2.Самоходная машнкв, содержащая двигатепь, связанный через коробку перемены передач с колесами основного веду щего моста, и привод копес допопнитепьного ведущего моста, включающий передачу с постоянным передаточным числом, представшклцую собой гидропередачу с системой подпитки, и содержащий в цепи кинематической связи с вторичным вапом коробки перемены передач элемент скольжения в виде дифференциала, одно звено которого соединено с вторинвым валом коробки перемены передач, второес передачей с постоянным передаточным числом, а реактивное звено соединено с валсм насоса скольжения, в напорной гидролинии которого установлен регулируемый дроссель, управляемый регулятор тягового усилия, отличающаяся тем, что, с целью уменьшения неравномер ностк износа шин копес основного и дополнительного ведущих мостов в случае использования на ведущих мостах шин разной износостойкости путем изменения соотношения тяговых усилий на ведущих мостах в зависимости от скорости движения, она снабжена нелинейным преобразователем сигнатт, установленным между выходом сравнивающего устройства и входом перемножающего устройства регулятора тягового усилия,
3.Самоходная машина, содержащая двигатель, связанный через коробку пере мены передач с колесами основного ведущего моста, и привод колес дополнительного ведущего моста, включающий передачу с постоянным передаточным числом, представляющую собой гидропередачу с системой подпитки, и содержащий в цепи кинематической связи с вторичным валсум коробки перемены передач элемент скольжения в виде дифференциала одно звено которого соединено с вторичным валом коробки перемены передач, второе - с передачей с постоянным передаточным числом, а реактивное звено соединено с валсы насоса скольжения, в напорной гидролинии которого установлен регулируемый дроссель, управляемый регулятором тягового усилия, отличающаяся тем, что, с целью улучшения тягово-сцепны X бвойств машины за счет повышения точности регутгарования COOT ношения тяговых усилий на ведущих мостах, регуттатор тягового усилия выпопнен в вида эолотшпса с корпусом, полоо ти которого разделены двумя дросселями для прохода во встречных направоевиях
рабочей жидкости соответственно через дроссель постоянного сечения, от Насоса скольжения, а через дроссель переменного сечения для подпитки гидропередачи, причем, дроссель переменного сечения выполнен в виде стержня с наклонной или винтовой канавкой, закрепленного на корпусе и входящего в канал золотника для прохода рабочей жидкости ш подпитку гидропередачи.
4.Самоходная машина, содержащая двигатель, связанный через коробку перемены передач с колесами основногхэ ведущего моста, я привод колес дополнительного ведущего моста, включающий передачу с постоянным передаточным числом, представляющую собой гидропередачу с системой подпитки, и содержащий в цеп кинематической связи с вторичным валом коробки перемены передач элемент скольжения в виде дифференциала, одно звено которого соединено с вторичным валом коробки перемены передач, второе - с передачей с постоянным передаточным числом, а реактивное звено соединено с валом насоса скольжения, в напорной гид ролинии которого установлен регулируемый дроссель, управляемый регулятором тягового усилия, отличающаяся тем, что, с целью повыщения ее надежности путем обеспечения тягового усилия на дополнительном ведущем мосту при трогании с места, между золотником и корпусом регулятора тягового усилия в осевом направлении установлена пружина для уменыиения проходного сечения регулируемого дросселя потока скольжения,
5.Самоходная машина, содержащая двигатель, связанный через коробку перемены передач с колесами основного ведущего моста, и привод дополнительного ведущего моста, включающий передачу с постоянным передаточным числом, пред- ставляющую собой гидропередачу с сиотемой подпитки, и содержащий в цепи нематической связи с вторичным валсям коробки перемены передач элемент скольжения в виде дифференциала, одно звено которого соединено с вторичным валом коробки перемены передач, второе - с передачей с постоянным передаточным числом, а реактивное звено соединено с валом насоса скольжения, в напорной гвдрогшшга которого установлен регутдаруемый дроссель, управляемый регулятором тягового усилия, отличающая с я тем, что, с палью пошлшенкя эффективности торможения самоходной маоганы пут0м использования пврераспред
пения сцепного веса, зопотник рег сятора обеспечения уменьшения проходного сече, тягового уситшя расположен параппепьнония регулируемого дросселя при торможепродольной оси самоходной машины дляник самоходной машины.
1059746
1. Самоходная машинд, содержащая : двигатель, связанный через коробку перемены передач с колесами основвогх веду щего моста, и привод колес допопнитепшо го ведущего моста,включающий передачу с постоянным передаточным числрм.представ ляющую собой гидропередачу с системой . Ак/йГ/г 3 ,..1 i Jjicj - t nr-. подпитки,и содержащий в цепи кинематичео Гкой связи с вторичным валом коробки пере мены передач элемент скольжения в виде .| дифференциала,одно звено которого соедине-. во с вторичным валом коробки перемены передач, второе с передачей с постоянным передаточным числом, а реактивное эвеж соединено с валом насоса скопьжетш, в напорной гидролиниикоторого установлен регулируемый дроссель, управляемый регулятором тягового усилия, о тл и чающаяся тем, что, с цетшю улучшения тягюво-спепных свойств маши.ны за счет повышения точности регулирования соотношения тяговых усилий на ведущих мостах, она снабжена установлен- . ным в регуляторе тягового усилия срав(Л нивающим устройством, один вход которого соединен с измерителем разности частоты вращения входного и выхйдного валов элемента скольжения, а второй - с вы ЕОДом перемножающего устройства, один вход KOTojporo соединен с выходом упомянутрго сравнивающего устройства, а j второй - с измерителем крутящего - Та ш дополнительном ведущем мосту. со vj 05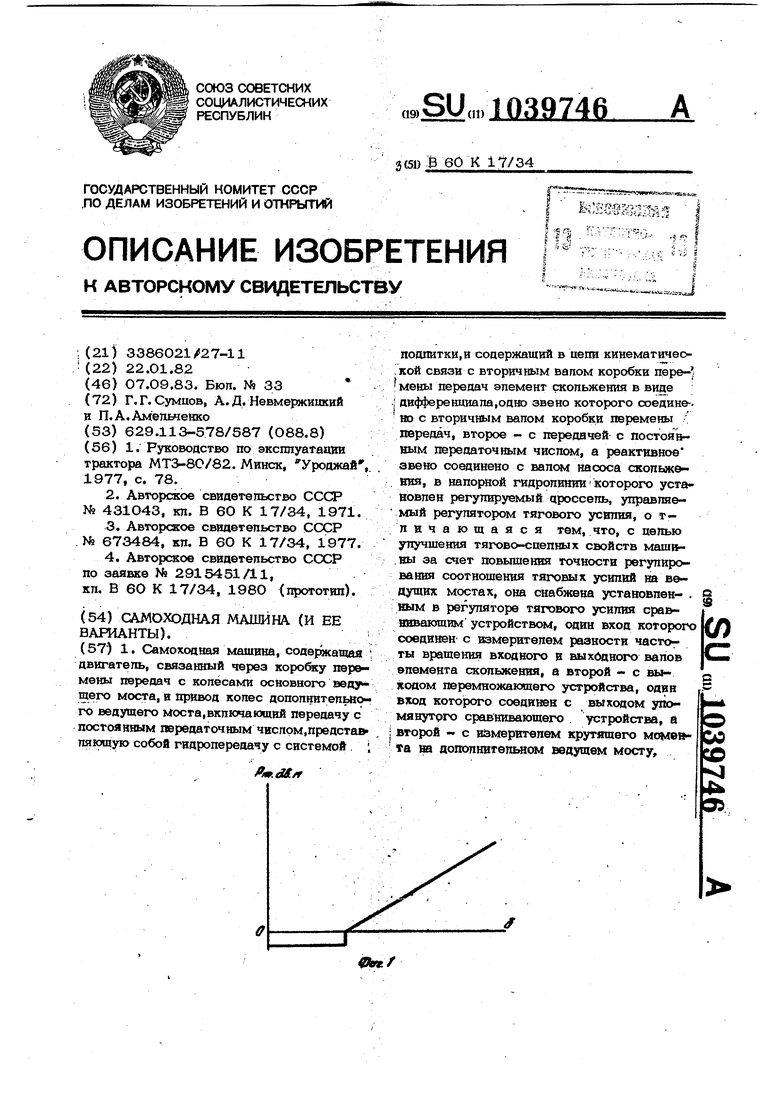

1
Изобретение относится к транспортному машиностроению и, в частности, может быть использовано 6 тракторах, самоходных сельскохозяйственных машинах, автомобипях, тягачах и автотракторных поездах.
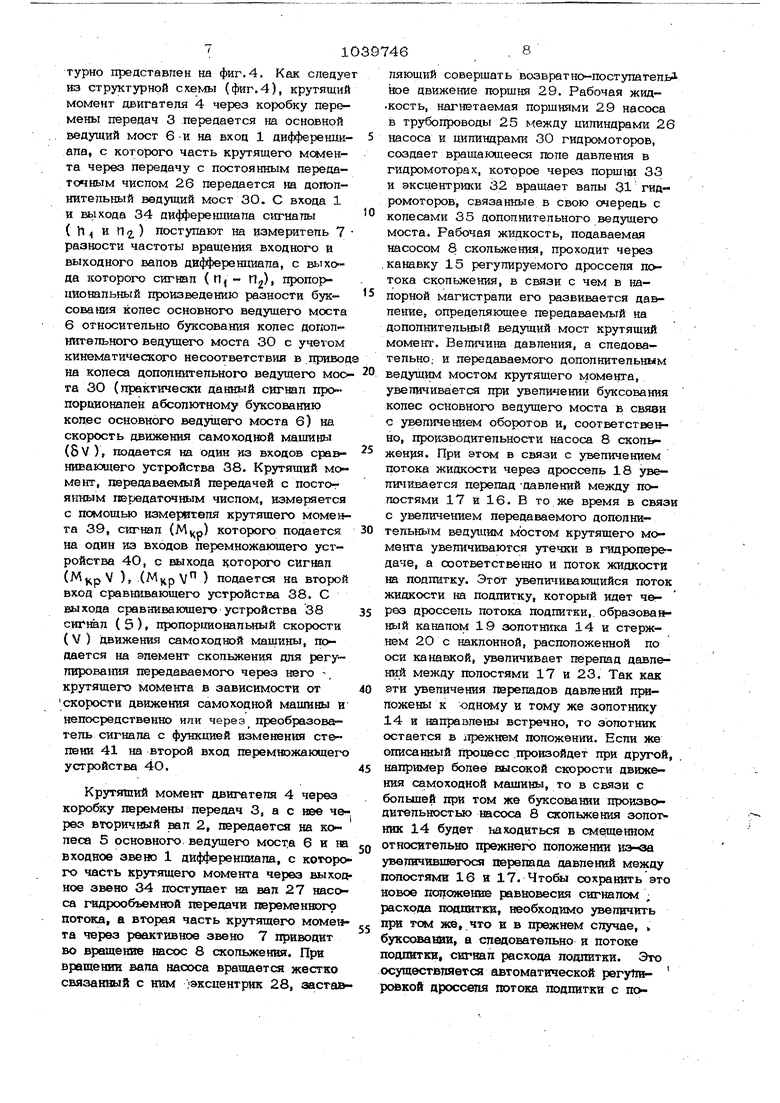
Известна самоходная машина, напри мер трактор, содержащая привод дополнительного ведущего моста, в котором выходной вал коробки перемены передач через обгонную муфту и карданный вал соединен с дифференциалом, два звена которого через несколько конических зубчатых передач соединены с колесами. Регутпфование тягового усилия у дополнительного ведущего моста данной самохо ной машины осуществляется устройством (обгонной муфтой), в котором в приводе к KoJiecaM дополнительно ведуи1его моста заложено определенное кинематическое несоответствие, и заключается в том, что крутящий момент на дополнительный ведущий мост передается после того, как будет достигнуто определенное буксование колес основного ведущего моста. (на фиг. I изображена зависимость тягового усилия дополнительного ведущего моста от буксования) l .
Недостатками самоходной машины с данной конструкцией привода дополнитапьного ведущего моста являются относительно невысокий КПД, большая сложность, а также неправильное на больши стве режимов работы распределение тягового усилия между основным и дополнительным ведущими мостами самоходной машины. Как следует из графика (фиг.1 при небольшом буксовании дополнительгный ведущий мост не тянет, но про- , кручиваег всю мехайическую передачу в обратную сторону (обычно в сторону повышения частоты вращения вапов,т.е. с более низким КПД), что явтшется причви ной снижения тягового КПД и повышенного износа шин колес. Кроме того, давный хфивод снабжен органом управления, имеющим три положения: Автоматичесжое включение , Принудительное включение,
.Отключен. При неправильном, ошибочном управлении дополнительным ведущим мостом данной конструкции указанные недостатки усугубгшются.
Известна также самоходная машина, например трактор, содержащая привод дополнительного ведущего моста, который состоит из элемента скольжания, выполненного в виде дифференциала, одно звено которого соединено с вторичным валом коробки перемены передач, второе звено через передачу с постоянным передаточным числом (кардан) - с межколеоным дифференциалом дополнительного ведущего моста, иь еющим связь с колесами через конические зубчатые пере.дачи, а реактивное звено соединено с , валом насоса скольжения, в напорной магистрали которого установлен регулируемый дроссель 2.
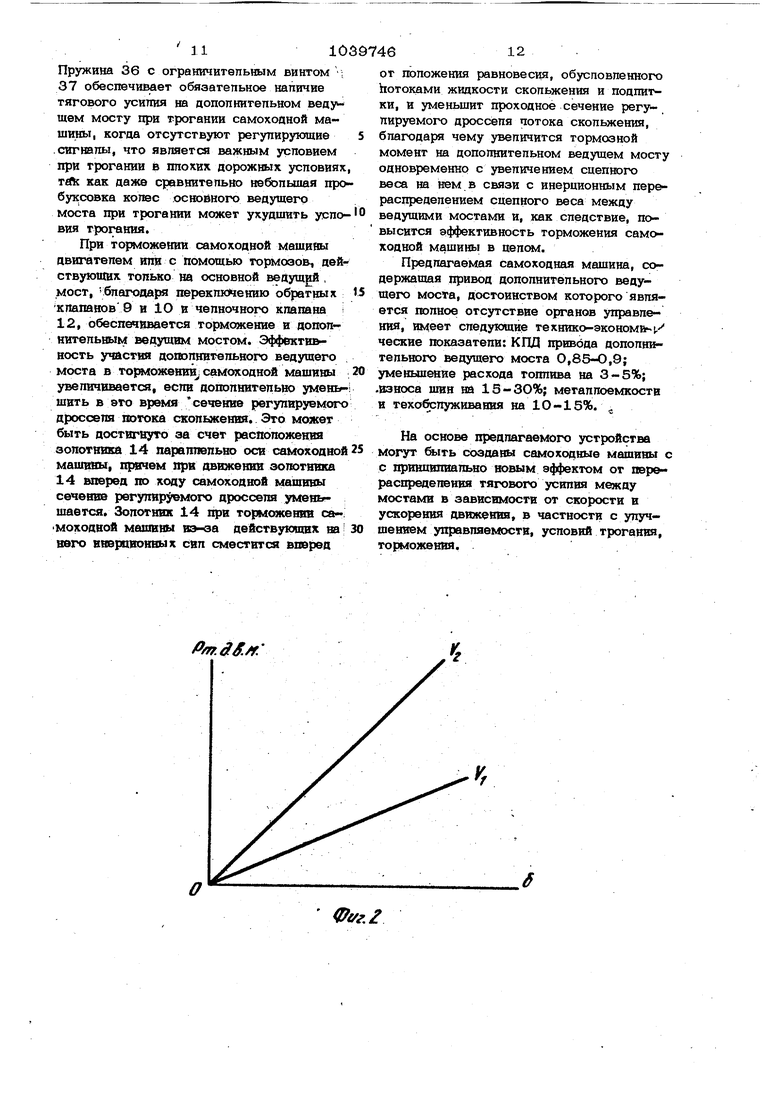
Регулирование тягового усилия до- , полнитепьного ведущего моста данной самоходной машины осуществляется автсн матически в зависимости от абсолютно разницы линейных скоростей вращения на колесах основного и дополнитеттьного ведущих мостов. Разница угловых скоростей вращения входного и выходного валов, . дифференциала пропорхгаональва произведению буксования колес основного ведущего моста на скорость движения самоходной машины. В данном случае тяговое усилие на дополнительном веаутцем мосту прямо пропорционально произведению буксования колес основного ведущего мостина скорость движения самохоаиой машины что может быть выражено формулой
PT-A-B-M.-XSV,
где Р & ил тяговое усшгае на допопвпвтепьнотл ведущем мосту;
К - коэффициент пропорциовапы ности;
S - буксование колес основного ведущего моста;
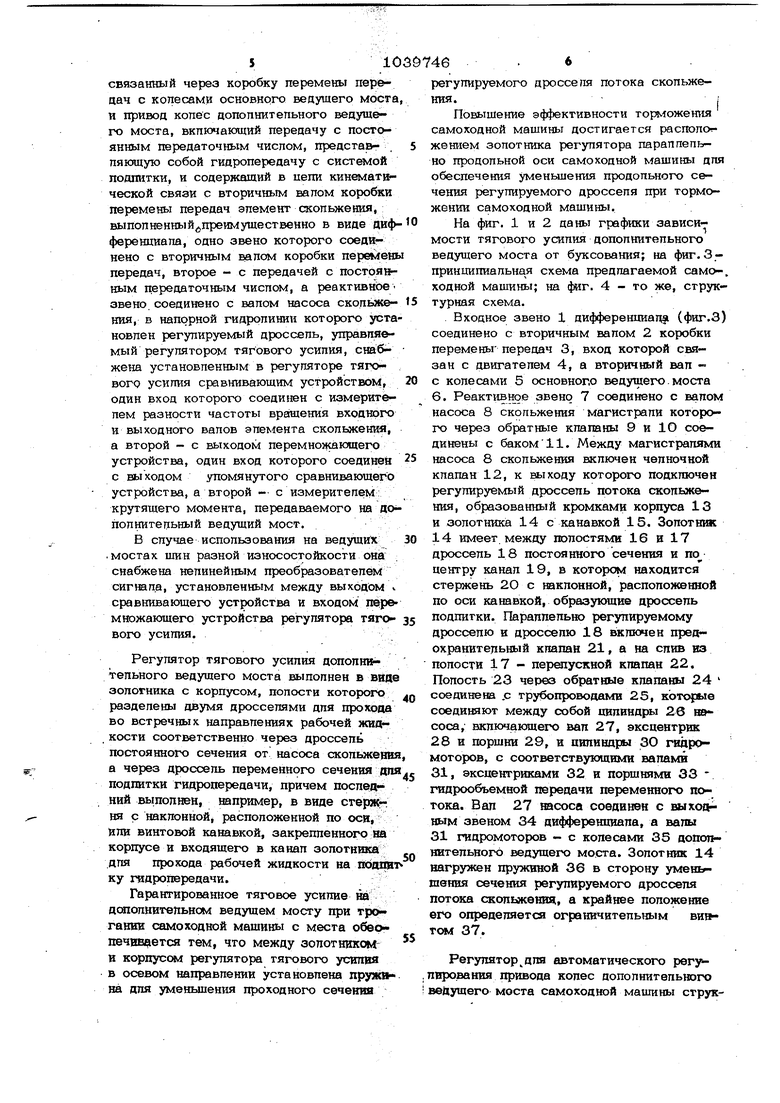
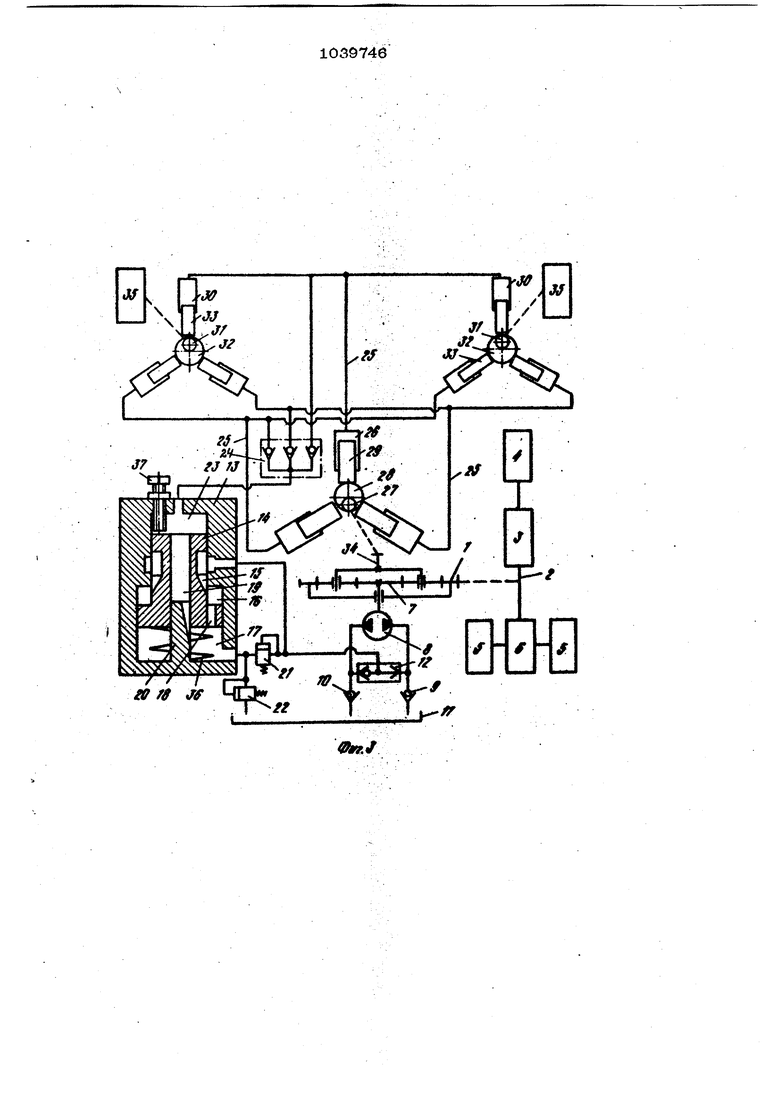
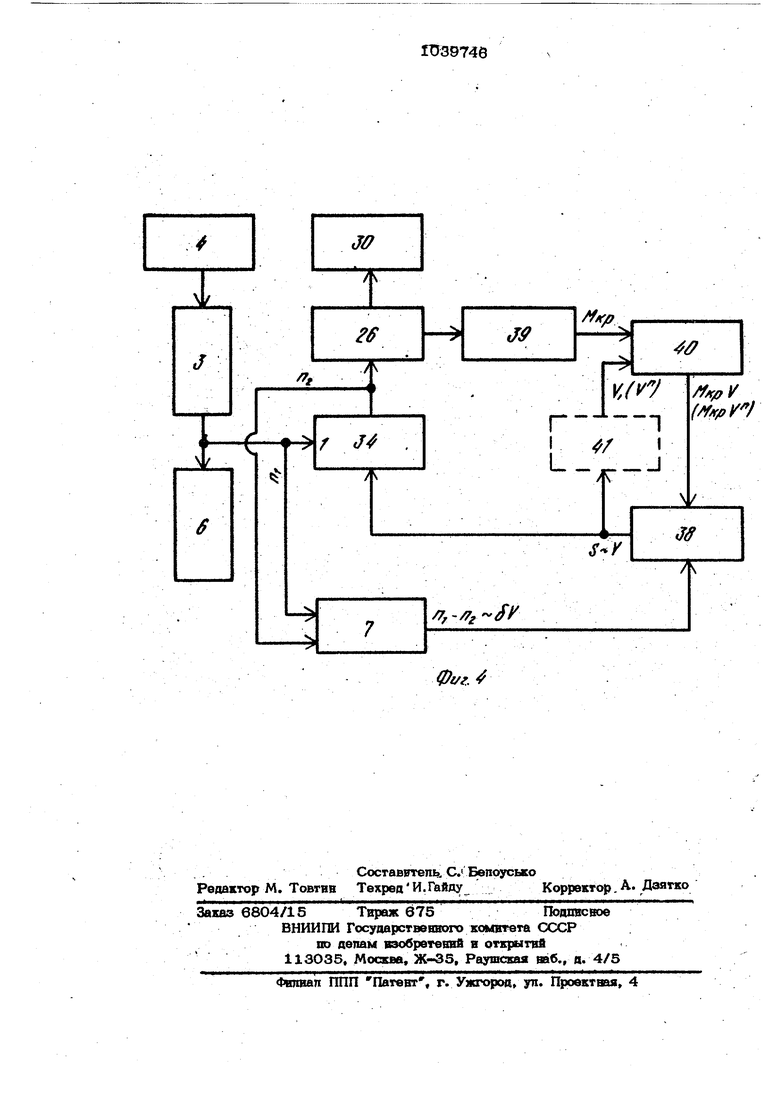
V - скорость движения само ходвой машины. Регулирование тягового усилия на допопнитепьном ведущем мосту самоходной машины осуществляется устройством, выполненным в виде дифференциала с за«дросселированным и регулируемым вручн дросселем насосом скольжения. При этом производительность насоса скольжения зависит как от буксования ведущих колес основного ведущего моста, так и от скорости движения самоходной машины, а величина передаваемого на дополнитепь ный ведущий мост крутящего момента от давления, развиваемого на дросселе насоса скольжения, которое в свою очерезь зависит от производительности наcoca скольжения, т.е. при одном и том же буксовании ведущих колес основного ведущего моста тяговое усилие на дополнительном ведущем мосту зависит от скорости движения самоходной машины. Сечение регулируемого дросселя потока скопьжения можно отрегулировать под какую-то одну скорорть движения, абсолютное же большинство самоходных машин работает в широком скоростном диапазоне и поэтсыу указанная особенность привода является недостатком, так как при мапой скорости движения на дополнительный ведущий мост будет передават ся слишком малый крутящий момент, а при большой - слишком большой (см. фиг. 2, где изображена зависимость тягового усилия дополнительного ведущего моста от буксоватш). Обеспечивать вручную необходимое управление регулируемым дросселем потока скольжения практически невозможно. Кроме того, самоходная машина с описанным приводо дополнительного ведущего моста сложна, имеет низкий КГЩ и долговечность из-за большого количества зубчатых передач, подшипников, карданного вала. Компоновка привода дополнительного ведущего моста данной конструкции на самоходной машине затруднена. Неудобством является также необходимость (при реверсе движения самоходной машины) переключе ния магистралей насоса скольжения с по мощью золотника. Известна также самоходная машина, содержащая привод дополнительного веду щего моста, который состоит из элемент скольжения, выполненного в виде дифферешшапа, одно звено которого соедвнено с вторичным валом коробки перемевы передач, второе звено через передачу с постоянным 1юредаточным числом (кардав) - с межколесным двфферентасатюм допопнительно ро ведущего моста, имеющим связь с колесами через конические еубчатые передачи, а реактивное звено соединено с валом насоса скольжения, в напорной магистрали которого установлен дроссель, регулируемый центробежным регулятором, связанным с одним из BarjOB дополнительногчэ ведущего морга. В этом случае регулирование тягового усилия дополнительногхэ ведущего моста осуществляется прямо пропорционально частному от деления буксова гая колес основного ведущего моста на скорость движения самоходной машины з, что можно выразить формулой Р- k - т.д.е.м. V Недостатком регулирования тягового усилия дополнительного ведущего моста данной конструкции является нелинейность характеристики центробежного регулятора, что значительно сужает диапазон автоматического регулирования приемлемого качества. Кроме того, устройство является сложным по конструкции и не позволяет уменьшить неравномерность износа шин основного и .дополнительного ведущих мостов в случае использова.ния на них шин разной износостойкости, обеспечить гарантированное участие дополнительного ведущего моста при трогании самоходной машины с места и увеличить участие дополнительного ведущего моста в торможении транспортного средства лри перераспределении сцепного веса. Известна самоходная машина, содери. жащая двигатель, связанный через коробку перемены передач с колесами основного ведущего моста, и привод колес дополнительного ведущего моста, включающий передачу с постоянным передаточным числом, представляющую собой гидропередачу с системой подпитки, и содержащий, в цепи кинематической связи с вторич-, ным валом коробки перемены передач элемент скольжения, в виде дифференциала, одно звено которого соединено с вторичным валом ifopodKB перемены передач, второе - с передачей с постоянным передаточным числом, а реактивное звено соединено с валом насоса скольжения, в напорной гидропинии которого установлен регулируемый дроссель, управляемый реуляторся тягового усилия 4. Цель изобретения - повышение тяговопепных свойств за счет повышения точости регутвдрованда соотношения тяговых усилий m ведущих мостах. Указанная цепь достигается тем, что амохоаная машнш, содержащая дввгатепь, связанный черээ коробку перемены передач с колесами основного ведущего моста и привод копес дополнительного ведущего моста, включающий передачу с постоянным передаточным числом, представ- . ляющую собой гидропередачу с системой подпитки, и содержащий в цепи кинематической связи с вторичным ваттам коробки перемены передач элемент скольжения, выполненный преимущественно в виде диф ференциала, одно звено которого соединено с вторичным валом коробки перемены передач, второе - с передачей с постоянным передаточным числом, а реактивное звено, соединено с валом насоса скольжеНИН, в напорной гидролинии которого уста новлен регулируемый дроссель, управляемый регулятором тягового усилия, снабжена установленным в регупяторе тяго вого усилия сравнивающим устройством, один вход которого соединен с измерителем разности частоты врепцения входного и выходного валов элемента скольжения, а второй - с выходом перемноз сающего устройства, один вход которого соединен с выходом упомянутого сравнивающего устройства, а второй - с измеритепем: крутящего момента, передаваемого на до полнительный ведущий мост. В случае использования на ведущих мостах шин разной износостойкости она снабжена нелинейным преобразователем сигнала, установленным между выходом сравнивающего устройства и входом пере множающего устройства регулятора тягового усилия. Регулятор тягового усилия допопивн тельного ведущего моста выполнен в вйпе золотника с корпусом, полости которого разделены двумя дроссетгами для прохода во встречных направлениях рабочей жидкости соответственно через дроссель постоянного сечения от насоса скольжевня а через дроссель переменного сечения для подпитки гидропередачи, причем последний вьшолнвн, например, в виде стерж-. ня с наклонной, расположенной по оси, И71И винтовой канавкой, закрепленного на корпусе и входящего в канал золотника для прохода рабочей жидкости на подш ку гидропередачи. Гарантированное тяговое усилие на дсэтолнитепьном ведущем мосту при трогакки самоходной машины с места обео печивается тем, что между золотникоми корпусе регулятора тягового усилия в осевом направлении установлена пруж на для уменьшения проходного сечения регулируемого дросселя потока скольжения. Повышение эффективности торт 1ожения самоходной машины достигается распологжением золотника регулятора параллельно продольной оси самоходной машины для обеспечения уменьшения продольного сечения регулируемого дросселя при торможении самоходной машины. На фиг. 1 и 2 даны графики зависимости тягового усилия дополнительного ведущего моста от буксования; на фиг.Зприниипиальная схема предлагаемой само-, ходной машины; на фиг. 4 - то же, структурная схема. Входное звено 1 дифференш1ащ1 (фиг.З) соединено с вторичным валом 2 коробки перемены передач 3, вход которой связан с двигателем 4, а вторичный вал с колесами 5 основного ведущего. моста 6. Реактивное звено 7 соединено с валом насоса 8 скопьжения магистрали которого через обратные клапаны 9 и 1О соединены с баком11. Между магистралями насоса 8 скольжения включен челночной клапан 12, к выходу которого подключен регулируемый дроссель потока скольжения, образованный кромками корпуса 13 и золотника 14 с канавкой 15. Золотшж 14 имеет между полостями 16 и 17 дроссель 18 постоянного сечения и по центру канал 19, в котором находится стержень 2О с наклонной, расположенной по оси канавкой, образующие дроссель подпитки. Паралпельно регулируемому дросселю и дросселю 18 включен предохранительный клапан 21, а на слив из полости 17 - перепускной клапан 22. Полость 23 через обратные клапаны 24 соединеиа .с трубопроводами 25, которые соединяют между собой цилиндры 26 нвсоса, включающего вал 27, эксцентрик 28 и поршни 29, и цилиндры ЗО гидромоторов, с соответствующими валами 31, эксцентриками 32 и поршнями 33 гидрообъемной передачи переменного потока. Ban 27 насоса соединен с выхо I&JM звеном 34 дифференциала, а ватол 31 гидромоторов - с колесами 35 дополнительного ведущего моста. Золотник 14 нагружен пружиной 36 в сторону умеш швния сечения регулируемого дросселя потока сколыкени, а крайнее положение его определяется ограничительным 37. Регулятору для автоматического регу ирования привода колес дополнительного вейущего моста самоходной машины структурнр представпен на фиг. 4. Как следуе из структурной схемы (фиг.4), крутящий момент двигателя 4 через коробку перемены передач 3 передается на основной ведущий мост 6 -и на вход 1 дифферендиапа, с которого часть крутящего мсмента через передачу с постоянным передаточным чиспом 26 передается нн допопнитепьный ведущий мост 30. С входа 1 и вь1хода 34 дифференциала сигналы ( П и П2.) поступают на измеритель 7 разности частоты вращения входного и выходного валов дифференциала, с выхода которого сигнал (П|- П2), пропо{ циональный произведению разности бук-сования колес основного ведущего моста 6 относительно буксования колес дополнительного ведущего моста ЗО с учетом кинематического несоответствия в привод на колеса дополнительного ведущего моста 30 (практически данный сигнал пропорционален абсолютному буксованию колес основного ведущего моста 6) на скорость движения самоходной (8V ), гюдается на один йз входов оравннвающего устройства 38. Крутящий момент, передаваемый передачей с постог янным передаточным числом, измеряется с помощью измерителя крутящего момента 39, сигнал (Мцр) которого подается на один из входов перемножающего устройства 40, с выхода которого сигнал ( ), (МцАМ ) подается на второй вход сравнивающего устройства 38. С выхода сравнивающего устройства 38 сигнал { 5 ), пропорциональный скорости (V ) движения самоходной машины, подается на элемент скольжения для регулирова тя передаваемого через него -, крутящего момента в зависимости от скорости движения самоходной машины и непосредственно или через преобразователь сигнала с функцией изменения ст пени 41 на второй вход пе.ремножающего устройства 4О. Крутяший момент двигателя 4 через коробку перемены передач 3, а с нее че рез вторичный вал 2, передается на колеса 5 основного ведущего мост;а 6 и на входное звено 1 дифференциала, с которо го часть крутящего момента через выход ное звено 34 поступает на вал 27 насо са пщрообъемной передачи переменного потока, а вторая часть крутящего момет та через реактивное звено 7 приводит во вращекве насос 8 скольжения. При вращении вапа насоса вращается жестко связанный с ним ,эксцентрик 28, аастав ляющий совершать воавратно-поступатель Ное движение поршня 29. Рабочая жидкость, нагнетаемая поршнями 29 насоса в трубопроводы 25 цилиндрами 26 насоса и цилиндрами 30 гидромоторов, создает вращаквдееся поле давления в гидромоторах, которое через поршни 33 и эксцентрики 32 вращает валы 31 гидромоторов, связанные в свою очередь с колесами 35 дополнительного ведущего моста. Рабочая жидкость, подаваемая насосом 8 скольжения, проходит через канавку 15 регулируемого дросселя потока скольжения, в связи с чем в напорной магистрали его развивается давление, определяющее передаваемый на дополнительный ведущий мост крутящий момент. Величина давления, а следовательно, и передаваемого дополнительным ведущим мостом крутящего момента, увеличивается при увеличении буксования колес ОСНОВНОГО) ведущего моста в связи с увеличением оборотов и, соответственно, производительности насоса 8 скольженря. При этом в связи с увеличением потока жидкости через дроссель 18 увеличивается перепад -давлений между полостями 17 и 16. В то же время в связи с увеличением передаваемого дополнительным ведущим мостом крутящего момента увеличиваются утечки в гидропере™ даче, а соответственно и поток жидкости на подпитку. Этот увеличивающийся поток жидкости на подпитку, который идет через дроссель потока подпитки, образованный каналом 19 золотника 14 и стержнем 20с наклонной, расположенной по оси канавкой, увеличивает шрепад давлений между полостями 17 и 23. Так как эти увеличения перепадов давлений приложены к -одному и тому же золотнику 14 и направлены встречно, то золотник остается в дтрежнем положении. Если Же описанный процесс произойдет при другой, например более высокой скорости движения самоходной машины, то в связи с большей при том же буксовании производительностью насоса 8 скольжения золотник 14 будет находиться в смещенном относительно прежнего положении вз-аа увелйчивиюгося перепада давлений между полостями 16 и 17. Чтобы сохранять это новое положение равновесия сигналом ; расхода подпитки, необходимо увеличить при том же, что и в прежнем случае, буксовании, а спедовательно и потоке подпитки, сигнал расхода подаштки. Это осущвствпяется автоматической perytraрс«кой дросселя потока подпитки с помощью стержня с накпонной, распопоже ной по оси канавкой, т.е. в новом жении зопотнгаш 14 увепичение перепада давпений между полостями 16 и 17 от .увеличения скорости самоходной машины будет уравновешено увеличением перепада давлений между голостями 17 и 23 иэ-за увеличения сопротивления дросселя потока подпитки, вызванного новым положением золоэд.ика 14. Изменение крутящего момента на дополнительном ведущем мосту можно вы разить аттгебраически. При этом условие равновесия для регулирующего золотншга QcK , . ; где QCI - поток скольжения; 0 - поток подпитки гидропередачи V - скорость движения самоходной машины; X - коэффициент пропорциональ- . ности.. Учитывая, что , где S - буксование колес основного ве-т дущего моста; 2 - коэффициент пропорииональнострг, а расход жидкости на подпитку практич&с ки прямо пропорционален рабочему давле нию гидромашин, которое определяет пе- редаваемый гидропередачей крутящий момент, т.е. , где Му;р- крутящий момент, передаваемый на дополнительный ведущий мост; Кз -коэффициент пропорционапьноо ти. Следователью, условие равновесия для регулирующего зопотшпса можно записать, где К 4 - коэффициент пропорциональност а -после сокращения оно примет вид , . регулятор тягового усилия обеспечиваёт передачу на дополнительный веду шйй мост крутящего момента, пропорционального буксированию колес основного ведущего моста. Иначе это можно обьflCHHfb тем, что поток скольжения зав сит как от буксования, так и от скорооти движения самоходной машины, а поток подшггки зависит только от передаваемого крутящего момента. Поэтому, чтобы обео 10 печить условия равновесия золотника 14 и увепичение сечения регулируемого дросселя при увеличении скорости движения самоходной машины, потребовапось сигнал потока подпитки умножить на скорость движения, что и осуществляется предлагаемым устройством. Подбором соотношения наклона канавки 15 и наклона канавки на стержне 20 можно обеспечить ка постоянство распределения тягового усилия между ведущими мостами, так и целенаправленное изменение распре- деления указанного усилия в зависимости от скорости движения самоходной мапганы. Например, если колеса дополнительного ведущего моста имеют меныиую износостойкость, чем колеса основного ведущего моста, то целесообразно, с целью уравнивания износа шин указанных колес при увеличении скорости движения самоходной машины (обычно транспортные работы на дорогах с хорошим покрь тием изменять распределение тягового УСИЛИЯ между мостами в сторону уменьшения его на дополнительном вечдущем мосту. Следует отметить отсутствие влияния на предлагаемый регупятор температуры рабочей жидкости, так как влияния изменения вяэ-i кости на дросселяк взаимно к ом пен-., сируются.- При этом может быть обеспечена пере« дача на дополнительный ведущий мост крутящего момента, который при отсутст- . ВИИ буксования колес основного ведущего моста 5, уравновесит сопротивление перекатыванию колес допошштепьного ведущего моста, а при наличии буксования величина крутящего момента дополнительного ведущего моста пропорционально увеличивается, обеспечивай оптимальные тягово-сцепные свойства самоходной машины. Максимальное з шчение крутящего момента, передаваемого на дополнительгный ведущий мост, ограничивается преа охранительным клапаном 21. Подпитка гидропередачи осуществляется через о ратные клапаны 24. Давление подпитки определяется настройкой перепускного клапана 22. , При движении задиим ходом изменяется направление вращения иасоса 8 скопь жения и происходит переключение обратных клапанов 9 и 10, что с помощью челночного клапана 12 обеспечивает аиалогичную переднему ходу работу привода.
Пружина 36 с ограничительным винтом ; 37 обеспечивает обязательное напичие тягового усилия на дополнительном веду щем мосту при трогании самоходной машиш 1, когда отсутствуют регулирующие 5 .сигналы, что является важным условием при трогании в плохих дорожных условиях, как даже сравнительно небольшая пробуксовка колес оснойного ведущехч) моста при трогании может ухудшить услоВИЯ трогания.
При торможении самоходной машины двигателем или с помощью тормсвов действуюишх только на основной вeдyщgй , мост, благодаря переключению обратных 15 клапанов9 и 1О и челночного клапана 12, обеспечивается торможение и дополнительным ведущим мостом. Эффективность участия дохюлнительного ведущего , моста в тo{лv{oжaнииJ самоходной машины 20 увеличивается, если дополнительно умень-i шить в это время сечение р©гупируемого дросселя штока скольжения. Это мткет быть достигнуто за счет расположения золотника 14 параптюпьно оси самоходной 25 машиш 1( ЩфЕчем при движении золотника 14 вперед по ходу самоходной машины сечение регутгар емого дросселя уменьшается. Золотник 14 при торможении са. моходной машины действующих га| 30 него инерпионвых еил сместится вперед
ftm.Sg./f:
.г
от положения равновесия, обусловленного hoTOKaMH жидкости скольжения и подпитки, и уменьшит проходное сечение регу-. Лируемого дросселя потока скольжения, благодаря чему увеличится тормозной момент на дополнительном ведущем мосту одновременно с увеличением сцепного веса на кем в связи с инерционным перераспределением сцепного веса между ведущими мостами и, как следствие, повысится эффективность торможения самоходной машины в целсы.
Предлагаемая самоходная машина, содержащая привод дополнительного ведущего моста, достоинством которого является полное отсутствие органов управления, имеет следующие тexиикo-экoнoм ь ческие показатели: КПД привода дополнительйого ведущего моста 0,85-О,9; уменьшение расхода топлива на 3-5%; .износа шин на 15-30%; металлоемкости и техобслуживания на 10-15%.
На основе предлагаемого устройства могут &1ть созданы самоходные машины с принципиально {ювым эффектом от перераспределения тягового усилия между мостами в зависимости от скорости и ускорения движения, в частности с уттучшением управляемости, условий трогания, торможения..
Ф1/г.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Минск, Уроажай, 1977, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
