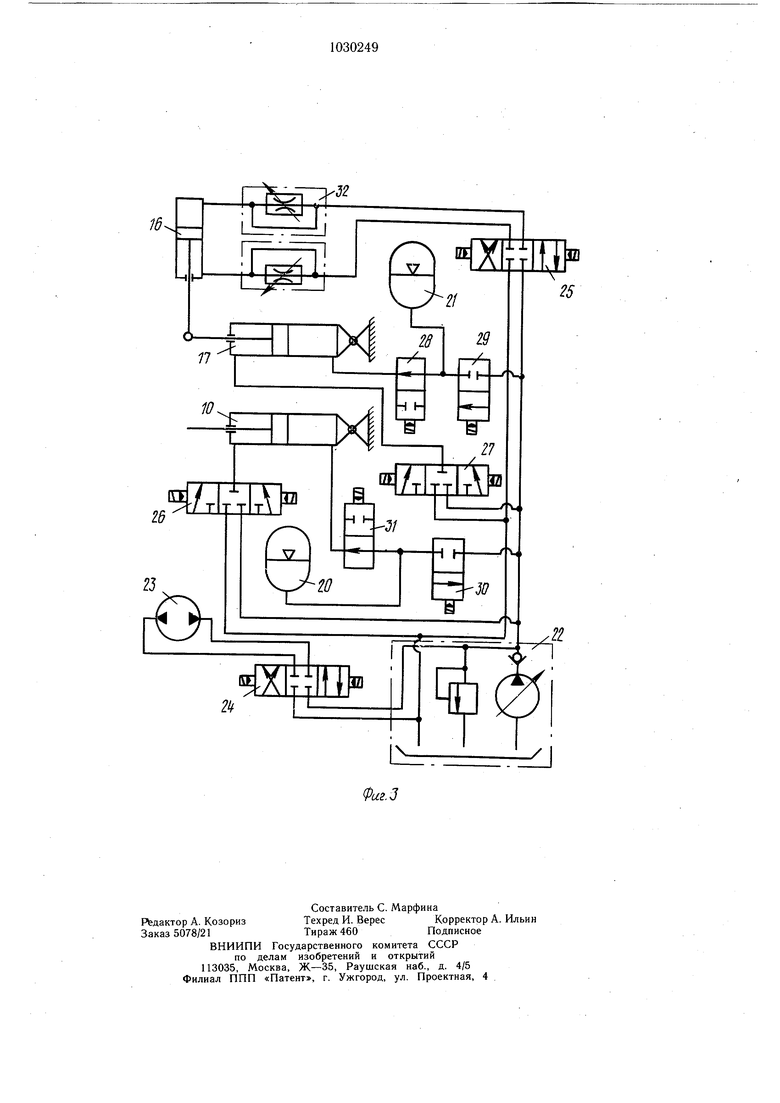
На фиг. 1 изображена конструктивная схема предлагаемой системы; на фиг. 2 - конструкция коромысла с кареткой и дополнительным гидроцилиндром; на фиг. 3 - схема гидросистемы.
На передающем судне 1 установлена грузовая гидравлическая лебедка 2 и полиспасты грузового 3 и подтягиващего 4 тросов, через обводные и подвижные блоки ко-, торых проведены грузовой 5 и подтягивающий 6 тросы, связанные с грузовой платформой 7. Подтягивающий трос 6 в свою очередь проведен через канифас-блок 8, установлены на принимающем судне 9. Шток гидроцилиндра 10 полиспаста подтягивающего троса соединен через неподвижный щар. нир 11 с коромыслом 12, качающимся вокруг неподвижной оси 13. Коромысло снабжено направляющими 14, в которых перемещается каретка 15, приводимая в движение гидроцилиндром 16. Шток гидроцилиндра 17 полиспаста грузового троса соединен через
щарнир 18 с кареткой 15. Обводной блок
19служит для обеспечения благоприятных условий навивки грузового троса на барабан лебедки 2. Порщневые полости гидроцилиндров 10 и 17 соответственно связаны с пневмогидроаккумуляторами 20 и 21 низкого и высокого давлений.
В гидросистему, размещенную на передающем судне 1, входит насосная станция
Q 22, реверсивный гидромотор 23, гидроцилиндры 10, J6 и 17, пневмогидроаккумуляторы
20и 21, золотники 24, 25, 26 и 27 управления, а также отсечные клапаны 28-31. Скорость перемещения порщня гидроцилиндра 16 регулируется с помощью блока 32
5 дросселей.
Работает система следующим образом.
После швартовки принимающего судна
9 к передающему судну 1 платформу 7
с установленным на ней грузом гидравличес° кой лебедкой 2 поднимают над палубой передающего судна 1, крепят к ней подтягивающий трос 6 с заведенным на него канифас-блоком 8 и краном, на котором размещена вся система, выносят за борт.
5 Спуск и подъем груза осуществляется с помощью гидромотора 23, управляемого золотником 24.
Система имеет два режима работы: подготовительный и режим слежения.
В подготовительном режиме каретка 15
0 находится на оси качания коромысла, что обеспечивает неподвижность обойм полиспаста грузового троса. С помощью насосной станции 22 установкой золотника 26 в соответствующую позицию вводят полиспаст подтягивающего троса. Образующаяся слабина троса дает возможность закрепить канифас-блок 8 на палубе принимающего судна 9. При сведении полиспаста заряжается пневмогидроаккумулятор 20. Отсечный клапан 30 при этом закрыт, а клапан 31 открыт. После закрепления канифас-блока 8 на палубе судна 9 с помощью золотника 26 соединяет щтоковую полость гидроцилиндра 10 со сливом. Под действием давления в пневмогидроаккумуляторе 20 порщень гидроцилиндра 10 занимает новое положение,
5 выбирая слабину подтягивающего троса 6. Далее порщень гидроцилиндра 10 колеблется в такт колебаниям принимающего судна 9, поддерживая в подтягивающем тросе 6 натяжение, определяемое давлением зарядки пневмогидроаккумулятора 20 низкого дав
0 Ленин. Система готова к передаче груза. Груз с судна на судно передается в режим слежения, который начинается с установки золотника 25 в позицию, обеспечивающую перемещение порщня дополнительного гидроцилиндра 16 и соответственно каретки 15 от оси качания коромысла 12 в крайнее положение.
, По мере перемещения каретки 15 по направляющим 14 вдоль коромысла 12 поршень гидроцилиндра 17 полиспаста грузового троса начинает колебаться с постепенно возрастающей амплитудой, что в свою очередь обусловливает колебания грузовой платформы 7 также с постепенно возрастающей амплитудой. Максимальная амплитуда колебаний грузовой платформы 7, равная амплитуде относительных колебании взаимодействующих судов и амплитуде перемещения полиспаста подтягивающего троса получается в момент достижения кареткой 15 крайнего положения. Включением лебедки на спуск грузовая платформа 7 в режиме слежения опускается на палубу принимающего судна 9. Передача груза t судна 9 на судно 1 производится в обратном порядке. В режиме слежения (каретка 15 находится в крайнем паложении) грузовой лебедкой 2 груз поднимается над палубой судна 9, а затем переводом с помощью гидроцилиндра 16 каретки 15 к оси качания коромысла грузовая платформа 7 плавно выводится из режима слежения. После подъема платформы 7 на необходимую высоту включением соответствующих распределителей сводится полиспаст подтягивающего троса, создавая провисание последнего, после чего платформа 7 подается на палубу судна 1.
Регулирование скорости подъема-спус-, ка грузовой гидравлической лебедки производится изменением расхода насосной станции 22, подающей рабочую жидкость к реверсивному гидромотору 23.
Давление зарядки пневмогидроаккумулятора 20 рассчитано так, что усилие в подтягивающем тросе не превышает 0,2 от натяжения, создаваемого весом груза в грузовом тросе, а давление зарядки пневмогидроаккумулятора 21 выбрано таким образом, чтобы обеспечить удержания груза в заданном положении.
Зарядка пневмогидроаккумуляторов осуществляется от насосной станции 22 с пос мощью отсечных клапанов 26, 29 30 и л. Золотник 27 позволяет производить перемещения поршня гидроцилиндра 17, необходимые при подготовке системы к работе Рабочие ходы гидроцилиндров Ш и 1/ и кратности полиспастов грузового и прд0 тягирающего тросов равны между собой и выбраны таким образом, что половины хода гидроцилиндров достаточно для выбора слабины и компенсации усилий в тросах при качке судов на волнении.
Предлагаемая система обладает высокой надежностью в работе и обеспечивает
5 ее безопасность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| УСТРОЙСТВО ДЛЯ БЕЗУДАРНОЙ ПОГРУЗКИ ГРУЗА НА ПАЛУБУ СУДНА ПРИ ВОЛНЕНИИ МОРЯ | 1973 |
|
SU368111A1 |
| Устройство для передачи грузов с одного судна на другое в условиях открытого моря | 1975 |
|
SU549378A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Гидроподъемник для приема передачи груза с канатной дороги | 1976 |
|
SU686935A1 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Судовое грузовое устройство для безударной передачи груза в море | 1985 |
|
SU1255508A1 |
| Устройство для передачи груза | 1961 |
|
SU151941A1 |
СИСТЕМА ДЛЯ БЕЗУДАРНОЙ ПЕРЕДАЧИ ГРУЗА С СУДНА НА СУДНО В УСЛОВИЯХ ВОЛНЕНИЯ МОРЯ, содержащая грузовую лебедку с барабаном, трособлочную систему, включающую канифасблок и полиспасты грузового и подтягива// / ющего канатов с подвижными и обводными блоками, гидросистему с пневмогидроаккумуляторами высокого и низкого давлений и гидроцилиндрами, платформу с грузовым и подтягивающим канатами, кинематически связанными с гидроцилиндрами полиспастов и коромысло с размещенным на нем сервоприводом, отличающаяся тем, что, с целью повьшения надежности и безопасности путем снижения статических и динамических нагрузок в трособлочной системе, щток гидроцилиндра полиспаста грузового каната щарнирно соединен с коромыслом, а поршневые полости гидроцилиндров полиспастов грузового и подтягивающего канатов сообщены Соответственно с пневмогидроаккумуляторами высокого и низкого давлений. (Л со о 1C 4 ) и/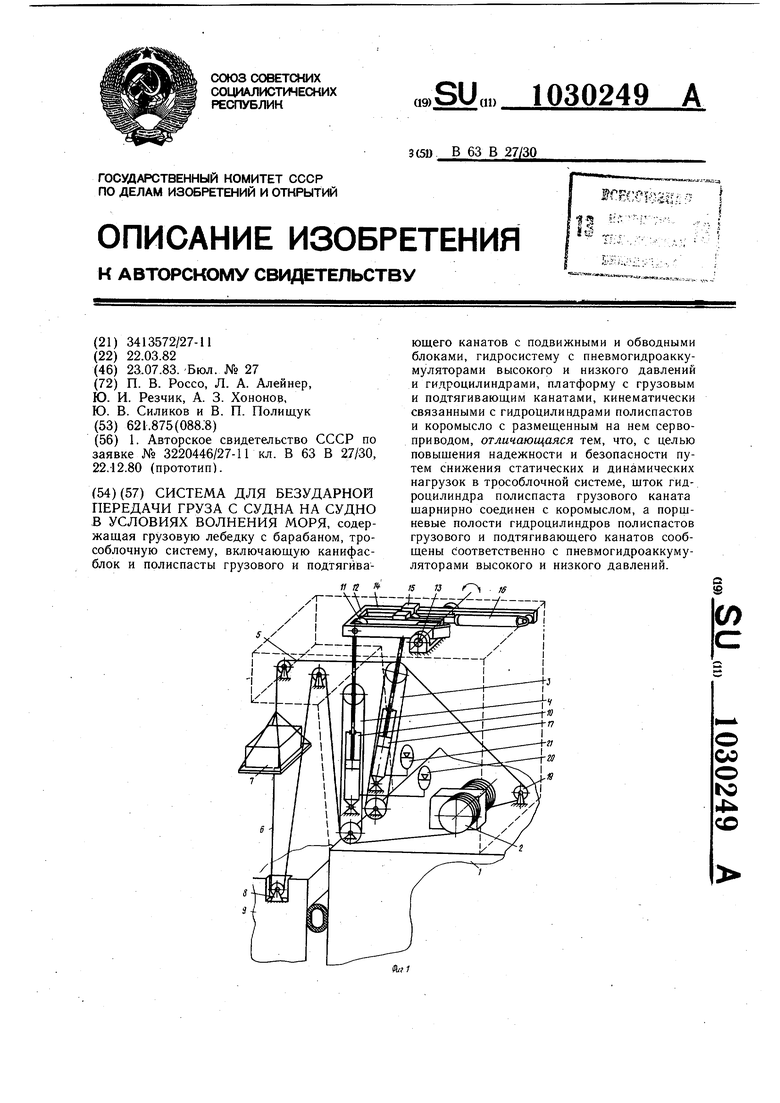
/V / л.. /5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3220446/27-1 Г кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
