Изобретение относится к области управления наведением летательных аппаратов (ЛА) и может быть использовано для формирования в процессе наведения спускаемого аэробаллистического ЛА в заданную точку земной поверхности (точку цели) различных траекторий спуска заданной конфигурации.
Известен способ формирования траекторий спуска аэробаллистического ЛА в заданную точку цели - навесных, настильных, подлетных с заданного направления и др. [1], включающий задание требуемого направления вектора конечной скорости ЛА в точке цели, построение целевой системы координат, связанной с заданным направлением конечной скорости, формирование программ требуемых ускорений ЛА в проекциях на картинную плоскость наведения, нормальную к направлению конечной скорости, нахождение закона изменения параметров управления спускаемым ЛА из динамических уравнений движения ЛА с определением действительных параметров движения ЛА с помощью бортовой навигационно-измерительной системы.
Недостаток известного способа заключается в том, что он не позволяет в полной мере реализовать маневренные возможности спускаемого ЛА и сформировать траектории спуска специального вида - спиралевидные с вращением в прямом (по часовой стрелке) или в обратном направлении, спиралевидные траектории с изменением направления вращения в процессе спуска, спиралевидные навесные или настильные траектории спуска, спиралевидные подлетные траектории с заданного направления и др. при обеспечении высокой точности доставки ЛА в точку цели.
Целью изобретения является реализация маневренных возможностей спускаемых аэробаллистических ЛА путем формирования специальных траекторий спуска - спиралевидных различной конфигурации.
Указанная цель достигается тем, что в процессе управления спуском ЛА осуществляется программное вращение требуемого направления вектора конечной скорости ЛА по образующей прямого кругового конуса с вершиной в точке цели и с заданным углом полураствора в прямом или обратном направлении с заданным периодом вращения при сохранении постоянства угла полураствора конуса и периода вращения или при изменении их по заданной программе.
На фиг.1 показаны плоские траектории спуска ЛА из начальной точки О в точку цели Ц, формируемые в рамках известного способа управления спуском. Пунктиром показана траектория баллистического спуска ЛА без совершения маневра, через Xц и Yц обозначены оси целевой системы координат. Формирование навесной траектории спуска (отмечена цифрой 1) обеспечивается выбором требуемого направления вектора конечной скорости ЛА в точке цели  под заданным углом
под заданным углом  к плоскости горизонта в точке цели. Соответственно, формирование настильной траектории (отмечена цифрой 2) обеспечивается выбором требуемого направления вектора скорости
к плоскости горизонта в точке цели. Соответственно, формирование настильной траектории (отмечена цифрой 2) обеспечивается выбором требуемого направления вектора скорости  под меньшим углом
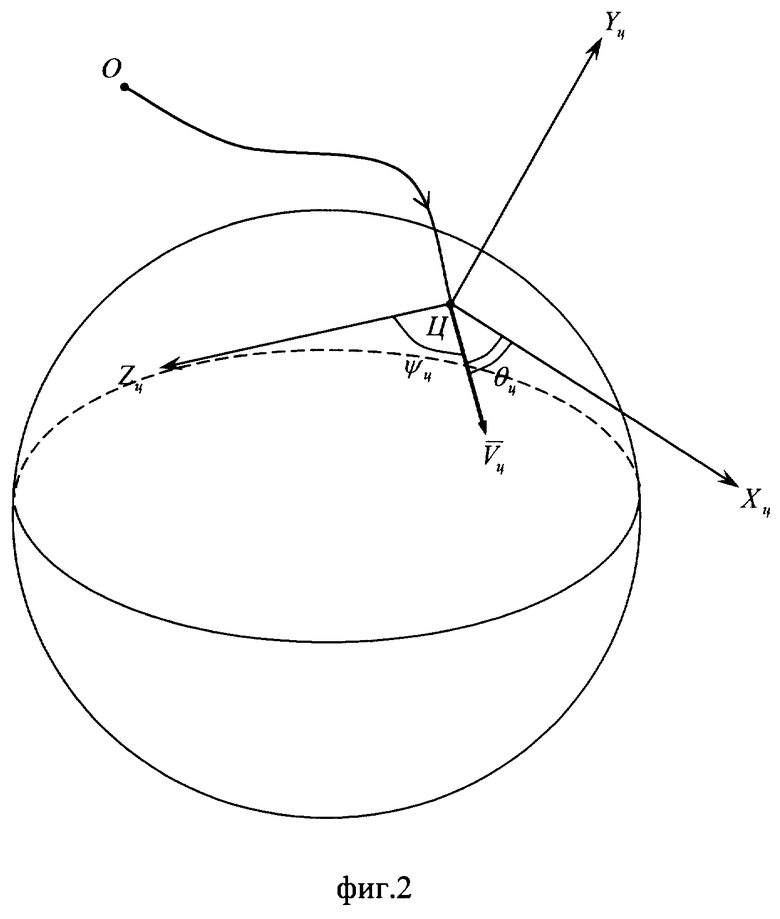
под меньшим углом  . Таким образом, формирование плоских траекторий спуска заданной конфигурации осуществляется в известном способе путем фиксации в алгоритмах наведения угла θц. На фиг.2 показана пространственная траектория спуска, формируемого в рамках известного метода путем задания линии пикирования по направлению вектора конечной скорости ЛА в точке цели, ориентированного под углами θц и ψц (угол бросания и курсовой угол) относительно целевой системы координат ЦХцYцZц таким образом, формирование пространственных траекторий спуска, в том числе подлетных с заданного направления, осуществляется в известном способе путем фиксации в алгоритмах наведения двух углов θц и ψц. На фиг.3 показана схема формирования спиралевидных траекторий спуска ЛА путем программного вращения с периодом Т направления вектора конечной скорости
. Таким образом, формирование плоских траекторий спуска заданной конфигурации осуществляется в известном способе путем фиксации в алгоритмах наведения угла θц. На фиг.2 показана пространственная траектория спуска, формируемого в рамках известного метода путем задания линии пикирования по направлению вектора конечной скорости ЛА в точке цели, ориентированного под углами θц и ψц (угол бросания и курсовой угол) относительно целевой системы координат ЦХцYцZц таким образом, формирование пространственных траекторий спуска, в том числе подлетных с заданного направления, осуществляется в известном способе путем фиксации в алгоритмах наведения двух углов θц и ψц. На фиг.3 показана схема формирования спиралевидных траекторий спуска ЛА путем программного вращения с периодом Т направления вектора конечной скорости  по образующей прямого кругового конуса с вершиной в точке цели Ц и с углом полураствора μ. Направление осевой линии конуса (вектор
по образующей прямого кругового конуса с вершиной в точке цели Ц и с углом полураствора μ. Направление осевой линии конуса (вектор  ) задается углами
) задается углами 
 как это показано на фиг.2. Таким образом, согласно заявленному способу формирования траекторий спуска постоянные значения углов
как это показано на фиг.2. Таким образом, согласно заявленному способу формирования траекторий спуска постоянные значения углов  и
и  заменяются в алгоритмах наведения их переменными значениями, определяемыми зависимостями
заменяются в алгоритмах наведения их переменными значениями, определяемыми зависимостями
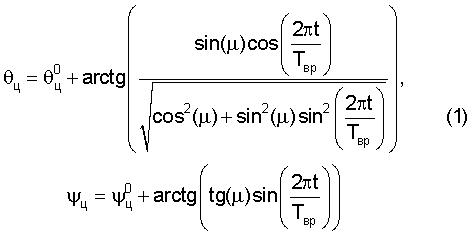
Величины  ,
,  , μ, Т в формулах (1) являются свободными параметрами, выбором которых обеспечивается формирование спиралевидных траекторий спуска с заданной амплитудой и с заданным числом витков спирали на интервале спуска, в том числе спиралевидных навесных и настильных траекторий, спиралевидных траекторий, подлетных к цели с заданного направления и др. Изменение параметров , , μ, Т в процессе спуска по заранее выбранным программам позволяет сформировать спиралевидные траектории спуска более сложных конфигураций, в том числе с изменением максимальной амплитуды и числа витков спирали, с изменением направления вращения по спирали и др.
, μ, Т в формулах (1) являются свободными параметрами, выбором которых обеспечивается формирование спиралевидных траекторий спуска с заданной амплитудой и с заданным числом витков спирали на интервале спуска, в том числе спиралевидных навесных и настильных траекторий, спиралевидных траекторий, подлетных к цели с заданного направления и др. Изменение параметров , , μ, Т в процессе спуска по заранее выбранным программам позволяет сформировать спиралевидные траектории спуска более сложных конфигураций, в том числе с изменением максимальной амплитуды и числа витков спирали, с изменением направления вращения по спирали и др.
Источники информации
1. Разоренов Г.Н. и др. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями): Учебник для вузов / Г.Н.Разоренов, Э.А.Бахрамов, Ю.Ф.Титов. М.,: Машиностроение, 2003, (с.409, 420).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВРЕМЕНЕМ ПРИЛЕТА СПУСКАЕМОГО АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ЗАДАННУЮ ТОЧКУ ЗЕМНОЙ ПОВЕРХНОСТИ | 2008 |
|
RU2388985C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СКРЫТНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В ЗОНЕ ОБНАРУЖЕНИЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2017 |
|
RU2686802C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ ПРЕИМУЩЕСТВЕННО НА КОСМИЧЕСКОМ АППАРАТЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ НА ДВУХСТЕПЕННОЙ ПОВОРОТНОЙ ПЛАТФОРМЕ | 2021 |
|
RU2787277C1 |
| ГИПЕРЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2009 |
|
RU2393978C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПОЛЕТА ИНФОРМАЦИОННОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2597309C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |

Изобретение относится к области управления наведением летательных аппаратов (ЛА) и может быть использовано для формирования в процессе наведения спускаемого аэробаллистического ЛА в заданную точку земной поверхности (точку цели) различных траекторий спуска заданной конфигурации. Способ заключается в формировании спиралевидных траекторий спуска различной конфигурации. При этом в процессе управления спуском ЛА осуществляется программное вращение требуемого направления вектора конечной скорости ЛА по образующей прямого кругового конуса с вершиной в точке цели в прямом или в обратном направлении с заданным постоянным или переменным периодом вращения. Технический результат заключается в возможности реализации маневренных возможностей спускаемых аэробаллистических ЛА путем формирования различных траекторий спуска. 3 ил.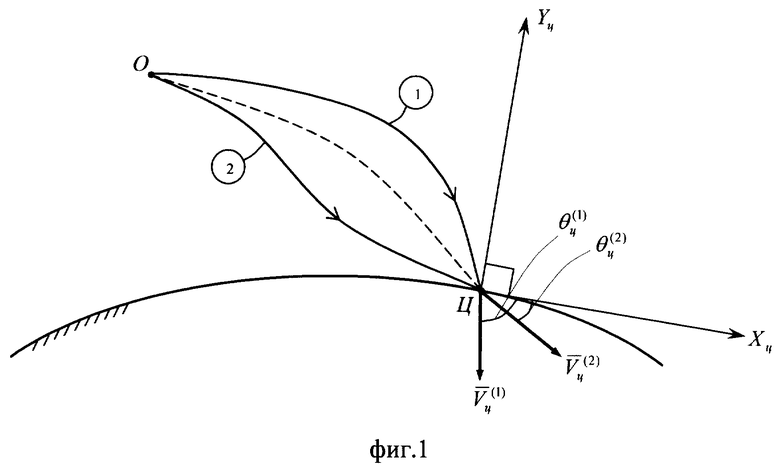
Способ формирования траекторий спускаемого аэробаллистического летательного аппарата (ЛА) требуемых конфигураций при наведении в заданную точку земной поверхности, включающий задание требуемого направления вектора конечной скорости ЛА в точке цели, построение целевой системы координат, связанной с заданным направлением конечной скорости, формирование программ требуемых ускорений ЛА в проекциях на картинную плоскость наведения, нормальной к направлению конечной скорости, нахождение закона изменения параметров управления спускаемым ЛА из динамических уравнений движения ЛА с помощью бортовой навигационно-измерительной системы, отличающийся тем, что формируют спиралевидные траектории спуска различной конфигурации (навесные, настильные и подлетные траектории с заданного направления) путем осуществления программного вращения требуемого направления конечной скорости ЛА по образующей прямого кругового конуса с вершиной в точке цели и с заданным углом полураствора в прямом или обратном направлении с заданным периодом вращения.
| РАЗОРЕНОВ Г.Н | |||
| и др | |||
| Системы управления летательными аппаратами (баллистическими ракетами и их головными частями) | |||
| Учебник для вузов | |||
| Г.Н.РАЗОРЕНОВ, Э.А.БАХРАМОВ, Ю.Ф.ТИТОВ | |||
| / Под ред | |||
| Г.Н.РАЗОРЕНОВА | |||
| - М.: Машиностроение, 2003, с.409, 420 | |||
| СПОСОБ ЗАДАНИЯ МАРШРУТА ДВИЖЕНИЯ ПЛАНИРУЮЩЕГО ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕРМИНАЛЬНЫМ УПРАВЛЕНИЕМ | 2003 |
|
RU2251664C1 |
| Приспособление к микроскопу для зарисовки рассматриваемых в проходящем свете препаратов | 1936 |
|
SU49361A1 |

