Изобретение относится к области создания систем управления летательных аппаратов с избыточным числом измерителей. При использовании «грубых» ЧЭ в инерциальных измерительных преобразователях возникают большие ошибки ориентации, которые приводят к практической расходимости навигационного решения, так что для «грубых» ЧЭ необходимо использовать нетрадиционные методы построения преобразователей.
Известна комплексная система летательного аппарата, включающая в себя навигационные датчики и системы, работающие на различных физических принципах (в том числе от спутниковой навигационной системы), а также включающая вычислительно-логические блоки комплексной системы, обеспечивающие информационный обмен между датчиками и системами и расчет необходимых параметров состояния летательного аппарата (ЛА): блок компенсации ошибок, блок формирования параметров состояния, блок, обеспечивающий сравнение однотипной информации, поступающей от различных измерителей [1].
Ограничением изобретения является избыточный набор сложных и дорогостоящих элементов и, как следствие, сложность и дороговизна всей системы в целом, и при этом, в частности, принципиальная неработоспособность с гораздо более дешевой малогабаритной БИНС с «грубыми» чувствительными элементами (ЧЭ).
Известно использование малогабаритных БИНС с «грубыми» чувствительными элементами [2, 3, 4].
Основное внимание в этих патентах уделено представлению преимуществ по сравнению с обычными традиционными блоками чувствительных элементов, основанных на использовании внешних датчиков навигационной информации (типа GPS), использовании демпфирования ошибок вычислительной платформы и т.д. Основным недостатком данных систем является невозможность длительного автономного режима при отключении спутниковой навигационной системы, что принципиально важно при постановке искусственных помех.
Известно инерциальное измерительное устройство измерения ускорений, основанное на использовании трех пар преобразователей ускорения, размещенных в корпусе, в котором дополнительно размещают три идентичных измерительных модуля, на каждом из которых параллельно друг другу устанавливают, по крайней мере, два преобразователя ускорения, образующих дифференциальную пару. В устройстве определяют эквивалентный центр масс каждой дифференциальной пары, после чего измерительные модули ориентируют между собой в корпусе таким образом, чтобы измерительные оси дифференциальных пар преобразователей были ортогональны друг другу, а эквивалентные центры масс всех дифференциальных пар преобразователей были расположены в пространстве, ограниченном сферой заданного диаметра, и определяют полный вектор ускорений [5].
Недостатками данного измерителя является низкая точность измерения параметров движения и ограниченность его функциональных возможностей, обусловленные отсутствием вычислительного устройства и блока для осуществления компенсации погрешностей выходных сигналов микромеханических датчиков. Другими недостатками данного способа являются ограниченный диапазон рабочих температур, обусловленный техническими характеристиками применяемых микромеханических датчиков, и низкая точность измерения параметров движения из-за отсутствия синхронизации информации с акселерометров, используемой при определении и компенсации нулевого сигнала.
Еще одним недостатком данного способа является отсутствие опроса всех акселерометров в один и тот же момент времени для определения величины составляющей нулевого сигнала.
Наиболее близким по технической сути является микромеханический инерциальный измерительный модуль, содержащий корпус, включающий основание и крышку, плату питания и настройки, плату преобразователей линейного ускорения, содержащую электронный блок обработки информации и коммутационную плату, первый и второй микромеханические акселерометры [6].
Недостатком этих устройств является существенная зависимость выходного сигнала датчика ускорения от воздействия вибрационных ускорений, а также временной и температурный дрейф нуля датчика и значительный собственный шум, свойственный всем МЭМС-датчикам ускорения.
Задачей, на которую направлено изобретение, является повышение точности инерциального измерительного устройства. Поставленная задача достигается за счет того, что в инерциальном измерительном устройстве, содержащем единую конструкцию одноосных микромеханических акселерометров и микромеханических датчиков угловых скоростей, состоящем из блока установки микромеханических акселерометров и микромеханических датчиков угловых скоростей, согласно изобретению, в блок микромеханических акселерометров и микромеханических угловых скоростей дополнительно введены одноосные микромеханические акселерометры и микромеханические датчики угловых скоростей, причем не менее двух, дополнительно введен электронный вычислительный блок, входы которого соединены с выходами микроконтроллеров блока микромеханических акселерометров и микромеханических датчиков угловых скоростей, введены датчики температуры для всех микромеханических акселерометров и микромеханических датчиков угловых скоростей, введены преобразователи сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, введен блок энергонезависимой памяти, электронный вычислительный блок содержит микроконтроллер микромеханических акселерометров, микроконтроллер микромеханических датчиков угловых скоростей, микропроцессор, причем входы/выходы микропроцессора соединены с входами/выходами микроконтроллеров и преобразователей сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, с выходами преобразователей датчиков температуры инерциального измерительного блока, энергонезависимой памятью, с выходами спутниковой навигационной системы. Признаком, отличающим известные решения от предлагаемого, является то, что в блок микромеханических акселерометров и микромеханических угловых скоростей дополнительно введены одноосные микромеханические акселерометры и микромеханические датчики угловых скоростей, причем не менее двух, дополнительно введен электронный вычислительный блок, входы которого соединены с выходами микроконтроллеров блока микромеханических акселерометров и микромеханических датчиков угловых скоростей, введены датчики температуры для всех микромеханических акселерометров и микромеханических датчиков угловых скоростей, введена спутниковая навигационная система, введены преобразователи сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, введен блок энергонезависимой памяти, электронный вычислительный блок содержит микроконтроллер микромеханических акселерометров, микроконтроллер микромеханических датчиков угловых скоростей, микропроцессор, причем входы/выходы микропроцессора соединены с входами/выходами микроконтроллеров и преобразователей сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, с выходами преобразователей датчиков температуры инерциального измерительного блока, энергонезависимой памятью, с выходами спутниковой навигационной системы. Дополнительные измерители инерциальной информации, а именно микромеханические акселерометры и микромеханические датчики угловых скоростей позволяют получать избыточную информацию по измеряемым параметрам - линейному ускорению и угловым скоростям. Таким образом, обеспечивается точность определения измеряемой информации.
Сигнал через устройства преобразования измерительных сигналов датчиков ускорения и через микроконтроллеры поступает на микропроцессор электронного вычислительного блока, в котором осуществляется анализ работы инерциального измерительного блока, датчиков и блока навигационной сигналов, и позволяет переходить в режим алгоритмических вычислений и работы энергонезависимого запоминающего устройства, где сохраняются параметры датчиков, блока навигационных сигналов. При этом каждое из устройств через соответствующие микроконтроллеры соединено с микропроцессором, где реализованы компенсации погрешностей микромеханических акселерометров и микромеханических датчиков угловых скоростей. Таким образом, заявляемое устройство позволяет с высокой точностью определять случайные дрейфы масштабных коэффициентов микромеханических датчиков угловых скоростей, дрейфы нулевых сигналов микромеханических акселерометров, а также углы неточной установки измерительных осей блока микромеханических акселерометров.
Предлагаемое устройство также производит оценку шумов и уменьшения их составляющих. По сигналу синхронизации от микропроцессора в один и тот же момент времени опрашиваются все инерциальные датчики, в результате чего сигналы от микромеханических акселерометров и микромеханических датчиков угловых скоростей поступают измерительные сигналы с устройств преобразования, после этого определяется величина составляющей нулевого сигнала микромеханических акселерометров, а также углы неточной установки измерительных осей блока микромеханических акселерометров.
Информация далее поступает на вход вычислителя для дальнейшей коррекции значений.
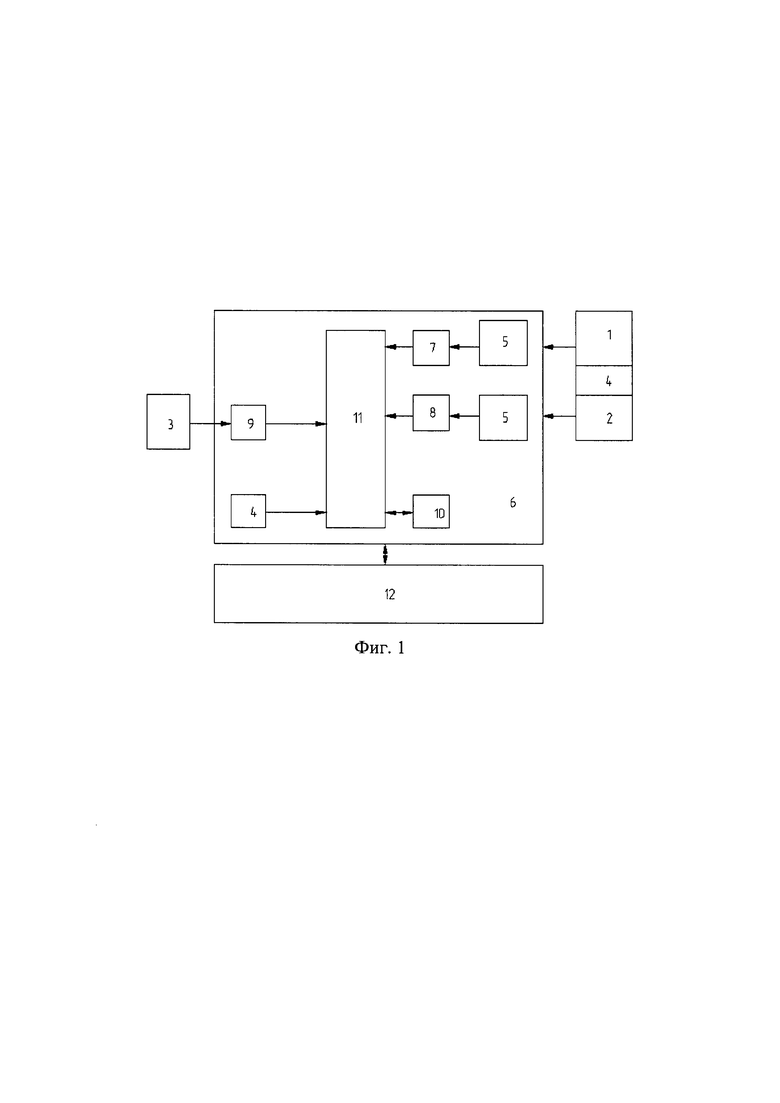
Схема инерциального измерительного устройства представлена на фиг. 1, где:
1 - блок микромеханических акселерометров,
2 - блок микромеханических датчиков угловых скоростей,
3 - блок спутниковых навигационных сигналов,
4 - блок датчиков температуры,
5 - преобразователи сигналов микромеханических акселерометров и датчиков угловых скоростей,
6 - электронный вычислительный блок,
7 - микроконтроллер блока микромеханических акселерометров,
8 - микроконтроллер блока микромеханических датчиков угловых скоростей,
9 - микроконтроллер блока спутниковых навигационных сигналов,
10 - энергонезависимая память,
11- микропроцессор,
12 - блок управления объектом.
Инерциальный измерительный преобразователь содержит блок микромеханических акселерометров 1, блок микромеханических датчиков угловых скоростей 2, блок датчиков температуры 4, в который входит несколько датчиков и размещается внутри каждого датчика ускорения и датчика угловых скоростей. Блок спутниковых навигационных сигналов 3 возможно поставлять отдельно на общей механической платформе инерциального измерительного модуля или принимать сигналы от штатного, установленного на объекте.
Выходы с блока микромеханических акселерометров 1 и блока микромеханических датчиков угловых скоростей 2 поступают на соответствующие преобразователи сигналов микромеханических акселерометров и датчиков угловых скоростей 5. Датчики температуры установлены в одном корпусе микромеханического акселерометра и микромеханического датчика угловых скоростей. Выходы датчиков температуры соединены с блоком преобразования датчиков температуры (не показаны). Выходы преобразователя сигналов 5 соединены с соответствующими микроконтроллерами 7 и 8, а выходы преобразователя датчиков температуры соединены с блоком температурной компенсации микропроцессора 11. Выход блока спутниковых навигационных сигналов 3 соединен через микроконтроллер блока спутниковых навигационных сигналов 9 с микропроцессором 11. Энергонезависимая память 10 соединена с микропроцессором 11. Сигнал с микропроцессора 11 поступает на блок управления объектом 12. Это может быть БПЛА, например.
Устройство работает следующим образом.
Сигнал от микромеханических акселерометров 1 и микромеханических датчиков угловых скоростей 2 поступает на блоки преобразователь сигналов инерциальных датчиков 5. Блок датчиков температуры 4, в который входит несколько датчиков, размещается внутри каждого датчика ускорения и датчика угловых скоростей. Блок спутниковых навигационных сигналов 3 возможно поставлять отдельно на общей механической платформе инерциального измерительного модуля или возможно принимать сигналы от штатного, установленного на объекте. Соединение располагаемых на блоках 1, 2, 3, 4 элементов между собой, а также соединение с элементами, входящими в состав электронного вычислительного блока 6, осуществляется разъемными и неразъемными соединениями посредством ленточных кабелей и монтажных проводов.
В электронном вычислительном блоке 6 осуществляют преобразования измерительных сигналов датчиков, например, преобразование «напряжение - частота». После подачи сигнала синхронизации в электронном вычислительном блоке выходной информации инерциальных датчиков, инициируемого электронным вычислительным блоком 6, в один и тот же момент времени опрашиваются все инерциальные датчики, в результате чего измерительные сигналы идут в виде цифрового кода с устройств преобразования 5 и через соответствующие микроконтроллеры 7 и 8, а выходы преобразователя датчиков температуры соединены с блоком температурной компенсации микропроцессора 11, где реализованы компенсации погрешностей микромеханических акселерометров и микромеханических датчиков угловых скоростей. Осуществляется анализ работы инерциального измерительного блока 1 и 2, датчиков 4 и блока навигационной сигналов 3 и позволяет переходить в режим алгоритмических вычислении и работы энергонезависимого запоминающего устройства 10, где сохраняются параметры датчиков, блока навигационных сигналов. Таким образом, заявляемое устройство позволяет с высокой точностью определять случайные дрейфы масштабных коэффициентов микромеханических датчиков угловых скоростей, дрейфы нулевых сигналов микромеханических акселерометров, а также углы неточной установки измерительных осей блока микромеханических акселерометров. Таким образом, осуществляется компенсация нелинейности масштабных коэффициентов инерциальных датчиков. Использование избыточного числа чувствительных элементов при выбранной схеме их размещения на основании позволяет повысить точность измерения в 2 раза, а также обеспечить высокую надежность измерения.
Таким образом, предлагаемое устройство по сравнению с известными устройствами того же назначения позволяет обеспечить необходимый технический результат, заключающийся в существенном уменьшении массогабаритных характеристик и упрощении обеспечения привязки осей чувствительности акселерометров, а также повышении надежности работы бесплатформенного инерциального блока за счет увеличения вероятности обнаружения и идентификации отказов при одновременном повышении точности измерений. Предлагаемое устройство расширяет функциональные возможности инерциального измерительного прибора, например БПЛА, и повышает точность измерения значений линейного ускорения микромеханических акселерометров и угловых скоростей микромеханических ДУСов.
Источники информации:
1. Патент РФ №2265190.
2. Патент US №6671648.
3. Патент US №6522992.
4. Патент US №6516283.
5. Патент РФ №2 416 099.
6. Патент РФ №65653 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
| Устройство для измерения ускорения | 2023 |
|
RU2808728C1 |
| МАЛОГАБАРИТНАЯ УПРАВЛЯЕМАЯ ВРАЩАЮЩАЯСЯ РАКЕТА | 2014 |
|
RU2561319C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2005 |
|
RU2298832C2 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Спутниковая инерциальная навигационная система для станций спутниковой связи | 2024 |
|
RU2836126C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
Изобретение относится к области создания систем управления летательных аппаратов с избыточным числом измерителей. В блок микромеханических акселерометров и микромеханических угловых скоростей дополнительно введены одноосные микромеханические акселерометры и микромеханические датчики угловых скоростей, электронный вычислительный блок, входы которого соединены с выходами микроконтроллеров блока микромеханических акселерометров и микромеханических датчиков угловых скоростей, датчики температуры, преобразователи сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, блок энергонезависимой памяти. При этом электронный вычислительный блок содержит микроконтроллер микромеханических акселерометров, микроконтроллер микромеханических датчиков угловых скоростей, микропроцессор, входы/выходы микропроцессора соединены с входами/выходами микроконтроллеров и преобразователей сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, с выходами преобразователей датчиков температуры инерциального измерительного блока, энергонезависимой памятью, с выходами спутниковой навигационной системы. Технический результат - повышение точности инерциального измерительного устройства. 1 ил.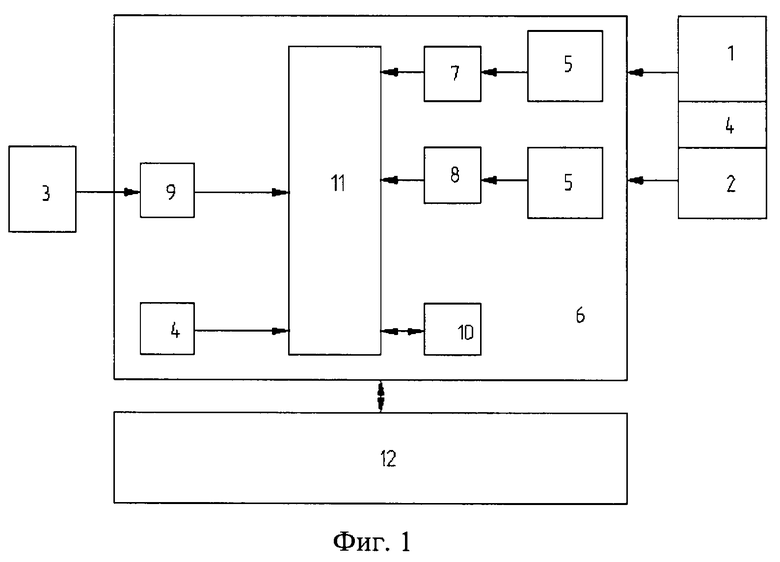
Инерциальное измерительное устройство, содержащее единую конструкцию одноосных микромеханических акселерометров и микромеханических датчиков угловых скоростей, состоящее из блока микромеханических акселерометров и микромеханических датчиков угловых скоростей, отличающееся тем, что в блок микромеханических акселерометров и микромеханических угловых скоростей дополнительно введены одноосные микромеханические акселерометры и микромеханические датчики угловых скоростей, причем не менее двух, дополнительно введен электронный вычислительный блок, входы которого соединены с выходами микроконтроллеров блока микромеханических акселерометров и микромеханических датчиков угловых скоростей, введены датчики температуры для всех микромеханических акселерометров и микромеханических датчиков угловых скоростей, введены преобразователи сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, введен блок энергонезависимой памяти, электронный вычислительный блок содержит микроконтроллер микромеханических акселерометров, микроконтроллер микромеханических датчиков угловых скоростей, микропроцессор, причем входы/выходы микропроцессора соединены с входами/выходами микроконтроллеров и преобразователей сигналов микромеханических акселерометров и микромеханических датчиков угловых скоростей, с выходами преобразователей датчиков температуры инерциального измерительного блока, энергонезависимой памятью, с выходами спутниковой навигационной системы.
| Бетонный или железобетонный блок (тюбинг) для туннельных обделок | 1944 |
|
SU65653A1 |
| Способ получения простых эфиров бутадиена-1,3 | 1958 |
|
SU117659A1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2416099C1 |
| US 6522992 B1, 18.02.2003 | |||
| ШАРНИРНОЕ СОЕДИНЕНИЕ ТРУБ | 0 |
|
SU163855A1 |
| US 20170146667 A1, 25.05.2017. | |||

